基于板块元法的Benchmark亮点聚类优化算法
2018-01-03郝保安万亚民杨伏洲范若楠
陈 原, 郝保安, 万亚民, 杨伏洲, 吕 维, 范若楠
(1. 中国船舶重工集团公司 第705研究所, 陕西 西安, 710077; 2. 水下信息与控制国家重点实验室, 陕西 西安, 710077)
基于板块元法的Benchmark亮点聚类优化算法
陈 原1,2, 郝保安1, 万亚民1, 杨伏洲1, 吕 维1, 范若楠1
(1. 中国船舶重工集团公司 第705研究所, 陕西 西安, 710077; 2. 水下信息与控制国家重点实验室, 陕西 西安, 710077)
针对现有鱼雷自导仿真中潜艇目标亮点模型精细化程度不高的问题, 应用板块元法的基本原理, 引用k-means聚类算法的主要思想, 提出Benchmark潜艇亮点聚类优化算法, 为鱼雷自导仿真构建精细化的潜艇亮点模型。文中对Benchmark潜艇3D模型面元进行划分, 计算面元回波声势函数, 然后利用初步的聚类算法进行面元运算, 建立 Benchmark亮点模型; 最后研究板块元法中的面元划分质量对仿真结果的影响及二次划分方法, 得出亮点模型的聚类优化算法。仿真结果表明, 文中所提聚类优化算法构建出的Benchmark亮点模型与现阶段常用的亮点模型相比精细化程度更高, 在纵轴方向上的起伏较平稳。文中研究可为鱼雷目标尺度识别研究提供参考。
鱼雷自导; 板块元法; 聚类算法; Benchmark; 亮点模型
0 引言
如何提高不同攻击态势下潜艇散射模型的精度, 一直是鱼雷自导系统仿真的重要研究方向[1]。传统的亮点模型大多采用几何划分法, 根据工程经验将潜艇目标的高亮反射区域设定在艇艏、艇体、舰桥和艇艉这些潜艇的大面积部位表面, 且亮点的数目设定为3~6个不等。传统的亮点模型构造对于潜艇模型的设定简化为圆柱体与球体的组合形状, 使得本身模型的精细化程度不足。同时, 传统的亮点模型大多只给出了亮点的数目及亮点模型的整体目标强度, 没有得出亮点在空间分布的情况。对于中近程态势下, 密集波束自导系统对于潜艇目标已经可以进行尺度识别, 因此只提供亮点的数目及整体的目标强度显然不够精细, 有必要提供亮点的空间分布情况。上海交通大学汤渭霖和范军等人[2-3]在水声领域引入了电磁波领域的板块元法, 这种方法能够对水中刚性表面及弹性表面目标强度实现精确快速预报, 可实现任意复杂形状目标的高频回声特性仿真。但板块元法是针对求取潜艇目标的整体目标强度而设计的方法, 无法直接应用到目标回波亮点模型的构建工作中, 因此, 为构建 Benchmark潜艇亮点模型, 可将聚类分析的理论与板块元法相结合进行算法的设计。
聚类分析是根据事物本身的特性对被聚类对象进行类别划分的方法, 原则是使同一类中的对象具有尽可能大的相似性, 而非同一类中的对象具有尽可能大的差异性[4]。聚类分析理论是数据挖掘的重要手段, 在许多领域都有广泛的应用,如统计学、图像处理、医疗诊断、信息检索、生物学以及机器学习[5]。为构建潜艇目标亮点模型,文中将聚类分析的思想与板块元进行结合, 以板块元的理论为基础, 结合中心聚类算法中的k-means聚类算法的主要思想, 提出了一种聚类优化算法, 建立了 Benchmark亮点模型, 从而开展目标尺度识别研究。
1 理论研究
1.1 板块元理论
工程上常用基于物理声学的 Kirchhoff近似方法对潜艇目标特性进行建模, 由此总结出的板块元法将Helmholtz-Kirchhoff积分方程简化为一个面积分, 使声场计算得到极大的简化。目标的散射声场在高频收发合置情况下通过边界条件可以表示为

式中: s是散射体表面; r是散射点矢径; V(θ)是表面散射系数。
对于复杂几何形状目标, 先进行目标表面的网格划分, 划分为NM×个网格, 得到一系列面元,ijS 。则SIΔ可以表示成

经过理论推导, 得到面元声势函数公式[7]

文中的聚类算法所利用的各面元回波声势函数可由上述的板块元法理论公式计算得出。
1.2 k-means聚类算法理论
基于划分的聚类算法是一种相对基础的聚类算法, 其中的k-means聚类算法的主要内容为:首先随机的选择 k个对象, 每个对象初始代表了一个类的平均值或中心, 对剩余的每个对象, 根据其与各个类中心的距离, 将它赋给最近的类,最后重新计算每个类的平均值, 这个过程不断重复, 直到准则函数收敛[8]。
k-means聚类算法对于亮点模型的构建具有一定的适用性。潜艇目标亮点模型的亮点可设为近似圆形的点, 因此可将聚类的中心作为圆心,将聚为一类的面元回波叠加后作为亮点的回波,而回波的模值即为亮点的强度。在空间上各个面元到亮点中心的距离可以作为聚类的主要依据,且亮点之间的距离需要满足鱼雷自导系统工作的分辨率, 在鱼雷自导系统可实现的前提下尽量提高亮点数目以增加亮点模型的精细程度。
2 Benchmark亮点模型聚类算法
针对k-means聚类算法与潜艇亮点模型问题存在的联系, 文中引用 k-means聚类算法原理,提出了一种Benchmark板块元模型的亮点聚类优化算法, 内容如下。
首先进行Benchmark潜艇模型的面元划分及艇身受到舰桥形状变化影响区域的二次划分。将面元的节点坐标和每个面元所对应的3个节点编号等必要数据整理后导入 Matlab中进行板块元计算, 得出面元的回波势函数 r 0i= ai+bi·j ,并计算面元的散射强度r=r0=和相位iiφi= arctan(biai)。针对正横态势, 为了减小数据量以提升计算效率, 只将正面面元中散射强度大于阈值的面元作为有效面元进行聚类。
其次, 将艉舵和舰桥部分与艇身部分进行分离。Benchmark潜艇3D模型侧视图如图1所示。

图1 Benchmark潜艇3D模型Fig. 1 Three-dimensional model of Benchmark submarine
坐标原点位于潜艇艇身部分的几何中心位置。直接依据面元中心的空间坐标进行艉舵部分和舰桥部分的分离, 剩余部分即为艇身。
之后, 进行面元中心偏角的求取。依据雷目距离, 将模型简化为xoy平面的2D情况。根据每个面元中心点到声源点的连线与声轴的夹角, 可以求出面元中心偏角iα。

求艇身部分面元偏角αi的最大值αmax和最小值αmin, 计算最大开角 β= αmax- αmin。依据鱼雷自导系统最大分辨率, 得出自导系统可分辨的最大亮点数目N。依据面元偏角信息对艇身部分进行区域划分, 划分示意图如图2所示。
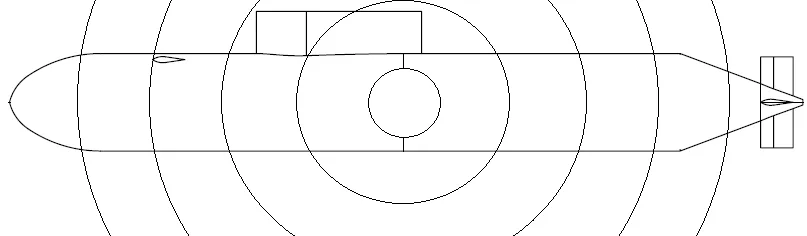
图2 潜艇艇身区域划分示意图Fig. 2 Schematic of region division for submarine body
通过仿真计算得出结果, 若出现亮点位置处于区域划分的边界位置且中心明显贴近边界, 说明该区域亮点位置明显趋于相邻区域, 则将该亮点所处于的边界两边的区域进行合并处理。之后,对每个区域进行相同的聚类运算, 步骤如下。
1) 以每个区域的几何中心(xc, yc, zc)为圆心,根据每个区域的x轴方向尺寸Δx和y轴方向上的尺寸Δy得出半径RC, 构造亮点圆的圆心坐标范围。
2) 将圆心坐标范围内所有面元中心点作为圆心, 以适当的尺寸为半径得到若干个亮点圆,如图 3所示, 将亮点圆内所有面元的回波进行叠加, 得到若干个亮点圆的总回波。由总回波的模值得到总散射强度rc= r0c。
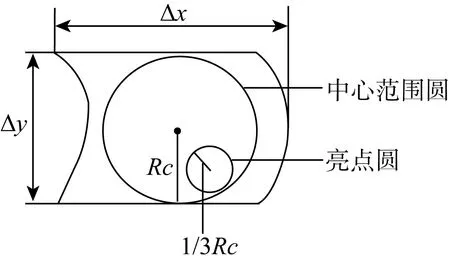
图3 亮区及亮点处理示意图Fig. 3 Schematic of highlight area and highlight processing
3) 求取若干个总散射强度中的最强散射强度值 rc_max, 将所有叠加散射强度 rc大小接近rc_max的亮点圆中心点的几何中心作为最后的亮点中心的坐标, 亮点的散射强度为 rc_max。
最后, 将舰桥和艇艉区域的几何中心作为亮点中心, 强度为整个区域面元回波的叠加散射强度, 得出整个潜艇的亮点模型。
3 仿真结果与分析
3.1 仿真模型
首先制作 Benchmark 3D模型, 将模型导入ANSYS软件中进行面元划分。在保证划分精细度的前提下为了减小处理数据量和编程复杂程度,文中划分的面元为三角面元, 划分结果如图 4所示。图5则是对艇身部分所有受舰桥影响的区域面元进行二次划分的划分结果。
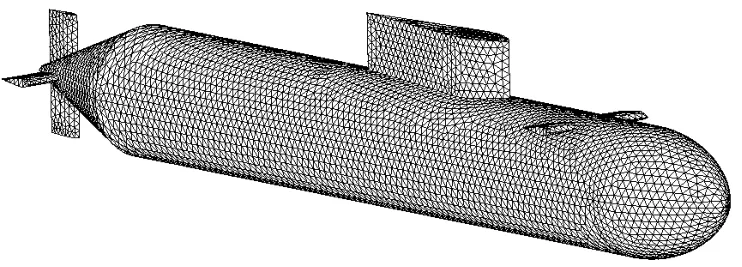
图4 潜艇模型面元划分示意图Fig. 4 Schematic of planar element division for submarine model
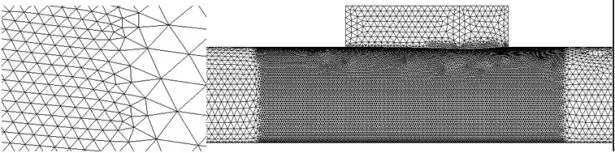
图5 二次划分示意图Fig. 5 Schematic of secondary division
将所有面元的节点坐标和每个面元所对应的3个节点编号导出。将数据整理后导入Matlab中进行算法的仿真计算。仿真选取的自导频率为20~40 kHz, 雷目距离为300 m, 雷目姿态为正横。
3.2 仿真结果
直接求取叠加散射强度最强点作为亮点中心, 且对潜艇模型未进行面元的二次划分与区域合并处理, 对 Benchmark模型进行仿真计算, 得到圆柱和Benchmark的亮点分布如图6所示。

图6 Benchmark亮点分布Fig. 6 Highlight distribution of Benchmark
图6 显示的仿真结果出现了明显的亮点上下起伏的情况, 根据水声学理论可知, 由于艇身中轴线位置面元散射强度较强, 且艇身形状为较规则柱体, 因此亮点应近似呈直线排列于潜艇艇身的中轴线位置。对于亮点出现上下起伏的情况进行分析, 主要原因为亮点直接取在了叠加散射强度最强的位置。仿真计算结果显示, 虽然最强散射圆只有一个, 然而当圆心选在若干个不同位置时其圆内回波叠加之和的散射强度与最终被定为亮点的亮点圆叠加散射强度的差值十分微小, 若只考虑最强叠加散射强度值, 忽略与其散射强度相近的其余亮点对该区域的影响, 将使亮点位置在纵向出现较大偏差, 亮点模型结果不合理。面元的排列不规则同样影响Benchmark模型亮点分布的起伏情况。而中心亮点左右的2个亮点则出现了明显的残缺情况, 亮点中心十分贴近区域边界, 因此有必要将中心区域两边的 2个区域与中心区域进行合并。由于中心区域本身的散射强度与其余区域相比明显更强, 因此将中心区域扩大符合实际的情况。
对聚类算法进行优化后进行仿真计算得到如图7所示的Benchmark亮点分布。可以看出亮点基本呈现直线分布于艇身的中轴线上, 艇身亮点也大部分呈相对完整的圆形。由表1可以看出亮点中心的位置偏离中轴线较小, 可以看作呈直线排列, 符合板块元的理论和实际情况。并且相比传统的亮点模型, 亮点数目增加, 中近程态势下的潜艇目标的亮点分布情况反映得更为充分。

图7 聚类算法优化后Benchmark亮点分布Fig. 7 Highlight distribution of Benchmark after clustering algorithm optimization
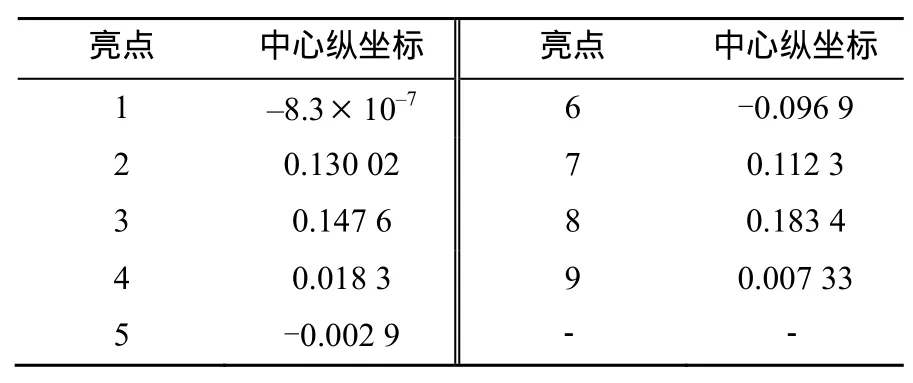
表1 艇身亮点纵坐标Table 1 Ordinate of submarine body highlight
传统的几何划分法得出的亮点模型其基本形式如图8所示[9], 其分布为1D分布, 无法描述潜艇目标在空间上的立体分布情况。而文中得出的亮点模型则将舰桥与艇身进行分离研究, 亮点模型为 2D分布, 潜艇目标在纵向的尺度得到更为准确的描述。

图8 几何划分法亮点模型分布图Fig. 8 Distribution schematic of highlight model with geometric partitioning
4 结束语
文中基于板块元的基本理论, 以k-means聚类算法的思想为理论基础, 提出了一种Benchmark亮点聚类优化算法, 建立了正横态势下 Benchmark亮点模型。文中给出了聚类优化算法的主要步骤和仿真流程, 对初步聚类算法得出的仿真结果进行分析, 研究面元划分对仿真结果的影响, 得出结论: 面元划分结果对亮点模型的上下起伏影响较大, 网格划分的精细化程度越高, 得出的亮点在纵向的稳定性越强。根据分析得出的结论, 考虑采用二次划分的方法以减弱面元排列不规则对仿真结果的影响, 并对聚类算法进行补充和优化。最后得出Benchmark亮点模型, 由图7可以看出, 艇身亮点近似呈直线排列在中轴线上, 纵轴方向的起伏小于艇身纵向尺寸的 5%, 基本符合实际情况下潜艇目标的声学散射特性。
[1] 周德善. 鱼雷自导技术[M]. 北京: 国防工业出版社,2009.
[2] 范军, 汤渭霖. 声纳目标强度(TS)计算的板块元方法[J].声学技术, 1999, 18(2): 31-32.
[3] 刘成元, 张明敏, 程广利, 等. 一种改进的板块元目标回声计算方法[J]. 海军工程大学学报, 2008, 20 (1): 25-27.Liu Cheng-yuan, Zhang Ming-min, Cheng Guang-li. Improved Planar Element Method for Computing Target Echo[J]. Journal of Naval University of Engineering,2008, 20 (1): 25-27.
[4] Dave R N. Characterization and Detection of Noise in Clustering[J]. Pattern Recognition Letters, 1991, 12(11):657-664.
[5] 郭军华. 数据挖掘中聚类分析的研究[D]. 武汉: 武汉理工大学, 2003.
[6] E.Л.沈杰罗夫. 水声学波动问题[M]. 何祚鏞, 译. 北京: 国防工业出版社, 1983.
[7] 范军, 汤渭霖, 卓琳凯. 声纳目标回声特性预报的板块元方法[J]. 船舶力学, 2012, 16(z1): 171-180.Fan Jun, Tang Wei-lin, Zhuo Lin-kai. Planar Elements Method for Forecasting the Echo Characteristics from Sonar Targets[J]. Journal of Ship Mechanics, 2012, 16(z1):171-180.
[8] 陈新泉. 聚类算法中的优化方法应用[M]. 成都: 电子科技大学出版社, 2014.
[9] 董仲臣, 李亚安, 陈晓. 一种基于亮点模型的潜艇回波仿真方法[J]. 计算机仿真, 2013, 30(6): 38-41.Dong Zhong-chen, Li Ya-an, Chen Xiao. Submarine Echo Simulation Method Based on Highlight Model[J]. Computer Simulation, 2013, 30(6): 38-41.
Optimized Benchmark Highlight Clustering Algorithm Based on Planar Element Method
CHEN Yuan1,2, HAO Bao-an1, WAN Ya-min1, YANG Fu-zhou1, LÜ Wei1, FAN Ruo-nan1
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710077, China; 2. Science and Technology on Underwater Information and Control Laboratory, Xi′an 710077, China)
Aiming at the problem that the available highlight model of submarine target in torpedo homing simulation is not exquisite enough, the fundamental principle of planar element model and the main idea of k-means clustering algorithm are employed to propose optimized Benchmark highlight clustering algorithm. First, a more exquisite highlight model of submarine target was built for torpedo homing simulation. A three-dimensional Benchmark submarine model was divided into planar elements, and the acoustic potential functions of each element were computed. Then, the elements were disposed by using the primary clustering algorithm, and a Benchmark highlight model was built. At last, the influence of division quality of the elements on the result of simulation was analyzed and the secondary division method was discussed to optimize the algorithm. Simulation indicated that the highlight model of Benchmark based on the proposed clustering algorithm is more exquisite with longitudinal stability compared with the available method. This research may provide the reference for target recognition of a torpedo.
torpedo homing; planar element method; clustering algorithm; Benchmark; highlight model
TJ630.34; TB115.2
A
2096-3920(2017)05-0432-04
10.11993/j.issn.2096-3920.2017.05.000
陈原, 郝保安, 万亚民, 等. 基于板块元法的 Benchmark亮点聚类优化算法[J]. 水下无人系统学报, 2017, 25(5):432-436.
2017-06-08;
2017-07-24.
陈 原(1993-), 男, 在读硕士, 研究方向为鱼雷自导仿真技术.
(责任编辑: 许 妍)
