微细光缆在水下航行器中的应用及关键技术综述
2018-01-03汤伟江朱云周张喜顺
高 卓, 汤伟江, 朱云周, 张喜顺
(1. 中国船舶重工集团公司 第 705研究所, 陕西 西安, 710077; 2. 水下信息与控制重点实验室, 陕西 西安,710077; 3. 海军装备研究院, 北京, 100161)
微细光缆在水下航行器中的应用及关键技术综述
高 卓1,2, 汤伟江1,2, 朱云周1, 张喜顺3
(1. 中国船舶重工集团公司 第 705研究所, 陕西 西安, 710077; 2. 水下信息与控制重点实验室, 陕西 西安,710077; 3. 海军装备研究院, 北京, 100161)
微细光缆具有重量轻、成本低的优点, 可以实现水下航行器的远程遥控、航行状态监测及视频数据等大容量信息的远程传输, 在鱼雷、潜空弹、无人水下航行器及水下光纤组网等水下装备领域被广泛应用。文中详细介绍了微细光缆在不同水下航行器上的最新研究成果, 并结合其应用特点, 分析总结了微细光缆研制中所需解决的关键技术: 光缆制造技术、线团绕制技术、线团布放动态损耗控制及光纤传输技术等, 并提出了具体解决途径, 可为水下航行器远程高速通信的进一步发展提供参考。
水下航行器; 微细光缆; 信息传输; 线团绕制; 损耗控制
0 引言
海洋占地球表面积的 71%以上, 蕴藏着丰富的资源, 在国家安全、利益和发展中的地位日益重要。安全可靠的水下通信技术是海洋装备应用必不可少的基础, 目前可用的水下通信方式主要包括:水下电磁波通信、水下声通信、水下无线光通信及水下有线光纤通信。其中电磁波在海水中衰减非常快(空中无线通信技术常采用的2.4 GHz信号在海水中的衰减约为1 695 dB/m, 仅能通信10 cm左右)[1], 超长波、极长波无线通信技术需要装备庞大的天线系统, 且通信深度局限于浅海区域[2];水声技术是目前最成熟的水下通信技术, 传播距离较远, 但受水声信道影响, 通信延迟较大, 且在浅水区域存在复杂的时变和空变特征, 带宽很难超过50 kHz, 多数情况下通信速率在1 kbps附近[3]; 蓝绿激光在海水中的衰减值小于10-2dB/m,对海水穿透能力强, 能达到数米到数十米的通信距离, 水下激光通信需要直线对准传输, 通信距离较短, 水的清澈度会影响通信质量, 适合近距离高速率的数据传输[4]。光纤通信具有传输距离远、信息传输速率高、体积小、重量轻、可靠性高及抗干扰能力强等特点, 采用经过增强和防护处理的微细光缆实现水下航行器的远程大容量数据传输, 具有其他通信方式无法比拟的优势: 1)体积小, 重量轻[5], 适合水下航行器携带, 微细光缆的直径细, 每千米的重量可以控制在 150 g之内, 降低了水下航行器携带大长度微细光缆的体积和重量要求; 2) 传输速率高、传输距离远,数据传输速率可以达到1 Gbps以上、传输距离可以达到百千米以上[6], 为水下各种传感信息、视频、多用户应用信息等数据传输提供了技术途径;3) 环境适应性好, 经过特殊成缆处理的微细光缆在使用中不受海水腐蚀影响, 通信能力不受水文条件和复杂的海水环境影响, 可以实现全海深应用; 4) 在水下航行器上应用范围广, 由微细光缆绕制成型的线团可适用于不同航行器携带, 不受航行器航行速度和深度限制, 满足航行器多种工况下的使用。微细光缆以其明显的技术优势被广泛应用于水下航行器领域[7]。
1 微细光缆在水下装备中的应用
1.1 在鱼雷中的应用
世界鱼雷中, 线导鱼雷约占60%[8]。光纤传输技术的发展为鱼雷的远程线导技术开辟了更为广阔的前景。微细光缆可对发射舰艇向鱼雷发出的操作控制指令以及鱼雷反馈给发射舰艇的各运动参数(如雷位、航速、航向、航深、自导参数及目标噪声等)进行双向传输, 且不受海水环境和舰艇电磁环境的干扰, 从而增加鱼雷的作战距离,增强鱼雷的目标识别能力, 利于控制鱼雷机动灵活地导向目标, 极大地提高了鱼雷的通信速率和可靠性。
21世纪初, 德国、瑞典、意大利和法国等国家的光纤制导鱼雷相继装备部队。这些鱼雷的声自导头搜索范围大, 可以任选主动、被动或主/被动 3种方式搜索目标, 与光纤制导技术的结合不仅增大了鱼雷的有效射程, 同时增强了鱼雷的反对抗能力, 保证了极高的命中率。图 1为德国DM2A4鱼雷构成图[9]。

图1 德国DM2A4鱼雷构成图Fig. 1 Structure of Germany torpedo DM2A4
应用于鱼雷上的微细光缆, 在设计上包括 2个微细光缆线团, 分别位于鱼雷和发射平台。鱼雷上线团的长度基本与鱼雷的航程一致, 同时需要满足鱼雷高航速下快速布放的要求; 平台上线团的长度与在鱼雷攻击过程中平台机动距离相关,在布放时需采用必要的保护措施, 防止布放出去的微细光缆受平台机动影响造成断线。
如何在鱼雷有限的体积和重量条件下携带满足鱼雷航程需求的微细光缆, 以及如何使微细光缆的布放速度适应鱼雷的整个航速范围是光纤制导鱼雷所需解决的关键问题。针对这些问题,就需要微细光缆具有直径细、强度高和无接续长度大的特点, 同时线团设计时需要考虑大变速条件下的可靠低损耗布放。
随着重型鱼雷的不断发展, 光纤制导技术将向着更远通信距离、更高布放速度方向发展。
1.2 在潜射防空弹上的应用
自20世纪90年代末以来, 欧洲国家—直致力于光纤制导潜射防空导弹的研制工作, 先后研制出“独眼巨人”(Polyphem-SM)、潜射交互式防御和攻击系统(interactive defence and armament for submarines, IDAS)潜射光纤导弹等[10]。
“独眼巨人”是一种水下发射、光纤制导的潜空导弹武器系统。导弹头部装有电视或红外摄像机, 尾部安装光纤放线轴, 在导弹飞行中放出光纤。作战时潜艇通过声呐系统探测到反潜直升机旋翼或反潜巡逻机螺旋桨发出的声音, 或机载吊放式有源声呐发出的探测信号, 来确定目标的方位和距离。“独眼巨人”导弹的发射过程为: 先通过鱼雷发射筒发射导弹水下运载器, 运载器被发射后, 在水下以 15 m/s的速度向预定方向航行,此时导弹相当于光纤连接的线导鱼雷; 在离开潜艇约1 km后, 转入导弹发射的第2阶段, 在出水传感器的控制下, 导弹运载器一出水就沿轴“一分两半”, 导弹助推器和主发动机先后点火, 导弹飞出水面; 出水后, 导弹导引头把它“观察”到的图像通过光纤传送给水下潜艇, 潜艇内的导弹操作手根据传回的图像, 向导弹发送控制信号,控制导弹跟踪、拦截并最终摧毁目标。“独眼巨人”所使用的光纤外径0.24 mm, 抗拉力强度为40 N,可在5级海况下工作[11]。光纤传输容量包括1个视频通道和32个数据通道。
IDAS潜射光纤导弹射程 15 km, 速度大于200 m/s, 单个重型鱼雷发射舱可存放多达4枚该型导弹。IDAS在飞行过程中通过光纤链控制, 采用 2个线轴释放光纤, 即 1个线轴在导弹上, 另一个线轴在发射设备上。由于导弹从水下发射,水介质对放线的影响比空气影响大, IDAS采用了独特的四线轴放线: 在水下约深10 m[12]处IDSA释放出 1个“补偿浮标”, “补偿浮标”上携带有2个线轴, 加上导弹和潜艇上的2个线轴一起完成光纤放线, 增加的 2个线轴用来对光纤在海水中的波动和漂移进行补偿, 以防止断线[13]。具体过程参见图2。

图 2 潜射交互式防御和攻击系统(IDAS)光纤制导多用途导弹作战过程示意图Fig. 2 Schematic of operation process of submarine launched fiber optic guided multipurpose missile with interactive defense and armament for submarines(IDAS)
1.3 在无人水下航行器上的应用
无人水下航行器(unmanned undersea vehicle,UUV)一般分遥控水下航行器(remotely operated vehicle, ROV)和自主式水下航行器(autonomous undersea vehicle, AUV)2种。ROV作业需要母船的支持, 母船通过脐带缆对ROV供电并与 ROV双向通信, 实现母船对 ROV的遥控操作以及ROV的探测信息回传。为配合 ROV作业, 母船上配备有绞车系统, 对于大潜深 ROV, 一般需配备中继站。ROV随中继站由母船上的绞车系统和吊放装置布放至设定深度, 并通过中继站上的脐带缆管理系统实现供电、通信和脐带缆收放。由于ROV的运动和工作区域受脐带缆的限制, 且需配备复杂大型的母船支持系统及昂贵的铠装缆和脐带缆系统, 造成其使用和维修的不便[7]。AUV自带电池供电, 在设定区域自主航行进行海洋探测, 由于采用无缆工作模式, 无法与母船进行信息交互,不能实现精确探索, 且不具备作业能力[14]。复合型水下航行器(autonomous remotely operated vehicle,ARV), 综合ROV和AUV的优点, 采用微细光缆替代脐带缆, 自带电池供电, 既具备 AUV 大范围海洋探测功能, 又可由母船实施遥控操作并能将探测信息实时回传至母船。ARV的出现可使水下航行器向着更大潜深、更远距离和更具智能化的方向发展,代表了未来UUV的发展趋势[15]。
1) 美国
美国伍兹霍尔海洋学研究所(Woods Hole oceanographic institution, WHOI)研制的“海神号”混合式遥控水下航行器(hybrid remotely operated vehicle, HROV)采用微细光缆作为通信介质, 见图3。

图3 “海神号”混合式遥控水下航行器Fig. 3 Hybrid remotely operated vehicle(HROV) Nereus

图4 “海神号”HROV工作过程Fig. 4 Working process of HROV Nereus
在HROV及其母船缓冲装置上分别装有20 km绕制成团的微细光缆, 工作时母船通过吊放装置用铠装缆将缓冲装置和 HROV吊放至设定水深,HROV与缓冲装置分离, 在HROV下潜和水下机动作业时, 微细光缆分别从HROV和缓冲装置线团上布放出, 以构建 HROV与母船间的光纤通信信道:将 HROV的探测信息实时上传至母船, 母船同时根据需要对HROV进行遥控操作, 见图4。
“海神号”HROV微细光缆有2种: 一种直径0.8 mm, 工作强度为133 N, 断裂强度为400 N,水中重量为0.385 kg/km; 另一种直径为0.25 mm,即在光纤上增加一层缓冲层, 工作强度为8 N, 断裂强度108 N, 水中重量为0.016 kg/km[16]。为减小微细光缆布出后因接触海底而产生的不可预期的断线风险, 通过在布放系统中增加张力制动器来提高布放张力, 延迟微细光缆接触海底的时间,从而延长“海神号”水下的正常工作周期。
“海神号”HROV微细光缆布放系统从功能验证到实航验证已开展了多项试验: 2004年, 利用升降机将线团吊至海底, 验证深海下线团被动布放性能, 结合仿真结果确定了微细光缆优选0.25 mm带缓冲层的光纤; 2005年, 以 ABE(autonomous benthic explorer)航行器为载体, 潜深约2 000 m, 进行5次试验, 验证了航行器上搭载微细光缆线团的布放性能; 2006年, 通过4次航行器潜航试验验证整个布放系统, 即缓冲装置和HROV线团两端布放的性能[17]; 2007年, 正式搭载“海神号”进行4次试验[16], 潜深达到2 270 m,工作时间接近 5 h, 两端线团的布放长度均超过了1 km, 考核验证了“海神号”微细光缆布放系统的性能和可靠性; 2009年5月31日, “海神号”在马里亚纳海沟下潜至10 902 m水深[18], 完成了对马里亚纳海沟的探索和挑战。
在“海神号”研究的基础上, 自 2011 年起,针对极地海冰调查, WHOI开始研制新型水下航行器HROV即Nereid UI, 见图5。该航行器最大工作水深2 000 m, 携带20 km的微细光缆[14], 并搭载多种生物、化学传感器, 可进行大范围的冰下观测和取样等作业。此外, 美国小型水下航行器 Flying Plug(飞行插塞)主要用于海底观测系统或水下监测网的数据提取[19], 见图6。

图5 新型HROV-Nereid UIFig. 5 New type HROV-Nereid UI

图6 “飞行插塞”工作模式图Fig. 6 Working pattern of Flying Plug
“飞行插塞”采用微细光缆实现与母船信息互联, 与水下对接站对接后, 将基站的监测数据高速传回给母船。“飞行插塞”设计工作深度为300 m, 航行速度可达到2.5~3.5 kn, 2个微细光缆线团, 1个安装于水下航行器, 长度1.5 km, 1个安装在母船上, 长度为 20 km, 光缆均沿线团轴向布放, 水下航行器上微细光缆沿其侧后方的柔性管布放出。
2) 日本
日本已研制过多型遥控水下航行器(undersea remotely operated vehicle, UROV)系列水下航行器, UROV7K是其中最典型的UUV[20](见图7)。

图7 日本UROV7KFig. 7 Japanese UROV7K
UROV7K采用直径不大于1 mm的微细光缆,断裂强度约49 N, 布放系统采用3个线团[21], 其1个安装在母船上, 另2个安装在水下航行器上,以串联方式连接。每个线团携带10 km微细光缆,采用特殊设计使光缆沿线团轴向布出, 静态释放力约为0.098 N。为避免光缆过多布出, 采用制动装置来调整光缆的布放力。由于微细光缆较小的阻力, UROV7K可操控巡航距离超过30 km。在其布放系统的设计时充分考虑了水压、布放张力及弯曲对光纤信道损耗的影响, 以保证航行器工作过程中与母船的可靠通信。UROV7K微细光缆布放系统于1998年进行了4次潜航试验, 工作时间超过了2 h, 最大潜深达到2111 m。
3) 中国
中国船舶科学研究中心研制的小型“海筝”ARV样机, 以微细光缆为传输介质进行宽带宽、低损耗、长距离及高速率的信息传输, 可通过微细光缆操控 ARV对水下目标进行近距离的精细观察、拍摄和取样, 微细光缆直径为3 mm, 拉断力达到200 kg[22]。在此基础上, 中国船舶科学研究中心完成“海筝II型”ARV的研制, 见图8。该ARV最大工作深度300 m, 最大航速3 kn, 工作时间6 h, 续航里程达10 km[23]。

图8 “海筝”II型复合型水下航行器Fig. 8 Autonomous remotely vehicle(ARV) Sea Kite-II
中国科学院沈阳自动化研究所研制的“海斗号”自主遥控水下航行器采用特种微细光缆与母船进行实时双向信息交互(见图9), 整个布放系统配置有2个线团(见图10), 1个安装在“海斗号”上, 1个安装于母船, 光缆长度超过38 km, 采用轴向内放线方式, 从线团内腔抽出, 并随“海斗号”机动航行时布放。线团由微细光缆分层双向紧密缠绕而成, 采用特殊成型工艺, 严格控制线团内应力和布放张力, 以提高航行过程中微细光缆的布放可靠性。2015年,“海斗号”完成了浅海试验及 3 000米级深海试验, 其最大下潜深度为 2 784 m, 工作时间 74 min[14]。2017年 3月, “海斗号”完成了深海遥控和视频影像传输试验, 工作时间接近10 h, 通过微细光缆实现万米海底的巡航遥控和实时视频影像传输。
UUV航速较低, 一般具有大潜深需求。在全海深条件下要保证其与母船之间的可靠通信, 需考虑成团后的微细光缆在大变深条件下的损耗控制问题, 且微细光缆自身需在高耐压环境下可靠使用。
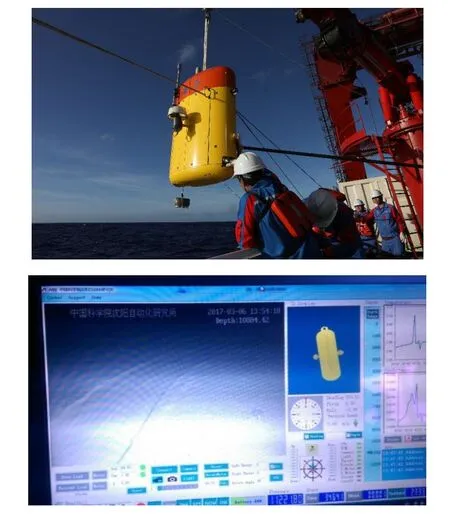
图9 “海斗号”复合型水下航行器Fig. 9 ARV Hadal

图10 “海斗号”微细光缆线团Fig. 10 Fiber optic micro-cable clew of ARV Hadal
1.4 水下光纤组网应用
微细光缆绕制成为线团后, 可以采用多种途径进行布放, 为水下临时局域信息网的构建提供实现途径。通过布放微细光缆, 为布置在水中的通信与探测节点提供光纤连接, 构建水下局域光纤网络, 从而实现在无法预先设置水下网络的水域快速建立临时的通信与监测系统, 见图11。
美国海洋国际公司正在开展战术海底网络架构项目, 当正常的通信链路被破坏时使用光纤和浮标建立应急通信系统。该网络可在战术网络不可用的情况下提供备份连接, 旨在开发和演示一种创新性的、基于光纤技术的网络构建方法, 在战场环境下用水下光纤线路临时性替代无线电射频战术数据网络。正在开发的微细光缆具有直径小、强度高、中性浮力、耐海水压力和较好的环境适应性等特点, 可在复杂海洋环境中正常工作30天, 这一时间足以重建主要通信手段[24]。

图11 临时性水下光纤通信网Fig. 11 Temporary undersea optical fiber communication network
2 微细光缆在水下应用中的关键技术
2.1 高强耐环境微细光缆制造技术
微细光缆是水下光纤有线通信的介质, 是水下航行器与母船可靠通信的保证。微细光缆的性能将直接决定整个布放系统的性能。微细光缆一般由光纤、加强层和外护层组成, 加强层用于保护光纤并为微细光缆提供一定的强度, 外护层则可提高微细光缆的表面质量与线径均匀性, 见图12。

图12 微细光缆结构示意图Fig. 12 Structure schematic of fiber optic micro-cable
微细光缆各部分的选型对于其性能至关重要。一般来说, 微细光缆应选择弯曲性能较好的光纤。光纤的弯曲损耗是波导结构引起损耗的一种, 从根本上是光不满足全内反射条件造成的。光纤的弯曲损耗包括宏弯损耗和微弯损耗2种。
1) 宏弯损耗
宏弯损耗与光纤结构、光纤中传输光的波长及弯曲半径共同决定。将单模光纤看作是纤芯,即无限包层的结构, 则宏弯损耗[25-26]

2) 微弯损耗
微观弯曲指光纤在正常位置附近以微小偏移做随机振荡。微观弯曲主要是由在制造和缠绕过程中应变以及温度变化引起的光缆材料尺寸变化引起的。且微弯损耗[27]

式中: N为随机微弯的个数; h为微弯凸起的高度; a为纤芯半径; b为包层半径; Δ为纤芯包层相对折射率差; E为包层杨氏模量;fE 为光纤的杨氏模量。
光纤的截止波长受弯曲直径和光纤长度的影响, 即

式中:2cλ和1cλ分别是在弯曲直径2D和长度2L与弯曲直径1D和长度1L时的截止波长; C和S分别为长度、弯曲相关常数。
由式(3)可看出, 弯曲半径越小, 截止波长越小, 且单模光纤弯曲(包括宏弯和微弯)灵敏度中

式中, 模场直径(mode field diameter, MFD)越小,MAC值越小, 对弯曲损耗越有利。可以看出, 截止波长大而模场直径小的光纤更耐弯曲。
目前高性能弯曲不敏感光纤主要依靠减小模场直径来实现, 而减小模场直径会导致光纤的衰减常数增大, 并降低光纤链路的传输距离, 且这种光纤相较于普通光纤成本大幅增加, 在水下航行器光纤通信系统设计时, 需根据传输距离和弯曲性能要求综合考虑选择光纤。
加强层材料的选择主要根据微细光缆抗拉强度确定加强层的弹性模量, 由于外护层较薄, 可忽略外护层对微细光缆抗拉强度的影响, 并兼顾考虑微细光缆的扭转刚度和弯曲刚度性能。可按下式选择加强层材料

式中: F为微细光缆承受的力; ε为与F对应微细光缆的应变;gE为光纤的弹性模量;gA为光纤的截面积;zA为加强层的截面积。
外护层材料需根据加强层材料和粘接剂材料确定, 既要与加强层紧密粘合, 又能与粘接剂有良好的粘接性能。加强层与外护层材料的选择还需要考虑在海水恶劣环境下的使用性能, 且需致密, 在大水压下水不能渗入光缆使光纤腐蚀产生氢损。
2.2 低应力线团绕制技术
微细光缆线团是由2个端板、壳体和光缆线包组成[28], 见图13。
2个端板和壳体组成线团容器, 光缆线包在两端板之间, 线包内部为圆形空腔, 光缆从内腔沿线团轴线布放。线团用专用缠绕设备将微细光缆分层双向紧密缠绕在绕线轴上, 安装壳体并卸除绕线轴和轴套后使用。
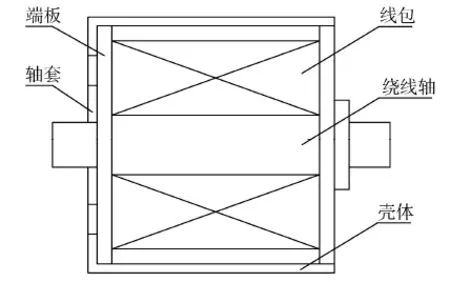
图13 微细光缆线团组成示意图Fig. 13 Schematic of fiber optic micro-cable clew component structure
微细光缆缠绕时需要施加一定的张力, 缠绕张力是微细光缆线团紧密缠绕的保证, 而张力的存在会使内层光缆承受径向挤压力, 且由于端板的限制, 会使光缆承受沿线团轴向的挤压力。2个方向挤压力会改变光缆沿自身轴线方向的变形[29], 即

式中: Δri,n为第n层缠绕时第i层光缆的径向变形; Δxi,n为第n层缠绕时第i层光缆沿线包的轴向变形; dFNri,n、dFNxi,n和ΔNxi,n为光缆上的受力;Er为光缆的径向弹性模量; Wr为光缆的径向弹性系数。
光缆径向变形使各层光缆产生径向变形, 使其沿光缆的轴向长度减小, 从而改变光缆中光纤的应变, 即

式中:,zinFΔ为第n层缠绕时第i层光缆的张力减小量;xE为光缆的轴向弹性模量;xA为光缆截面积;iR为第i层光缆的半径;,inRΔ为半径减小量, 与该层和以下各层光缆的径向变形量相关。
对于定张力缠绕方式, 光纤随缠绕层数呈类抛物线变化趋势。光纤应力的存在会影响线团的传输性能, 降低线团的贮存、使用寿命。由实测结果可以看出(见图14), 在线团内层和外层光纤应力较大, 而中间层应力较小。图中, 横坐标代表光缆线团长度, 纵坐标为线团中微细光缆应变与缠绕张力施加在微细光缆上产生的应变的比值。为减小线团内、外层光纤应力, 可采用变张力缠绕方式, 在内层缠绕和外层缠绕时适当减小张力, 能够有效降低线团内、外层应力。同时每层光缆在缠绕时应避免排线过程施加沿线团轴向的挤压力, 并在线团成型后采用特殊处理工艺改变线团应力分布状态, 降低线团整体应力。

图14 微细光缆线团应变分布曲线Fig. 14 Strain distribution curve of fiber optic microcable clew
2.3 线团布放动态损耗控制技术
微细光缆全程可靠布放是水下航行器光纤通信的关键问题, 布放过程中光缆从线包上带扭剥离、从放线通道释放时承受的拉力及布放弯曲状态均会增大线团的传输损耗, 且该损耗会随剥离角和布放力的变化而动态改变, 将线团布放损耗控制在一定范围以保证光纤信道传输的可靠性是水下光缆布放技术的难点。
线团缠绕时应在微细光缆层间、匝间涂抹粘接剂, 将各层、各匝微细光缆粘接成一体, 提高卸除芯轴后光缆线包的整体性。采用特殊粘接剂涂抹方法, 以涂抹均匀性为目标, 可保证微细光缆逐匝逐层顺次从线包内腔剥离。剥离角是在剥离点处已布出光缆微元与未布出光缆圆切线的空间夹角, 与布放速度、粘接力及布放位置相关。剥离角较小时, 微细光缆呈现小弯曲状态, 会增大光纤信道的传输损耗, 甚至会造成断线。在布放速度设定的条件下, 可通过调整粘接力来控制剥离角。粘接力越大, 剥离角较小, 且粘接力还影响光缆的布放力值。粘接力调整需要综合考虑不同位置、不同速度状态下光缆的布放状态, 可采用分层变粘接力控制方法, 将剥离角控制在一定范围内, 有效限制因剥离角产生的附加损耗。
微细光缆的布放张力与布放速度、粘接力、放线通道形式相关。粘接力设置过大, 会造成剥离角的减小而引起损耗的增加, 粘接力一般远小于布放张力。在水下航行器设计时, 设计放线通道将微细光缆的布放点设置在航行器流场影响区以外, 微细光缆经过放线通道后布入水中, 放线通道的构型也会影响光缆的损耗, 一般通过对放线通道进行大圆角过渡设计, 降低放线通道对布放附加损耗的影响。
2.4 大海深线团承压低损耗控制技术
对于大深度水下航行器而言, 要实现与母船的可靠通信, 除仍需微细光缆安全可靠布放外,还要求线团在大耐压条件下能将水压引起的传输信道损耗控制在一定范围内, 使光纤信道总的传输损耗低于通信系统最大允许传输损耗。
光缆线团缠绕时应施加一定的张力, 光缆线包层间、匝间致密且填充有粘接剂, 光缆线团在水下使用时, 水很难进入线包内部。两侧端板通过粘接剂与光缆线包两侧面粘接成一个整体, 水也很难渗入光缆线包与端板的接合面。光纤线团内腔中空, 两侧端板与壳体连接成整体, 在水压作用下, 由于端板未形成均压, 使端板内圆处向线包侧变形, 对光缆线包施加挤压力, 导致线包内部光缆应力增大, 光纤信道损耗增加, 甚至造成通信中断。具体的解决措施为: 增大光缆线包接触水的面积, 使线包两侧面能尽可能多的接触水, 并改善粘接剂材料和用量, 使光缆线团在大水压条件下, 水能渗入至线包内部, 降低水压形成的附加损耗, 同时优化线团设计的重点是两侧端板的设计, 需选择合适的端板材料, 减小线包轴向变形增大时因两侧端板限制而产生的挤压力。
优化后线团的耐水压传输性能主要依靠微细光缆自身保证, 然而当光纤与加强层同轴度不好时, 水压下对光缆周向的挤压力会使光纤产生微观弯曲, 同样会增大光纤信道的损耗, 因此, 对于深海使用条件, 需进一步提高微细光缆的制造精度。
2.5 远程无中继数据融合光纤传输技术
随着水下航行器动力技术的提升以及信息感知途径的增加, 对水下光纤通信距离和速率的要求日益增加。电信通信领域可以在传输过程中通过电中继或光中继提升通信距离, 但是在水下光纤通信中, 光缆处于实时动态释放之中, 光缆为整根缠绕组成, 不易添加中继节点, 因此通常采用长距离的无中继通信。光纤通信中影响光纤通信距离的主要参数为传输损耗和光纤色散。
光纤传输损耗主要由吸收损耗、散射损耗和弯曲损耗组成, 吸收损耗是由制造光纤材料本身以及其中的过渡金属离子和氢氧根离子等杂质对光的吸收而产生的损耗; 散射损耗是由于光纤介质不均匀, 传输光以光能的形式把能量辐射出光纤之外的一种损耗; 弯曲损耗是由于光纤的弯曲,造成模式转换, 增加传输损耗。由于水下航行器用微细光缆未释放前为紧密缠绕的线团, 其弯曲损耗更为严重。衡量光纤损耗特性, 采用损耗系数α表示, 即传输单位长度光纤所引起的光功率减小的分贝数, 数学表达式[30]

式中: α为损耗系数; L为光纤长度;1P和2P分别为光纤的输入和输出光功率。
当只考虑光纤损耗时, 可知

式中: Imax为无中继光纤通信的最大距离;PTmax为光发射机最大平均发射光功率; Pr为光接收机接收灵敏度。
光纤色散是影响无中继传输距离的另一个重要因素, 不同波长或者不同模式的光由于传输速度不同, 经光纤传输到达接收端的传输时间不同, 导致光信号以不同光频率成分或不同模式先后到达接收端, 产生波形失真。光纤的色散主要分为模式色散、材料色散、波导色散和极化色散,远距离传输一般采用单模光纤, 不存在模式色散,极化色散很小, 一般忽略不计, 因此对于单模光纤, 光纤的总色散

式中:mτ为材料色散,Wτ为波导色散。
表征色散大小采用色散系数, 定义为单位线宽光源在单位长度光纤上所引起的时延差

式中: D(λ)为材料色散和波导色散的色散系数;τ( λ)为光纤的群延迟。
对于单模光纤, 通信带宽

式中: B为通信带宽; λΔ为光源的谱线宽度。
从上式可以看出, 无中继光纤通信系统的带宽和距离成反比关系。
影响水下无中继光纤通信距离和速率的主要因素为传输损耗和光纤色散, 且通信距离和通信速率成反比关系。目前主要通过提高发射机发射光功率, 使用高灵敏度的光接收机提升传输距离, 后续使用光纤放大器进行性能提升也是目前的研究热点。
随着水下航行器功能的日益强大, 携带的传感器数量和种类大幅增加, 特别是由于保密和小型化的要求, 越来越多水下航行器将原始传感器数据通过微细光缆直接传输, 由发射平台进行解算和处理, 再将操控信息回传至水下航行器, 从而进一步提高了对光纤通信系统传输带宽和接口种类的要求。水下航行器携带的传感器种类众多:视频传感器、姿态传感器、深度传感器及声学传感器等, 通过信源级别的数据融合、数据压缩和冗余处理, 结合多模式接口协议转换, 实现大容量多传感器数据的融合传输。水下航行器作业过程中, 微细光缆处于高速动态释放过程, 传输光功率会发生瞬间波动, 造成误码。水下微细光缆传输必须设计合适的纠错编码技术, 进行信道纠错和补偿, 减小传输过程错误概率, 提升传输效率。
3 结束语
微细光缆具有重量轻、成本低、水下传输距离远、通信速率高的优势, 能够实现全海域、各种速度下的水下远程高速通信, 在水下航行器等领域得到广泛应用。文中介绍了微细光缆在水下装备中的最新研究成果及发展方向, 分析了不同使用要求下需要解决的关键技术, 并提出了具体的解决途径。可为微细光缆在水下不同使用条件及环境下的应用提供参考。
不过, 由于微细光缆一般采用布放后不回收的使用方式, 超过一定航程通常一次性使用, 使其受到应用成本限制。此外, 为避免水下航行器本身机动对已布入水中的微细光缆可能造成的刮碰等损伤, 还需结合微细光缆在水中的布放性能,合理规划水下航行器的航行路径。
随着微细光缆制造工艺和光纤通信技术的提升, 低成本、远距离、大容量信息传输将为微细光缆的水下应用提供更为广阔的前景, 这也是下一步研究的重点。
[1] 魏巍, 陈楠楠, 张晓晖, 等. 用于水下传感器网络的无线光通信研究概况[J]. 传感器世界, 2011, 17(3): 6-12.Wei Wei, Chen Nan-nan, Zhang Xiao-hui, et al. Survey on Optical Wireless Communications for Underwater Sensor Networks[J]. Sensor World, 2011, 17(3): 6-12.
[2] 张建华, 孙卫华. 潜艇水下隐蔽通信技术研究[J]. 船舶电子工程, 2010, 30(2): 24-26.Zhang Jian-hua, Sun Wei-hua. Research on Underwater Covert Communication Technology for Submarines[J].Ship Electronnic Engineering, 2010, 30(2): 24-26.
[3] Catipovic J. Performance Limitations is Underwater Acoustic Telemetry[J]. IEEE Journal of Oceanic Engineering,1990, 15(3): 205-216.
[4] 王毅凡, 周密, 宋志慧. 水下无线通信技术研究进展[J].通信技术, 2014, 47(6): 589-594.Wang Yi-fan, Zhou Mi, Song Zhi-hui. Development of Underwater Wireless Communication Technology[J]. Communications Technology, 2014, 47(6): 589-594.
[5] 刘雪辰, 胡鹏, 赵岩. 鱼雷光纤线导光传输技术研究[J].鱼雷技术, 2013, 21(1): 34-38.Liu Xue-chen, Hu Peng, Zhao Yan. An Optical Transmission Technique for Fiber Wire-guided Torpedo[J]. Torpedo Technology, 2013, 21(1): 34-38.
[6] 张允洁. 光纤通信技术的应用与发展[J]. 舰船电子工程, 2013, 33(9): 18-21.Zhang Yun-jie. Application and Development of Optical Fiber Information Transmission[J]. Ship Electronic Engineering, 2013, 33(9): 18-21.
[7] 沈明学, 崔维成, 徐玉如, 等. 微细光缆的水下应用研究综述[J]. 船舶力学, 2008, 12(1): 146-156.Shen Ming-xue, Cui Wei-cheng, Xu Yu-ru, et al. Overview of Underwater Applications of Fiber Optical Micro Cable[J]. Journal of Ship Mechanics, 2008, 12(1): 146-156.
[8] 高继和. 线导鱼雷放线系统设计原理[M]. 北京: 国防工业出版社, 2008.
[9] 郝保安, 孙起, 杨云川, 等. 水下制导武器[M]. 北京:国防工业出版社, 2014.
[10] 林玉琛. 世界潜空导弹发展的现状[J]. 现代军事,2005(5): 38-41.
[11] 张晓强. 细看独眼巨人 欧洲光纤制导导弹时代来临[J].国际展望, 2004(13): 62-67.
[12] 林玉琛. 潜艇面临的威胁及潜空导弹[J]. 现代防御技术, 2005, 33(1): 19-27.Lin Yu-chen. Threats to Submarine and Submarine to Air Missiles[J]. Modern Defence Technology, 2005, 33(1):19-27.
[13] 钱东, 孙正杰. 新型孔潜攻防武器及其对反潜战的影响[J]. 鱼雷技术, 2008, 16(6): 1-9.Qian Dong, Sun Zheng-jie. Anti-submarine Warfare(ASW)Weapons and Sub-to-air Missile with Influences on Future ASW[J]. Torpedo Technology, 2008, 16(6): 1-9.
[14] 李一平, 李硕, 张艾群. 自主/遥控水下机器人研究现状[J]. 工程研究——跨学科视野中的工程, 2016, 8(2):217-222.Li Yi-ping, Li Shuo, Zhang Ai-qun. Research Status of Autonomous & Remotely Operated Vehicle[J]. Journal of Engineering Studies, 2016, 8(2): 217-222.
[15] 王磊, 刘涛, 杨申申, 等. 深海潜水器ARV关键技术[J].火力与指挥控制, 2010, 35(11): 6-8.Wang Lei, Liu Tao, Yang Shen-shen, et al. Key Techniques of Deep-sea Submersible ARV[J]. Fire Control &Command Control, 2010, 35(11): 6-8.
[16] Fletcher B, Young C, Buescher J, et al. Proof of Concept Demonstration of the Hybrid Remotely Operated Vehicle(HROV) Light Fiber Tether System[C]//IEEE Oceans Conference. Quebec, Canada: IEEE, 2008: 1-6.
[17] Young C, Fletcher B, Buescher J, et al. Field Tests of the Hybrid Remotely Operated Vehicle(HROV) Light Fiber Optic Tether[C]//IEEE Oceans Conference. Boston, MA,USA: IEEE, 2006: 1-6.
[18] Louis L, Whitcomb. Navigation and Control of the Nereus Hybrid Underwater Vehicle for Global Ocean Science to 11 000 m Depth: Preliminary Results[C]//IEEE International Conference on Robotics and Automation, Berlin Heidelberg: IEEE, 2010.
[19] Steve Cowen. Flying Plug: A Small UUV Designed for Submarine Data Connectivity[C]//Submarine Technology Symposium Symposium. Baltimore: SUBTECH, 1997.
[20] Aoki T, Murashima T, Tsukioka S, et al. Development of Deep Sea Free Swimming ROV "UROV7K"[C]//IEEE Oceans Conference. Seattle: IEEE, 1999: 1307-1311.
[21] Aoki T, Tsukioka S, Hattori M, et al. Development of Expendable Optical Fiber Cable ROV "UROV"[C]//IEEE Oceans Conference. Genoa: IEEE, 1992: 813-818.
[22] 徐鹏飞, 崔维成, 谢俊元, 等. 遥控自治水下机器人控制系统[J].中国造船, 2010, 51(4): 100-110.Xu Peng-fei, Cui Wei-cheng, Xie Jun-yuan, et al. Control System Design for Autonomous and Remotely-operated Vehicle[J]. Shipbuilding of China, 2010, 51(4): 100-110.
[23] 王瑶, 徐鹏飞, 胡震.“海筝II型”遥控自治水下机器人的运动控制研究[J]. 船舶电子工程, 2014, 34(3): 56-60.Wang Yao, Xu Peng-fei, Hu Zhen. Motion Control of"SeaKite-II" Autonomous and Remotely-operated Vehicle[J]. Ship Electronic Engineering, 2014, 34(3): 56-60.
[24] 张海燕, 丛键, 罗秋霞.水下战术网络和安全技术研究[J]. 通信技术, 2017, 50(5): 944-949.Zhang Hai-yan, Cong Jian, Luo Qiu-xia. Undersea Tactical Network and Security[J]. Communications Technology, 2017, 50(5): 944-949.
[25] Renner H. Bending Losses of Coated Single-mode Fibers:A Simple Approach[J]. Journal of Lightwave Technology,1992, 10(5): 544-551.
[26] Gerd Keiser. 光纤通信[M]. 北京: 电子工业出版社,2002.
[27] 薛梦驰. 光纤弯曲损耗的研究与测试[J]. 电信科学,2009, 25(7): 57-62.Xue Meng-chi. Research and Measurement of Optical Fibre Macrobend Loss[J]. Telecommunications Science,2009, 25(7): 57-62.
[28] 赵金才, 汤伟江, 孙铁绳. 有线通信浮标光纤线团受力分析及仿真[J]. 鱼雷技术, 2016, 24(5): 384-389.Zhao Jin-cai, Tang Wei-jiang, Sun Tie-sheng. Force Analysis and Simulation of Optical Fiber Clew for Wired Communication Buoy[J]. Torpedo Technology, 2016, 24(5):384-389.
[29] 汤伟江, 刘卫东, 陈刚, 等. 水下通信用光缆线包缠绕力学建模及仿真[J]. 西北工业大学学报, 2016, 34(6):996-1003.Tang Wei-jiang, Liu Wei-dong, Chen Gang, et al. Winding Mechanical Modeling and Simulation of Fiber Optic Cable Spool for Underwater Communication[J]. Journal of Northwestern Polytechnical University, 2016, 34(6):996-1003.
[30] 邓大鹏. 光纤通信原理[M]. 北京: 人民邮电出版社,2009.
Overview of Applications of Fiber Optic Micro-cable in Undersea Vehicle and Key Technologies
GAO Zhuo1,2, TANG Wei-jiang1,2, ZHU Yun-zhou1, ZHANG Xi-shun3
(1. The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710077, China; 2. Science and Technology on Underwater Information and Control Laboratory, Xi′an 710077, China; 3. Naval Armament Academy, Beijing 100161,China)
Fiber optic micro-cable has the advantages of light weight and low cost, and it can realize high-capacity and long-distance information transmission of remote control, navigational status, video, and so on between undersea vehicle and mother ship. It has extensive applications in torpedo, submarine-to-air missile, unmanned undersea vehicle, and underwater fiber optic network. This paper introduces the applications of fiber optic micro-cable to various types ofundersea vehicles, and analyzes the application-concerned key technologies, such as cable manufacturing technology,spool winding technology, wire releasing dynamic loss control and optical fiber transmission technology. In addition,specific solutions to these key technologies are offered. This study may provide a reference for development of undersea vehicle’s remote high-speed communication.
2017-09-30;
2017-11-01.
高 卓(1971-), 男, 硕士, 研究员, 主要研究方向为水下通信技术.
undersea vehicle; fiber optic micro-cable; information transmission; spool winding; loss control
高卓, 汤伟江, 朱云周, 等. 微细光缆在水下航行器中的应用及关键技术综述[J]. 水下无人系统学报, 2017,25(5): 385-395.
【编者按】随着海洋在国家安全、利益和发展中战略地位的日益重要, 各国海军均致力于用于深海探测、资源开发及水下作业等的海洋装备的研发, 安全可靠的水下通信技术已成为海洋装备应用必不可少的基础。光纤通信具有传输距离远、信息传输速率高、体积小、重量轻、可靠性高、抗干扰能力强、环境适应性好等特点, 是水下远程大容量通信的优选方案,微细光缆作为通信载体已被广泛应用于线导鱼雷、水下航行器、浮标等领域。中国船舶重工集团公司第705研究所所属研究团队,长期从事水下有线通信技术研究,先后研制出多型产品并得到成功应用。近年来,该团队重点开展深海用光纤布放及信息传输技术的研究,突破了全海深光纤有线通信关键技术,成功研制了全海深光纤传输系统,搭载“海斗号”,在马里亚纳海沟首次实现将万米海底的视频实时传输至水面,标志着我国水下光纤通信技术取得重大突破,技术性能达到世界领先水平。本刊特邀该团队技术负责人高卓研究员系统梳理了国内外微细光缆在水下装备应用中的研究现状及关键技术,通过详实的资料为广大读者呈现了该领域的最新发展成果和研究进展。
TJ630; U674.941; TN818
A
2096-3920(2017)05-0385-11
10.11993/j.issn.2096-3920.2017.05.001
(责任编辑: 杨力军)
