共轭凸轮引纬机构的凸轮轮廓线光顺与反求
2017-12-26苏宗帅季祖鹏顾萍萍浙江理工大学机械与自动控制学院浙江杭州310018
张 雷, 苏宗帅, 季祖鹏, 顾萍萍(浙江理工大学 机械与自动控制学院, 浙江 杭州 310018)
共轭凸轮引纬机构的凸轮轮廓线光顺与反求
张 雷, 苏宗帅, 季祖鹏, 顾萍萍
(浙江理工大学 机械与自动控制学院, 浙江 杭州 310018)
针对凸轮加工时依靠的测量数据存在误差及凸轮磨损后轮廓曲线损坏变形的情况,提出一种利用共轭凸轮主凸轮的有限测量点对其进行光顺处理和反求副凸轮的方法,并通过MatLab开发了共轭凸轮的光顺和反求软件。利用二阶连续可导的三次样条函数对测量的型值点拟合,得到具有一定曲率要求的凸轮廓线。通过共轭几何关系,进一步求解副凸轮轮廓线。借助UG智能点跟踪及运动仿真得到凸轮从动件的运动规律。为改善从动件运动规律,应用修正梯形加速度规律对从动件运动进行设计,用反转法和包络公式得到共轭凸轮轮廓。经验证,反求凸轮可满足引纬要求,为引纬机构凸轮设计提供参考。
引纬机构; 共轭凸轮; 光顺处理; 反求; 凸轮廓线
实际生产中,凸轮加工所需参数有时来源于对原始凸轮测量得到的型值点,测量产生的误差很可能导致机构的性能不能完全实现。凸轮在运转过程中的摩擦也会造成凸轮磨损,从而导致凸轮轮廓曲线损坏变形,尤其在高速凸轮机构中,凸轮轮廓的变化对机构特性影响比较敏感,造成加速度和输入力矩的增大。剑杆织机引纬和打纬共轭凸轮机构的优化以及改进设计直接影响剑杆织机性能,因此研究织机打纬和引纬机构对织机高速化具有重要意义[1]。
凸轮磨损修复常通过2种方法进行:光顺处理和凸轮反求。国内外很多学者对凸轮轮廓的光顺处理进行了研究,以减小测量误差及修复磨损后的凸轮轮廓。Angeles[2]提出采用样条函数设计凸轮轮廓。常用的加速度运动规律有纯三角函数分段组合、三角函数与直线组合、修正梯形加速度、修正正弦加速度组合等。文献[3]结合从动件规律,用偏离建立最小凸轮基准极径与曲率半径映射关系。唐浩等[4]在三次参数样条曲线拟合基础上采用了隔点插值的方式对凸轮升程线进行拟合,提高了凸轮精度,但不能保证拟合曲线经过所有型值点。光顺处理方法[5]主要有线性拟合、圆弧拟合、最小二乘多项式拟合以及三次样条拟合等。线性拟合和圆弧拟合较为简单,但不能保证型值点处一阶二阶导数连续。最小二乘多项式拟合曲线整体光滑,但难以确定合适的拟合次数,拟合次数较高则会出现龙格现象[6]。三次样条插值可以保证曲线一阶二阶导数连续,避免较大冲击载荷和龙格现象的出现。
凸轮反求一般利用反转法和包络线公式求解凸轮的实际轮廓线。林万焕等[7]利用Hermite多项式设计了打纬运动学方程,作为反求打纬共轭凸轮的已知量,但在行程最远端未考虑加速度为零。本文针对引纬机构共轭凸轮测绘型值点,通过三次Hermite插值,初步光顺,并针对引纬机构的剑杆交接处运动特性,提出了基于修正梯形加速度规律二次反求的算法对凸轮线轮廓反求。
1 凸轮光顺
1.1 型值点获取
建立如图1所示坐标系,以凸轮轴心为坐标原点O,选取测量得到的最小极径为x轴正方向,方向水平向右,(βi,ri)为主凸轮廓线型值点坐标,用三坐标测量机得到,β为型值点A的极角坐标,r为极径坐标,R为点A对应的理论轮廓线上的点A′到凸轮轴心的距离,d为滚子半径,γ为点A与点A′的连线与r的夹角,ζ为γ的余角,δ为R与r的夹角。
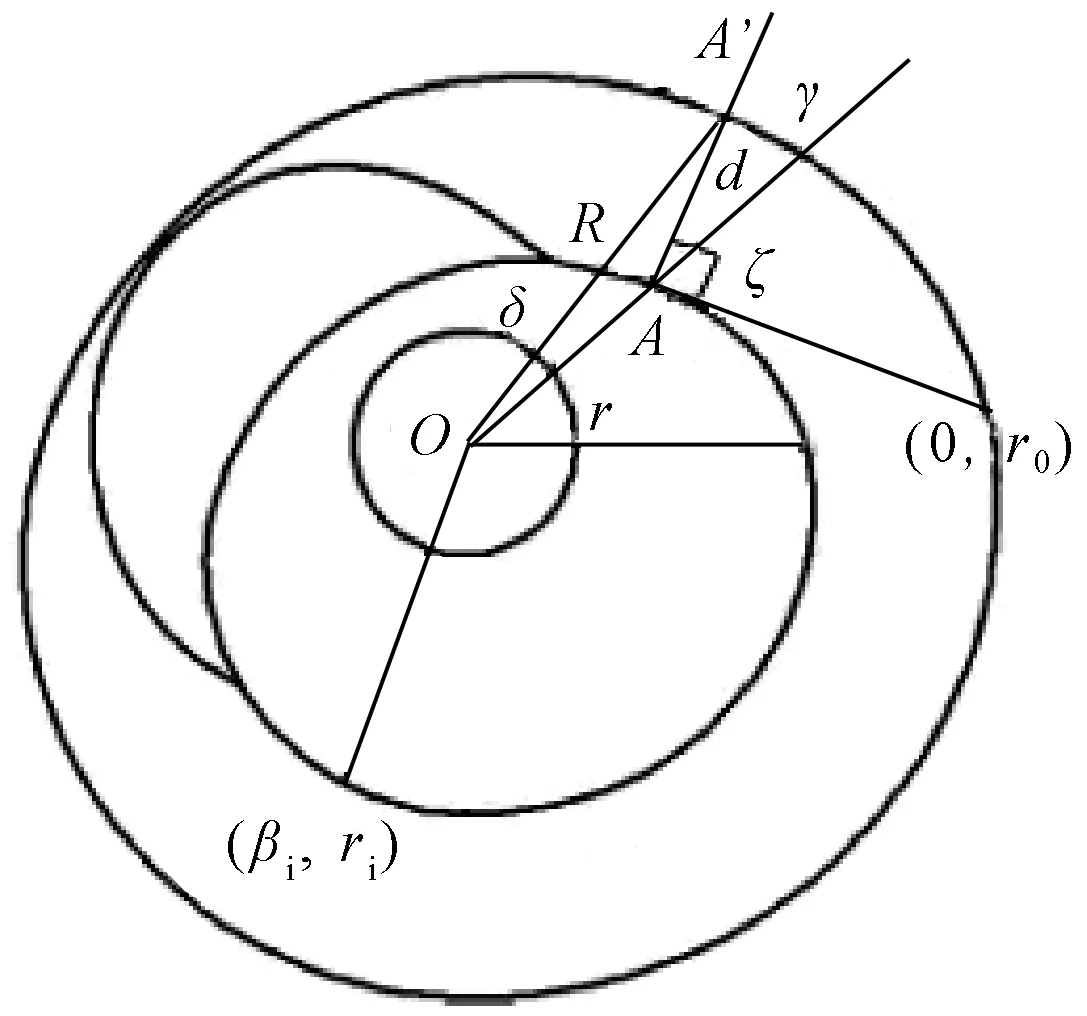
图1 共轭凸轮示意图Fig.1 Sketch of conjugated cams
设该轮廓线由坐标分别为(β1,r1),…,(βi,ri),…,(βn,rn)的n个测量点围成,有(β0,r0)=(βn,rn)
1.2 三次样条函数的构造
对上述型值点分段拟合,拟合函数设为
(1)
令一阶导数为r′(βi)=mi,r(βi)=ri,其分段3次Hermite差值[7]为
(2)
ai(β)=
bi(β)=
设r(β)在区间[βi,βi+1]上:



(3)
求二阶导数,由于r(β)在节点βi处二阶连续,有r″(βi+0)=r″(βi-0),即:
化简为
λimi-1+2mi+μimi+1=gi, (i=1,2,3,…,n-1)
(4)
式中:
边界条件为周期性条件式:
式(4)可写成:
(5)
用追赶法求mi,再带入式(3)求每段表达式。
1.3 凸轮光顺
为直观表现轮廓线光滑程度,基于MatLab[8]开发了凸轮光顺软件,读入Excel形式的轮廓线型值点坐标,用上述方法求得各m值(凸轮轮廓升程/回程的一阶导)和凸轮轮廓升程/回程的二阶导数以及模拟曲率,并可输出凸轮的轮廓升程/回程曲线,以Excel格式保存m值、曲率以及插值后的型值点。
以某纺机厂旧凸轮为例,测得一组测量点以修复凸轮,经过分析对比,旧凸轮在240°附近表面有严重磨损,测绘后再现的表面轮廓线二阶导数变化突兀。基于光顺函数求解凸轮轮廓数据(部分数据见表1)保存成.lsp格式,导入CAD得轮廓草图,在UG中打开,建立三维模型求其曲率梳。图2示出光顺前后的主凸轮曲率梳对比。可看出,光顺后曲线变得光滑。取输入轴转速300 r/min,得从动件运动规律,如图3所示。图3(a)、(b)分别示出光整前后的输出轴角加速度曲线。可看出经设计加速度最大值大约减少30%,且加速度变化率(跃度)较大,在动力学层面不利于机构高速运行。原因是副凸轮没有重新共轭反求,导致啮合精度不高。

表1 差值计算结果Tab.1 Calculation result for interpolation

图2 曲率梳对比Fig.2 Comparing before (a) and after (b) smooth design curvature comb of cam

图3 光顺前后的角加速度曲线Fig.3 Comparing before (a) and after (b) smooth design of acceleration curves
2 凸轮反求设计
凸轮反求一般采用作图法和数值计算法。本文利用反转原理求解:设凸轮轴转速为零,则机架相对转速为反向的凸轮转速,从动件输出运动规律为已知,机构中构件相对位置关系及运动规律在任意时刻不变。由于滚子与凸轮时刻相切,通过求滚轮的运动规律得到凸轮轮廓线。
2.1 软件仿真反求
此方法基于UG[9]对点智能追踪完成,原理如图4所示。图中O为凸轮轴轴心,O′是与凸轮高副连接的滚子三角架中心,该三角架连接两个滚子,分别与主凸轮和待求解的副凸轮相切。其中,A′,B′是滚子轴心。设凸轮轴轴心固定,三脚架反转,选定与副凸轮啮合的滚子中心B′智能跟踪求解坐标值,进一步求包络线可得到副凸轮轮廓线。
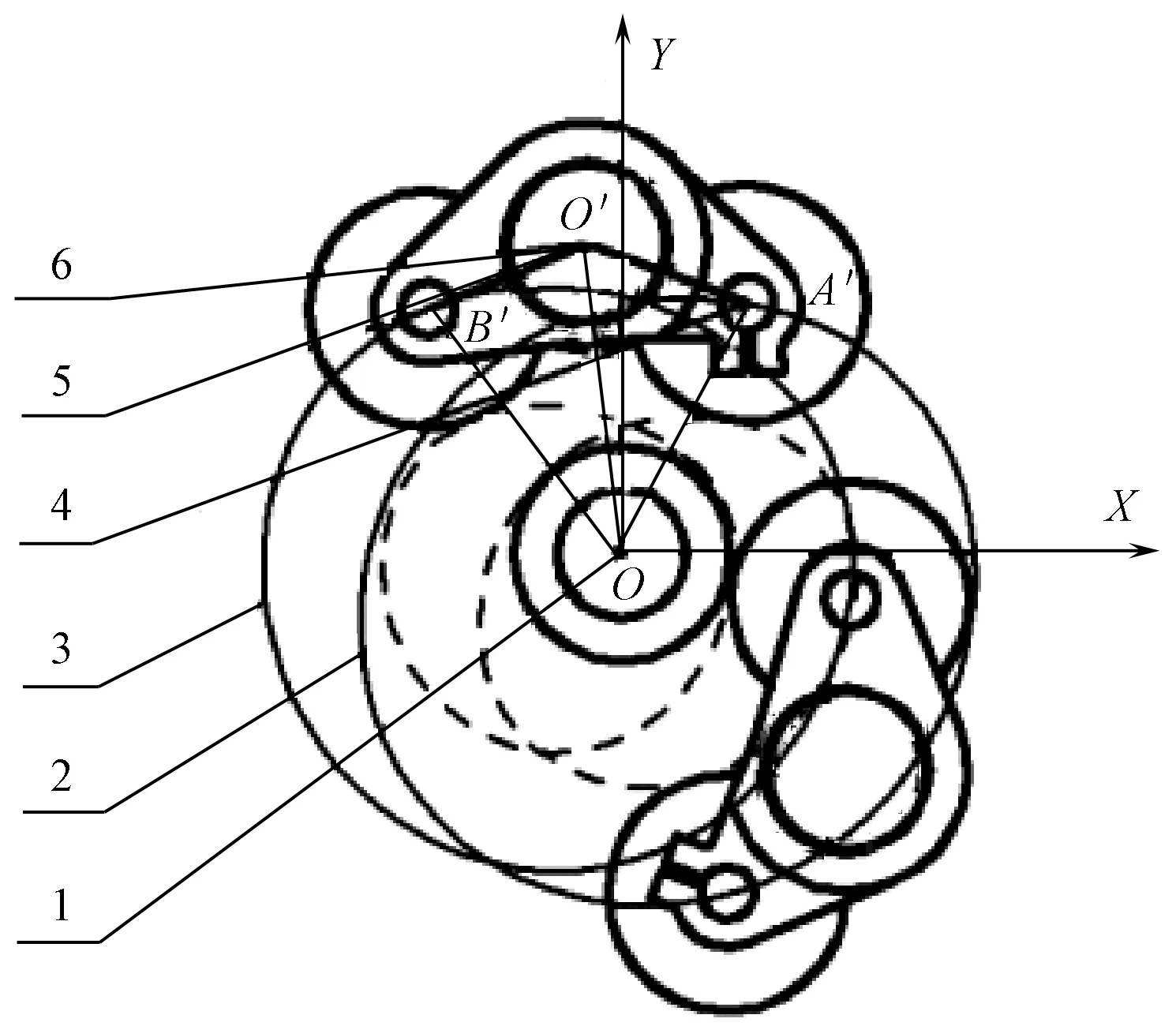
注:1—凸轮转轴; 2—主凸轮滚子轨迹; 3—副凸轮滚子轨迹; 4—主凸轮滚子; 5—副凸轮滚子; 6—输出轴。图4 副凸轮反求Fig.4 Reverse design schematics of deputy cam
2.2 数值分析反求
在图1的三角形OAA′中,滚子半径连线与极径夹角为
tanγ=(∂r/∂β)/r
(6)
(7)
sinγ=tanγcosγ
(8)
由余弦和正弦定理:

(9)

(10)
得:

(11)

(12)
滚子中心相对于凸轮的转角:
θ=β+δ
(13)
图4中,有O′A′=O′B′=L1,OO′=L2,OA′=R,OB′=R′,a=∠A′O′B′为已知量。
(14)

(15)

(16)
θB=θA+e+b
(17)
则得B点坐标(θB,R2)。
类似求副凸轮廓线,可得副凸轮滚子半径连线与极径夹角:
tanφ=(∂R2/∂β)/R2
(18)
r2和δ根据式(8)~(11)可得:

(19)
(20)
副凸轮滚子中心相对凸轮转角:
θ=β-δ
(21)
凸轮理论轮廓线求解完毕。
2.3 工程实例分析结果
针对所测绘的企业磨损凸轮,分别用2种办法求解,结果如图5所示。其中图5(a)中黑色粗拟合线为仿真结果。图5(b)为反求结果及反求前轮廓线结果对比,差异之处为磨损严重的地方。经对比反求结果与仿真结果基本吻合。验证了反求的有效性。
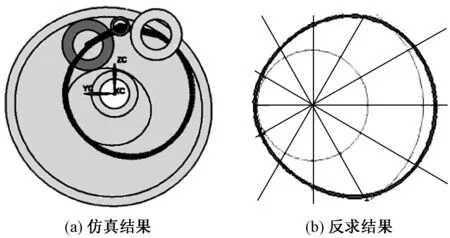
图5 求解结果Fig.5 Result of reverse design.(a) Simulation result;(b) Reverse result
针对求取结果设计新凸轮,带入引纬机构考量反求效果。新引纬机构输出件的仿真结果如图6所示。可看出,角加速度曲线整体规律不变,最值变化进一步减小,曲线比原结构明显光滑得多。从而验证了该方法的有效性。
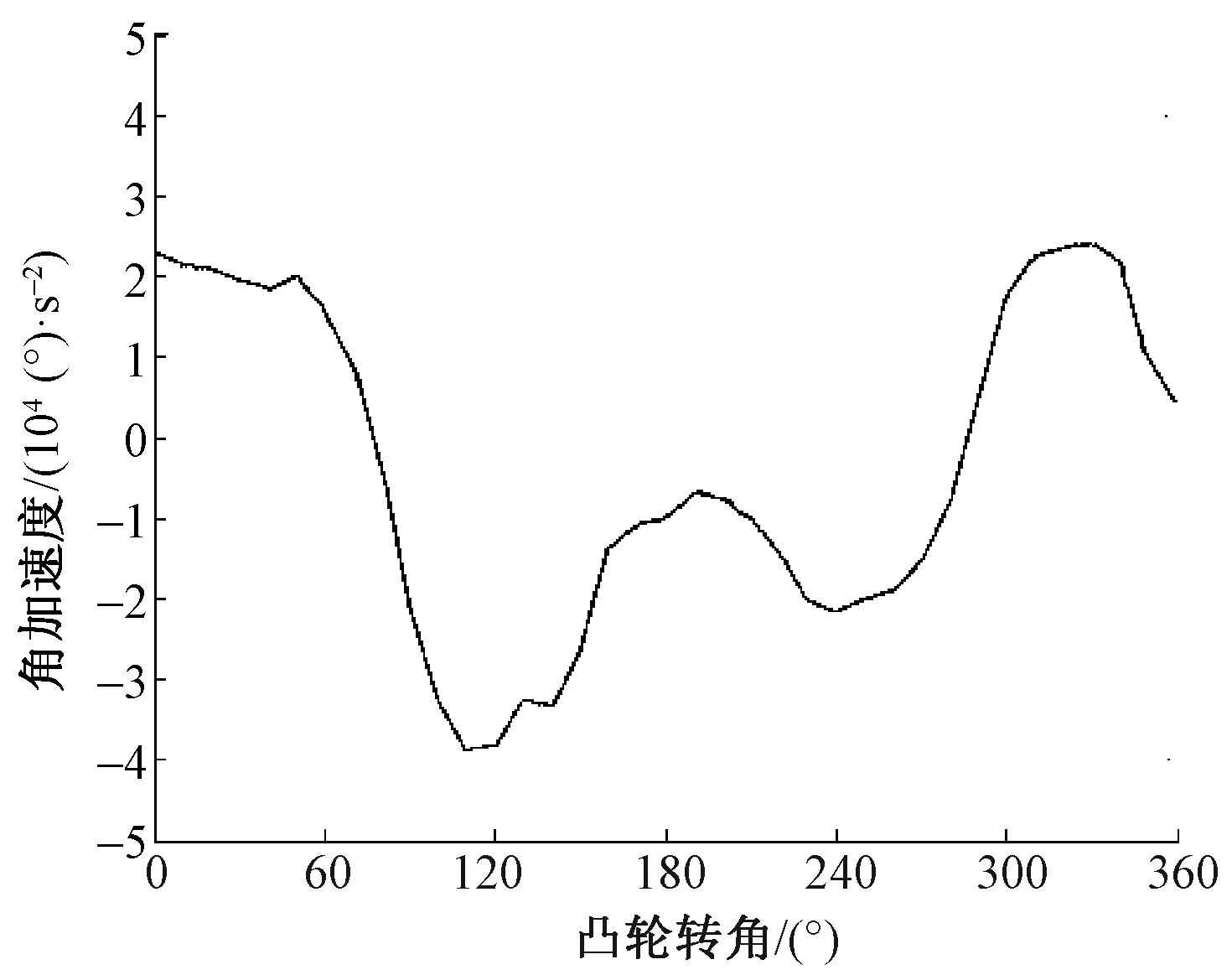
图6 输出件加速度曲线Fig.6 Angular acceleration curves of cam follower
3 轮廓线的二次设计
上述设计仍存在运动特性不完善之处,如速度、加速度不能同为零,为提升动力学性能,进一步修正加速度运动规律。常见运动规律有修正梯形加速度、双简谐、修正正余弦加速度组合等[10,11]。经比较试验,本文选用修正梯形对剑杆加速度进行设计。如图7所示。该加速度曲线为分段函数,t1~t10为各节点,T为周期,h1为正向最大值,h2为反向最大。曲线各段表达式为式(22)。连续求积分可得速度(式(23))和位移(式(24))。

图7 修正加速度曲线Fig.7 Acceleration curve of modified trapezoidal motion
(22)
(23)
(24)

(25)
由奇函数对称性和平移性质容易得到:
(26)
可知:
|h2|=|h1|
(27)
令h2=-h1,则:
(28)
(29)
由式(29)求得剑杆的位移、速度、跃度与凸轮转角之间的对应关系。即:
(30)
从剑杆运动反推凸轮轮廓,需要计算连接四杆机构的几何关系,如图8所示。β为摇杆与机架夹角,β0为初始角,则:
β=β0+s/(R×i1×i2)
(31)
式中:R为剑轮半径;i1、i2为齿轮机构传动比。摇杆与机架夹角α。

图8 引纬机构中的四杆机构Fig.8 Four-bar mechanism of weft insertion
在三角形O1OA中、O1OA和O1AB中:

(32)
(33)
α=∠O1OA+∠AOB
(34)
α求解后,即可反求凸轮。图9示出共轭凸轮机构。

图9 共轭凸轮机构Fig.9 Conjugate cam mechanism
由图9得:
ψ1,=γ-α-∠O1OO2
(35)
ψ2=ψ1-δ
(36)
滚子中心G1、G2坐标为 (-a+Lcosψ1,Lsinψ1), (-a+Lcosψ2,Lsinψ2),根据转角公式,可得G1、G2的坐标:
(37)
(38)
求导:
(39)
(40)

(41)
带入包络方程可得凸轮实际轮廓线为:
(42)
(43)
在二次反求的凸轮驱动下得摆杆运动特性如图10所示。可看出角加速度曲线基本不变,保证了曲线在速度为零的交接纬线时刻加速度为零,新机构引纬动力学性能明显得到提升。

图10 反求后从动件角加速度特性曲线Fig.10 Acceleration curves of follower after reverse design.
4 结 论
1)引纬机构的凸轮磨损造成了轮廓线上的点的坐标信息的不完备,基于高次样条插值和拟合算法可以反求这些信息点,因此这种算法在实际工程的凸轮磨损检测与修复中具有参考价值。
2)凸轮光顺很大程度上减小了输入转矩,是凸轮设计的必要环节。
3)由于不能保证各个型值点测量误差,三次样条插值后光顺的凸轮不能保证曲线规律与磨损前一致,需要进行运动规律层面的二次反求。
4)利用修正梯形加速度对共轭凸轮引进行二次反求,经仿真验证,可以保证剑杆剑头在两个极限位置时速度、加速度均为零。并且通过调整加速度规律可以获得满足引纬要求的共轭凸轮。
FZXB
[1] 王盛,张秋菊,李国良,等.剑杆织机打纬共轭凸轮机构分析及优化[J].机械研究与应用,2009(4):107-110.
WANG Sheng, ZHANG Qiuju, LI Guoliang, et al. Analysis and optimization of rapier loom′s beating cam conjugate[J]. Mechanical Research & Application, 2009(4): 107-110.
[2] ANGELES J. Synthesis of plane curves with prescribed local geometric properties using periodic splines[J]. Computer Aided Design, 1983, 15(3):147~155.
[3] 陈俊华,汤腾跃,马永洲,等.摆动从动件圆锥凸轮理论轮廓展开线曲率半径研究[J].机械工程学报, 2015, 51(1):10-16.
CHEN Junhua, TANG Tengyue, MA Yongzhou, et al. Research on the radius of curvature of oscillating follower conical cam′s expansion pitch curve[J]. Journal of Mechanical Engineering,2015, 51(1):10-16.
[4] 唐浩,邓朝晖,万林林,等.基于交替隔点插值的凸轮升程拟合方法在磨削加工中的应用[J].机械工程学报, 2012,48(23): 191-198.
TANG Hao, DENG Zhaohui, WAN Linlin, et al. Application of cam lift fitting method based on alternative-point interpolation in grinding process[J]. Journal of Mechanical Engineering, 2012, 48(23): 191-198.
[5] 董枫,陈顺怀.船体曲面的一种光顺重构法[J].哈尔滨工程大学学报,2016,37(2):198-204.
DONG Feng, CHEN Shunhuai. A fair reconstruction method of hull surface[J]. Journal of Harbin Engineering University, 2016,37(2):198-204.
[6] 李庆扬,王能超,易大义.数值分析[M]. 4版.武汉:华中科技大学出版社,2006:28-31.
LI Qingyang, WANG Nengchao, YI Dayi. Numerical Analysis [M]. 4th ed. Wuhan: Huazhong University of Science & Technology Press, 2006:28-31.
[7] 林万焕,王英,赵雄,等.基于Hermite 多项式的打纬运动学方程及其应用[J].纺织学报,2011,32(3):127-132.
LIN Wanhuan, WANG Ying, ZHAO Xiong, et al. Establishment and application of kinematics equations of beating-up motion based on Hermite polynomials[J]. Journal of Textile Research, 2011, 32(3): 127-132.
[8] 魏奔,孙志宏,李子军.基于Matlab的共轭凸轮机构设计[J]. 东华大学学报(自然科学版),2015,41(5): 663-669.
WEI Ben,SUN Zhihong,LI Zijun. The Matlab-based development of conjugate cam design[J].Journal of Donghua University(Natural Science), 2015,41(5):663-669.
[9] 吕洋波,胡仁喜,吕小波,等.UG NX 7.0动力学与有限元分析从入门到精通[M].北京:机械工业出版社,2010:96-108.
LÜ Yangbo, HU Renxi, LÜ Xiaobo, et al. Dynamics and Finite Element Analysis from Entry to the Master[M]. Beijing: China Machine Press, 2010:96-108.
[10] 郭宏亮,王青,叶国铭.修正梯形加速度运动规律中过渡曲线的设计[J].纺织学报, 2007,28(8):100-101, 109.
GUO Hongliang, WANG Qing, YE Guoming. Design of transitional curve of modified trapezoid acceleration motion[J]. Journal of Textile Research, 2007,28(8):100-101,109.
[11] 钱永明.非对称直线-余弦-直线运动规律及其在经编机中的应用[J].纺织学报,2015,36(12):135-139.
QIAN Yongming. Asymmetric line-cosine-straight motion law and application in warp knitting ma-chine[J]. Journal of Textile Research, 2015, 36(12):135-139.
Smoothandreversedesignofconjugatedcamsofweftinsertion
ZHANG Lei, SU Zongshuai, JI Zupeng, GU Pingping
(CollegeofMechanicalEngineering&Automation,ZhejiangSci-TechUniversity,Hangzhou,Zhejiang310018,China)
In consideration of the errors of the measurement data in the current cam production, and cams′contour curve deformation and damage after abrasion, a novel method of smooth and reverse design of conjugated cams in the weft insertion mechanism based on the limited measurement points was presented. In addition, a smooth and reverse software of the conjugate cam was developed using MatLab. Two-order continuous differentiable three spline function was used in this software to fit the data of conjugated cams. The curvature of the new curve was continuous and changes slowly. Geometric-relations were used to obtain the contour curve of the auxiliary cam. The motion laws of cam follower were obtained by using UG intelligent point and motion simulation function. In order to improve the motion law of the follower, the modified trapezoid acceleration law was used in the conjugated cams of the weft insertion mechanism. A cam profile is obtained by using inversion method and the envelope equation. After verification, the reverse cam can satisfy the requirements of weft insertion. It also provides a reference method for the design of the conjugated cams of the weft insertion mechanism.
weft insertion mechanism; conjugated cam; smooth design; reverse design; contour curve of cam
10.13475/j.fzxb.20160401509
TS 103.1
A
2016-04-06
2017-09-19
国家自然科学基金项目(51175475);浙江省自然科学基金项目(LY14E050027,LY15E050027)
张雷(1974—),男,副教授,博士。主要研究方向为机器人和纺织机械。E-mail:lzhang@zstu.edu.cn。
