基于正交试验的光电立靶光幕阵列结构参数优化方法
2017-12-01陈瑞倪晋平
陈瑞, 倪晋平
(西安工业大学 光电工程学院, 陕西 西安 710032)
基于正交试验的光电立靶光幕阵列结构参数优化方法
陈瑞, 倪晋平
(西安工业大学 光电工程学院, 陕西 西安 710032)
针对光电立靶光幕阵列结构参数标定误差较大的问题,提出一种光幕阵列结构参数反演优化的方法。以测量坐标与纸板靶坐标差值的平方根构建目标函数,借助正交试验在允许误差范围内产生多组不同参数量值的组合,设计了光幕阵列结构参数优化方法。以双N形天幕靶为例,在Matlab中进行仿真,优化后的光幕阵列结构参数更接近给定真值,且结构参数的优化程度与标定的初始值和误差范围相关。用实弹射击试验对设计的方法进行验证,结果表明,优化后的弹丸飞行参数测量结果更接近实际真值,设计的方法有效可行。该优化方法为提高光电立靶测量设备的测量精度提供了一种新思路。
兵器科学与技术; 光幕阵列; 多目标优化; 反演; 结构参数
0 引言
弹丸飞行参数是衡量身管武器性能和武器效能评估的重要指标,主要包括弹丸空间坐标、飞行速度及速度方位角和俯仰角等[1-2]。现有的弹丸飞行参数测量方法主要有:纸板靶法[3-4]、声学法[5]、电荷耦合器件法[6-7]、光幕阵列法[8-9]。其中,光幕阵列法以其适用范围广、可靠性高、成本低廉等优点在靶场外弹道测量领域得到越来越广泛的应用。若干个光幕在空间以特定的几何结构排列,弹丸依次穿过各个光幕面,通过记录弹丸到达每个光幕面的时刻,配合光幕阵列结构参数信息,从而解算出弹丸的飞行参数。光幕阵列空间几何结构多种多样,双光幕阵列以平行结构排列,可以通过定距测时的方法测量弹丸飞行速度;四光幕阵列以双N形结构排列,可以测量垂直入射弹丸的速度和坐标[10];六光幕阵列以双V形或双N形结构排列,可以测量任意角度飞行的弹丸坐标、速度及速度方位角和俯仰角[11-12]等。各种类型光幕阵列的空间结构一般通过光幕之间的夹角进行描述,它们在光幕阵列测量设备成型后通过标定的方法得到,但由于形成的光幕在空间是肉眼不可见的,无法直接测量,常常导致标定的角度误差较大,从而影响测量精度。本文以双N形六光幕阵列天幕立靶为例提出一种光幕阵列结构参数反演优化方法,将弹丸实际着靶坐标作为已知条件,以弹丸测量坐标与实际坐标差值的均方根构建目标函数,采用正交试验在多组不同结构参数量值组合下寻求目标函数的最小值,最终实现光幕阵列结构参数优化。
1 双N形光幕阵列测量原理
双N形六光幕阵列天幕立靶的一个靶体可在空间形成一个N形光幕,两个靶体(分别称为启动靶和停止靶)沿弹道线方向布置,可在空间形成双N形排列的探测光幕。由于弹丸穿过光幕面时探测电路输出的弹丸过幕时刻为弹丸到达每个幕面固定位置的时刻,在双N形六光幕阵列测量原理中空间光幕可用理想平面表示[13-14]。图1给出了双N形六光幕阵列的测量原理,图2是空间光幕在坐标系平面内的投影。

图1 双N形六光幕阵列示意图Fig.1 Structure of double-N shaped six-light-screen-array

图2 空间光幕在坐标系平面投影Fig.2 Projection view of light-screen structure
测量坐标系如图1所示,s1为起始靶与停止靶靶距、h为高度差,统称为布靶参数。图2中实线光幕表示图1中光幕在坐标系内的真实投影,虚线光幕表示图1中光幕在坐标系内投影的截面,则光幕阵列空间结构参数可表示为竖直夹角α=[α1,α2,α3,α4]和水平夹角β=[β1,β2],记弹丸到达每个光幕的时刻为t1~t6,将6个光幕面G1~G6用空间平面方程表示,在靶距较短的情况下弹丸在光幕阵列内所受的空气阻力和重力作用可忽略不计,则此过程中可假定弹丸做匀速直线运动,弹道线与空间光幕的交点以矩阵形式[14]表示为
M·X=N,
(1)
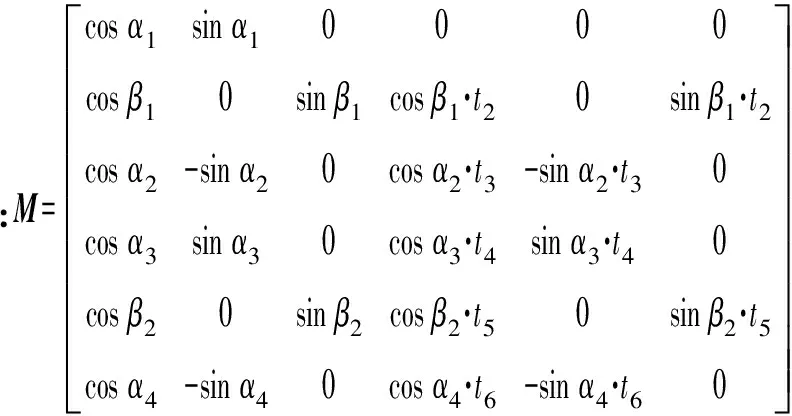

通过解算得到的弹丸在光幕G1内的空间坐标和飞行速度矢量为
X=M-1·N.
(2)
从(2)式可见,弹丸的空间坐标测量结果与光幕阵列结构参数密切相关。现有的光幕结构参数获取方法通常需要对天幕立靶进行拆卸,再由人工标定得到光幕之间的夹角,不仅标定过程繁琐,且得到的光幕阵列结构参数往往也存在较大误差,若有一种方法可对标定的结果进行优化,将有效的提高光幕阵列设备的测量精度。
2 优化方法及目标函数构建
由于光幕阵列在测量过程中对弹丸的飞行轨迹不产生任何影响,在其后垂直于弹道方向再放置一个纸板靶,则可通过弹孔直接测量弹丸在纸板靶上的坐标(视为准真值),以双N形六光幕天幕立靶为例表示上述过程,如图3所示。
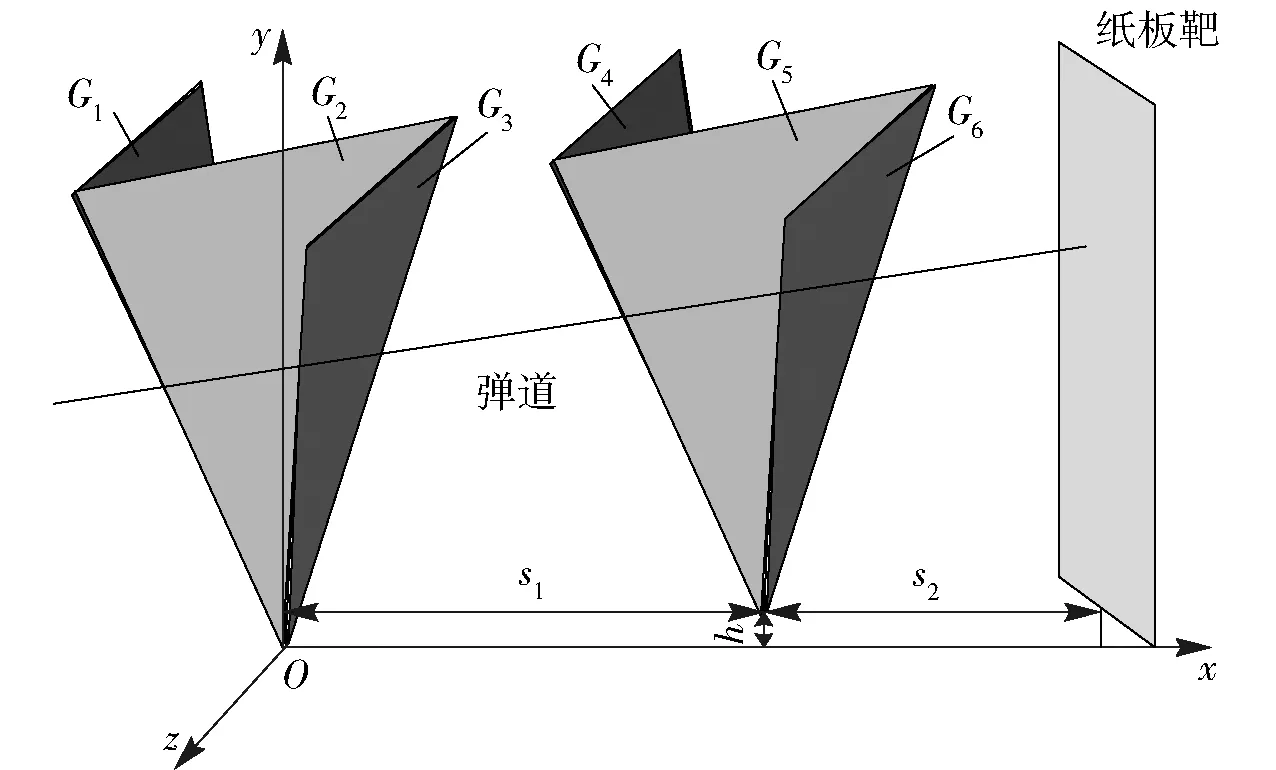
图3 双N形光幕阵列优化方法模型Fig.3 Optimization model of double-N shaped six-light-screen-array
图3中S2为停止靶到纸板靶的距离,(2)式中的测量结果可从G1平面换算至纸板靶平面得到光幕阵列测量的纸板靶处弹丸坐标[15],理论上在纸板靶处光幕阵列测量的坐标与纸板靶坐标相等,但由于光幕阵列结构参数和其他误差因素的影响,两组坐标必然存在一定偏差,该偏差表征了光幕阵列测量结果与准真值的接近程度,在其他误差因素不变的情况下,该偏差可以用来表征光幕阵列结构参数与结构参数真值的接近程度。
在图3所示的模型中,将双N形光幕阵列和纸板靶测定的两组坐标结果分别记为(z,y)和(z*,y*),构建两个目标函数δy和δz分别表征光幕阵列测量结果与纸板靶测量结果纵坐标和横坐标的偏差,即
(3)
式中:n是参与优化的弹丸总数;i是弹丸序号。
由于光幕阵列测量的弹丸坐标结果是光幕阵列几何结构的函数,其值包含了光幕阵列的结构参数信息,且在双N形六光幕阵列天幕立靶测量模型中,空间光幕夹角一般在设备成型后固定不变。因此在其他误差因素不变的情况下,测量公式中选取的光幕阵列结构参数越接近实际真值则两组坐标测量结果的偏差越小,反之则越大,构建的目标函数δy和δz可分别度量结构参数在竖直和水平方向的准确度。
3 基于正交试验设计的光幕阵列参数优化方法
将双N形光幕阵列结构参数作为影响试验结果的因素,基于正交试验产生多组不同量值的结构参数组合,能充分反应全面试验的要求。依据测量原理,坐标测量结果中纵坐标y仅受光幕竖直面夹角α的影响,而横坐标z测量结果主要受光幕水平面夹角β的影响,因此本文依据(3)式设计两组连续试验先后对α=[α1,α2,α3,α4]和β=[β1,β2]进行优化。
首先将[α1,α2,α3,α4]作为影响试验结果δy的4个因素即待反演优化参数,将标定的结果[α1o,α2o,α3o,α4o]作为初始值,在初始值附近选择标定误差±ε作为实际光幕夹角可能出现的范围生成5水平,对应的因素水平表如表1所示。
选取正交表L25(56)对表1中的4个参数设计4因素5水平试验,过程中由于β对立靶纵坐标测量结果没有影响,其值代入标定的初始值[β1o,β2o]不变,在α标定的初始值[α1o,α2o,α3o,α4o]附近产生25种不同形式的正交组合,不同的参数组合下对应的弹丸纵坐标y随之变化,进而引起目标函数δy的变化,假设试验中目标函数的最小值出现在第j组,则此时光幕夹角α与实际情况最接近,其对应的光幕阵列竖直方向夹角[α1j,α2j,α3j,α4j]即为α优化后的结果。

表1 竖直面内夹角因素水平表
之后对水平面内夹角β进行优化,由于[β1,β2]决定弹丸着靶横坐标z的测量结果,此时目标函数变为δz,待反演优化的参数只有两个,根据正交规则β1的每一个水平和β2的每一个水平都需产生组合,以标定结果[β1o,β2o]作为初始值,在初始值附近选择标定误差±ε作为实际光幕夹角可能出现的范围生成5水平,对应的因素水平表如表2所示。

表2 水平内夹角因素水平表
与α的优化过程类似将表2中的2个5水平因素填入正交表L25(56)的前2列产生25种正交组合,取α为之前优化得到的结果[α1j,α2j,α3j,α4j]不变,则不同的参数β组合下目标函数δz取值发生显著变化,假设试验中目标函数的最小值出现在第k次试验,则对应的[β1k,β2k]即为水平夹角优化后的结果。至此通过两次连续试验可对双N形六光幕天幕立靶的6个光幕空间结构参数完成反演优化。
4 仿真分析及优化
在Matlab中建立双N形六光幕阵列模型,假定光幕阵列结构参数的真值为α1=α2=α3=α4=25°,β1=β2=24°,并在模型中精确给定,在上述真值附近±0.6°随机生成一组数字作为光幕阵列结构参数的标定结果:α1o=25.4°,α2o=25.5°,α3o=24.9°,α4o=24.5°;β1o=23.5°,β2o=23.6°;构建500 mm×500 mm靶面并生成n=15发弹丸穿过靶面,生成弹丸的飞行参数为弹速v=(720±30)m/s,速度俯仰角γ=0°±4°,速度方向角θ=0°±4°.
用第3节设计的方法,选择ε=0.6°作为各夹角真值可能出现的范围,对生成的标定结果进行仿真优化,得到所有组合下目标函数的最小值δy,min=1.859 4,δz,min=8.562 6对应的结构参数优化结果见表3.
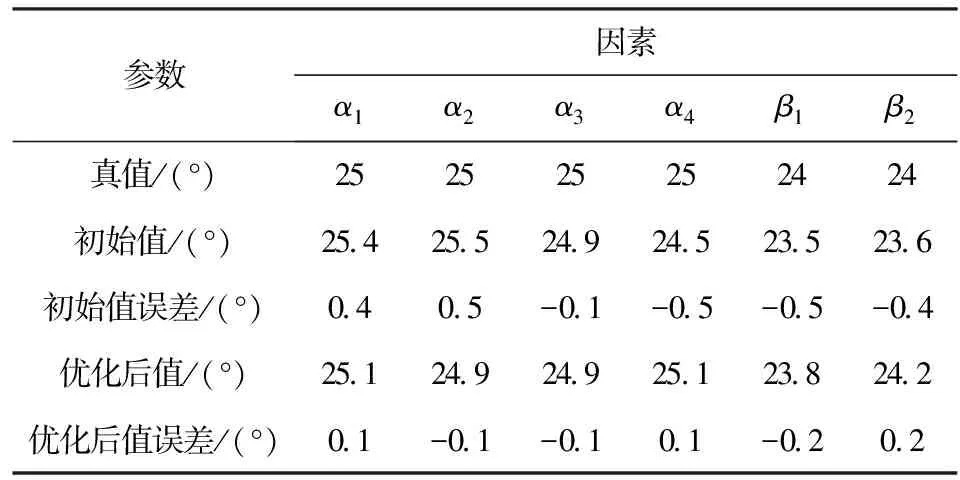
表3 双N形光幕阵列仿真结果
从表3可见,仿真优化后各结构参数的取值更接近于给定真值。
为研究不同参数初始值和参数范围ε对本文方法的影响,取ε=0.3°和ε=0.9°在真值附近重新随机生成两组天幕立靶初始结构参数并用第3节设计的方法对其进行仿真优化,两次仿真得到所有组合下目标函数的最小值分别为δy,min=1.502 3,δz,min=4.511 4和δy,min=2.134 7,δz,min=12.396 1,对应的结构参数初始值和优化后的结果分别见表4和表5所示。
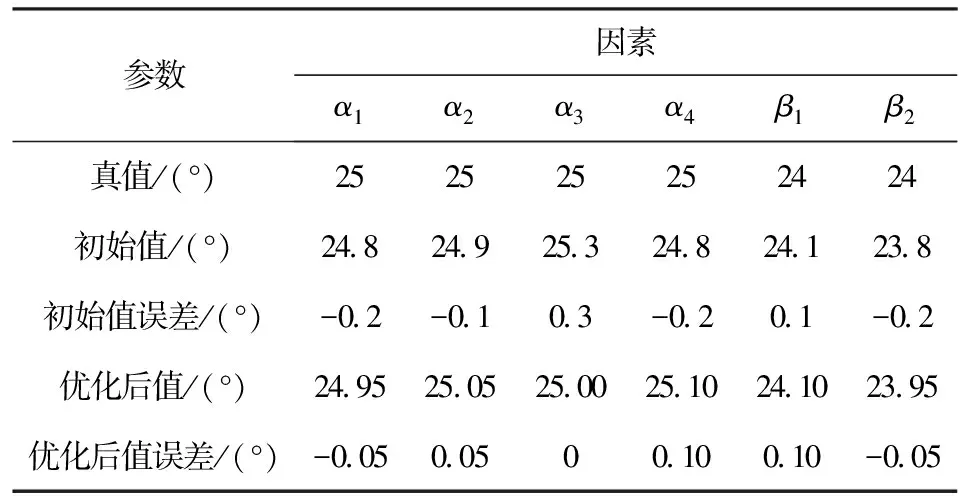
表4 双N形光幕阵列仿真结果(ε=0.3°)
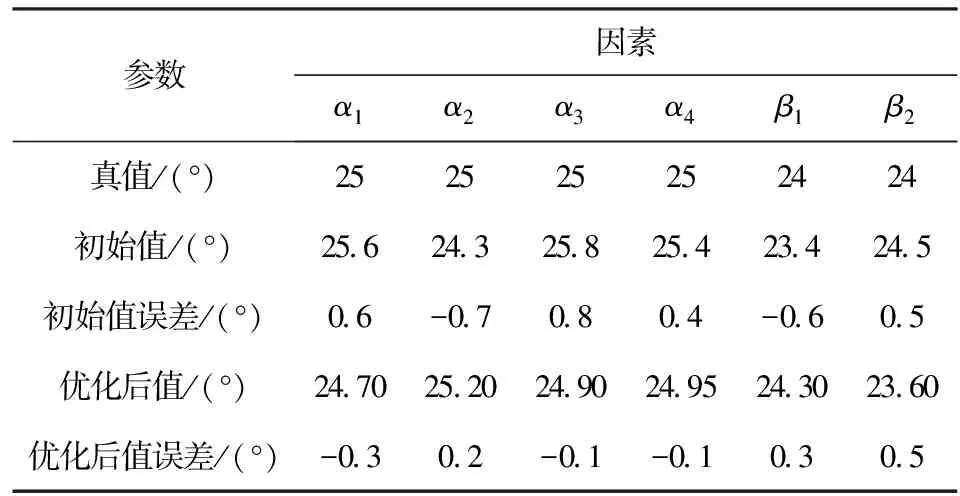
表5 双N形光幕阵列仿真结果(ε=0.9°)
从表4和表5中可以看出,本文方法对光幕阵列结构参数的优化程度与光幕阵列结构参数的标定方法相关,标定精度高的方法初始值相对准确、参数误差范围(步长)ε较小,优化结果也越好。另外还需要注意的是,理论上为了减小随机误差,此方法在实际工程应用时选取的弹丸总数不宜过少,为了尽可能地使试验简化,在射击过程中可使参与优化的弹丸在靶面内均匀分布,在减小射击次数的同时反映空间不同位置处的光幕阵列结构信息,从而保证反演优化结果的精度。
5 实际测试验证
依据图3所示的模型,用双N形光幕阵列天幕立靶工程样机进行试验,试验现场如图4所示。

图4 试验现场Fig.4 Photo of testing site
采用木板贴坐标纸的方式构成500 mm×500 mm纸板靶后方放置收弹箱,图4中激光水平仪、投线仪等用于保证立靶与纸板靶间相对关系,布靶过程中起始靶与停止靶高度差h=0 mm、距离s1=4 724 mm,停止靶与纸板靶距离s2=1 400 mm. 用气枪进行20次射击使弹丸均匀分布在整个靶面,分别记录每发弹丸穿过光幕阵列的过靶时刻序列和弹丸在纸板靶上的弹孔坐标,用本文方法将弹丸过靶时刻序列代入不同试验序号下对应的光幕阵列结构,解算天幕立靶着靶坐标,并换算至纸板靶所在的平面与纸板靶坐标进行比对,计算得到对应的目标函数值。
以所选双N形光幕阵列标定值作为初始值,精度取ε=0.6°,优化前后的结构参数如表6所示。
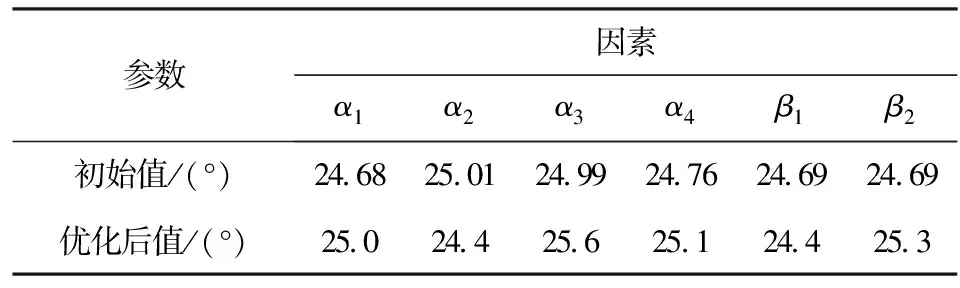
表6 双N形光幕阵列实弹试验结果

图5 优化前后测量结果比对Fig.5 Comparison of measured results of structure parameters before and after optimization
为验证本文优化结果的正确性,将优化后的双N型光幕阵列天幕立靶在室外重新进行15次随机射击,分别用优化前后的两组结构参数对着靶坐标进行测量,对优化前后结构参数下测量结果与纸板靶的偏差进行统计,结果如图5所示。
从图5可以看出,两组试验结果与实际弹孔坐标的测量误差在横坐标、纵坐标方向分布一致,均在0 mm的上下波动,但在初始结构参数下测量结果偏差的误差绝对值及波动较大,优化后的结构参数下测量结果偏差的误差绝对值及波动较小。试验验证了本文方法可以实现双N形天幕立靶光幕阵列结构参数的优化,优化后的光幕阵列测量结果与弹丸实际着靶坐标相比误差更小。
6 结论
光幕阵列方法测量弹丸飞行参数,结构参数的准确性直接影响测量精度,以天幕立靶为例,本文提出了一种光电立靶光幕阵列结构参数优化方法,用于提高其准确性。得到主要结论如下:
1) 将弹丸的弹孔坐标作为准真值,以测量坐标与弹孔坐标差值平方根最小为原则构建目标函数,借助正交试验表设计反演方法,实现了光幕阵列结构参数优化。
2) 在Matlab中进行仿真,结果显示用设计的方法优化后的双N形光幕阵列结构参数更接近给定真值,且结构参数的优化程度与结构参数标定的初始值和误差范围相关。
3) 用实弹射击试验对设计的方法进行验证,结果表明,优化后的弹丸飞行参数测量结果更接近实际真值,设计的方法有效可行。
本文方法可减小光电立靶测量设备结构参数的标定误差,为提高该类设备的测量精度提供了一种新思路。
References)
[1] 王昌明. 实用弹道学[M]. 北京:兵器工业出版社, 1994.
WANG Chang-ming. Utility ballistics[M]. Beijing: Publishing House of Ordnance Industry, 1994. (in Chinese)
[2] Stepanov E, Vavilov S A. The main problem of external ballistics[J]. Computers & Mathematics with Applications, 1997, 33(5):95-101.
[3] David C, Smith P E. Line of sight beyond line of sight advanced technology demonstrator[C]∥40th Annual Armament Systems: Gun-Ammunition-Rockets-Missiles Conference & Exhibition. New Orleans, LA, US: Department of Defense, 2005.
[4] Corriveau D. System modeling of a 40 mm automatic grenade launcher[C]∥42nd Gun and Missile Systems Conference & Exhibition. Charlotte, NC, US:NDIA, 2007.
[5] Canistraro H A, Jordan E H. Projectile-impact-location determination: an acoustic triangulation method[J]. Measurement Science and Technology, 1996, 7(12):1755-1760.
[6] 刘泽庆, 张玉荣, 赵建新, 等. 基于数字摄影测量的靶场高速摄影测速方法[J]. 弹道学报, 2015, 27(4):47-51.
LIU Ze-qing, ZHANG Yu-rong, ZHAO Jian-xin, et al. High-speed photography velocity measurement in range based on digital photogrammetry[J]. Journal of Ballistics, 2015, 27(4):47-51.(in Chinese)
[7] Ma W H, Dong T, Tian H, et al. Line-scan CCD camera calibration in 2D coordinate measurement[J]. Optik, 2014, 125(17): 4795-4798.
[8] Gauthier Jr L R., Drewry Jr D G, Brunner L. Optical sensor and method for detecting projectile impact location and velocity vector: US, US6931166[P]. 2005-08-26.
[9] Kalonia R C, Chhachhia D P, Bajpai P P, et al. Multiple laser-based high-speed digital shadowgraphy system for small caliber projectile-target interaction studies[J]. Optical Engineering, 2014, 53(3):034104.
[10] HPI.B572 optical target system[EB/OL]. [2015-03-08]. http:∥www.hpi-gmbh.com/redesign/products_10.htm.
[11] Li H S, Gao J C, Wang Z M. Object location fire precision test technology by using intersecting photoelectric detection target[J]. Optik, 2014, 125(3): 1325-1329.
[12] 田会, 倪晋平, 焦明星. 抛物线弹道弹丸飞行参数测量模型与精度分析[J]. 仪器仪表学报, 2016, 37(1):67-74
TIAN Hui, NI Jin-ping, JIAO Ming-xing. Projectile flying parameter measurement model of parabolic trajectory and precision analysis[J]. Chinese Journal of Scientific Instrument, 2016, 37(1):67-74.(in Chinese)
[13] 张斌, 赵冬娥, 刘吉, 等. 基于重心法的激光光幕弹丸过把信号特征点提取算法[J]. 火炮发射与控制学报, 2015, 36(3):68-71.
ZHANG Bin, ZHAO Dong-e, LIU Ji, et al. Algorithm of extracting the moment when projectile passes through a laser screen using center of gravity method[J]. Journal of Gun Launch & Control, 2015, 36(3):68-71.(in Chinese)
[14] 倪晋平, 田会. 用于光幕测试的时刻信息提取方法研究[J]. 光学技术, 2008, 34(1):141-148.
NI Jin-ping, TIAN Hui. A study on method for acquiring moment on which a projectile going through a light screens[J]. Optical Technique, 2008, 34(1):141-148.(in Chinese)
[15] 陈瑞, 倪晋平, 侯飒. 三种着靶坐标自动测量设备精度评价方法[J]. 测试技术学报, 2017, 31(1):70-75.
CHEN Rui,NI Jin-ping, HOU Sa. Three accuracy assessment methods of automatic projectile impact coordinates measurement system[J]. Journal of Test and Measurement Technology, 2017, 31(1):70-75.(in Chinese)
OptimizationMethodofLight-screen-arrayStructureParametersofPhotoelectricTargetBasedonOrthogonalTest
CHEN Rui, NI Jin-ping
(School of Optoelectronic Engineering, Xi’an Technological University, Xi’an 710032, Shaanxi, China)
An optimization method for inversion of light-screen-array structure parameters is presented for their large calibrated errors. An objective function is established by using the square root of difference between measuring coordinates and actual coordinates, many groups of structure parameters are generated within the allowable error range based on orthogonal test, and the optimization method of light-screen-array structure parameters is designed. The simulated results of double-N shaped sky screen target in Matlab shows that the optimized results are affected by the initial value and the allowable error range, and the ball cartridge test results show that the proposed method is feasible and effective. The optimization method provides a new idea for improving the measuring accuracy of photoelectric target measuring equipment.
ordnance science and technology; light-screen-array; multi-objective optimization; inversion; structure parameter
TJ012.3+7
A
1000-1093(2017)11-2234-06
10.3969/j.issn.1000-1093.2017.11.021
2017-04-12
国家自然科学基金项目(61471289); 陕西省自然科学基础研究计划项目(2015JM5189); 陕西省教育厅重点实验室科研计划项目(14JS035)
陈瑞(1987—), 男, 博士研究生。 E-mail: chenrui_xatu@163.com
倪晋平(1965—), 男, 教授, 博士生导师。 E-mail: jpni@263.net
