基于距离和姿态观测量的GNSS基线网平差方法
2017-11-29白征东汤晓禹
白征东,汤晓禹,项 伟,2
(1. 清华大学地球空间信息研究所,北京 100084; 2. 空军工程设计研究局,北京 100076)
基于距离和姿态观测量的GNSS基线网平差方法
白征东1,汤晓禹1,项 伟1,2
(1. 清华大学地球空间信息研究所,北京 100084; 2. 空军工程设计研究局,北京 100076)
针对目前单历元算法需要连续观测较长时间才能够得到较为精确的解算结果的问题,利用载具同时架设3台GNSS接收机,获得基线观测量,同时事先精确测定接收机之间的距离,并利用陀螺仪获得载具的姿态角,通过增加距离和姿态观测量,与基线观测量共同进行平差处理,可以得到单历元较为稳定而精确的坐标解算结果。试验表明,平面精度在10 mm以内,高程精度在3 cm以内,相较于不添加距离和姿态观测量的结果精度提高了15%以上。
GNSS;姿态约束;距离约束;平差处理
目前GNSS单历元算法在定向、测姿及变形监测等领域得到了越来越广泛的应用,这种方法不需要探测和修复周跳[1],但只有在长时间连续观测的情况下才能够达到较高的精度[2]。因此有必要增加观测量和约束条件,从而使单历元解算结果精度较高且稳定。
本文在现有GNSS单历元算法的基础上,设计3台固定在载具上的接收机同时观测,并提前测得3台接收机之间的距离,利用陀螺仪提供姿态信息,从而提供距离和姿态约束,共同进行平差处理得到最终的坐标解算结果,并与没有添加距离和姿态约束条件的结果进行比较。
1 算法研究
本文算法的核心是综合利用基线条件、距离信息和姿态信息,对3个GNSS接收机的坐标进行约束平差,从而得到相较于单基线解算更为精确的结果。
为了方便姿态角的计算,需要将坐标由WGS-84坐标转换到站心坐标ENU中[3],以基准站所在点作为坐标原点,在进行单历元解算时,以3个接收机的坐标值作为待定参数,即
通过GNSS解算可以得到待定参数近似坐标为
3个接收机和基准站可组成6条基线,另外还有3个距离观测量和3个姿态角观测量,可以组成误差方程,即
(1)

1.1 基线网误差方程
GNSS网如图(1)所示,O为基准站,a、b、c为载具上的3台移动站,共构成了Oa、Ob、Oc、ab、ac、bc6条基线,根据GNSS网平差原理,可以列出误差方程[4]为
(2)
权矩阵
(3)
式中
V1=[vEOavNOavUOavEObvNObvUObvEOcvNOcvUOcvEabvNabvUabvEbcvNbcvUbcvEacvNacvUac]T
I3为三阶单位阵;D是由各观测基线向量的协方差矩阵构成的块对角阵。

图1 基线网示意图
1.2 姿态角误差方程
陀螺仪在载具每运动一定距离时会提供一个角增量,利用积分便可以得到前后两个测点之间姿态角的增量,在初始点利用GNSS进行较长时间的观测可以求解得到高精度的初始姿态角,根据初始姿态角可以算得每个测点的姿态角观测量。
姿态角包括偏航角y(yaw)、俯仰角p(pitch)和横滚角r(roll),这3个角度共同定义了载体的姿态,即载体坐标系相对于当地水平坐标系的方位关系[5]。因此,姿态角求解的核心即为坐标系的旋转变换[6]。
载体坐标系以主接收机为原点,X轴指向载体前进方向的垂直方向,Y轴为载体前进方向,Z轴为垂直于载体平面的方向,构成右手坐标系[7]。当地水平坐标系则是将站心坐标系的原点由初始原点移动至载体坐标系构成的坐标系。坐标系之间的关系如图2所示。
载体坐标系到当地水平坐标系的转换公式为
(4)
式中,Rb2l为3×3的转换矩阵;Xb为载体坐标系坐标。由于接收机固定于载体上,因此载体坐标保持不变。

图2 坐标系关系示意图
利用直接法[8]可以得到
(5)
(6)
(7)
其中,由于高精度陀螺仪测得的姿态角误差很小,为了简化计算,可以将式(7)中的y、p用陀螺仪得到的偏航角yg、俯仰角pg代替进行计算,即
(8)

(9)
式中
(10)
(11)

(12)
l2=[ygpgrg]T-[y0p0r0]T
(13)
1.3 距离观测量误差方程
3台GNSS接收机固定于载具上,它们之间的距离始终保持不变,在试验前精确测定3点之间的距离Lab、Lac、Lbc,建立3条边长观测量的误差方程为[9]
(14)
根据上面各式,可以将基线观测量误差方程、姿态角观测量误差方程和距离观测量误差方程组成一个统一的误差方程,进行平差处理,即
(15)
三者的权需要根据观测值精度的具体情况来确定,组成合适的权阵进行计算。
2 实例分析
以12月2日进行的试验为例,利用上述方法对测得的GPS+BDS双系统数据进行了分析处理。
载具上固定的3台GNSS接收机之间的距离事先测定,见表1,其中ab方向为载具前进方向。

表1 各接收机距离 mm
以基准站O为站心,建立站心直角坐标系,通过坐标转换公式[10]得到各接收机的站心坐标。在初始点静止观测较长时间,得到3个GNSS接收机精确的初始坐标见表2,初始姿态角见表3。
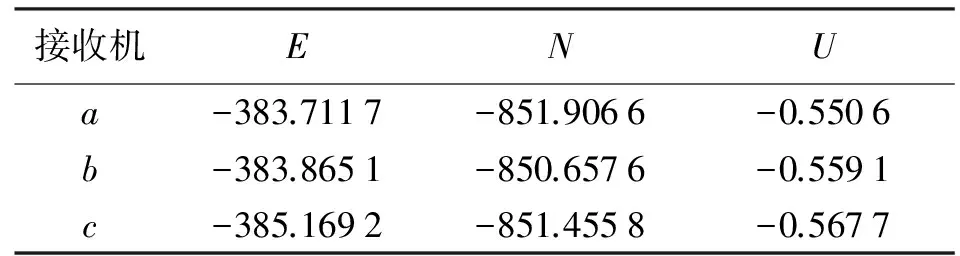
表2 各接收机初始坐标 mm

表3 初始姿态角
试验中在各个测点依次进行了测量,共测量了5个点,将得到的数据分别利用常规基线网平差方法和上述添加了距离、姿态约束的平差方法进行了解算,得到的各个点的解算结果见表4。从表中可以看出,添加了距离和姿态约束以后,平差后得到的结果精度较正常基线网平差有了较大幅度的提高,标准差平均减小了15%以上,单历元解算的最大偏差也得到了较大降低。通过这种方法处理后,E、N方向的最大误差都在10 mm以内,标准差都基本控制在3 mm以内。而U方向的精度相对较差,这是由于GNSS单历元算法本身高程方向精度较低,通过添加姿态、距离约束也难以从根本上改善,但相对不加约束的结果,也已经有了较大程度的提高。
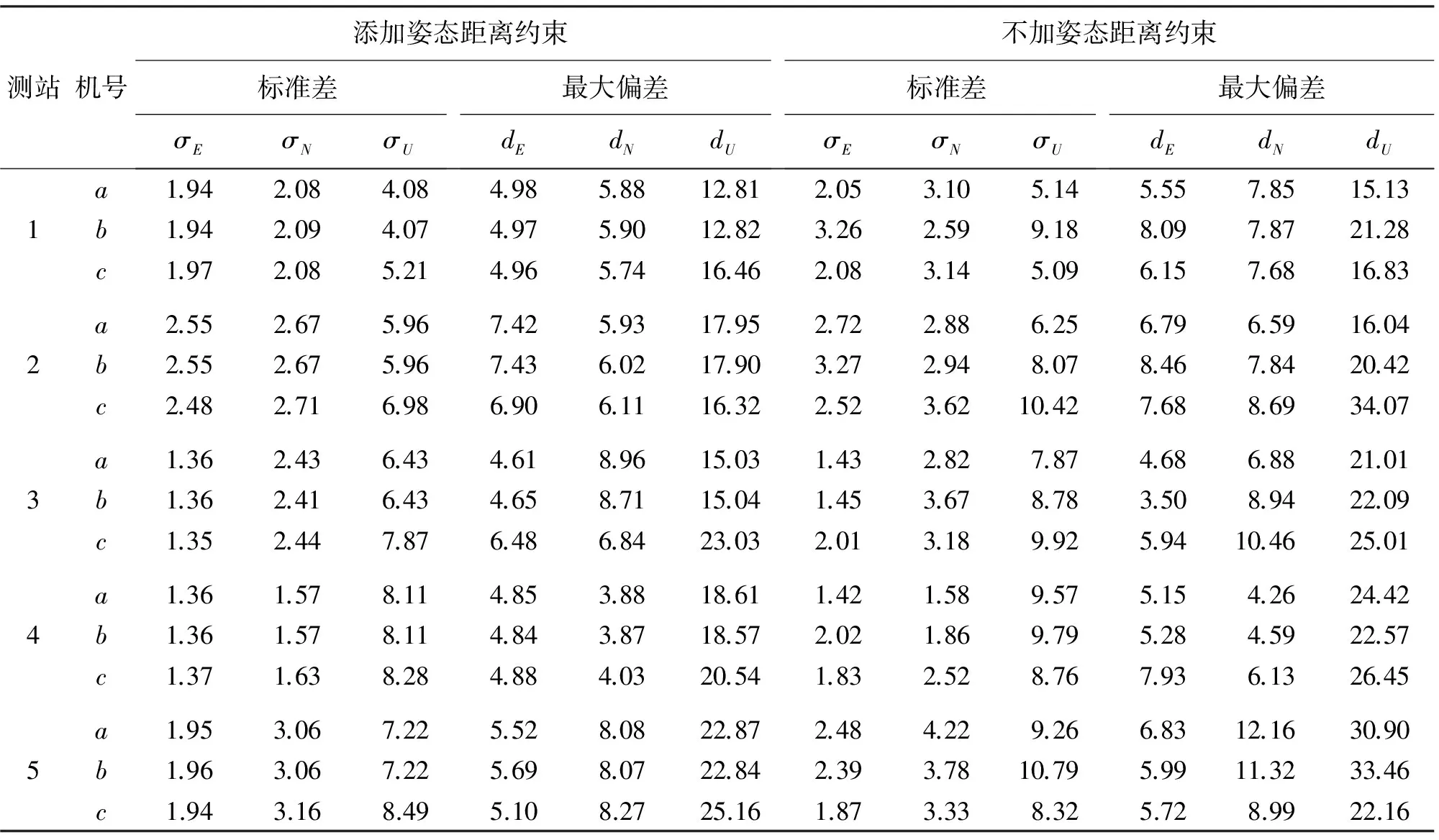
表4 添加距离姿态约束和不添加约束精度对比 mm
3 结束语
本文针对单历元解算精度不能保证且不够稳定的情况,利用3台GNSS接收机同时测量,同时附加距离和姿态观测量进行平差处理。利用这种方法,可以得到精度较高的点位坐标结果,其中,平面坐标最大偏差可以控制在10 mm以内,高程方向最大偏差在3 cm以内,较传统单历元算法有了较大的提高。可以看出,添加距离和姿态角观测量进行平差,可以有效地提高解算精度,是一种可行的方法。
[1] 李征航,张小红.利用GPS进行高精度变形监测的新模型[J].测绘学报,2002,31(3):206-210.
[2] 朱智勤.全球定位系统进行变形监测的新方法、模型及软件研究[D].武汉:武汉大学,2001.
[3] 韩慧群.GPS姿态测量系统研究与开发[D].哈尔滨:哈尔滨工程大学,2005.
[4] 霍夫曼.全球卫星导航系统[M].北京:测绘出版社,2009:209-228.
[5] 陈林.GPS姿态测量系统的研究[D].重庆:重庆大学,2007.
[6] 邵奎.北斗与GPS双系统测姿研究[J].测绘通报,2014(S1):219-223.
[7] 张宏兵,葛茂荣,过静珺.GPS姿态确定原理及软件设计[J].测绘通报,1999(12):27-29.
[8] 王潜心.机载GPS动态定位定速与定姿理论研究及软件开发[D].长沙:中南大学,2011.
[9] 误差理论与测量平差基础[M].武汉:武汉大学出版社,2007:146-147.
[10] 王唤良,李星照,段祝庚.通过GPS测量获得多种坐标数据[J].测绘通报,2003(8):29-32.
AGNSSBaselineNetworkAdjustmentMethodBasedonLengthandAttitudeMeasurements
BAI Zhengdong1,TANG Xiaoyu1,XIANG Wei1,2
(1. Institute of Geomatics, Department of Civil Engineering, Tsinghua University, Beijing 100084, China; 2. Engineering and Desinging Bureau of Airforce, Beijing 100076, China)
According to the fact that it takes a lot of time to obtain high precision results by single epoch algorithm, three GNSS receivers are erected on a carrier. The distance between the receivers are measured in advance, and the attitude angles of the carrier are measured by a gyroscope. Thus, the distance and attitude constraints are added to the baseline adjustment. Then a relatively stable and accurate result is achieved. The experiment results show that the maximum deviations are less than 10mm in the east and north directions, 30 mm in the elevation direction. The accuracy of the result is improved by more than 15% compared to the result without distance and attitude constraints.
GNSS; attitude constraints; distance constraints; network adjustment
P228
A
0494-0911(2017)01-0039-04
白征东,汤晓禹,项伟.基于距离和姿态观测量的GNSS基线网平差方法[J].测绘通报,2017(1):39-42.
10.13474/j.cnki.11-2246.2017.0009.
2016-01-31
白征东(1968—),男,博士,副教授,主要研究方向为大地测量、卫星导航和定位。E-mail:zbai@tsinghua.edu.cn