火炮模块药输送伺服系统自适应模糊滑模控制
2017-11-10岳才成钱林方孔建寿李颖
岳才成, 钱林方, 孔建寿, 李颖
(1.南京理工大学 机械工程学院, 江苏 南京 210094; 2.南京理工大学 自动化学院, 江苏 南京 210094; 3.西北机电工程研究所, 陕西 咸阳 712000)
火炮模块药输送伺服系统自适应模糊滑模控制
岳才成1, 钱林方1, 孔建寿2, 李颖3
(1.南京理工大学 机械工程学院, 江苏 南京 210094; 2.南京理工大学 自动化学院, 江苏 南京 210094; 3.西北机电工程研究所, 陕西 咸阳 712000)
针对火炮模块药输送伺服系统传动过程中存在参数时变和抖振等问题,设计了一种带有积分滑模函数的自适应模糊滑模控制器。采用自适应方法对系统时变参数进行估计,减小不确定部分对控制系统的影响。引入新型饱和函数代替传统切换函数,保证整个切换过程连续、平滑过渡;采用模糊自适应算法对切换系数在线调整,提高系统的鲁棒性能,进一步抑制切换过程中的抖振。实验结果表明,火炮模块药输送伺服系统在空载、半载和满载3种情况下均具有良好的位置跟踪性能,满足性能指标要求,提出的自适应模糊滑模控制算法能够克服负载变化对系统控制精度的影响。
兵器科学与技术; 火炮模块药输送伺服系统; 抖振; 自适应模糊滑模控制; 位置跟踪
0 引言
火炮模块药输送伺服系统是自行火炮自动装填系统的重要组成部分,包含显控终端、综合控制器、驱动器、永磁同步伺服电机、减速器、角编码器、传动轴、齿轮、传动链、药筒、选药机构和推药机构等组成,该系统具有齿轮传动和带传动的特点,大量装备在自动化程度高、可靠性高的特种装备上。由于系统安装位置空间狭小,较难维修,所以要求系统在运动过程中具备较高的可靠性、较好的定位精度等。系统在传动过程中,通过同步交流伺服电机作用在中间机构上,带动药筒完成回转动作;通过药筒回转,实现药筒从任意位置到达规定选药位,配合选药装置等完成选药任务;选药完成后,推药电机负责将模块药输送至输药机构上,等待后续动作。火炮模块药输送伺服系统在运动过程中的运动状态,以及定位精度对后续选药、推药等具有较大的影响。
火炮模块药输送伺服系统在旋转选药过程中,药筒中模块药的数量是随时可能发生改变的,随着模块药数量的变化,系统转动惯量、负载力矩、非线性摩擦等都在发生改变。由于参数的不断变化,很难确定系统精确的数学模型,在解决系统模型参数不确定控制问题方面,滑模变结构控制应用较为广泛。王昭磊等[1]考虑目标机动、建模误差和气动参数摄动等不确定性影响,设计了自适应模糊控制器,采用模糊逼近手段逼近不确定函数,应用模糊补偿方法补偿逼近误差及干扰,提高了系统的鲁棒性。文献[2]采用传统自适应模糊滑模及自适应PI控制算法完成了对感应直流伺服电机位置的控制,证明了所提出算法在解决伺服电机参数不确定、负载环境不确定、抖振问题和跟踪性能方面具有较好的效果。文献[3]针对武器大功率交流伺服系统所存在的大变负载、慢时变、强耦合的非线性特性和不确定扰动等问题,采用模糊小波神经网络间接自适应控制策略,有效地提高了整个系统的跟踪稳定性和响应快速性。李坤全等[4]针对焊接系统具有强耦合、非线性且建模困难的特点,提出了一种变论域自适应模糊PID复合的焊缝控制方法。仿真与实验结果表明,该方法可靠性好,抗干扰能力强,跟踪能力好,能够实现焊缝的精确跟踪。
滑模变结构控制通过对切换函数符号的判别,不断地切换控制量来改变系统的结构,使状态变量运动在已设定的切换面上。由于需要在不同控制逻辑间反复切换,这种切换会使系统产生抖振现象[5]。因此,火炮模块药输送伺服系统的控制要解决好模型参数不确定和抖振等带来的问题。
文献[6]针对旋转弹模型的非线性、强耦合和参数不确定性等问题,提出一种基于自适应反演和滑模控制理论的旋转弹体姿态控制律。该方法有效地抑制不确定气动参数和外部干扰的影响,使系统具有良好的稳定性和鲁棒性。文献[7]针对存在扰动、执行机构死区非线性以及系统不确定性的高超声速飞行器巡航飞行纵向通道模型,提出了带有新型非线性扰动观测器的递阶滑模控制器,有效降低了控制器增益,削弱了抖振,消除了执行机构死区特性对动态系统的影响。仿真结果表明,该控制策略对高超声速飞行器具有较好的控制作用。文献[8-14]提出了自适应模糊算法用以解决非线性系统参数不确定、扰动带来的抖振等问题,文献中所研究系统包含无抖振异步电动机控制、大型液压起竖系统、具有未知输出死区的非线性不确定、具有不稳定子系统的切换不确定非线性、单输入单输出非线性系统、状态延时的不确定非线性多输入多输出、位置伺服等系统,算法对该类非线性系统控制效果良好。Wai等[15]采用带有积分运算切换面的自适应模糊趋近策略,完成了对伺服驱动系统的精确鲁棒位置控制,将模糊滑模控制和自适应模糊滑模控制效果进行对比,结果表明后者具有较好的位置跟踪性能,控制过程更加平稳,有效地降低了抖振影响。
现今特种装备控制中,应用最多的控制策略仍为PID控制。传统PID控制算法缺少对模型非线性和参数不确定性的考虑,控制精度略低,运动的平稳性不好,较难获得理想的动态品质,在处理参数变化和扰动带来的影响方面效果欠佳[16-17]。火炮模块药输送系统和这些文献中所研究的对象结构差别较大,同时,该系统工作环境更为苛刻,性能要求更高,传统控制算法很难获得满意的动态品质。在文献资料的提示下,针对算法中对切换系数考虑不充分的现象,结合被控对象火炮模块药输送伺服系统负载非线性变化、存在扰动、控制精度要求高的特点,本文提出采用等效控制和切换控制相结合的控制策略,对等效转动惯量和阻尼系数参数采用自适应方式,降低负载非线性变化对系统稳定性的影响;同时对切换系数这个关键参数采用了模糊自适应方法进行在线估计,提高系统对参数非线性变化和扰动的不敏感性,提高系统的定位精度和鲁棒性,降低系统运动中的抖振和撞击。
1 系统控制模型
永磁同步电机采用d轴定子电流id=0的控制,电机转矩[18]定义为
Te=ktui,
(1)
式中:kt=pnψf为电机转矩常数,且kt>0,pn为电机的极对数,ψf为磁链;ui=iq为控制输入q轴电流(A),iq为q轴电流。
火炮模块药输送伺服系统为2阶系统,其系统动力学方程可以定义为

(2)

将(1)式代入(2)式,整理得到火炮模块药输送伺服系统动力学方程为
(3)
或
(4)
在实际的永磁同步电机伺服系统中,给定电机转子理论角位置θd,并完成对永磁同步电机控制电流ui的输入,就可获得实际转子角位置θ,其中θd和ui均有界,伺服系统跟踪误差越小,变化范围越小,控制效果越好。
本文的火炮模块药输送伺服系统要求为:能够跟踪给定的角位置轨迹;运动过程具有较好的稳定性,抖振控制在合理范围内;为保证电机输出轴经过减速装置后机构的末端误差控制在合理范围内,根据机构末端精度指标要求等效至电机输出轴的动态误差不大于±3.75 rad,稳定误差不大于±1.5 rad.
2 控制器设计
火炮模块药输送伺服系统角位置误差定义为
e=θd-θ.
(5)
采用PID积分型滑模函数为
(6)
式中:kP、kI、kD为待确定的参数,且kP>0、kI>0、kD>0.
由(3)式、(5)式和(6)式可知

(7)
等效控制律设计为
(8)
式中:ue为等效控制项;J0=J/kt;B0=B/kt.
设计切换控制为
us=ηsgn(s)+λs,
(9)
式中:us为切换控制项;η为切换系数,η>0;λ为指数项系数,λ>0;sgn(s)为符号函数,可以表示为
(10)
由(8)式和(9)式可知系统控制器为

(11)
将(11)式代入(7)式中,得
(12)
式中:Td0=Td/kt. 考虑定义如下Lyapunov函数:

(13)
将(13)式对时间求导可知:

(14)

由于火炮模块药输送伺服系统的负载是动态变化的,变化过程中等效转动惯量J和等效阻尼系数B的值发生非线性变化。因此,控制器(11)式中参数J0和B0的值也是非线性变化的,若采取赋予固定值的方法显然是不准确的。本文中采用自适应方法对该参量进行动态调节,实时适应运动过程。控制器设计为

(15)
由(7)式和(15)式可知

(16)
设计Lyapunov函数为
(17)

(18)

(19)
故选取自适应律为

(20)
选用饱和函数代替(10)式符号函数,饱和函数形式为
(21)
式中:Δ为饱和函数边界常数,Δ>0. 新型饱和函数用饱和特性代替了传统符号函数的继电特性,改善了切换过程中的不连续性。
切换控制中η值对控制的输出影响较大,如果η较小,趋近速度比较慢;反之η较大,趋近速度较大,当运动到切换面时,将会引起系统抖振。所以本文针对η值的大小,取滑模函数s的绝对值作为输入,模糊输出变量为η. 当滑模函数距离滑模面较远时,应提高趋近速度,故η应增加;当系统逼近滑模面时,应降低趋近速度,故η应减小。基于此原则引入模糊规则,模糊变量的隶属函数如图1所示,图中:s0、s1为待定参数,s0>0、s1>0;α1、α2、α3为模糊系统待设计自适应参量,Z、PM、PB为变量的模糊状态,PB为正大,PM为正中,Z为0.

图1 模糊系统的隶属度函数Fig.1 Membership function of fuzzy system
采用表1所示的模糊规则进行推理。

表1 模糊规则
采用重心法解模糊,得到模糊系统的输出η为
(22)
式中:ωi为模糊输入|s|在各模糊子集上的隶属度,且0≤ωi≤1,即ω1=μPB(s),ω2=μPM(s),ω3=μZ(s).

对参数αi采取自适应处理,即自适应估计值T=[1,2,3],可知
(|s|,)=()Tδ.
(23)
将(23)式代入(15)式,可得控制律为

(24)
考虑定义如下Lyapunov函数:
(25)

kDαTδs·sat(s)-kDλs2+kDTd0s.
(26)


(27)
由(26)式和(27)式可知

(28)
3 实验验证分析
火炮模块药输送伺服系统示意图如图2所示。系统包含显控终端、综合控制器、驱动器、永磁同步伺服电机、减速器、角编码器、传动轴、齿轮、传动链、药筒、选药和推药等执行机构。

图2 火炮模块药输送伺服系统控制框图Fig.2 Block diagram of artillery modular charge transport servo system
火炮模块药输送伺服系统精确定位控制实验中,上位机通过标准TCP/IP协议(以太网)与控制器完成控制信息和数据信息交互;控制器通过数据总线完成伺服电机控制电流的输出,并获取实际的电机转子角位置和角速度值;驱动器将控制输入的驱动电流作用在伺服电机上,伺服电机带动药筒完成运动。实验过程中采用预设理论运动轨迹的方式校验控制策略的控制效果,该方法通过比较测量输出的角位置值和理论规划的角位置值之间的差值,可直观地观测控制精度。理论运动轨迹如图3所示。
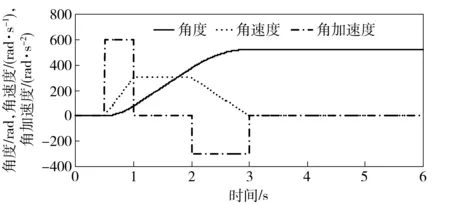
图3 预设理论运动轨迹Fig.3 Supposed theoretical motion track
参数选取:电机额定功率P=800 W,采样周期为0.004 s,总线通信波特率为500 kbit/s,kP=4.5,kI=40,kD=1,λ=0.5,Δ=1.5,s0=8,s1=20,γ1=1×10-6,γ2=1×10-6,γ3=0.01,J0的初始值设为2.02×10-3A·s2/rad,B0的初始值设为3.36×10-4A·s/rad.
实验中分别对火炮模块药输送伺服系统的满载、半载、空载3种状态进行了研究。图4为不同负载下的控制输入电流u,从空载(见图4(a))、半载(见图4(b))和满载(见图4(c))曲线可以看出:随着负载的加大,启动电流随之增加,伴随着跟踪误差的减小,控制电流逐渐趋于稳定,不同负载电流变化规律基本一致;整个过程中由于反馈信号导致测量噪声无法消除,使得过程中控制输入存在一定程度的波动,但该抖振未对系统控制性能造成影响;系统最终由于非线性摩擦等因素,控制电流稳定在一个值附近,进入稳定状态。

图4 系统控制输入电流uFig.4 Control inputs of the system
图5(a)、图5(b)和图5(c)为3种状态下的角位置跟踪误差e情况,反映了预设角度值和实际电机转子运动角位置的差值变化状况。在最初的自适应学习阶段,误差存在一个小高峰,但持续时间短,系统很快收敛到一个小的误差范围内,整个过程较为平稳,抖振较小,即使在空载、半载和满载参数范围变化的情况下,控制精度依然能够满足系统的功能性能要求,能够抵抗参数非线性变化和扰动带来的影响。3种负载下的最大动态跟踪误差分别为0.41 rad、0.95 rad、1.23 rad,稳定误差均在0.1 rad以内,控制精度远高于要求精度。

图5 系统角位置跟踪误差eFig.5 Angular position tracking errors of the system

图6 J0的估计值Fig.6 Estimated values of J0
图6~图10为不同状态下自适应参数的变化范围,从图中可以看到,在不同负载下,参数变化曲线是不同的,曲线最终都是收敛的。其中图8~图10为采取模糊算法获得的模糊自适应参数,由曲线可知,引入模糊算法获得了趋近速度参数的动态值,弥补了固定趋近参数值对系统鲁棒性能的影响,使系统获得了良好的性能和稳定性。
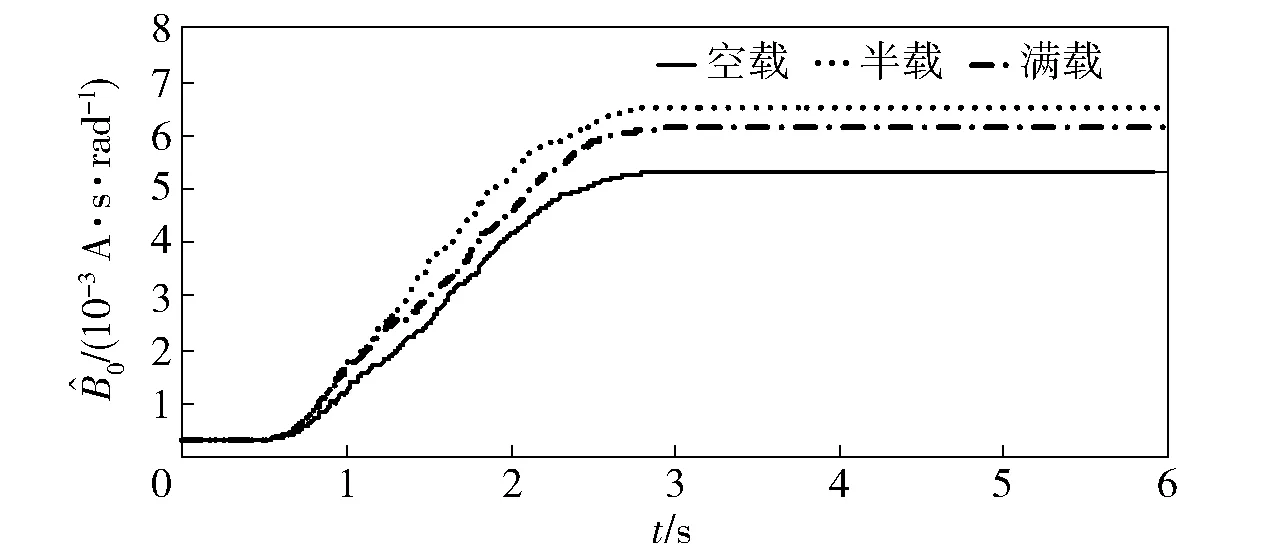
图7 B0的估计值Fig.7 Estimated values of B0
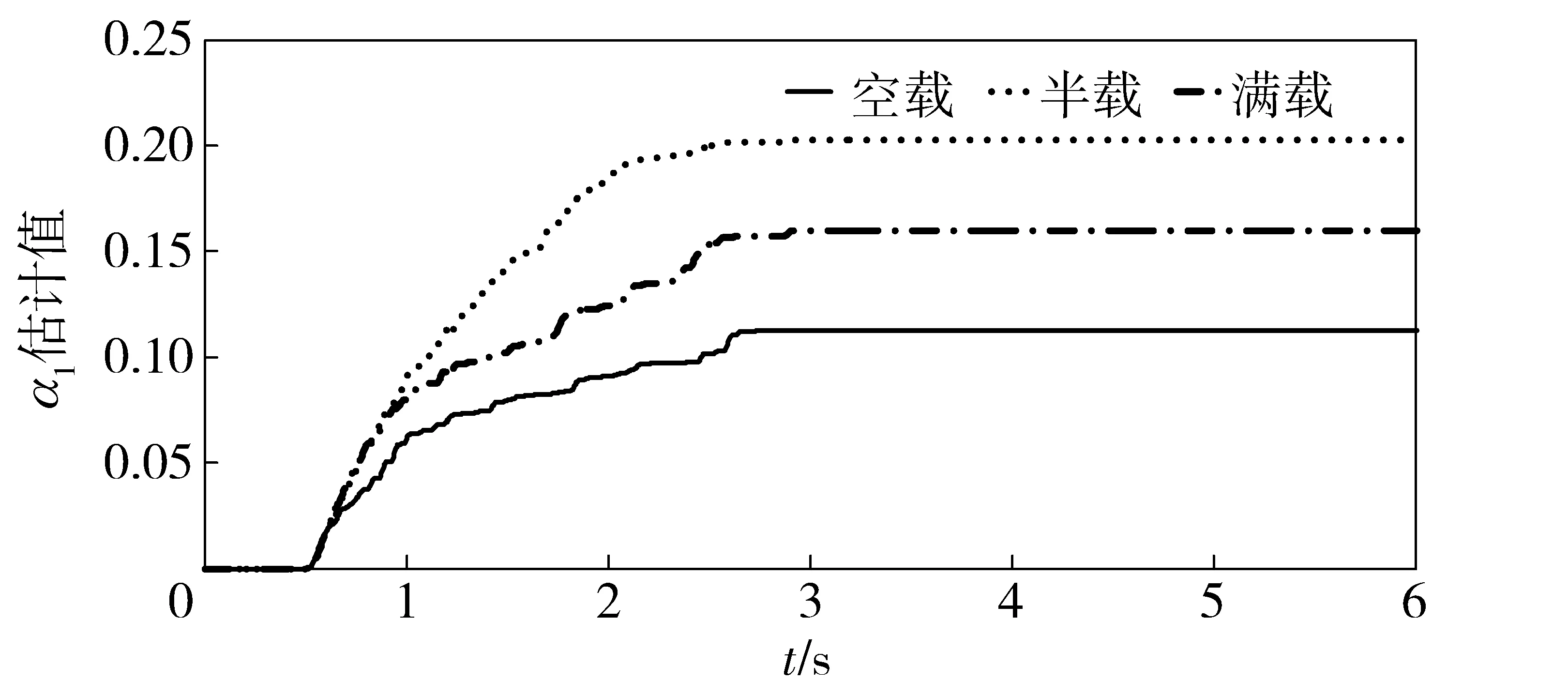
图8 α1的估计值Fig.8 Estimated values of α1
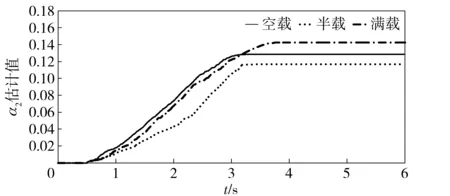
图9 α2的估计值Fig.9 Estimated values of α2
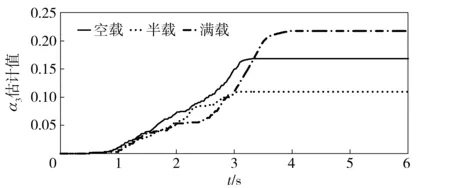
图10 α3的估计值Fig.10 Estimated values of α3
4 结论
本文根据火炮模块药伺服系统结构、运动特点和该类对象的控制现状,提出了采用自适应模糊算法以及新型饱和函数相结合的控制策略,分析了该策略解决负载变化和抖振等对系统控制精度的影响,进行了火炮模块药输送伺服系统精确定位控制实验,得到以下结论:
1) 控制策略对系统不同负载、参数变化是不敏感的,各种负载下均具有良好的位置跟踪精度,能够很好地跟踪给定的运动轨迹。
2) 系统动态误差和稳定误差均收敛在较小的范围,满足性能指标,为后续的模块药输送传递提供了保障。
3) 从实验结果可以看出,测量噪声的存在对被控对象运动造成一定程度的抖振。因此,通过分析处理测量噪声来降低抖振值得继续深入研究。
References)
[1] 王昭磊, 王青, 冉茂鹏, 等. 基于自适应模糊滑模的复合控制导弹制导控制一体化反演设计[J]. 兵工学报, 2015, 36(1):78-86.
WANG Zhao-lei, WANG Qing, RAN Mao-peng, et al. Integrated guidance and control backstepping design of blended control missile based on adaptive fuzzy sliding mode control[J]. Acta Armamentarii, 2015, 36(1):78-86. (in Chinese)
[2] Shahnazi R, Shanechi H, Pariz N. Position control of induction and DC servomotors: a novel adaptive fuzzy PI sliding mode control[J]. IEEE Transactions on Energy Conversion, 2008, 23(1):138-147.
[3] 侯润民, 刘荣忠, 高强, 等. 一种自适应模糊小波神经网络及其在交流伺服控制中的应用[J]. 兵工学报, 2015, 36(5):781-788.
HOU Run-min, LIU Rong-zhong, GAO Qiang, et al. Application of adaptive fuzzy wavelet neural network in AC servo control system[J]. Acta Armamentarii, 2015, 36(5):781-788. (in Chinese)
[4] 李坤全, 文睿. 焊接机器人焊缝模糊PID跟踪控制[J]. 控制工程, 2017, 24(2):351-354.
LI Kun-quan, WEN Rui. Fuzzy PID tracking control for welding robots [J]. Control Engineering of China, 2017, 24(2):351-354. (in Chinese)
[5] Hung J Y, Gao W, Hung J C. Variable structure control: a survey[J]. IEEE Transactions on Industrial Electronics, 1993, 40(1):2-22.
[6] 鲍雪, 王大志, 胡明. 基于自适应模糊的旋转弹反演滑模控制律设计[J]. 仪器仪表学报, 2016, 37(6):1333-1339.
BAO Xue, WANG Da-zhi, HU Ming. Backstepping sliding mode control design for spinning ammunition based on adaptive fuzzy method[J]. Chinese Journal of Scientific Instrument, 2016, 37(6):1333-1339. (in Chinese)
[7] 陈辰, 马广富, 孙延超, 等. 基于扰动观测器的高速声速飞行器递阶滑模控制[J]. 兵工学报, 2016, 37(5):840-850.
CHEN Chen, MA Guang-fu, SUN Yan-chao, et al. Recursive sliding mode control for hypersonic vehicle based on nonlinear disturbance observer[J]. Acta Armamentarii, 2016, 37(5):840-850. (in Chinese)
[8] Saghafinia A, Ping H W, Uddin M N, et al. Adaptive fuzzy sliding-mode control into chattering-free IM drive[J]. IEEE Transactions on Industry Applications, 2015, 51(1):692-701.
[9] 李良, 李峰, 冯永保, 等. 基于自适应模糊滑模的大型液压起竖系统控制策略研究[J]. 兵工学报, 2016, 37(1):71-76.
LI Liang, LI Feng, FENG Yong-bao, et al. Research on control strategy of large hydraulic erecting system based on adaptive fuzzy sliding mode[J]. Acta Armamentarii, 2016, 37(1):71-76. (in Chinese)
[10] Wang F, Liu Z, Lai G Y. Fuzzy adaptive control of nonlinear uncertain plants with unknown dead zone output[J]. Fuzzy Sets and Systems, 2014, 263:27-48.
[11] Long L J, Zhao J. Adaptive fuzzy tracking control of switched uncertain nonlinear systems with unstable subsystems[J]. Fuzzy Sets and Systems, 2015, 273:49-67.
[12] Ho H F, Wong Y K, Rad A B. Adaptive fuzzy sliding mode control with chattering elimination for nonlinear SISO systems[J]. Simulation Modelling Practiceand Theory, 2009, 17(7):1199-1210.
[13] Wu T S, Karkoub M, Chen H S, et al.Robust tracking observer-based adaptive fuzzy control design for uncertain nonlinear MIMO systems with time delayed states[J]. Information Sciences, 2015, 290:86-105.
[14] Ullah N, Wang S P, Khattak M I, et al. Fractional order adaptive fuzzy sliding mode controller for a position servo system subjected to aerodynamic loading and nonlinearities[J]. Aerospace Science & Technology, 2015, 43:381-387.
[15] Wai R J, Lin C M, Hsu C F. Adaptive fuzzy sliding-mode control for electrical servo drive[J]. Fuzzy Sets and Systems, 2004, 143(2):295-310.
[16] 郭亚军, 马大为, 王晓峰, 等. 交流伺服系统自适应反演滑模控制器设计[J]. 北京理工大学学报, 2010, 30(1):99-102.
GUO Ya-jun, MA Da-wei, WANG Xiao-feng, et al. Design of adaptive backstepping sliding mode controller in alternating current servo system[J]. Transactions of Beijing Institute of Technology, 2010, 30(1):99-102. (in Chinese)
[17] 姚来鹏, 侯保林. 随机振动机械臂的自适应鲁棒滑模控制[J]. 中国机械工程, 2016, 27(5):694-697.
YAO Lai-peng, HOU Bao-lin. Adaptive sliding mode control of robotic manipulators with external uncertain stochastic vibration[J]. China Mechanical Engineering, 2016, 27(5):694-697. (in Chinese)
[18] 陈明俊, 李长红, 杨燕. 武器伺服系统工程实践[M]. 北京:国防工业出版社, 2013:193-220..
CHEN Ming-jun, LI Chang-hong, YANG Yan. Weapon servo system engineering practice[M]. Beijing: National Defense Industry Press, 2013:193-220. (in Chinese)
AdaptiveFuzzySlidingModeControlfortheArtilleryModularChargeTransportServoSystem
YUE Cai-cheng1, QIAN Lin-fang1, KONG Jian-shou2, LI Ying3
(1.School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, Jiangsu, China;2.School of Automation, Nanjing University of Science and Technology, Nanjing 210094, Jiangsu, China;3.Northwest Institute of Mechanical Engineering, Xianyang 712000, Shaanxi, China)
An adaptive fuzzy sliding mode controller (AFSMC) with an integral sliding mode function is proposed for the control of the artillery modular charge transport servo system which has time-varying parameters and chattering problem. The time-varying system parameters are estimated by using adaptive method. The influence of model uncertainty on the control system is reduced. Then, the traditional switching function is replaced by an improved saturation function. This ensures that the process of switching is more continuous and smooth. The coefficient of switching is tuned online by the fuzzy adaptive scheme. In this way, the robustness of system is enhanced, and the chattering of system is restrained. Experimental results show the system has a good position tracking performance under empty-load, half-load and full-load, which can meet the performance index. The proposed AFSMC scheme can overcome the influence of variable loads on the control precision of the system.
ordnance science and technology; artillery modular charge transport servo system; chattering; adaptive fuzzy sliding mode controll; position tracking
2017-03-20
国家自然科学基金项目(11472137)
岳才成(1990—), 男, 博士研究生。 E-mail: yuecaicheng226@126.com
钱林方(1961—), 男, 教授, 博士生导师。 E-mail: lfqian@vip.163.com
TJ303+.3; TP273+.4
A
1000-1093(2017)10-1891-08
10.3969/j.issn.1000-1093.2017.10.003
