基于箱粒子滤波的鲁棒标签多伯努利跟踪算法
2017-11-10魏帅冯新喜王泉鹿传国
魏帅, 冯新喜, 王泉, 鹿传国
(1.空军工程大学 信息与导航学院, 陕西 西安 710077; 2.95806部队, 北京 100076)
基于箱粒子滤波的鲁棒标签多伯努利跟踪算法
魏帅1, 冯新喜1, 王泉1, 鹿传国2
(1.空军工程大学 信息与导航学院, 陕西 西安 710077; 2.95806部队, 北京 100076)
针对在未知杂波和检测概率的跟踪环境中标准的标签多伯努利(LMB)算法跟踪精度较低、粒子覆盖集过大致使复杂度较高的问题,引入区间分析技术,提出基于箱粒子滤波的鲁棒LMB跟踪算法。建立目标增广空间模型,基于箱粒子滤波方法,推导出有杂波状态标签和LMB元素标签的预测、更新方程,并用多目标箱粒子LMB滤波递推估计目标状态。仿真结果表明,当杂波和检测概率先验未知,与现有非标签、非鲁棒算法相比,所提算法可实现在低检测概率和高杂波强度环境下对目标的稳定跟踪,同时大幅度提高算法的运行效率。
控制科学与技术; 多目标跟踪; 区间分析; 标签多伯努利; 箱粒子; 鲁棒滤波器
0 引言
传统的目标跟踪算法需要对数据进行关联[1],工作量大,且在复杂未知的探测环境中跟踪性能下降。基于随机有限集(RFS)[2]的多目标跟踪方法因无需关联而受到广泛应用。文献[3-4]分别提出概率假设密度滤波算法和势概率假设密度滤波算法。文献[5-6]分别提出传播多伯努利有限集参数的多目标多伯努利(MeMBer)滤波器和势平衡多伯努利(CBMeMBer)滤波算法,提高了目标跟踪性能。但上述方法无法保证在高杂波或低检测概率的环境下较稳定地跟踪,为解决此问题,文献[7-9]将RFS理论和多假设跟踪滤波相结合,提出标签多伯努利(LMB)算法,并用序贯蒙特卡洛(SMC)算法实现,但SMC-LMB滤波器计算量庞大。文献[10]将多模型与LMB算法结合,实现对机动目标的跟踪。文献[11]将LMB算法运用到检测前跟踪算法中,实现多弱小目标跟踪,但均存在算法运行时间较长的问题。此外,上述方法都设定杂波和检测概率参数先验已知,而实际中,这些参数通常未知,且探测环境较为恶劣。文献[12]基于CBMeMBer算法提出鲁棒多伯努利滤波器,实现在未知杂波和检测概率的条件下的目标跟踪,但该算法在低检测概率环境下跟踪效果不佳。文献[13]在文献[12]的基础上结合传感器选择方法,提高目标跟踪精度,但运算复杂度较高,算法效率低下。
为了降低粒子滤波的运算复杂度,文献[14]提出了基于SMC和区间分析[15]的箱粒子滤波算法。文献[16]将箱粒子滤波和CBMeMBer算法相结合,提出Box-CBMeMBer滤波器,但是依旧对跟踪环境的理想度要求较高。
针对上述问题,本文基于未知杂波和检测概率的复杂跟踪环境,提出基于箱粒子滤波的鲁棒LMB跟踪(Box-R-LMB)算法。首先构建增广空间模型,定义检测概率空间,增加随机集元素标签和包含真实目标与杂波的状态标签,放松传统服从泊松分布的杂波前提条件;其次利用区间分析技术递推目标的全概率分布,估计目标状态。实验表明,所提算法在未知杂波和检测概率的复杂跟踪环境中的鲁棒性较好,在低检测概率和高杂波强度的探测环境中可实现对多目标的较准确跟踪,同时有效地减少算法计算时间。
1未知杂波和检测概率条件下跟踪问题描述
1.1 空间模型建立
在未知杂波和检测概率的跟踪环境中,常规的目标空间模型会导致真实目标与杂波(虚警)无法区分,无法实现在未知杂波和检测概率环境下的目标准确跟踪,因此将目标状态空间扩展为增广空间[9],反映真实目标和杂波两部分信息。考虑将未知的检测概率视为一个目标状态变量,具备常规运动状态量特性,且与其余运动状态量独立。定义增广空间数学式为
Υ=Υ(Θ)×Υ×{0,1} ,
(1)
式中:Υ(Θ)=[0,1]为检测概率空间;Υ∈R为运动状态空间;{0,1}为离散的目标空间;×为笛卡尔积符号。为方便阐释,加入状态标签变量u,u=0表示杂波,u=1表示真实目标。同时定义增广状态变量:=(a,x,u),其中a、x、u分别为增广量、运动量与状态标签量。
1.2未知杂波和检测概率条件下的鲁棒LMB算法
随机集中的各变量是无顺序的,将各元素赋予元素标签是解决该问题的有效方法。在未知杂波和检测概率的跟踪环境中,鲁棒LMB(R-LMB)算法将增广状态扩展为={(i,li)}={(a,xi,u,li)},且i=1,2,…,||,xi∈Υ为目标状态,l∈L为独立于目标状态的元素标签,L为元素标签空间,||为集合元素数。
1.2.1 预测
未知环境下R-LMB的RFS分布为
(2)
预测的多目标密度由存活目标和新生目标两部分组成。新生目标分布为
(3)
式中:Bk为新生目标的元素标签空间,且满足条件Bk∩Bk-1=∅,则可得预测分布为

(4)
(5)
(6)

1.2.2 更新

(7)
(8)

(9)
(10)
式中:1(·)表示指示函数,其定义式为
(11)
F(·)为子空间划分函数;Ξ(I)为关联集合;ζ∈Ξ(I)表示标签与量测的关联,I→{0,1,2,…,|Zk|},0表示无量测值,当ζ(l)=ζ(l′)>0时具有关联唯一性;R-LMB过程的权值分布wu,I,ζ(Zk)满足:

(12)
(13)

(14)

1.2.3 目标状态估计
(15)
2未知杂波和检测概率条件下基于区间分析的R-LMB滤波实现
在未知杂波和检测概率的跟踪环境中,由于量测集具有较强的不确定性,为精确地拟合目标量测值并获得更准确的目标状态估计,需要较大的后验密度支撑集,从而导致覆盖状态空间的粒子数目较多,使得算法效率低下。因此考虑将箱粒子滤波算法引入未知杂波和检测概率的跟踪环境,提出基于区间分析的Box-R-LMB算法,以提高在未知杂波和检测概率环境下的算法执行速度。
2.1 初始化

(16)

2.2 预测
假设k-1时刻多目标的粒子后验分布表达式为
(17)
(18)

(19)
).
(20)
由k-1时刻的区间量测得到新生箱粒子,记区间量测集为Φk,对每个[z]∈Φk,都产生Bk个箱粒子。存活目标的概率密度为
(21)

(22)
(23)
式中:fΘ,u,k|k-1(a|·)为k时刻检测概率转移密度;fΦ,u,k|k-1([x]|·)为k时刻目标状态转移密度。
新生目标的概率密度为
(24)

(25)
(26)
2.3 更新

(27)
(28)

(29)

(30)

(31)
(32)
2.4 约束箱粒子

(33)
2.5 轨迹修建与重采样
在Box-R-LMB算法中,表示后验多目标密度的粒子随时间增加会无限增长,因此需要删除存在概率小于门限值的假设轨迹。同时需重采样修剪后的假设轨迹的粒子,根据箱粒子在重采样中的复制次数,划分箱粒子,从而减少粒子退化。
2.6 多目标状态提取
(34)
(35)
3 仿真实验与结果分析
为验证算法的有效性和可行性,将SMC-LMB算法、鲁棒SMC-LMB(SMC-R-LMB)算法和Box-R-LMB算法进行选择组合比较。
3.1 实验参数设定
真实目标存活概率pS,1,k=0.98,真实目标的检测概率转移密度服从β分布[17],即fΘ,1,k|k-1(ak|ak-1)=β(ak;s1,k|k-1,t1,k|k-1),其中均值μa,1,k|k-1=ak-1,标准差σa,1,k|k-1=0.01.β分布参数设置为:s1,k|k-1=μa,1,k|k-1·(μa,1,k|k-1(1-μa,1,k|k-1)/[σa,1,k|k-1]2-1),t1,k|k-1=(1-μa,1,k|k-1)·(μa,1,k|k-1(1-μa,1,k|k-1)/[σa,1,k|k-1]2-1).
杂波其转移密度与ak和目标位置xL=[x,y]有关;杂波检测概率转移密度fΘ,0,k|k-1(ak|ak-1)服从β分布,σa,0,k|k-1=0.07;杂波存活概率pS,0,k=0.9. 其余参数设置与文献[11]相同。
3.2 实验结果与分析
在未知环境下,既要估计目标数目,同时需要估计目标的各自状态,因此选用最优子模式分配(OSPA)距离作为评价准则指标[18],它包括位置和集合势两部分距离,其中距离敏感性参数p表征距离误差,水平调节数c表征集合势误差。其定义式为

(36)
d(c)(x,y)=min(‖x-y‖,c),
(37)
式中:X、Y为任意子集,且维数分别为m、n. 本实验选取参数c=200,p=2.
对每个区间量测,取滤波持续粒子数为2 000,新生粒子数500;箱粒子滤波的持续粒子数为40,新生粒子数为1. 分别对不同算法在100次蒙特卡洛实验条件下进行仿真比较,并分析运行时间结果。区间分析工具采用INTLAB工具箱。

图1 真实航迹与量测值Fig.1 Target trajectories and measured values

考虑基于未知杂波和检测概率环境的仿真环境,分别取不同的目标检测概率pS,1,k、pS,0,k,以及杂波强度η值进行比较实验,假设在同场景内η基本不变。假定理想条件为:pS,1,k=pS,0,k=0.99,η=10;高杂波强度为η=50,低检测概率为pS,1,k=pS,0,k=0.82.

图2 3种算法在不同条件下的目标数估计Fig.2 Estimation of target number by three algorithms
图2表示Box-R-LMB算法、SMC-R-LMB算法和SMC-LMB算法在3种环境下的目标数目估计能力,可以看出所提算法较真实值最为接近,SMC-R-LMB算法次优,而没有鲁棒信息的SMC-LMB算法效果最差,说明所提算法不仅可以在理想环境中有优良的性能,同时在高杂波和低检测概率的条件下同样可以实现对目标数目的稳定估计。
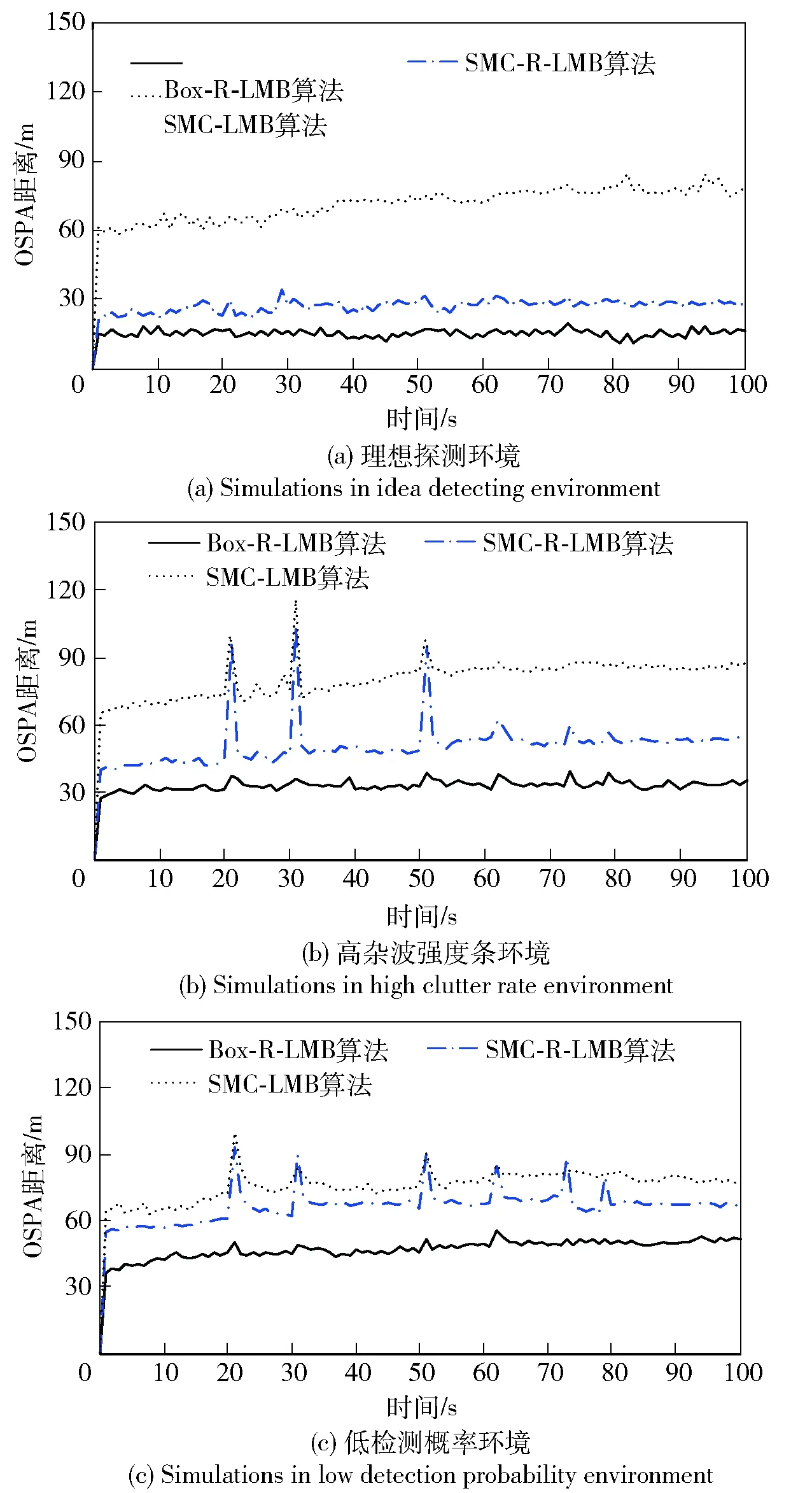
图3 3种算法在不同条件下OSPA距离值Fig.3 OSPA distances of three algorithms
图3对比了3种算法在3种环境中的OSPA距离大小。由图3(a)可知,所提算法OSPA距离值明显小于另两种,这是因为本文算法中的目标有两类,即“杂波”和“真实目标”,并分别添加标签加以区分,同时将检测概率量看做目标运动状态,从而在未知杂波和检测概率的条件下仍可稳定跟踪。由图3(b)可知,因所提算法在高杂波强度下缺少杂波的先验知识,故在目标数变化处产生较高峰值,但对比而言,OSPA距离值始终最小,表明跟踪性能相对突出。由图3(c)可知,因为较低的检测概率会导致漏警频率增高,使得OSPA距离值偏差总体变大,但R-LMB算法用多帧的量测信息进行概率假设,提高了算法的鲁棒性,误差值较为平稳,精度较高。
表1给出3种滤波算法的运行时长比较。由于SMC-R-LMB算法增加对未知环境的分析,所以比SMC-LMB算法耗时稍长,而基于区间分析的Box-R-LMB算法比另两种算法耗时减少10倍左右。这是因为本文算法所需的箱粒子数远远少于其余两种算法。后两者需要2 500个粒子,用来捕获新生目标的粒子数目庞大,导致运行时间增加;而前者基于箱粒子滤波的改进算法虽在区间分析上花费了部分时间,但只需41个箱粒子就可达相似的精度,粒子数目的大量减少使得算法在整体上实现了运行时间的大幅度降低,大大提高了算法效率。

表1 3种算法的运行时间比较
4 结论
针对未知杂波和检测概率环境下跟踪精度低、运行时间长等问题,提出了Box-R-LMB算法,将区间分析技术和LMB算法相结合,无需限定杂波和检测概率先验模型,将杂波与真实目标独立添加状态标签,分别进行二者状态的迭代更新;同时,算法利用多目标箱粒子LMB滤波递推估计目标状态。通过与非标签非鲁棒等现有算法相比,所提算法可以在未知杂波和检测概率的环境中,更精准地估计目标数目和状态信息,并在低检测概率和高杂波强度环境下,具有更好的多目标跟踪性能;在保证跟踪精度的同时,有效减少了算法的运行时间,降低了算法复杂度。
References)
[1] Hue C, Cadre J L, Perez P. Sequential Monte Carlo methods for multiple target tracking and data fusion[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 309-325.
[2] Mahler R. Engineering statistics for multi-object tracking.[J] Signal and Data Processing of Small Targets, 2001, 4473:53-60.
[3] Mahler R. Multi target Bayes filtering via first-order multi target moments[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4):1152-1178.
[4] Mahler R. PHD filters of higher order in target number[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4):1523-1543.
[5] Vo B T, Vo B N, Cantoni A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations[J]. IEEE Transactions on Signal Processing, 2009, 57(2): 409-423.
[6] Mahler R. Statistical multisource multitarget information fusion[M]. Boston, MA, US: Artech House, 2007.
[7] Vo B T, Vo B N. Labeled random finite sets and multi-object conjugate priors[J]. IEEE Transactions on Signal Processing, 2013, 61(13): 3460-3475.
[8] Reuter S, Vo B T, Vo B N, et al. The labeled multi-Bernoulli filter[J]. IEEE Transactions on Signal Processing, 2014, 62(12): 3246-3260.
[9] Vo B T, Vo B N, Phung D. Labeled random finite sets and the Bayes multi-target tracking filter[J]. IEEE Transactions on Signal Processing, 2014, 62(24):6554-6567.
[10] 邱昊, 黄高明, 左炜, 等. 多模型标签多伯努利目标跟踪算法[J]. 系统工程与电子技术, 2015, 37(12): 2683-2688.
QIU Hao, HUANG Gao-ming, ZUO Wei, et al. Multiple model labeled multi-Bernoulli filter for maneuvering target tracking[J]. Systems Engineering and Electronics, 2015, 37(12): 2683-2688.(in Chinese)
[11] 李淼, 龙云利, 李骏, 等. 基于标签多伯努利滤波器的机动小目标检测前跟踪[J]. 红外与毫米波学报, 2016, 35(5): 625-633.
LI Miao, LONG Yun-li, LI Jun, et al. Track-before-detect for maneuvering small targets based on labeled multi-Bernoulli filter[J]. Journal of Infrared and Millimeter Waves, 2016, 35(5): 625-633.(in Chinese)
[12] Vo B T, Vo B N, Hoseinnezhad R, et al. Robust multi-Bernoulli filtering[J]. IEEE Journal of Selected Topics in Signal Processing, 2014, 7(3): 399-409.
[13] Amirali K, Reza H, Alireza B. Multi-Bernoulli sensor-selection for multi-target tracking with unknown clutter and detection profiles[J]. Signal Processing, 2016, 119(C): 28-42
[14] Abdallah F, Gning A, Bonnifait P. Box particle filtering for nonlinear state estimation using interval analysis[J]. Automatica, 2008, 44(3): 807-815.
[15] Hargreaves G. Interval analysis in Matlab [D]. Manchester, UK: University of Manchester, 2002: 416-420.
[16] Zhao X G, Song L P.Box-particle implementation for cardinality balanced multi-target multi-Bernoulli filter[C]∥IEEE China Summit and International Conference on Signal and Information Processing. Beijing: IEEE, 2013.
[17] Olea R A. On the use of the beta distribution in probabilistic resource assessments[J].Natural Resources Research, 2011, 20(4): 377-388.
[18] 刘伟峰, 文成林. 随机集多目标跟踪性能评价指标比较与分析[J]. 光电工程, 2010, 37(9):14-26.
LIU Wei-feng, WEN Cheng-lin. Performance comparison and analysis of multitarget tracking indices based on random set[J]. Opto-Electronic Engineering, 2010, 37(9):14-26. (in Chinese)
RobustLabeledMulti-BernoulliTrackingAlgorithmBasedonBoxParticleFiltering
WEI Shuai1, FENG Xin-xi1, WANG Quan1, LU Chuan-guo2
(1.Information and Navigation College, Air Force Engineering University, Xi’an 710077, Shaanxi, China; 2.Unit 95806 of PLA, Beijing 100076, China)
The standard labeled Bernoulli (LMB) filter cannot guarantee a higher tracking performance, and multitude number of particles leads to the longer operation time of algorithm under the conditions of unknown clutter and detection probability. A robust labeled multi-Bernoulli algorithm based on box particle filtering is proposed. An augmented state space model is established, and the prediction and update state recursion equations with clutter state labels and LMB element labels are derived based on box particle filtering. The state of multi-target is recursively estimated using LMB filter box particles. Simulation reveals that the proposed algorithm has a better performance in target tracking under the conditions of unknown clutter and detection probability, and dramatically reduces the computation time with higher tracking accuracy under the conditions of lower detection probability and higher clutter ratet compared with the conventional algorithm with non-label and non-robustness.
control science and technology; multi-target tracking; interval analysis; labeled multi-Bernoulli; box particle; robust filter
2017-03-20
国家自然科学基金项目(61571458); 陕西省自然科学基金项目(2011JM8023)
魏帅(1993—),女,硕士研究生。E-mail:swei@stu.xidian.edu.cn
冯新喜(1962—),男,教授,博士生导师。E-mail: tear0419@qq.com
TN953+.6
A
1000-1093(2017)10-2062-07
10.3969/j.issn.1000-1093.2017.10.024
