干果点黏机构的研究
2017-09-22黄菊生
黄菊生
刘军安
唐唤清
(湖南工程学院机械工程学院,湖南 湘潭 411104)
干果点黏机构的研究
黄菊生
刘军安
唐唤清
(湖南工程学院机械工程学院,湖南 湘潭 411104)
干果点黏机由多自由度运动机构组成,包括X、Y、Z直线运动机构、手臂的俯仰运动机构、矩阵点黏机构和载物台旋转运动机构。该结构设计便于将干果多角度黏附于各种形状的糕点表面上。其关键部件矩阵点黏机构,设计采用3×3 矩阵点黏盘结构,9个能独立运行的点黏头按矩阵方式安装在点黏盘内,可同时对多个点进行点黏。点黏头的执行机构点黏针由电磁机构驱动取放干果,点黏头整体由电机和丝杆螺母传动机构驱动,控制其伸缩运动,实现在曲面糕点表面进行多点干果的柔性点黏造型。
干果;矩阵点黏机构;点黏针;运动控制;曲面
干果点黏机是将各种可食用干果(如杏仁、核桃仁、花生、葡萄干等)点黏到成型糕点上,其创作思路来源于五谷粮食画技术[1]。粮食画是一种利用五谷杂粮为原料经过手工制作工艺创作而成的平面点黏图画,而食品干果点黏机则是采用机械手自动将干果点黏到立体糕点上,使干果按照设计的图案黏附于曲面的糕点表面,从而制作出造型各异的三维艺术糕点[2]。目前,市场上还没有类似的干果糕点加工设备,糕点上一些点缀的果脯等大多是手工取放点黏,为此,综合应用机械、自动控制、CAD/CAM、曲面反求等多项技术[3-4],创新设计能高效、自动点黏各种食用干果的糕点加工设备,本试验主要对其关键部件矩阵点黏机构的设计引进、结构特点及点黏头、点黏针的运动控制方法进行研究[5-9]。
1 干果点黏机的系统组成
干果点黏机的机械结构主要由Y轴移动副、Z轴移动副、X轴移动副(手臂)、点黏头(执行器)、旋转载物台五部分组成,见图1。Y、Z、X轴及点黏头构成移动式直角坐标机械手,该机械手的空间运动是3个相互垂直的直线运动,与关节型机械手比较具有结构简单、成本低、容易编程,而且空间直线运动易于实现全闭环位置控制,可以达到较高的控制精度。整机能实现多自由度运动控制,即X、Y、Z方向的直线运动,手腕绕手臂的俯仰运动(点黏头俯仰运动)和载物台旋转运动。
整个机械手在地面上通过一直线导向机构和滚珠丝杆螺母机构带动沿Y轴做直线运动,Z轴在电机的驱动下通过丝杆螺母副带动手臂架和手臂做上下升降运动,X轴手臂架上电机通过滚珠丝杆螺母带动手臂做往复运动,手腕部通过电机驱动以及锥齿轮带动点黏头做俯仰运动,载物台的旋转由电机通过一级锥齿轮带动。多自由度结构用于将干果多角度黏附于各种形状的糕点表面上,也可以是以上运动的复合运动,实现多自由度运动控制、干果的多角度点黏[10]。

图1 干果点黏机组成
2 点黏头结构设计
2.1 矩阵点黏机构
点黏头为点黏设备的执行机构,是本系统中的关键部件。设计采用3×3矩阵点黏盘结构,由9个能独立运行的点黏头组成,按矩阵方式安装在点黏盘内构成点黏机构,可以对多个点同时点黏,以适应大面积的干果镶嵌,提高生产效率。矩阵点黏机构的结构见图2、3。
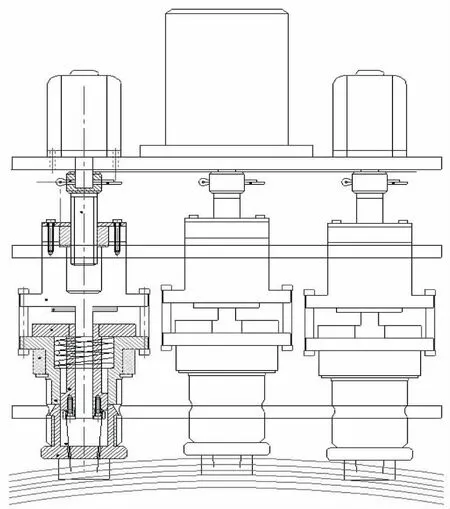
图2 矩阵点黏机构

图3 矩阵点黏机构三维模型
矩阵点黏机构中的9个点黏头结构完全相同,用电机电磁驱动,能独立控制运行。每个点黏头采用步进电机驱动丝杆螺母传动机构,其伸缩量可精确控制。采用这种结构既可以实现大面积、曲度比较小的工作面干果多点镶嵌,也可以通过对每一个点黏头的单独控制,实现各种特殊部位的干果点黏,及在复杂曲面的糕点表面进行干果的柔性点黏艺术造型。
2.2 点黏头结构
点黏头的结构见图4、5,主要由步进电机、丝杆螺母传动机构、电磁机构、点黏针头机构组成。其结构特点为:
(1) 针对不同种类的干果可以用机械手抓取,也可以用吸盘吸附等方式[11]。本设计采用点黏针扎取的方式抓取干果,其结构设计借鉴斜拉拔模运动结构。抓取针设计为3根,针与点黏头轴线呈5°,抓取牢固。
(2) 挡板设计为卡扣的结构,可以方便挡板的加工以及点黏针的安装。
(3) 为了让点黏针能够迅速取放干果,设计采用电磁线圈吸引衔铁作为点黏针的驱动,一方面控制方式简单,电磁铁通断电即可,另一方面结构简单,安装方便。
(4) 由于干果点黏精度比机床低,故采用丝杠螺母副对单个点黏头进行伸缩调节,此外丝杆螺母副具有自锁功能,在点黏头旋转移动时,可防止结构脱落,简化了点黏头结构。
(5) 点黏头由步进电机和丝杆螺母传动机构驱动,伸缩行程可调范围为0~20 mm。点黏针由电磁机构驱动,伸出长度为5 mm,能满足大多数体型干果的取放。
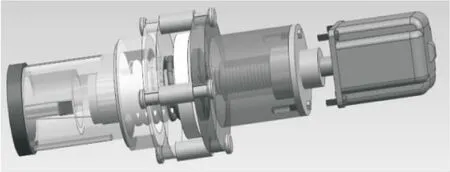
图4 点黏头三维模型
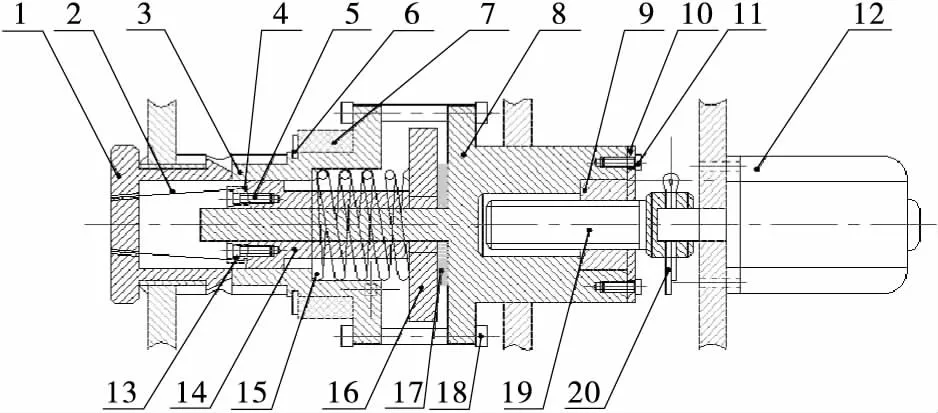
1. 挡板 2. 针头 3. 导套 4. 导针轮 5. 螺栓 6. 电磁铁挡板 7. 电磁铁线圈 8. 导轨 9. 螺母 10. 端盖 11. 紧固螺栓 12. 步进电机 13. 载针块 14. 推进杆 15. 弹簧 16. 衔铁 17. 垫片 18. 卡扣 19. 丝杠 20. 开口销
图5 点黏头结构
Figure 5 Structure of point stick head
3 点黏头的运动控制
3.1 点黏头的控制
每个点黏头有相应的电机驱动,通过给电机通断电、正反转及脉冲数等控制信号,可单独控制点黏头的运动。当电机12带动丝杠19旋转,驱动丝杆螺母副,在螺母9的带动下,点黏头能定量伸缩,其伸缩量由电机的脉冲数决定。当每个点黏头的伸缩量按一定的数据形成输出时,可组成各种曲率不同的曲面,从而在曲率较小的三维曲面上能达到高效率的点黏[12]。
3.2 点黏针的控制
点黏针的进出完成点黏过程中的取干果与点黏干果的动作,是点黏头的执行元件。通过机械手臂的控制,点黏针到达预定的取干果位置后,伸出针头,完成取干果动作。针头的伸缩通过电磁线圈的得电与失电控制。如图5,在点黏头结构中,当电磁铁线圈7通电时,吸引衔铁16沿导轨8运动,压缩弹簧15,推进杆14在衔铁的带动下沿导套运动,此时针头2完成一次伸出动作,达到取干果的目的。取干果后,机械手运动带动点黏头到达糕点点黏位置,线圈7断电,弹簧15复位,带动衔铁16、推进杆14复位,针头2收回,完成点黏过程。
点黏的运动控制过程:① 点黏准备,判断点黏头是否回原点,进行回原点操作,见图6(a)左;② 电磁铁得电,吸引衔铁,带动针扎取干果,见图6(a)右;③ 机械手带动点黏头,将干果压入糕点,见图6(b)左;④ 电磁铁失电,针收回,见图6(b)中;⑤ 电机回原位,等待信号,见图6(b)右。

图6 点黏头取放干果位置变化
3.3 点黏头的点黏方式
点黏干果的取放参考了真空吸附原理,并在此基础上进行设计改进,采用矩阵盘针头结构而不是真空吸盘结构,能适应不同种类干果的黏取与点黏。对于圆形干果,点黏时可以只考虑其在空间的位置,不考虑其姿态。对于非圆形干果,点黏时不但要考虑其在空间的位置,而且要考虑其姿态。干果的点黏方式见图7。
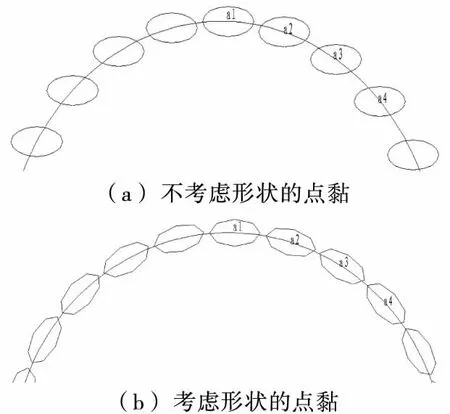
图7 干果点黏方式
对于不考虑形状的点黏方式,所有干果方向一致,容易实现多点同时点黏,效率较高。对于考虑形状的点黏方式,所有干果方向不同,只能采用单个点黏,效率较低,点黏头的控制复杂。考虑到设备的通用性及生产效率,本点黏机构的设计采用不考虑形状的点黏方式。
4 结束语
干果种类多,形状各异,要适应不同干果的点黏需要对干果进行分拣,以及采用不同的点黏头。对要考虑干果位姿的精美糕点点黏,造型更加复杂,其点黏头的设计和控制要求更高。本设计只是其中一种点黏方案和相关机构的创新设计,整体结构新颖独特,对类似设备的设计开发具有很好的参考价值。
[1] 曾金. 唐大焱. 创作五谷粮食画的后起之秀[J]. 百姓生活, 2016(11): 44-45.
[2] 胡兴军, 子萌. 我国食品机械发展综述[J]. 食品科技, 2004, 26(4): 18-20.
[3] 杨传华, 樊文武, 魏天路, 等. 基于Pro/E的二次开发工具Pro/TOOLKIT的几个关键技术[J]. 佳木斯大学学报, 2006, 16(3): 25-28.
[4] 房丽娜, 郭陪全. Pro/E的二次开发与应用[J]. 济南大学学报, 2007, 2(2): 46-50.
[5] 黄辉先, 文美纯. 多自由度机械手 PLC 控制[J]. 机床与液压, 2001(5): 92-94.
[6] 王丰元, 李兰, 李震, 等. 旋转式多工位自动干果包装机的设计[J]. 机械与控制, 2017, 33(1): 76-80.
[7] 何崇东, 秦海辰, 黄永安. 片状脆性材料拾放机械手控制系统设计与实现[J]. 现代制造工程, 2013(5): 131-135.
[8] 张步阳, 梅爽, 陈伟, 等. 基于机器视觉的燃料电池 MEA 贴片方案设计[J]. 现代制造工程, 2014(4): 98-102.
[9] 余汉平, 赵庆辉, 马东. 柔性冲压生产线自动输送设备设计[J]. 机床与液压, 2013, 41(14): 29-32.
[10] 黄菊生, 刘军安, 李建军, 等. 食品数控点粘机的研究[J]. 制造业自动化, 2012, 34(10): 89-91.
[11] 滕红华. 真空吸盘吸持物体的动力学分析[J]. 包装工程, 2004, 25(2): 68-69.
[12] 张超. 自由曲面的造型及数控加工[D]. 西安: 西安理工大学, 2001: 23-35.
The study on dried-nuts point stick mechanism
HUANGJu-sheng
LIUJun-an
TANGHuan-qing
(CollegeofMechanicalEngineering,HunanInstituteofEngineering,Xiangtan,Hunan411104,China)
Dried-nuts point stick machine is composed of multi-free degree movement mechanisms, including theX,Y, andZlinear motion one, the arm pitching motion one, the matrix point stick one and the objective table rotation motion one. This structure was designed for dried-nuts adhesion to the surface of the various shape cakes with multi-angle. The matrix point stick mechanism (its key components) designed to be a 3×3 matrix point stick plate structure, and nine point stick heads with running independently were installed in a point stick disc in the matrix way, with the point stick function of multiple points meanwhile. The point stick needles (point stick head executing mechanism) driven by electromagnetic mechanism were used to take and put Dried-nuts. The point stick head was driven overall by a motor and screw nut transmission mechanism to control its telescopic movement, implementing multiple point flexible point stick model of dried-nuts in curved surface cakes.
dried-nuts; matrix point stick mechanism; point stick needles; motion control; curved surface
湖南省科技厅科技计划资助项目(编号:2011GK3142)
黄菊生(1960—),男,湖南工程学院教授,硕士。 E-mail:huang8233@163.com
2017—04—01
10.13652/j.issn.1003-5788.2017.07.020