带襟翼的飞行器非线性控制系统分析和设计
2017-08-16周荻董金鲁
周荻, 董金鲁
(哈尔滨工业大学 航天学院, 黑龙江 哈尔滨 150001)
带襟翼的飞行器非线性控制系统分析和设计
周荻, 董金鲁
(哈尔滨工业大学 航天学院, 黑龙江 哈尔滨 150001)
以襟翼作为执行机构的面对称飞行器,研究其控制能力和自动驾驶仪设计。襟翼作为执行机构相比传统全动舵缺少方向舵,对缺少方向舵类型的控制方式,推导出此情况下的面对称飞行器动力学模型。基于该模型描述的非线性控制系统,采用微分几何方法进行能控性分析,证明该系统的弱能控性;应用求解状态依赖的Riccati方程方法,以襟翼为执行机构的面对称飞行器,设计非线性最优控制器。仿真结果表明,在系统弱能控性的基础上,设计的控制器能够在缺少方向舵的情况下,使得滚转角和纵向过载快速地跟踪指令。同时验证了飞行器双通道控制的可行性。
控制科学与技术; 飞行器; 襟翼; 倾斜转弯; 能控性; 非线性控制
0 引言
常规的全动舵面对称飞行器在再入飞行过程中,舵缝隙和舵轴附近的热环境非常恶劣,舵轴在承受巨大弯扭力矩的同时,还必须解决所面临严重的烧蚀防热问题,舵的设计往往成为影响飞行器战术性能的严重制约因素[1]。襟翼的成功应用解决了舵烧蚀过热的问题,国外已有许多成功案例,如双锥削面升力体构形的高超音速飞行器HTV-1、类乘波构形的HTV-2[2]以及最近欧空局试飞成功的过渡性实验飞行器(IXV)。文献[3]为了实现运载器再入过程的控制,把再入控制问题分为襟翼控制问题、反作用控制系统(RCS)控制问题、襟翼和RCS协调控制问题。文献[4]将变结构控制应用到运载器的姿态控制系统中,采用襟翼和RCS共同执行。
文献[1-3]只是从工程角度出发,给出了襟翼的控制规律,并未从理论层次上对运用襟翼的控制系统进行可控性分析。当面对称飞行器利用襟翼作为执行机构时,只能给出等效的升降舵和副翼舵控制量。因此,需要对该三通道耦合非线性控制系统进行能控性分析。
Brocket[5]利用微分几何理论对非线性系统的能控性问题进行了研究,得到了一些有关对称非线性系统的充要条件。此后,Krener[6]针对非线性能控性问题,引出李代数秩条件。Sun[7-8]利用拓扑和整体微分几何法探索了非线性控制系统的全局能控性问题,但只是对低维系统进行了初步研究。本文应用微分几何理论对以襟翼为执行机构的面对称飞行器倾斜转弯(BTT)非线性耦合控制系统进行能控性分析。
在能控性分析的基础上,得出一定条件下能控的结论后,就需要设计以襟翼为执行机构的面对称飞行器BTT非线性耦合控制系统。一些非线性控制方法,如Lyapunov函数法[9]、变结构控制法[10]、非线性动态逆法[11]等,存在一定的局限性。例如,Lyapunov函数法的设计规律性较差,要求设计者有一定的经验;变结构控制法可能对挠性器件引起更大的抖颤现象;非线性动态逆法要求系统本身是可逆的[12]。而非线性控制法中的状态依赖Riccati方程(SDRE)法,最初被用来解决仿射性非线性系统的调节问题,可以实时求解每一步,给出具体的数值解,其求解简单,控制精度高,被广泛地应用于先进制导律设计[13]、制导控制一体化[14]、直升机的姿态控制[15]等诸多领域。文献[13-15]利用SDRE设计的非线性控制器均是在控制系统的三通道控制量存在时设计的。然而,当以襟翼作为执行机构时,无方向舵控制量,应用SDRE方法进行三通道耦合控制系统设计,将面临更大的挑战。
本文在利用微分几何方法对襟翼的非线性控制系统进行可控性分析的基础上,应用SDRE非线方法求解该控制系统的非线性耦合最优控制器,并进行仿真验证。
1 襟翼控制的面对称飞行器动力学模型
飞行器采用襟翼作为控制系统的执行机构时,它只能给出等效的升降舵控制量δz和副翼控制量δx,而此时系统中缺乏方向舵控制量δy. 由于偏航通道和滚转通道存在一定的气动耦合,因此在偏航通道引入副翼控制量δx,即利用副翼控制量δx共同控制偏航通道和滚转通道。为避免侧滑角发散,在滚转通道中引入侧滑角反馈量。
惯性积Jxy数值较小,对其忽略不计,则三通道动力学模型为
(1)
(2)

(3)

(4)
(5)

(6)
(7)
(8)
(9)
(10)
(11)
(12)
采用襟翼作为执行机构的飞行器,其纵向过载是由攻角和升降舵提供,侧向过载仅由侧滑角提供,则

(13)

(14)
导弹自动驾驶仪动态特性用1阶惯性环节描述:
(15)

(16)
式中:δxc、δzc分别为δx、δz的命令值;τ表示时间常数。
飞行器控制系统设计时经常采用过载指令跟踪方式,因此,把状态方程写作含过载的微分方程形式。根据(7)式~(16)式,动力学模型重写为
(17)
(18)
(19)
(20)
(21)

(22)
式中:k=v/g.


(23)
式中:
f(x)=

(24)

(25)
2 襟翼控制的面对称飞行器非线性控制系统能控性分析
分析一类非线性系统Σ:
(26)
式中:x∈M,M为n维实连通解析流形;y∈Rn;u∈Ω,Ω是Rl的一个子集;A,Bi∈V(M),V(M)为M上全体解析向量场的集合,是C∞(M)的模;C为C∞类函数集合。
设h1(x)∈C∞(M)、h2(x)∈C∞(M),则定义李代数[16]为

(27)
非线性系统Σ定义了一组向量场A,B1,B2,…,Bl,它们决定了一个对合分布,表示为
ΔΣ=[A,B1,B2,…,Bl],
(28)

(29)
(30)

令F3=[f(x),g1(x)],F4=[f(x),g2(x)].
同理,可得
(32)

(33)
(34)

(35)
因为状态变量是8维,故可先检验前8列,若满秩,则无需计算以后数列。由g1(x)、g2(x)、F3、F4、F5、F6、F7和F8张成的函数空间:

(36)

3 倾斜转弯飞行器三通道控制器设计


(37)
将非线性函数f(x)转化成SDC形式有无数种选择[17],本文采取文献[18]提到的较为简单的求取形式:

(38)
系统(23)式中,g(x)已经是SDC形式,故令B(x)=g(x).
根据(24)式和(38)式可知:
A(x)=
(39)

根据(25)式可知:
(40)

将(37)式扩展为

(41)
式中:

(42)
(43)

(44)
式中:Q(x)是半正定矩阵;R(x)为正定矩阵。则SDRE控制律设计为

(45)

(46)
4 设计实例与仿真
选取某飞行器在高度H=31.547 9 km、速度v=5 890.3 m/s的一个特征点,三通道气动参数分别见表1、表2和表3.

表1 俯仰通道气动参数

表2 偏航通道气动参数

表3 滚转通道气动参数
为实现BTT飞行器滚转角45°方向6g过载指令,控制系统相应的输入指令为γc=45°,Nyc=6g,Nzc=0g,其中g=9.81 m/s2. 受执行机构的饱和限制,最大舵偏角为30°,最大舵偏角速率为300°/s. 导弹自动驾驶仪时间常数τ=0.005.
权函数Q(x)选取为正定的对角矩阵,其中对应的元素越大,加权效果越明显,但也非越大越好。Q(x)的第1个元素是对纵向过载偏差积分的加权,权值过大会使过载最终偏离跟踪指令;第2个元素是对Ny的加权,为了尽快使过载趋于稳态,该权值选择时间的函数;第3个和第6个元素是分别对Nz和ωy的加权,由于偏航通道δx的作用稍弱,故权值要偏大;第4个元素是对γ的加权,权值越大,滚转角跟踪越快,而过大会产生较大的超调量;ωx数值较大其相应权值较小。R(x)的第1个元素过小将使δx舵偏角速率饱和,过大使得ωx角速率下降,相应滚转角跟踪指令变慢;第2个元素过小将使δz舵偏角速率过度饱和,过大使得纵向过载最终向上偏离跟踪指令,基于以上原则,Q(x)和R(x)分别选择为:
当t≤3时,
Q(x)=diag{0.1,17.5+6(t-3),260,
350,5,230,350,43,0.32};
(47)
当t>3时,
Q(x)=diag{0.1,23,260,350,5,230,350,43,0.32};
(48)
R(x)=diag{385,550}.
(49)
系统跟踪指令曲线如图1和图2所示。从图1可以看出滚转角γ在2 s后基本跟踪上其指令。由于所处高度较高,气动力矩较弱,滚转角响应指令变化的速度并不能很快。

图1 滚转角响应曲线Fig.1 Response curves of roll angle
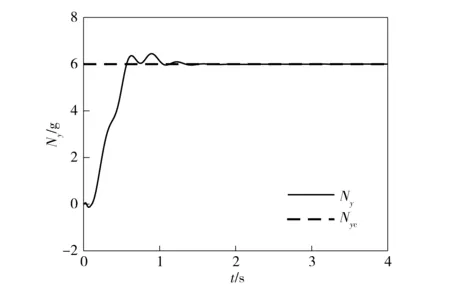
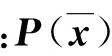
图2 纵向过载响应曲线Fig.2 Response curves of longitudinal overload
图2表示纵向过载Ny的响应曲线,最大超调量为7.4%,0.55 s后跟踪上其过载指令,从图2看出Ny存在非最小相位特性。
图3表示侧向过载Nz的响应曲线,最大超调量为0.23g,最后稳定在0g附近,表明侧向最终没有加速度。
图3 侧向过载响应曲线Fig.3 Response curves of lateral overload
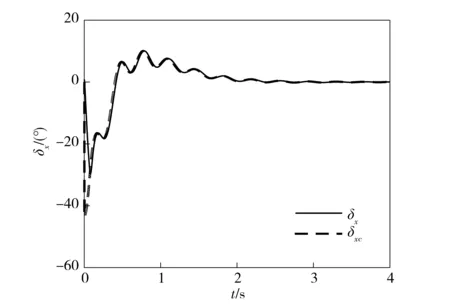
图4 副翼舵偏角响应曲线Fig.4 Response curves of aileron rudder angle
图4和图5分别显示了δx和δz变化情况。图4中δx曲线在0.08 s出现短暂的饱和现象,但很快就开始收敛,最后稳定在0°;图5中δz未出现饱和现象,最后稳定在1.3°左右。
图6~图8分别表示飞行器的姿态角速率ωx、ωy和ωz变化情况,均未出现饱和现象,ωx小于50.5°/s,ωy和ωz均小于18°/s.

图5 升降舵偏角响应曲线Fig.5 Response curves of elevator rudder angle

图6 x轴姿态角速率Fig.6 Attitude angular rate of x-axis
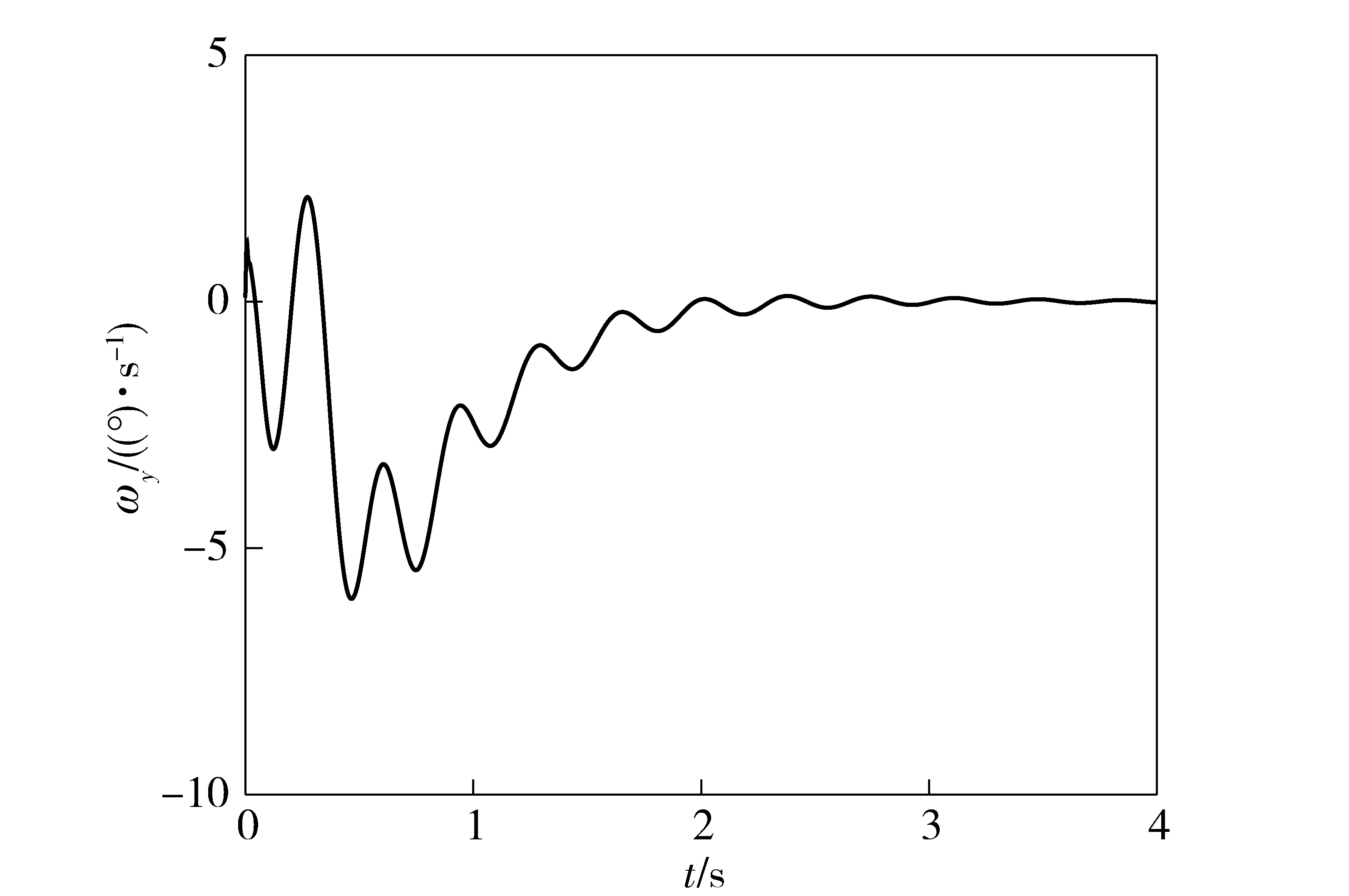
图7 y轴姿态角速率Fig.7 Attitude angular rate of y-axis

图8 z轴姿态角速率Fig.8 Attitude angular rate of z-axis
5 结论
针对以襟翼为执行机构的面对称飞行器,其等效控制量仅有δx和δz,建立了面对称飞行器的非线性耦合动力学模型。针对该模型代表的非线性耦合系统,应用微分几何方法对其进行了能控性分析,证明了在滚转和偏航通道之间气动耦合控制作用下,该系统具有弱能控性。
在非线性系统弱能控的基础上,应用状态依赖Riccati方程方法,针对以襟翼为执行机构的三通道耦合控制系统设计了非线性最优控制器,应用该控制器进行数值仿真,得出如下结果:
1) 滚转角在δx控制下比较快速地跟踪滚转角指令。
2) 在δx作用下侧向过载渐进收敛到0g.
3) 纵向过载在δz的控制下以较好的动态特性快速跟踪过载指令。
References)
[1] 唐伟, 张勇, 马强, 等. 带控制舵椭圆截面飞行器的气动设计[J]. 空气动力学学报, 2006, 24(2): 223-226. TANG Wei, ZHANG Yong, MA Qiang, et al. Aerodynamics configuration design for elliptical cross section vehicle with flaps[J]. Acta Aerodynamica Sinica, 2006, 24(2): 223-226. (in Chinese)
[2] 邓帆, 任怀宇, 李绪国, 等. 采用不同气动控制舵面的临近空间高超声速滑翔飞行器舵效研究[J]. 空气动力学学报, 2014, 32(2): 240-245. DENG Fan, REN Huai-yu, LI Xu-guo, et al. Rudder effect of near space hypersonic gliding vehicle with different control surfaces[J]. Acta Aerodynamica Sinica, 2014, 32(2): 240-245. (in Chinese)
[3] 周宇. 重复使用运载器再入段控制技术研究[D]. 南京:南京航空航天大学, 2012. ZHOU Yu. Research on control technology of reentry for reusable launch aircraft[D]. Nanjing:Nanjing University of Aeronautics and Astronautics, 2012. (in Chinese)
[4] 呼卫军, 周军. 可重复使用运载器变结构姿态控制算法设计[J]. 西北工业大学学报, 2007, 25(1): 92-96. HU Wei-jun, ZHOU Jun. Design of variable structure attitude control system for RLV[J]. Journal of Northwestern Polytechnical University, 2007,25(1): 92-96. (in Chinese)
[5] Brockett R W. System theory on group manifolds and coset spaces[J]. SIAM Journal on Control, 1972, 10(2): 265-284.
[6] Krener A. A generalization of Chow’s theorem and the Bang-Bang theorem to nonlinear control problems[J]. SIAM Journal on Control, 1974, 12(1): 43-52.
[7] Sun Y M. Further results on global controllability of planar nonlinear systems[J]. IEEE Transactions on Automatic Control, 2010, 55(8): 1872-1875.
[8] Sun Y M. Linear controllability versus global controllability[J]. IEEE Transactions on Automatic Control, 2009, 54(8): 1693-1697.
[9] Gennaro S D. Output attitude tracking for flexible spacecraft[J]. Automatica, 2002, 38: 1719-1726.
[10] 黄郁馨, 王彤宇, 林琳. 基于滑模变结构控制的移动系统滑转率控制[J]. 兵工学报, 2014, 35(10): 1707-1715. HUANG Yu-xin, WANG Tong-yu, LIN Lin. Slip ratio control of locomotion system based on sliding mode variable structure control[J]. Acta Armamentarii, 2014, 35(10): 1707-1715. (in Chinese)
[11] 崔乃刚, 白瑜亮, 常亚武, 等. 基于非线性动态逆的水下运载器控制方法研究[J]. 兵工学报, 2013, 34(4): 443-450. CUI Nai-gang, BAI Yu-liang, CHANG Ya-wu, et al. Underwater vehicle control method based on nonlinear dynamic inversion[J]. Acta Armamentarii, 2013, 34(4): 443-450. (in Chinese)
[12] 张军, 徐世杰. 基于SDRE方法的挠性航天器姿态控制[J]. 宇航学报, 2008, 29(1): 138-144. ZHANG Jun, XU Shi-jie. Control of flexible spacecraft via state dependent Riccati equation technique[J]. Journal of Astronautics, 2008, 29(1): 138-144. (in Chinese)
[13] Cloutier J R, Stansbery D T. All-aspect acceleration limited homing guidance[C]∥AIAA Guidance, Navigation and Control Conference. Portland, OR, US:AIAA, 1999: 633-639.
[14] Vaddi S S, Menon P K, Ohlmeyer E J. Numerical SDRE approach for missile integrated guidance control[C]∥AIAA Guidance, Navigation and Control Conference. SC, US: AIAA, 2007: 1-17.
[15] Bogdanov A, Wan E. State-dependent Riccati equation control for small autonomous helicopters[J]. AIAA Journal of Guidance, Control and Dynamics, 2007, 30(1): 47-60.
[16] Hermann R, Krener A J. Nonlinear controllability and observability[J]. IEEE Transactions on Automatic Control, 1977, 22(5): 728-7473.
[17] Banks H T, Lewis B M, Tran H T. Nonlinear feedback controller and compensators: state-dependent Riccati equation approach[J]. Journal of Computational Optimization and Applications, 2007, 37(2): 177-218.
[18] Kiumars A R, Hamid K, Ah K S. SDRE control of non-affine systems[C]∥2016 4th International Conference on Control, Instrumentation, and Automation. Qazvin, Iran: IEEE, 2016: 239-244.
Analysis and Design of Nonlinear Control System for Aircraft with Flap
ZHOU Di, DONG Jin-lu
(School of Astronautics, Harbin Institute of Technology, Harbin 150001, Heilongjiang, China)
The design and controllability of autopilot of surface symmetric aircraft with flaps as actuators are studied. Compared with traditional aircrafts, such an aircraft lacks rudder in its yaw loop while using flaps as actuators. The motion dynamics model of such an aircraft is derived. The differential geometry method is used to analyze the controllability of the nonlinear control system described by this dynamics. This analysis has proved the controllability of the system. Based on the controllability analysis, a nonlinear optimal controller for the nonlinear coupled control system is designed using state-dependent Riccati equation method. Simulated results demonstrate that the roll angle and longitudinal overload can fast track the commands based on the system of weak controllability, and also testify the feasibility of two-channel control of aircraft.
control science and technology; aircraft; flap; bank-to-turn; controllability; nonlinear control
2016-09-09
国家自然科学基金项目(61174203)
董金鲁(1988—),男,博士研究生。E-mail: ins_dong@163.com
周荻(1969—),男,教授,博士生导师。E-mail: zhoud@hit.edu.cn
V448.133
A
1000-1093(2017)07-1322-08
10.3969/j.issn.1000-1093.2017.07.010
