平面弹性五杆机构的振动与构件弹性振动的平衡优化
2017-08-01江长云孙志宏RAHMANHabibur蔡闻然高明扬
江长云, 孙志宏, RAHMAN Habibur, 蔡闻然, 高明扬, 王 欢, 刘 智
(东华大学 机械工程学院, 上海 201620)
平面弹性五杆机构的振动与构件弹性振动的平衡优化
江长云, 孙志宏, RAHMAN Habibur, 蔡闻然, 高明扬, 王 欢, 刘 智
(东华大学 机械工程学院, 上海 201620)
采用SPACAR软件建立平面弹性五杆机构的有限元模型, 在Matlab环境下对其进行动力学仿真分析. 仿真结果表明, 通过不断增大曲柄转速, 机构的振动和构件的弹性振动均不断加剧. 将机构的振动、构件的弹性振动以及二者的综合作为3种不同的优化目标, 利用部分冗余伺服电机(PRSM)法对SPACAR建立的有限元模型进行平衡优化, 探讨3种优化目标的优化效果. 结果表明: 以构件的振动为目标函数虽然可以改善杆件的弹性振动, 但是会使机构的整体振动加剧;以机构振动力矩为目标函数或者以构件的振动和机构的振动二者的综合为目标函数均可同时平衡机构的振动和构件的弹性振动, 但前者对机构振动的平衡效果更好.
五杆机构;弹性;平衡;动力学;部分冗余伺服电机法
机构在运动过程中, 其总质心位置随机构运动而变化, 所产生的惯性力通过固定铰链点传递给机架引起机构的整体振动(shaking), 一般用振动力、振动力矩表示. 现代机械的发展趋势是高速化和轻型化, 高速化会大幅增加机构的惯性力, 而轻型化使构件在高速运动过程中更容易产生弹性振动(vibration). 对于弹性机构, 机构的惯性力使机构产生振动力和振动力矩, 而振动力和振动力矩又导致构件的振动、变形, 构件变形必定会改变惯性力, 从而增加振动力和振动力矩, 因此, 惯性力传递到机架而形成的机构整体振动与构件的弹性振动是两个耦合的动力学指标[7]. 机构整体振动与构件弹性振动均会恶化机构的工作性能, 影响执行端轨迹的精度, 所以对弹性机构进行平衡时, 有必要同时考虑这两个动力学指标.
对平面弹性机构动力学研究的文献已有很多, 但研究内容主要集中在机构振动的平衡[1]或构件弹性振动的抑制[2]这两个方面. 文献[3-4]通过控制附加的冗余驱动器在振动力、振动力矩的最大值附近施加的冗余驱动力矩,使机构的振动得到了较好的平衡. 文献[5-7]利用部分冗余伺服电机法(PRSM法)对弹性机构的振动进行动平衡优化并取得了良好的平衡效果. 与冗余驱动法相比, PRSM法不需要添加额外的元件, 具有一定的优越性[5]. 其中, 文献[6]利用PRSM法调节平面弹性五杆机构两曲柄的转速来减小机构的振动, 但是并没有研究对构件弹性振动的优化效果.
本文在文献[6]研究工作的基础上, 以平面弹性五杆机构为研究对象, 忽略负载和间隙的影响, 利用弹性动力学仿真软件建立该机构的有限元模型, 利用PRSM法对该机构的振动和构件的弹性振动进行动力学平衡优化, 探讨不同优化指标对弹性五杆机构动平衡优化效果的影响.
1 有限元理论分析
1.1 机构振动分析
弹性五杆机构有限元模型[8]如图1所示, 由曲柄(1)、连杆(2)、连杆(3)、曲柄(4)和机架组成. 两曲柄各划分为一个梁单元, 两连杆各划分为两个梁单元, 故整个系统由6个梁单元组成.Ui(i=1~22)表示广义坐标, (1)~(4)表示杆件编号, 1~7表示节点编号, ①~⑥表示梁单元编号.
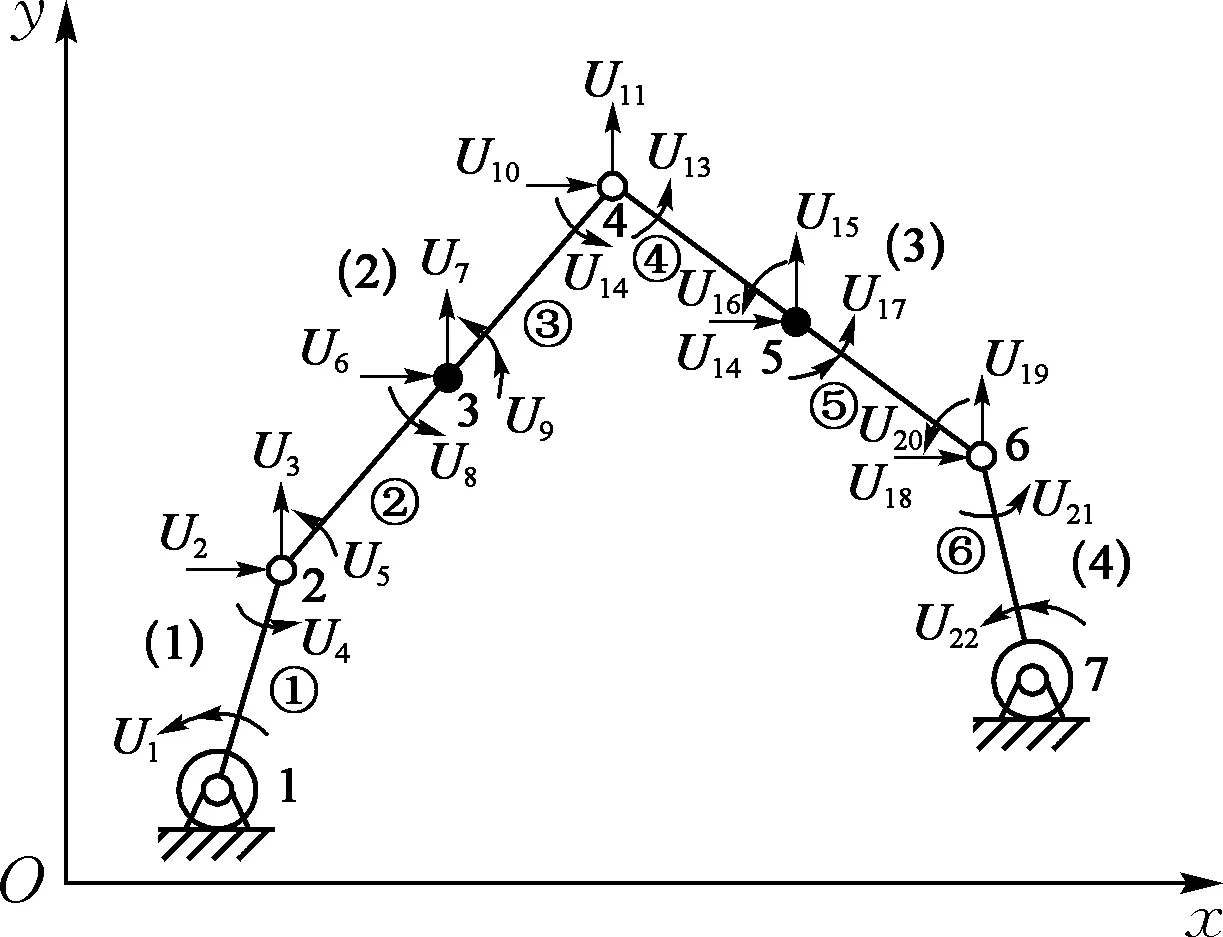
图1 弹性五杆机构有限元模型Fig.1 The finite model of elastic five-bar mechanism
梁单元的运动微分方程为

(1)

现将各单元的运动微分方程组装起来, 整个系统的运动微分方程为

(2)

机构的振动力和振动力矩实际上是机构对机架所施加的力和力矩. 机架的受力示意图如图2所示. 机构所受的4个力, 分别与副反力F1x、F1y、F7x、F7y大小相等, 方向相反.
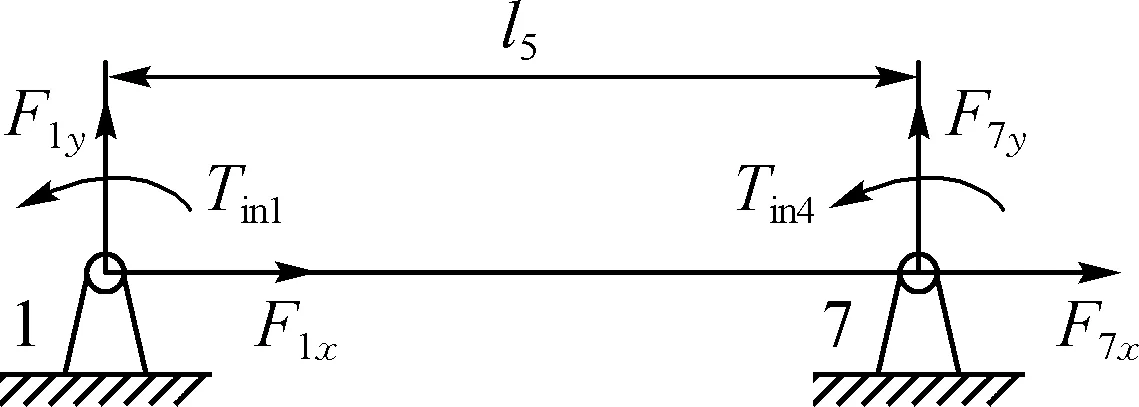
图2 机架受力分析Fig.2 The force analysis of rack
Tin1、Tin4为电机的输入力矩, 可求得机构的振动力Fsh和振动力矩Msh[4]为
(3)
(4)
式中:l5为节点1到7的距离.
1.2 构件弹性振动分析
由于将构件划分为梁单元, 因此,构件的弹性振动分析可以简化成梁单元的振动分析. 需特别申明, 本文中梁单元的振动是指横向振动(忽略梁的纵向振动), 梁单元的振动幅度用梁的轴线横向位移来描写. 平面弹性梁单元[9]如图3所示, 节点p、q的位置向量分别为(xp,yp)、(xq,yq), 角度φp、φq分别代表了Rpnx、Rqnx与x轴的夹角.Rpnx与Rpny为过节点p的相互垂直的向量, 而Rqnx和Rqny过节点q的相互垂直的向量. 当梁单元未变形时,Rpnx和Rqnx沿着梁轴线,Rpny和Rqny垂直于梁的轴线. 其中, 平面旋转矩阵Rp和Rq具体为
(5)
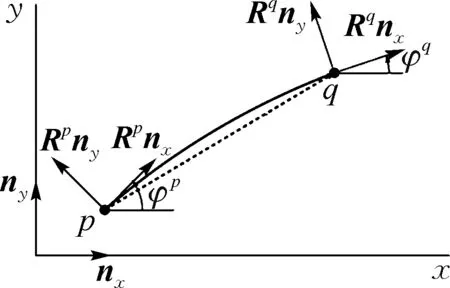
图3 平面弹性梁单元Fig.3 Planar flexible beam element
梁单元k的节点坐标可以表示为
(6)
平面梁单元的弯曲变形示意图如图4所示.

图4 平面弹性梁单元的弯曲变形Fig.4 Bending deformations of the planar beam element
(7)
式中:ny=[0, 1]T,l(k)=[(xq-xp), (yq-yp)]T.
在如图1所示的弹性五杆机构有限元模型中, 两连杆分别划分为两个梁单元, 连杆2由梁单元②和梁单元③组成, 连杆3由梁单元④和梁单元⑤组成, 所以, 连杆2和连杆3中点弯曲变形V2和V3[11]可以分别表示为
(8)
2 弹性五杆机构动力学仿真研究
以文献[6]中平面弹性五杆机构作为实例, 曲柄(1)杆长为80 mm, 截面宽为3.3 mm, 高为1.1 mm; 连杆(2)杆长为250 mm, 截面宽为2.9 mm, 高为1.8 mm;连杆(3)几何参数与连杆(2)一致;曲柄(4)杆长为100 mm, 截面宽为4.2 mm, 高为1.4 mm;机架长为250 mm. 转动副B的集中质量为0.012 4 kg, 转动惯量为1.116×10-7kg·m2;转动副C的集中质量为0.014 6 kg, 转动惯量为1.314×10-7kg·m2;转动副D的集中质量为0.013 3 kg, 转动惯量为1.197×10-7kg·m2. 构件材料: 钢, 密度ρ=7 800 kg/m3, 弹性模量E=2×1011Pa, 剪切模量G=8×1010Pa.
由于弹性五杆机构的动力学模型是非线性、强耦合的时变微分方程, 求解过程比较麻烦. 因此, 本文利用SPACAR软件直接建立平面弹性五杆机构有限元模型. SPACAR软件是一款基于非线性有限元理论的多自由度机构的动力学仿真软件[10-11],它需要在Matlab软件环境下运行使用, 这也为SPACAR软件与Matlab优化工具箱的结合提供了可能.
令两曲柄的转速ω1和ω4相等, 且初始角度均为0°, 改变两曲柄转速, 使之从0增至250 r/min, 得到弹性五杆机构的振动力和振动力矩的最大幅值的变化曲线如图5所示, 连杆(2)和连杆(3)中点弯曲变形的最大幅值的变化曲线如图6所示.

图5 振动力和振动力矩变化曲线Fig.5 The change of shaking force and shaking moment

图6 连杆中点弯曲变形变化曲线Fig.6 The change of bending deformation
从图5可以看出, 随着转速的增大, 机构的振动力和振动力矩也在不断增大, 说明曲柄转速增大, 机构整体振动加剧. 从图6可以看出, 曲柄转速增大, 构件中点的弯曲变形增加, 且随着转速的增长,弯曲变形增长的速率也增大. 因此, 机构运动过程中, 弹性连杆存在振动, 且随着曲柄转速的增加, 机构整体振动和连杆弹性振动的程度均加剧.

优化目标函数为
(9)
(10)
(11)
式中:W1、W2、W3、W4、W5、W6为加权系数, 其值分别取为W1=W2=0.5,W3=W4=W5=W6=0.25.
以上述3种目标函数为优化目标, 通过Matlab优化工具箱里的遗传算法(GA)进行优化, 得到如表1所示的优化效果.

表1 3种目标函数的优化效果
注:-代表下降, +代表上升.
图7~10分别表示以目标函数OF1为优化目标时, 振动力、振动力矩、连杆(2)中点弯曲变形和连杆(3)中点弯曲变形各动力学指标优化前后曲线.
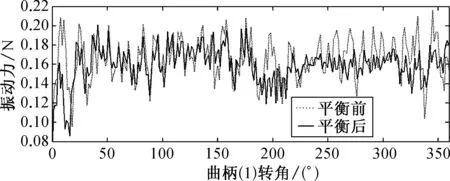
图7 振动力平衡情况Fig.7 Shaking force balancing

图8 振动力矩平衡情况Fig.8 Shaking moment balancing

图9 连杆(2)中点弯曲变形平衡情况Fig.9 Balancing of bending deformation of the midpoint of the connecting rod (2)

图10 连杆(3)中点弯曲变形平衡情况Fig.10 Balancing of bending deformation of the midpoint of the connecting rod (3)
通过对图7~10以及表1分析, 可以发现如下规律:
(1) 目标函数OF1和OF3均可同时平衡机构的振动和构件的弹性振动.
(2) 目标函数OF1对机构振动的平衡效果优于目标函数OF3, 而目标函数OF3对构件弹性振动的平衡效果优于目标函数OF1.
(3) 目标函数OF2虽然可以改善杆件的弹性振动, 但是会使机构的整体振动加剧, 其中, 振动力最大幅值增大了11.29%. 所以, 不能盲目地按照目标函数OF2来优化构件的弹性振动, 需与机构的振动同时优化.
因此, 若机构振动是主要平衡目标, 则可以单独以机构振动为优化目标;若构件弹性振动是主要平衡目标, 则需将机构振动和构件弹性振动二者综合为优化目标.
3 结 语
本文首先采用SPACAR软件直接建立平面弹性五杆机构的有限元模型, 对其进行动力学仿真分析. 结果发现, 随着曲柄转速的不断增加, 机构的整体振动和构件的弹性振动均不断加剧. 为了使机构达到平衡, 利用五次多项式二阶导数连续曲线拟合出其中一根曲柄的转速, 将机构的整体振动、构件的弹性振动以及二者的综合作为3种不同的优化目标, 将SPACAR与Matlab优化工具箱结合, 利用PRSM法对平面弹性五杆机构进行平衡优化. 优化结果表明: 弹性机构动平衡优化时, 若机构振动是主要平衡目标, 则单独以机构振动为优化目标, 可以在有效平衡机构振动的同时改善构件的弹性振动;若构件弹性振动是主要平衡目标, 则需将机构振动和构件弹性振动二者的综合作为为优化目标.
[1] 黄永强, 王子良. 连杆机构的弹性动力平衡[J].机械工程学报, 1991, 27(1): 91-97.
[2] 宋轶民, 张策, 余跃庆,等. 弹性连杆机构振动控制研究综述[J].机械工程学报, 2001, 37(10): 10-13.
[3] YU Y Q, LIN J. Active balancing of a flexible linkage with redundant drives[J]. Journal of Mechanical Design, 2003, 125(1): 119-123.
[4] 蒋斌. 用冗余驱动方法进行弹性机构动力平衡的理论与实验研究[D].北京: 北京工业大学机械工程与应用电子技术学院, 2003.
[5] 欧玉俊, 孙志宏, 章文俊,等. 基于冗余伺服电机法的弹性连杆机构的平衡[J].机械科学与技术, 2012, 31(9): 1454-1457.
[6] 杨元福. 基于PRSM法的平面弹性五杆机构动力学平衡研究[D].上海: 东华大学机械工程学院, 2014.
[7] SUN Z H, ZHANG B, ZHANG W J. Application of partial redundant servomotor approach to shaking balancing of flexible mechanisms: A finite element analysis[C]// The 14th IFToMM World Congress. Taipei, Taiwan, 2015.
[8] 张策. 弹性连杆机构的分析与设计[M].2版. 北京: 机械工业出版社, 1993.
[9] AARTS R G K M, JONKER J B, VAN DIJK J. Prototype modeling of mechanical systems: An introduction for module 7&8/ Project F [M]. Enschede: University of Twente, 2015.
[10] JONKER J B, MEIJAARD J P. SPACAR-computer program for dynamic analysis of flexible spatial mechanisms and manipulators[M]// W Schiehlen (ed.). Multi-body Systems Handbook. Berlin : Springer-Verlag, 1990: 123-143.
[11] AARTS R G K M, MEIJAARD J P, JONKER J B. SPACAR Manual[M]. Enschede: University of Twente, 2011.
(责任编辑: 杜 佳)
Vibration Balancing Optimization of Elastic Five-Bar Planar Linkages
JIANGChangyun,SUNZhihong,RAHMANHabibur,CAIWenran,GAOMingyang,WANGHuan,LIUZhi
(College of Mechanical Engineering, Donghua University, Shanghai 201620, China)
An elastic five-bar finite model is directly established with the SPACAR program and the dynamic simulation analysis is discussed in the Matlab environment. Increasing gradually the speed of the cranks, the simulation results show that the shaking of the whole mechanism and the vibration of the elastic bars are continually aggrandized. Regarding the shaking of the mechanism, the vibration of two connecting rods and the integrated function of both as three different optimization goals, the dynamic property of the elastic five-bar linkages is optimized based on partial redundant servo motor (PRSM) approach, and then the optimization results of three different goals are analyzed. Taking comprehensive analyses into account, the conclusion is firmly achieved. On one hand, considering the vibration of linkages as the objective function, it is possible to decrease the elastic vibration of bars, yet the shaking is intensified in the meantime. On the other hand, with shaking moment or the integrated function of both as the objective function, both the vibration and the shaking can be diminished at the same time, while the effect of the former on balancing of the shaking is better.
five-bar linkages; elastic; balancing; dynamics; partial redundant servo motor(PRSM)approach
1671-0444 (2017)03-0425-05
2016-05-04
江长云(1992—),女,河南信阳人,硕士研究生,研究方向为机械设计及理论. E-mail:chyjiang23@126.com 孙志宏(联系人),女,教授, E-mail:zhsun@dhu.edu.cn
TH 113.25
A