基于滑模观测器的PMSM无位置传感器矢量控制*
2017-07-31姜建国
姜建国,韩 康
(东北石油大学 电气信息工程学院,黑龙江 大庆 163318)
基于滑模观测器的PMSM无位置传感器矢量控制*
姜建国,韩 康
(东北石油大学 电气信息工程学院,黑龙江 大庆 163318)
设计了一款基于滑模观测器的无位置传感器来估算永磁同步电机的转子位置和速度。针对传统滑模观测器控制系统的不足,用sigmoid函数作为开关函数,有效抑制了系统抖振;采用基于高精度的相位跟踪原理的锁相环技术估算转子位置,省去了滤波环节,避免了滤波器引起的延时效应。经Matlab仿真,表明所设计的滑模观测器能够使控制系统可靠运行,并且准确地估算了转子位置和速度。
无位置传感器;滑模观测器;锁相环
0 引言
近些年来,永磁同步电机由于具有高转矩惯性比、高效率及高功率密度等优点,在工业驱动领域应用前景广阔[1]。在永磁同步电机矢量控制中,获取精确的转子位置和速度信息是至关重要的。在传统的控制系统中,转子位置和速度信息可利用光学编码器或解析器检测。然而在一些电机系统中,位置传感器与电机的成本几乎相当,使整个系统在成本上与其他类型电机的驱动系统相比缺乏竞争力,而且还受到许多外界条件,比如温度、湿度和震动等条件的限制,使系统应用范围受限[2-3]。因此,永磁同步电机无位置传感器控制系统成为研究的热点。在传统的滑模观测器中,由于符号函数的不连续性,往往引起较大的系统抖振;低通滤波器的存在引起估算反电动势的相位延迟,需要对估算的转子位置进行相应的补偿。本文提出的基于滑模观测器的永磁同步电机无位置传感器控制系统,利用电机的电压和电流信息来获取转子的位置和速度信号。采用具有连续性质的sigmoid函数代替符号函数作为新的开关函数,削弱了系统抖振;应用基于高精度的相位跟踪原理的锁相环技术得到电机转子位置,省去了滤波环节。 最后,通过动态仿真分析和负载扰动仿真分析验证了该控制策略的可行性和有效性,得到了较为精确的转速和转子位置信息。
1 永磁同步电机数学模型
推导永磁同步电机动态数学模型时基于以下假设[4]:
(1)定子绕组星型连接,且加以对称正弦分布的磁动势。
(2)反电动势呈正弦分布。
(3)转子无阻尼绕组,永磁体无阻尼作用。
(4)铁磁部分磁路线性,不计饱和、剩磁、涡流、磁滞损耗等影响。
对于表贴式永磁同步电机,在静止α-β坐标系中的数学模型为:
(1)
其中,
(2)
其中:iα、iβ、uα、uβ、eα、eβ分别为定子电流、定子电压和反电动势在α、β轴上的分量;Rs为定子电阻;Ls为定子电感;ψf为转子磁链;we为转子角速度;θe为转子位置角度。
2 永磁同步电机滑模观测器的构建
2.1 传统滑模观测器的构建
根据公式(1)和滑模变结构控制理论[5],构造传统滑模观测器如下式:
(3)
由式(3)减去式(1)得到定子电流动态误差方程为:
(4)
(5)
将式(5)代入式(4)可得:
(6)

其中,wc为低通滤波器的截止频率。通过反电动势的数学表达式(2)可得转子位置角度和转速的估算值,即:

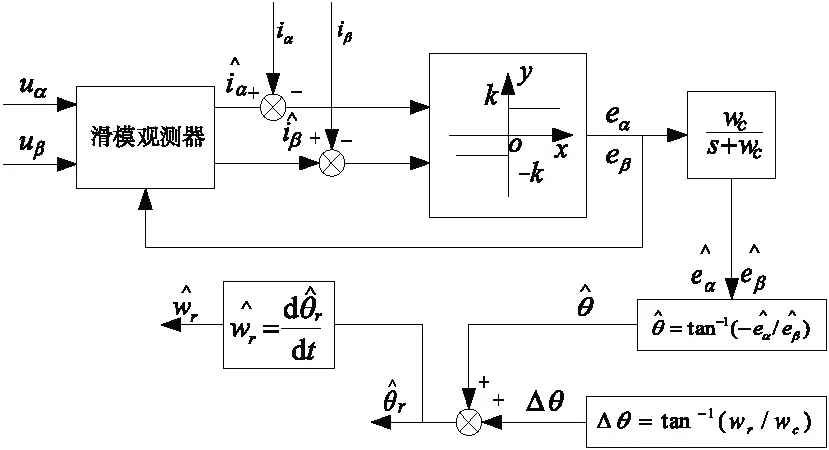
图1 传统滑模观测器控制框图
2.2 新型开关函数的选取和稳定性分析
传统滑模变结构控制系统的鲁棒性虽然强于一般的连续系统,但是由于其所采用的开关函数的不连续性,往往导致系统发生抖振现象[8]。为了有效抑制抖振本文选用具有连续性质的sigmoid函数作为开关函数。
定义新型滑模观测器的开关函数为:
其中,a为正实数,x代表定子电流的估算误差。
随着a取值的不同,sigmoid函数的波形也发生变化。当a分别取5,10,100时函数波形如图2所示。
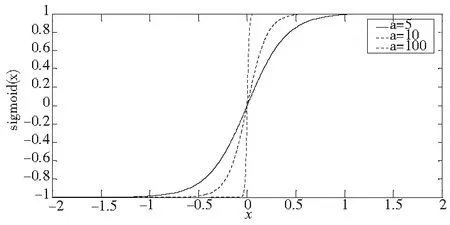
图2 不同a值下sigmoid函数的波形图
sigmoid函数在整个定义域上是连续函数,因此可适当地削弱抖振。当a值变大时,切换速度会变快,但是系统抖振会变大;当a值变小时,切换速度会变慢,但是系统抖振会变小[9]。因此适当地选取a的值可以有效改善系统的动态性能。
选取李雅普诺夫方程:
对其求导得,


2.3 锁相环位置检测系统
在传统滑模观测器中,低通滤波器的存在引起了估算反电动势的相位延迟,需要对估算的转子位置进行相应的补偿。本文中采用了基于高精度的相位跟踪原理的锁相环(简称PLL)技术估算转子位置和速度信息,省去了滤波环节。根据反电动势与转子位置角度的关系,通过PI调节器得到转子速度,然后通过对转子速度积分得到转子位置信息[10]。锁相环模块框图如图3所示。
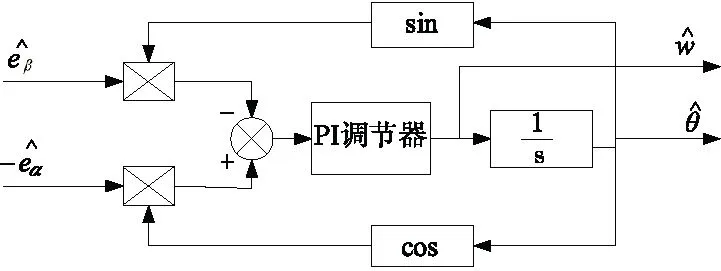
图3 锁相环位置检测系统框图
3 控制系统建模仿真
应用Matlab软件搭建基于滑模观测器的永磁同步电机无位置传感器矢量控制模型,采用了id=0的双闭环矢量控制策略以实现转矩与磁链的解耦。取滑模观测器增益为ksw=200,sigmoid函数中参数a=10。所采用的电机参数为:定子电阻Rs=2.875Ω,电感Ls=8.5mH,永磁体提供的转子磁链ψf=0.175Wb,磁极对数P=2。整体控制系统如图4所示。
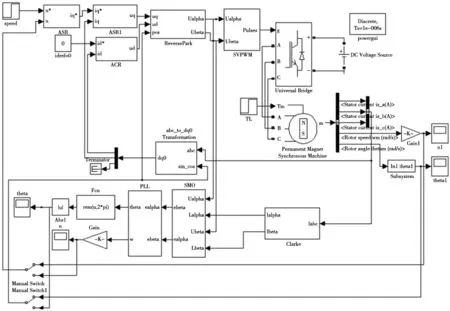
图4 永磁同步电机无位置传感器矢量控制系统图
4 仿真结果与分析
本文仿真实验,包括系统动态仿真分析和负载扰动仿真分析两部分。
(1)系统动态仿真分析
设置仿真时间0.3s,电机空载运行,初始给定转速500r/min,在0.15s时刻,给定转速突变为1000r/min。得到转速突变时转速和位置仿真图如图5、图6所示。
从图中可以看出:在转速发生突变时,通过滑模观测器估算的转速和位置经过短时间的调节后可以迅速的跟踪上转子的实际转速和位置。在转速上升时,转速偏差较大,经过短时间调整稳定后转速偏差很小,基本接近于零。由于sigmoid函数的引入,转速抖振得到了有效的抑制;位置偏差仅在转速上升和2π到0切换时较大,其他时间内很小。锁相环技术的应用,使得滑模观测器估算的转子位置很好地跟随了转子实际位置。因此用滑模观测器估算电机转子速度和位置信息时,系统具有良好的动态性能。
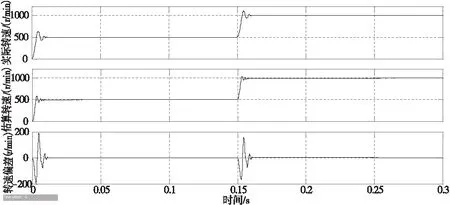
图5 转速突变时实际转速和估算转速波形
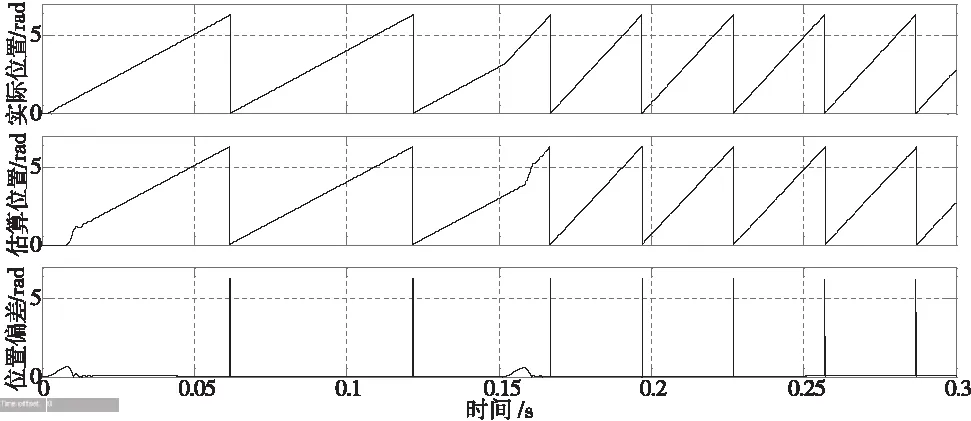
图6 转速突变时实际位置和估算位置波形
(2)负载扰动仿真分析
设置仿真时间0.3s,给定转速1000r/min,电机空载启动,在0.15s时刻,负载转矩突变为2N·m。得到电磁转矩、实际转速、估算转速和转子位置仿真图如图7~图10所示。
从图中可以看出:在负载转矩发生突变时,实际转速和估算转速经过短时间的调节后均可恢复到稳定状态;应用锁相环估算到的转子位置仍然可以很好地跟随转子的实际位置,精度较高。因此,本文构建的滑模观测器估算转子转速和位置信息,在负载转矩发生变化时,具有响应快、鲁棒性强的特点。
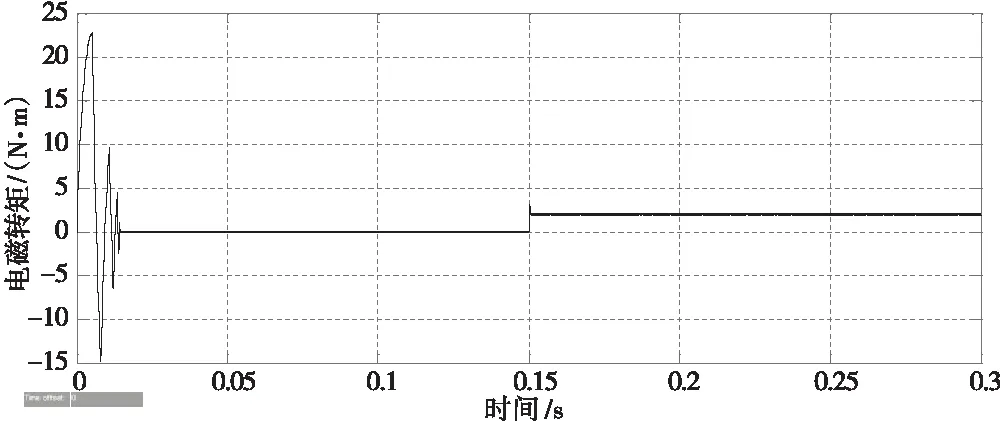
图7 负载扰动时电磁转矩波形
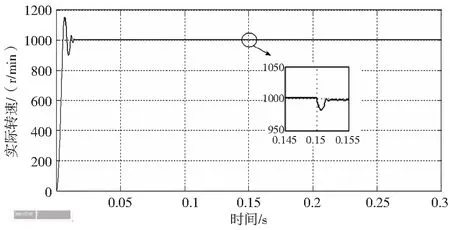
图8 负载扰动时实际转速波形
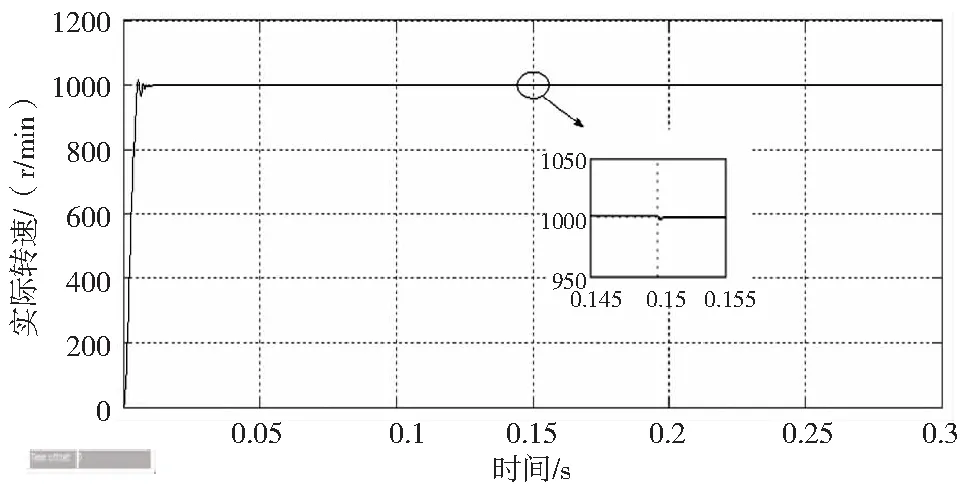
图9 负载扰动时估算转速波形
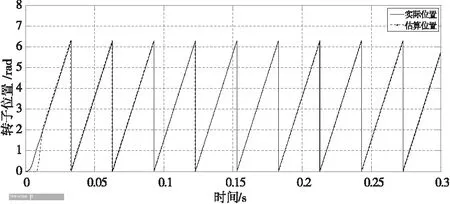
图10 负载扰动时转子位置波形
5 结束语
在永磁同步电机α-β轴数学模型的基础上,构建了滑模观测器来估算电机转子位置和速度,并且采用了sigmoid函数和锁相环技术,有效抑制了系统抖振,省去了滤波环节。通过仿真,将滑模观测器估算的转速、位置与实际转速、位置比较,得出设计的控制系统具有良好的动态性能,并且对于负载扰动具有较好的鲁棒性。
[1] 王庆龙,张兴,张崇巍. 永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识 [J].中国电机工程学报,2014,34(6):897-902.
[2] 谭建成. 永磁无刷直流电机技术 [M].北京:机械工业出版社,2012.
[3] 张猛,肖曦,李永东. 基于扩展卡尔曼滤波器的永磁同步电机转速和磁链观测器[J].中国电机工程学报,2007,27(36):36-40.
[4] 李永东. 交流电机数字控制系统[M].北京:机械工业出版社,2012.
[5] 高为炳. 变结构控制理论基础[M].北京:中国科学技术出版社,1990.
[6] 王悍枭,刘凌,吴华伟. 改进型滑模观测器的永磁同步电机无传感器控制策略[J].西安交通大学学报,2016,50(6):104-109.
[7] 罗清伟,曹广忠,汪济欢. 基于改进的滑模观测器无传感器永磁同步电机矢量控制[J].微特电机,2014,42(3):55-60.
[8] 褚丹丹. 基于滑模观测器的永磁同步电机无传感器矢量控制研究[D]. 哈尔滨:哈尔滨工业大学,2015.
[9] 莫远秋. 基于滑模观测器的高速永磁同步电机无传感器技术研究[D]. 哈尔滨:哈尔滨工业大学,2015.
[10] 刘军. 基于滑模观测器的PMSM无位置传感器矢量控制的研究[D].杭州:浙江大学,2014.
(编辑 李秀敏)
Position Sensorless Vector Control of PMSM Based on Sliding Mode Observer
JIANG Jian-guo,HAN Kang
(School of Electrical Engineering and Information, Northeast Petroleum University, Daqing Heilongjiang 163318, China)
A position sensorless controller based on the sliding mode observer was designed to estimate the rotor position and the speed of permanent magnet synchronous motor. In view of the deficiency of the traditional sliding mode observer control system, the sigmoid function was used as the switching function, which can effectively restrain the chattering of the system; the phase-locked loop technique based on high-precision phase tracking was used to estimate rotor position, and the delay caused by filter was avoided for omitting the filter loop. The Matlab simulation results show that the sliding mode observer can make the control system run reliably, and accurately estimate the rotor position and speed.
position sensorless; sliding mode observer; phase-locked loop
1001-2265(2017)07-0126-04
10.13462/j.cnki.mmtamt.2017.07.030
2017-01-06;
2017-02-03
黑龙江省自然科学基金(E2016013)
姜建国(1966—),男,乌鲁木齐人,东北石油大学教授,博士,研究方向为电力电子与电力传动,(E-mail)jjgnepu@163.com;通讯作者:韩康(1991—),男,河北邯郸人,东北石油大学硕士研究生,研究方向为电力电子与电力传动,(E-mail)1046307734@qq.com。
TH166;TG659
A