3-PRR柔性微动平台的运动建模与工作空间分析*
2017-07-31马少博
马少博,贺 磊
(山东理工大学 机械工程学院,山东 淄博 255049)
3-PRR柔性微动平台的运动建模与工作空间分析*
马少博,贺 磊
(山东理工大学 机械工程学院,山东 淄博 255049)
基于3-PRR型柔性并联微动平台较3-RRR型更适合直线驱动,提出了一种含不同类型柔铰的3-PRR柔性微动平台最简型式,整体结构形式由3组呈120°对称均布的柔性运动支链构成。针对伪刚体模型法的不足,运用卡氏第二定理,根据不同柔铰的刚度模型和力传递关系建立柔性支链的刚度模型,基于刚度叠加原理得到以柔铰刚度为自变量的系统刚度模型,建立了微动平台封闭型整体运动模型。通过分析结构参数对雅克比矩阵的影响,选取了最佳结构参数。通过建立约束条件,将原平台的工作空间与最佳结构参数时的工作空间进行对比,验证了最佳结构参数选取的正确性。通过有限元法与理论模型计算结果之间的分析比较,模型的运动误差在可控范围之内,说明了该模型的正确性。
柔性并联机构;柔性铰链;运动模型
0 引言
近些年,随着EMS、生物工程、微加工等领域的快速发展,平面柔性微动平台应用越来越广泛[1]。目前,国内外学者对结构简单的单自由度和二自由度的柔性微动平台的研究较为深入[2-4],平面三自由度的微动平台的研究相对较少,且主要围绕3-RRR型平台开展研究[5-7],柔性微动平台一般采用直线驱动器驱动,这与被驱动件的运动形式——转动(R副)不相匹配,因此会产生运动误差,而3-PRR型平台则避免了该类误差的产生。贾晓辉采用伪刚体模型法对3-PRR柔性微动平台进行了运动分析[8],莫嘉嗣等通过闭环矢量法[9]建立了3-PRR柔性微动平台的运动模型。伪刚体模型法虽然可以提供简单的理论模型,但忽略了微位移条件下柔性铰链的轴漂累积误差,精度很难保证。另外,闭环矢量法与坐标变换相结合构建的3-PRR并联机构的运动学模型,其计算过程较为繁琐[10]。
本文建立了以直角型柔性铰链和直圆型柔性铰链为基础的3-PRR柔性微动平台最简形式,根据不同柔铰的刚度模型和力传递关系,基于刚度叠加原理得到了以柔铰刚度为自变量的系统刚度模型,并对结构参数和工作空间进行了分析,最后针对微动平台运动模型进行了有限元验证。
1 3-PRR柔性并联机构运动模型
3-PRR柔性并联机构如图1所示,该机构由3个PRR运动支链呈120°均匀分布,每个运动支链由两个直圆型柔性铰链和靠近驱动端的直角型柔性铰链组成,以便实现直线驱动。
由于直角型柔性铰链的精度较差,柔性最好,因此将直角型的柔性铰链靠近驱动端,作为直线驱动的输入端;鉴于直圆型柔性铰链的柔性最差,精度最好,因此将直圆型的柔性铰链作为运动关节。直角型柔性铰链结构如图2所示,直圆型柔性铰链结构如图3所示,采用卡氏第二定理,可得直角型柔性铰链与直圆型柔性铰链封闭形式的柔度公式,具体推导和矩阵内元素见文献[11]。
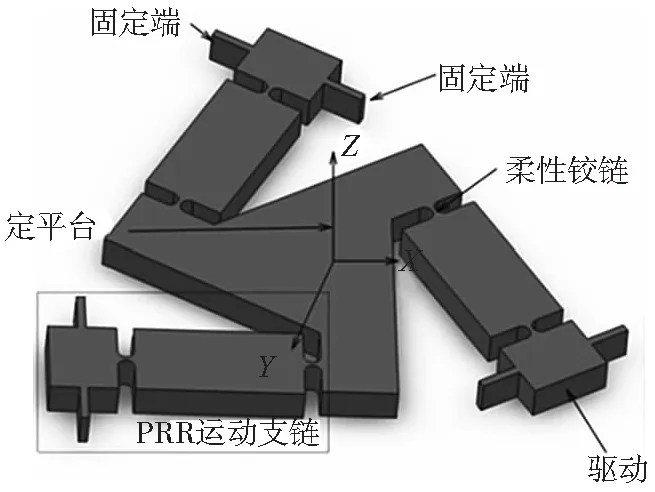
图1 3-PRR柔性并联机构
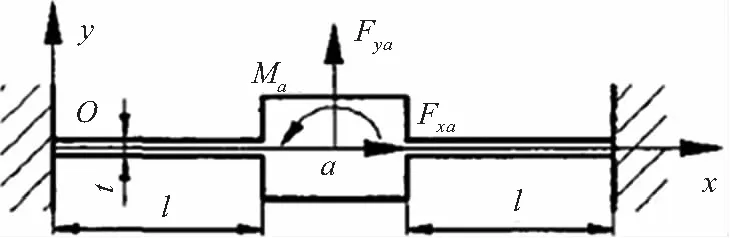
图2 直角型柔性铰链结构示意图
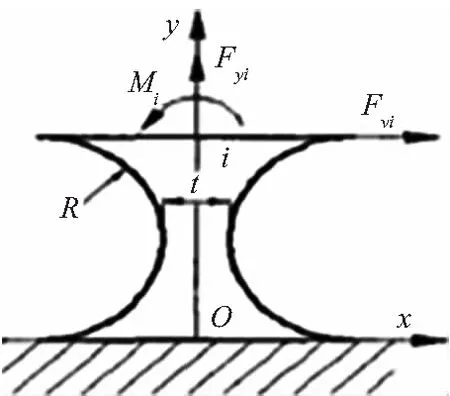
图3 直圆型柔性铰链结构示意图
直角型柔性铰链的柔度矩阵公式为:
(1)
直圆型柔性铰链的柔度矩阵公式为:
(2)
假设机构只在柔性铰链部分变形,其他部分均为刚体,且变形在其弹性极限范围内。设平台所有柔性铰链尺寸相同。定位平台的柔度可定义为:
(3)

微动平台的模型如图1所示,由于该3-PRR型柔性并联机构是对称的,3个并联联结的运动支链均匀分布,且每个支链包含有3个串联的不同类型的柔性铰链,根据这种结构的特点,为了求出该平台的整体的柔度矩阵,其大体思路是先求出每条支链上各个柔性铰链对该分支链的柔度分量;再求出各支链对平台的柔度矩阵;最后通过各支链柔度的叠加求得系统的柔度。
下面推导第1运动支链的柔度矩阵,设Ch1(直角型柔性铰链),Ch2,Ch3分别为每个柔性铰链对支链柔度的贡献量,它们可定义为:
(4)

(5)
式中:F1x,F1y,M1z分别为作用在点1的力和力矩,根据式(3),可得直角柔性铰链在点1的位移为:
(6)
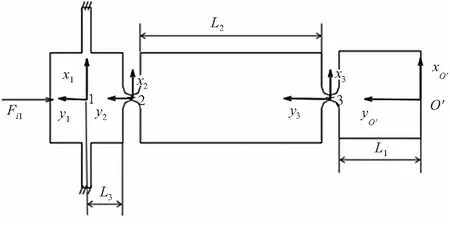
图4 柔性机构运动支链

(7)
则根据式(4)可得该柔性铰链对整个系统o′点处的柔性贡献量为:
(8)
同理,可得第1运动支链中直圆柔性铰链Ch2,Ch3的柔度矩阵:
(9)
由于该铰链对o′处y轴方向的位移放大的作用几乎可以忽略,对x轴方向的位移有放大作用,因此,根据力的传递间的关系,作用于点o′的力矩和力可以转化为作用在点2,柔性铰链2作用在点o′处的位移应该为:
(10)
则根据式(4)可得该柔性铰链对整个系统o′点处的柔性贡献量为:
Ch2=
(11)
同理,根据以上推导可得直圆柔性铰链3对整个系统o′点处的柔性贡献量为:
Ch3=
(12)
综上可得:第一支链的柔度表达式为:
C1o′=Ch1+Ch2+Ch3
(13)
根据式(3)可得作用在点o′的力与位移之间的关系为:
Uo′=C1o′Fo′
(14)

在点o和o′点的力之间的关系可以表示为:
Fo′=T1Fo
(15)
其中,
同理,由于第一支链作用于o点,使得o点x轴方向有放大作用,则在点o和o′点的位移之间的关系可以表示为:
Uo=T2Uo′
(16)
其中:
联合式(14)~式(16)可得点o力与位移之间的关系:
Uo=C1oFo
(17)
其中,C1O=T2C1O′T1
由于第2、3支链与第1支链之间距离2π/3,则支链2、3支链的柔度为:
(18)
其中,
根据式(13)和式(18)可得整个系统柔度为:
(19)
下面推导力Fin与输出位移之间的柔度矩阵CoFin和表示输入位移与输出力FO的柔度矩阵CinFo。则CoFin可以表示为:
(20)
同理,先求出柔度CL1o′Fin
(21)
则根据式(21)可得柔度CL1o′Fin为:
(22)
其在点o的柔度CL1oFin为:
CL1oF1in=T2CL1o′F1in
(23)
在力F1in作用下,支链1在o点的输出位移为:
UL1OF1in=CL1oF1in·F1in=C1O·FO
(24)
根据式(24)可以得出等价输出力为:
(25)
则输出柔度COFin为:
(26)
根据柔度的对称性,柔度CinFo可表示为:
(27)
同理,表示输入力与输入位移之间的柔度矩阵CinFin可表示为:
(28)
为了得到该平台的输入位移与输出位移之间的封闭形式的运动关系,下面推导其雅可比矩阵的表示,由于:Fin=[F1in;F2in;F3in]
(29)
(30)
联合式(29)、式(30)可得雅可比矩阵J:
(31)
2 结构参数影响分析
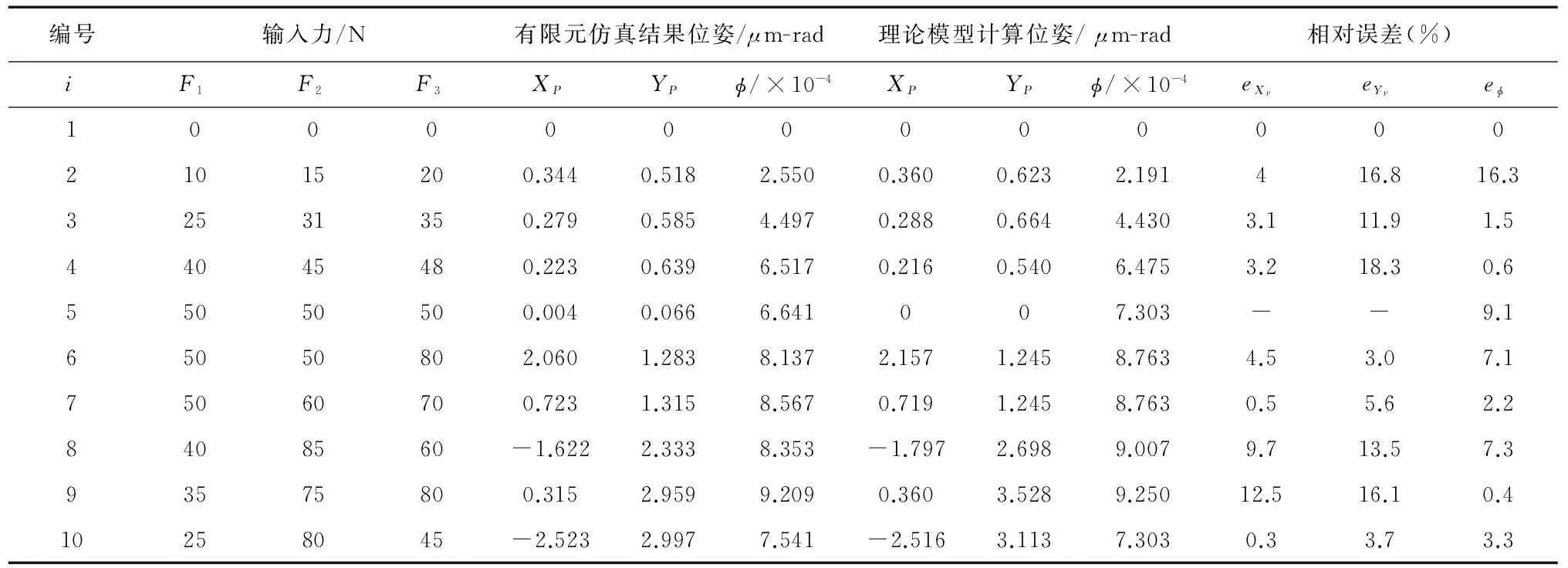
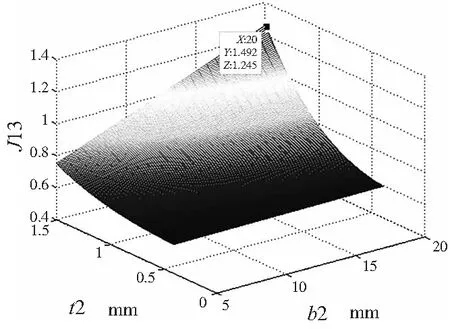
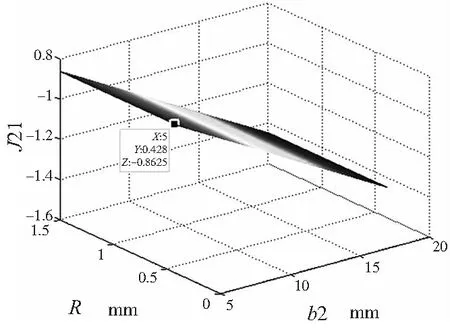
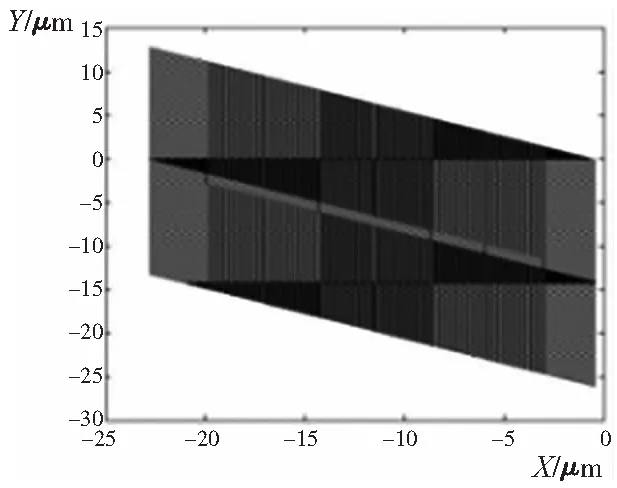
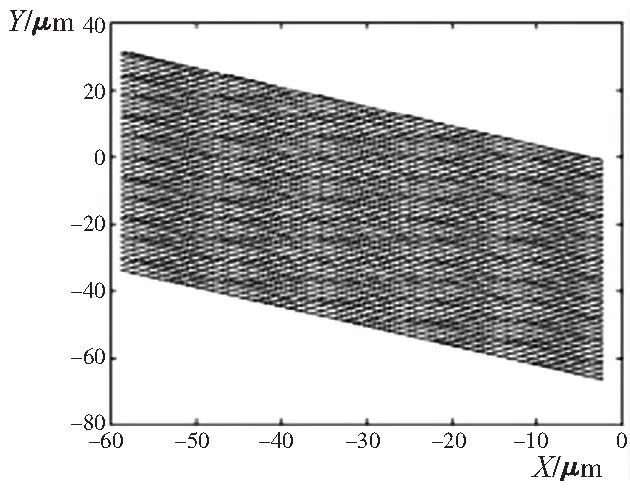
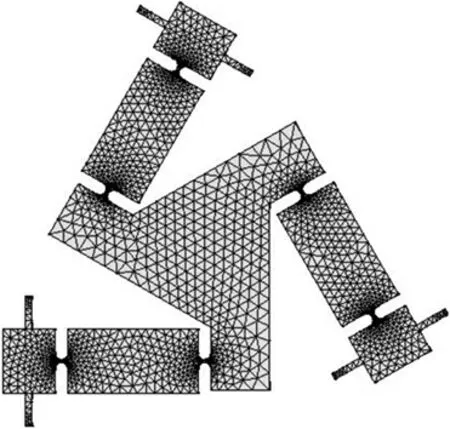
雅克比矩阵是反映平台输入与输出关系的一个重要的运动学指标。本文理论模型推导部分得到的雅克比矩阵是一个关于结构参数的封闭形式的表达式。为了了解柔性铰链结构参数对雅克比矩阵的影响,确定柔铰最佳的结构参数,下面通过MATLAB分析了结构参数对雅克比矩阵各个因素的影响。设结构参数范围分别为0 图6 b1和t1对J12的影响 图7 b2和t2对J13的影响 图8 b2和R对J21的影响 3.1 影响工作空间的因素 (1)铰链处强度的限制 直圆型柔性铰链处的强度约束条件为: 其中,Kt=(2.7t+5.4R)/(8R+t)+0.325,MZ可通过力的传递关系得出。 (2)驱动力的限制 一般情况下,为了达到理想的设计要求,平台达到最大输出位移时的最大驱动力F应该小于压电陶瓷的驱动力f。即约束条件应该为: F-f≤0 3.2 工作空间 根据理论模型位移输出公式和影响工作空间的约束条件编制MATLAB程序,得到微动平台X和Y方向的工作空间如图所示。图9为原结构参数时微动平台的工作空间,图10为确定的最佳结构参数时的工作空间。 图9 原结构参数时微动平台的工作空间 图10 最佳结构参数时的工作空间 由图9和图10可知,结构参数t1、t2、R对输出位移影响较大。当t1取值为0.4,t2取值为1.5,b1和b2取值为5,R取值为0.4时,微动平台的工作面积较原来结构参数有了较为明显的增大,说明第三部分得出的结论是正确的。 选用铝合金作为3-PRR柔性并联机构微定位平台的材料,通过柔性铰链与结构参数之间的关系确定该平台主要部件的尺寸如表1所示。 将3-PRR柔性并联机构微定位平台的三维模型导入到ANSYS中,设置材料属性,其弹性模量为71GPa,泊松比为0.33。定义单元类型为SOLID95,通过自由网格划分后得到的有限元模型如图11所示。 图11 3-PRR柔性并联微定位平台有限元模型 在驱动端施加载荷,测量输出端的位移。由理论模型计算得出的输出端位移与有限元分析得出的输出端位移对比结果见表2。结果表明:理论模型计算得出的输出端位移与有限元仿真结果最大误差为18.3%,最小为0.3%。误差产生的主要原因有:有限元模型将整个平台视为柔性体并在计算过程中考虑了剪切,而理论计算模型只是将柔性铰链部分视为弹性体,其他部分为刚性构件,这造成了数据的主要误差;在有限元模型的仿真过程中,网格的划分,节点的选取均对计算结果有一定的影响。 (1)本文提出一种适于直线驱动的3-PRR柔性并联机构微定位平台,基于柔性铰链卡氏第二定理,建立了该平台封闭形式运动模型。 (2)通过结构参数对雅克比矩阵的影响分析,了解了结构参数t1、t2、R对输出位移的影响较大,得出了最佳的结构参数; (3)通过建立约束条件,将原平台的工作空间与最佳结构参数时的工作空间进行对比,验证了最佳结构参数选取的正确性; (4)通过有限元法与理论模型计算结果的分析比较,两者的运动模型误差在允许范围之内,说明了该模型的正确性。 表1 机构的主要部件的尺寸 表2 ANSYS仿真分析结果和误差 [1] 于靖军,裴旭,毕树生,等.柔性铰链机构设计方法研究进展[J].机械工程学报,2010,46(13):2-13. [2] I A Ryu,J Bonev. A New Method for Solving the Direct Kinematics of General 6-6 Stewart Platform Using Three Linear Extra Sensors. Mechanism and Machine Theory, 2000, 35(1): 423-436. [3] J F Li. Inverse Kinematic and Dynamic Analysis of 3-DOF Parallel Mechanism. Chinese Journal of Mechanical Engineering, 2003, 16(1): 54-58. [4] 冯晓梅,孙开元,张大卫,等.基于ANSYS的高速精密定位平台有限元分析[J].组合机床与自动化加工技术,2009(9):76-80,83. [5] 吴鹰飞,李勇,周兆英,等.蠕动式微动工作台的设计实现[J].中国机械工程, 2001,12(3):263-265. [6] 张宪民,王华,胡存银.压电陶瓷驱动三自由度精密定位系统的弹性动力学与输入调理特性研究[J].机械工程学报,2007,20(1):9-14. [7] 胡俊峰,张宪民.3自由度精密定位平台的运动特性和优化设计[J].光学精密工程,2012,20(12):2686-2695. [8] 贾晓辉,刘今越. 3-PRR柔性并联机构的优化设计[J].机械设计,2014,31(1):26-27. [9] 莫嘉嗣,张宪民,邱志成,等. SEM环境下3PRR并联平台奇异区域规避与逃逸控制策略[J].机械工程学报,2015,51(23):1-5. [10] Her I. Methodology for compliant mechanism design[D]. Michigan:Purdue University,1986. [11] 胡光学.大行程结构一体化二维微定位台参数化设计及实验[D].淄博:山东理工大学,2012. (编辑 李秀敏) Motion Modeling and Workspace Analysis of a 3-PRR Flexible Micro Motion Platform MA Shao-bo, HE Lei (School of Mechanical Engineering, Shandong University of Technology, Zibo Shandong 255049,China) Based on the 3-PRR compliant parallel micro motion platform than the 3-RRR type is more suitable for linear drive, and a 3-PRR compliant micro displacement platform with different types of flexure hinges is proposed .The structure form of the micro motion platform is composed of 3 groups of flexible motion branched chains with 120 degree symmetrical uniform distribution. aiming at the deficiency of the method of pseudo rigid body model at present , using the castigliano's second theorem .Combining the compliance equations of flexure hinge with the force transmission relations of mechanisms ,the stiffness model of each sub-chain was obtained and the stiffness of the entire system which took the hinge flexibility as the independent variables was obtained .The closed form of the micro motion platform was established . Through the analysis of the influence of structure parameters on the Jacobian matrix, the optimum structural parameters were selected .By establishing the constraint conditions and comparing the working space between the original platform and the optimal structure parameters, which verifies the correctness of the selection of the optimal structural parameters. By comparing the kinematic model between theoretical analysis and FEA, the results show that the model motion error within the controllable range, which illustrates that the model is correct. compliant parallel mechanism; flexible hinge; motion mode 1001-2265(2017)07-0046-05 10.13462/j.cnki.mmtamt.2017.07.011 2016-09-09; 2016-10-25 山东省高等学校科研计划项目资助(J13LB07) 马少博(1993—),男,山东德州人,山东理工大学硕士研究生,研究方向为现代设计理论与方法,(E-mail)18353364172@163.com;通讯作者:贺磊(1980—),男,山东临朐人,山东理工大学副教授,博士研究生,研究方向为机构学与创新设计,(E-mail)helei@sdut.edu.cn。 TH166;TG659 A
3 工作空间
4 有限元分析
5 结论