内置式无轴承永磁同步电动机电磁特性分析
2017-07-24罗帅孙晓东1b周铸杨泽斌李可
罗帅,孙晓东,1b,周铸,杨泽斌,李可
(1.江苏大学 a.汽车与交通工程学院,b.汽车工程研究院,c.电气信息与工程学院,江苏 镇江 212013;2.江苏大全凯帆开关有限公司,江苏 镇江 212013)
无轴承电动机于1988年由瑞士学者Bosch首次明确提出[1],之后随着自动控制、数字信号处理等技术的应用得到了快速发展。如今,无轴承电动机技术已经运用到了各种结构的电动机,如无轴承感应电动机、无轴承开关磁阻电动机、无轴承薄片电动机以及无轴承永磁电动机等[2-4],其中无轴承永磁电动机具有非常广阔的发展前景[5]。
无轴承永磁电动机是一种结合永磁同步电动机与磁轴承功能于一体的新型电动机[6],具有体积小、效率高、结构简单、易于控制等优点[7-8]。无轴承电动机在一些特殊的场合,如高速甚至超高速运行的航空航天系统、无菌洁净的生物工程等领域得以广泛应用[9-10]。
研究无轴承永磁电动机的电磁特性对无轴承电动机的优化设计具有非常重要的意义。文献[11]采用有限元仿真的方法对表贴式无轴承永磁电动机的永磁磁链、电感转矩等进行分析。但表贴式永磁电动机为隐极式电机,内置式电动机为凸极式电机,两者在电磁特性上的差别比较大,且内置式永磁体在转子内部,更适合高速场合,因此有必要研究凸极式电动机的电磁特性。
为此,借助于有限元分析软件Ansoft Maxwell,对转矩极对数为2、悬浮极对数为3的内置式无轴承永磁同步电动机进行电磁特性分析,主要包括永磁磁链、感应电动势、电感、转矩以及悬浮力。
1 无轴承电动机悬浮原理及有限元模型的建立
内置式无轴承永磁同步电动机的悬浮力产生原理如图1所示。永磁和转矩绕组产生4极磁场Ψ4,悬浮绕组NSα通电产生一组6极磁场 Ψ6,沿x轴正向方向Ψ4和Ψ6的旋转方向相同,两者间起相互叠加的作用,因此沿x轴正向磁场增强;在x轴负方向上,Ψ4和Ψ6的旋转方向相反,两者相互抵消,因此沿x轴负方向上的磁场被减弱;此时会产生沿x轴正向的悬浮力Fx(图1a)。同理,当悬浮绕组NSβ通电时,沿y轴正向Ψ4和Ψ6的旋转方向相同,而沿y轴负方向Ψ4和Ψ6的旋转方向相反,因此产生沿y轴正方向上的悬浮力Fy(图1b)。

图1 悬浮力产生原理图Fig.1 Principle diagram of suspension force generation
内置式无轴承永磁电动机有限元模型如图2所示。电动机主要由定子、极对数为2的转矩绕组、极对数为3的悬浮绕组、转子、永磁体、隔磁铝条、轴组成。样机其他参数见表1。在Ansoft Maxwell中网格划分的疏密对有限元分析精度影响较大,其中气隙部分网格划分越密,计算精度越高,采用手动剖分的方式,对气隙部分的划分较密(图3)。

图2 有限元模型Fig.2 Finite element model

表1 内置式永磁同步电动机参数Tab.1 Parameters of interior permanent magnet synchronous motor

图3 网格划分Fig.3 Meshing
2 电磁特性分析
2.1 永磁磁链
对样机进行有限元分析得到的永磁磁链如图4所示,此时转矩绕组与悬浮绕组内不通入电流,从图中可以看出,转子旋转一周时,永磁磁链变换2个周期,且每相之间相隔60°机械角(转矩绕组极对数为2时,电角度为120°),这与理论相符。对A相永磁磁链在一个电角度周期内进行Fourier分解如图5所示,从图中可以看出,永磁磁链的正弦度比较高,其中3次谐波占谐波分量的主要部分。基波幅值和谐波分量的幅值如图6所示,从图中可以看出,谐波分量只占基波的7.4%,且3次谐波占总谐波的85.7%。该结果有助于对电动机进行优化,采用Y型连接方式可以有效降低3次谐波。在不考虑谐波的影响下,三相永磁磁链ΨPMA,ΨPMB,ΨPMC分别为
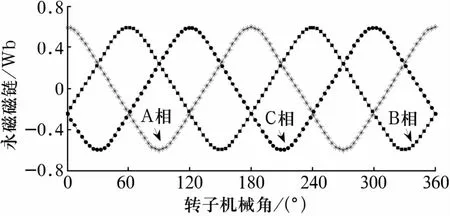
图4 永磁磁链Fig.4 Flux linkage of permanent magnet

图5 A相永磁磁链谐波分解Fig.5 FFT analysis of phase A permanent magnet

图6 A相永磁磁链谐波幅值Fig.6 Flux linkage harmonic amplitude of phase A permanent magnet

式中:ΨM为永磁磁链幅值;PM为转矩绕组极对数;φ为转子转过的机械角。
在已知永磁磁链的情况下,感应电动势为

式中:ΨPM为永磁磁链;θ为转子转过的电角度;n为电动机转速。电动机转速为3 000 r/min时的空载感应电动势如图7所示。从图中可以看出,电动机稳定运行时,感应电动势的仿真值与根据(2)式得到的计算值除相位之间有非常小的差距(约为3.5°)之外,幅值与波形的误差很小。对A相感应电动势进行谐波分析,结果如图8所示。从图中可以看出,3次谐波分量较高,这主要是因为永磁磁链的3次谐波较高。

图7 感应电动势Fig.7 EMF wave forms

图8 A相感应电动势谐波分解Fig.8 FFT analysis of phase A EMF
2.2 电感
以A相为例,根据有限元软件求出三相永磁磁链ΨPMA,ΨPMB和 ΨPMC,再通入电流iA,得到永磁体和A相电流共同作用产生的三相磁链ΨA,ΨB和ΨC,再根据电感的物理意义可以得到A相的自感Laa及其分别与B,C相的互感Mba,Mca
转矩绕组电感如图9所示,此时悬浮绕组电流为0。以A相为例,从图中可以看出,当θ=0时,A相自感值最低,这是因为永磁体磁场与转矩绕组磁场相互加强,磁路饱和严重,导致A相自感最小;当θ=π/2或 θ=3π/2时,A相磁场和永磁体磁场相互错开,互不影响,A相磁路不饱和,因此电感值最大;当θ=π时,A相磁场与永磁磁场方向相反,整个磁路饱和度有所降低,但由于永磁体产生的磁场较强,磁路饱和仍比较严重,因此电感值比最小值大。此外,A相对B相的互感与B相对A相的互感相等(任意其他两相也相同),这与理论上相符合。

图9 转矩绕组电感Fig.9 Torque winding inductance
把转矩绕组三相电感变换到两相旋转坐标系(即d-q坐标系)下,得到的交直轴电感如图10所示。从图中可以看出,直轴电感Ld比交轴电感Lq小很多,这与凸极式电动机的特点相吻合。

图10 转矩绕组交直轴电感Fig.10 d-q axis inductance of torque winding
2.3 转矩
电磁转矩Tem为


式中:Tcog为齿槽转矩,是由于定子齿的存在所引起的脉动转矩;Tpm为永磁转矩,是永磁体与交轴电流iq相互耦合产生的转矩;Tr为磁阻转矩;id,iq为交、直轴电流。
齿槽转矩的周期Np受到定子槽数和转子极对数的影响,且满足[12]

式中:NHCF为定子槽数与转子极对数的最大公约数。将相应参数带入(5)式可以求出NP=1。齿槽转矩周期以机械角度表达为

转子转过180°时的齿槽转矩波形图如图11所示(转矩绕组电流与悬浮绕组电流为0)。从图中可以看出,齿槽转矩的周期为10°,这与(6)式计算的结果相吻合;齿槽转矩在0上下有规律波动,且平均值基本为0,这说明齿槽转矩只会产生转矩波动。

图11 齿槽转矩Fig.11 Cogging torque
转矩绕组通入2 A电流时的电磁转矩与齿槽转矩波形图如图12所示。理论上电磁转矩减去齿槽转矩应为一条直线,但图中电磁转矩减去齿槽转矩有一定的波动,这与永磁磁链和电感曲线不是标准的正弦曲线有关。
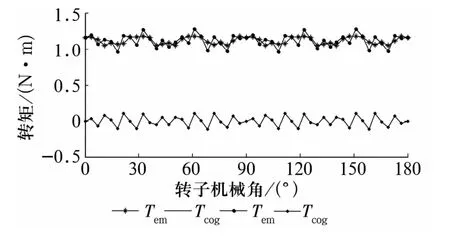
图12 电磁转矩Fig.12 Electromagnetic torque
2.4 悬浮力
根据Maxwell应力张量法,作用在转子上的悬浮力为

式中:当电动机结构参数给定时,km,kl为常数;Im,Is分别为转矩绕组电流与永磁体等效电流矢量相加值和悬浮绕组电流;θm,θs分别为转矩绕组与悬浮绕组电流相位角;μ0为真空磁导率;r为转子半径;Nm,Ns分别为转矩绕组与悬浮绕组每相串联匝数;m为电动机的相数;kd1,kd2分别为转矩绕组与悬浮绕组分布因数;δ0为气隙长度。
悬浮力与悬浮绕组电流及相位的关系如图13所示。从图中可以看出,沿x,y轴方向的悬浮力随悬浮绕组电流相位变化分别呈余弦与负的正弦规律变化,悬浮力基本与电流幅值呈正比关系,这与(7)式、(8)式相符;此外,电流为2 A时,仿真值和理论值非常接近,随着电流的增大两者误差逐渐增大,这是因为当悬浮力电流增大时磁路饱和严重,悬浮力减小。

图13 悬浮力与悬浮绕组电流及相位的关系Fig.13 Relationship between suspension force suspension winding current and suspension winding current phase
3 结束语
分析了内置式无轴承永磁电动机的悬浮原理,用有限元分析软件Ansoft Maxwell对其进行了电磁特性仿真分析及悬浮力模型验证。仿真结果表明,内置式无轴承永磁电动机的转矩绕组电感与转矩绕组磁场对永磁体磁场的增去磁作用有关,悬浮力与悬浮绕组电流的值和相位有关,且与数学模型的误差较小。该结果对内置式无轴承永磁同步电动机设计有一定的参考作用。
