基于自抗扰控制的无人机光电吊舱视轴稳定技术
2017-07-04孙立志海鹰航空通用装备有限责任公司
孙立志(海鹰航空通用装备有限责任公司)
光电吊舱相当于无人机的“眼睛”,为了保证“视线”的平稳,设计了双速度环控制结构,并采用自抗扰控制(ADRC)方法.经仿真验证,该技术能够使光电吊舱视轴稳定精度得到提高。
光电吊舱是一种可以有效隔离载机扰动,保持光电载荷视轴稳定的装置,其装备于各型无人机上,主要功能是获取载体外特定目标的稳定图像。
在光电吊舱系统中,视轴稳定技术十分重要。视轴稳定与否在于对平台所受各类扰动的抑制是否有效,提高平台对扰动的抑制能力,即可提高视轴的稳定精度。本文从两轴两框架光电吊舱入手,设计基于“主动抗扰”的控制算法,将自抗扰控制技术应用于光电吊舱控制系统,对系统的外部扰动进行总体观测和抑制,从而可靠地提高平台的视轴稳定能力。
在光电吊舱控制系统中,速率稳定回路是实现视轴稳定功能的重要回路,对该回路的设计十分重要。由于单速度环的设计难以满足功能要求,对速度调节器的性能要求也较高,因此,本文设计双速度环串级结构,将不同类别的扰动进行隔离,分别设计控制器进行消除,避免各种扰动因素的互相影响。

两款某型无人机的光电吊舱。
两轴两框架光电吊舱的结构
无人机的机械接口与光电吊舱的方位轴结合,轴上装有同轴连接的方位驱动电机和方位测角旋变;方位轴下方吊挂光电吊舱的方位框架,方位框架内装有俯仰框架;在俯仰框架上,为了平衡平台质量,俯仰测角旋变和俯仰驱动电机分装于俯仰轴的两端,其定子固定于方位框架两侧;在俯仰框架内部固定着可见光成像系统和红外夜视成像系统。
自抗扰稳定控制器
自抗扰控制器是以经典PID控制器的思想为基础,结合现代控制理论而提出的一种观测和补偿相结合的非线性控制器。以应用于无人机光电吊舱控制系统的二阶自抗扰稳定控制器为例,其模型可以分为跟踪微分器(TD)、扩张状态观测器(ESO)和状态误差反馈控制律(SEF)三部分。
扩张状态观测器是自抗扰控制器的核心部分,利用扩张状态观测器能够将系统的内部扰动和外部扰动进行实时观测,再经过跟踪微分器对系统相关信号进行合理提取,通过非线性反馈控制得到系统的控制量,实现良好的控制性能。在该控制过程中,自抗扰控制器并不依赖被控对象,即不依赖于光电吊舱系统的精确模型。此外,扩张状态观测器的引入可以将不同扰动成分不加区分地进行观测,能够更有效地解决无人机平台中各类扰动因素复杂多样的问题,规避了光电吊舱系统的不确定性等问题,能够达到无人机光电吊舱所要求的抗扰性能指标。
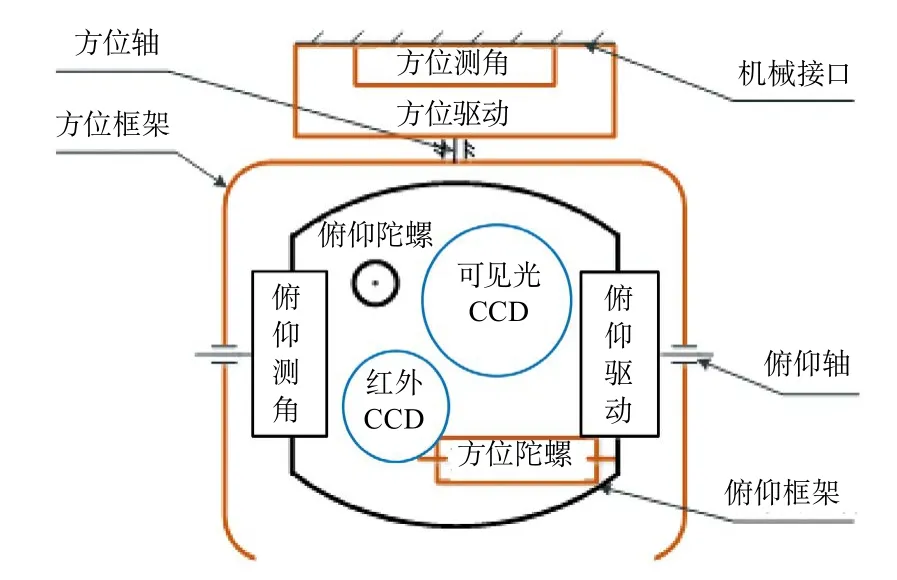
(左)两轴两框架光电吊舱结构简图。
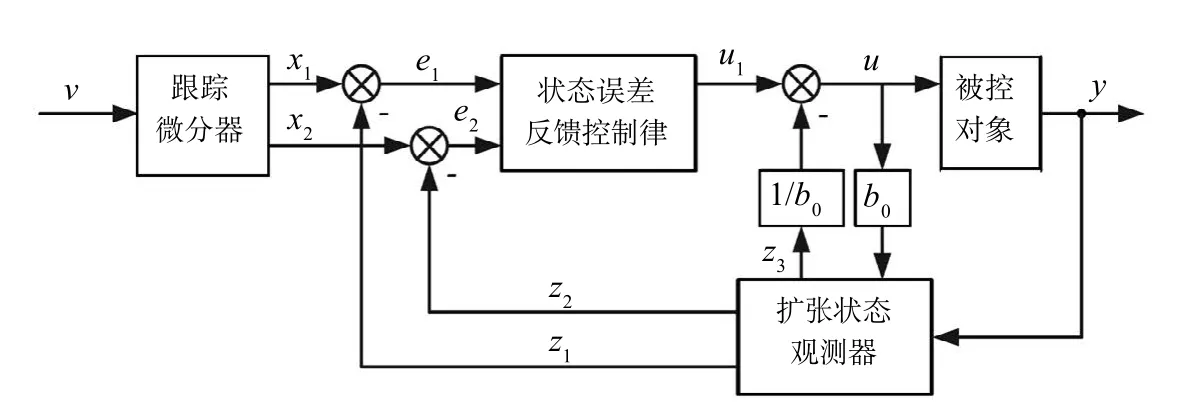
(右)二阶自抗扰控制器原理图。
光电吊舱双速度环控制结构
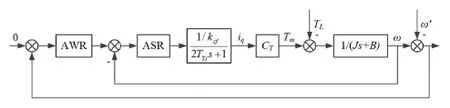
(上) 双速度环控制系统的结构框图。
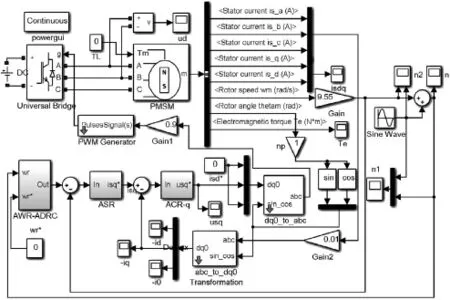
(下)双速度环控制系统Simulink仿真模型。
从控制结构上分析,单速度环控制结构存在无法协调抑制不同种类扰动和低速稳定性差的缺点。本文在合理分析速度环的基础上,设计基于陀螺反馈信号的稳定环,形成双速度环的串级结构,实现合理抑制速率扰动和力矩扰动的控制结构。从控制策略上,由于系统各部分模型的非线性,系统的精确模型难以建立,通常依靠模型精确参数的控制方法较难达到理想的控制效果,因此,本文引入自抗扰控制器,将控制系统闭环内的扰动不加区分,直接观测并合理提取,从而将系统模型不精确的影响降至最低。采用双速度环结构后,控制系统的结构框图有所变化。
光电吊舱中,速度环和稳定环在系统的扰动抑制过程中起着关键作用,本文将自抗扰控制器应用于稳定环,同时对比传统的PI控制器,验证该控制结构对视轴稳定精度提高的有效性。
光电吊舱控制系统仿真模型
本文利用MATLAB/Simulink仿真软件对光电吊舱控制系统中的自抗扰控制算法进行仿真,并分析控制策略的可行性,得出合理的控制参数。根据光电吊舱控制系统模型,搭建某一框吊舱伺服系统的Simulink仿真模型。在该模型中,电流环、速度环和稳定环构成三闭环控制系统,其中速度环和稳定环构成串级控制结构,稳定控制器采用上文设计的自抗扰稳定控制器。为了与单速度环控制系统进行对比分析,同时搭建由电流环和稳定环构成的单速度环闭环控制结构的Simulink仿真模型。
在双速度环控制系统的Simulink仿真模型中,稳定环控制器是基于自抗扰控制器设计的,其中的跟踪微分器、扩张状态观测器和状态误差反馈控制律采用S-函数编写,作为对比,PI稳定控制器的参数按“二阶最佳”原则进行整定。
光电吊舱控制系统仿真分析
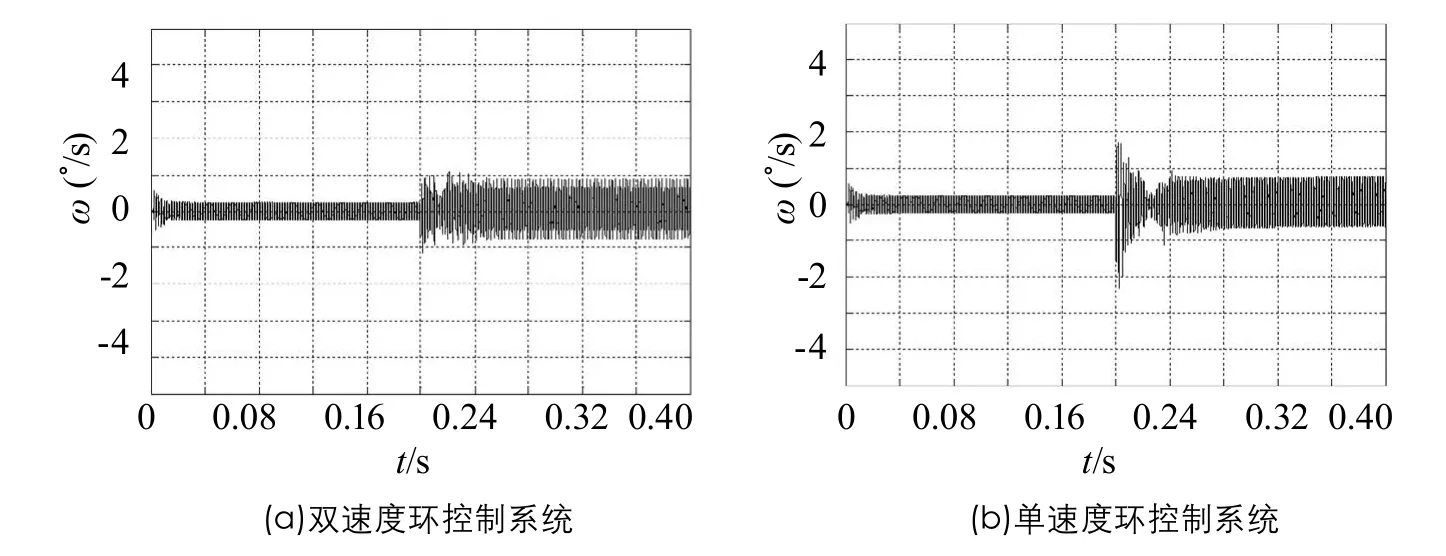
根据视轴稳定的机理,在实际运行中需设定光电吊舱各轴的角速度给定值为0。实际中扰动因素成分复杂,为分别验证控制系统对复杂扰动成分的抑制能力,首先设定系统的扰动为一定频率的正弦力矩扰动。根据工程实际中的扰动成分,设置该正弦力矩扰动频率为5Hz、幅值为10%伺服电机额定转矩。仿真中观察吊舱某轴的角速度波形,对两种控制系统的控制效果进行对比分析,通过对波形的定性分析,对系统的扰动隔离度进行评价。
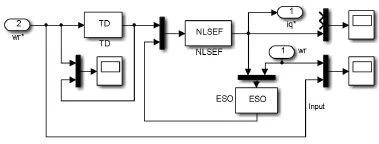
自抗扰稳定控制器Simulink仿真模型。
由仿真波形可知,在正弦力矩扰动的作用下,两种控制系统均可将力矩扰动隔离,实现速率稳定。双速度环控制系统的控制效果波形,与单速度环控制系统相比,前者的扰动隔离度更高,视轴稳定效果更好。
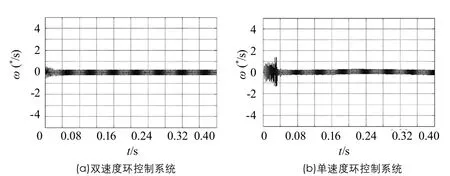
(上)针对力矩扰动的控制系统仿真波形。
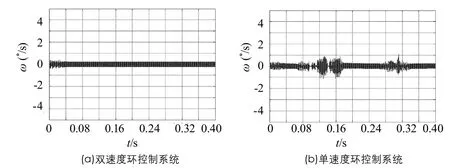
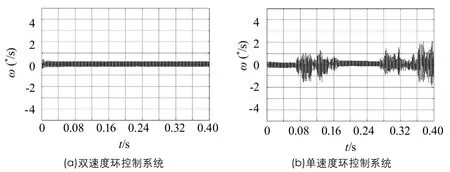
(中) 针对速率扰动的控制系统仿真波形。
(下)突加力矩扰动仿真波形。
再设定系统的扰动为一定频率的正弦速率扰动。参考工程实际,设置该正弦速率扰动频率为2.5Hz、幅值为20°/s。仿真中亦观察吊舱某轴的角速度波形,对两种控制系统的控制效果进行对比分析。
由仿真波形可知,在正弦速率扰动的作用下,两种控制系统均可将速率扰动隔离。对比波形可知,双速度环控制系统的扰动隔离度更高,视轴稳定效果较好,经计算其扰动隔离度在1%以内,而后者的动态调节过程中,扰动隔离度大于5%,扰动隔离度较低。
光电吊舱系统中扰动的成分复杂,扰动作用的形式多样,其中包括稳定运行时突加扰动的情况。为验证控制系统对突加扰动的响应速度和抑制能力,在仿真中设定扰动为幅值为25%伺服电机额定转矩的阶跃力矩扰动,观察吊舱的角速度波形,验证两种控制系统对突加力矩扰动的抑制效果,包括扰动抑制的快速性和平稳性。
由仿真波形可知,在0.20s突加力矩扰动时,双速度环速度控制系统在0.02s的时间内实现扰动抑制,且调节过程平稳,最大转速波动在1.1°/s内。对比单速度环速度控制系统,有明显的调节过程,且调节过程中转速波动已达1.8°/s,波动较大。
本文分析设计的双速度环控制系统的目的是针对速率扰动和力矩扰动的特性,分别对其进行抑制。为了验证速度环对力矩扰动具有隔离效果,将速率扰动和力矩扰动同时加入控制系统,观察吊舱的角速度波形。
对比突加力矩仿真波形可知,双速度环控制系统能够在有力矩扰动和速率扰动共同作用时实现平台视轴的稳定,而单速度环控制系统在运行过程中会有明显的角速度波动,进而影响视轴的稳定精度。
速度控制器不仅需要满足抗扰的要求,而且能够快速跟踪给定且超调尽量小,使控制系统具有快速响应能力。为验证双速度环控制系统和自抗扰稳定控制器的响应能力,在仿真中设置稳定环控制器给定为阶跃角速度信号,观察吊舱某轴的角速度对给定的跟踪情况。
(左)同时加入速率和矩扰动仿真波形。
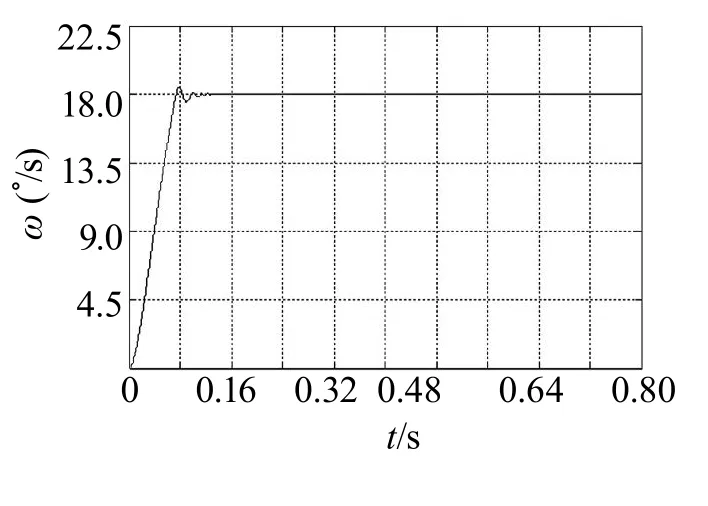
(右)稳定环阶跃响应仿真波形。
从仿真结果看出,在给定幅值为18°/s的阶跃角速度时,双速度环速度控制系统的响应效果较好,在80ms的时间内即达到给定转速,计算得伺服电机的平均角加速度达到225°/s2,满足系统对稳定回路快速性的要求。
以上仿真结果表明,双速度环速度控制系统能够有效实现对力矩扰动和速率扰动的隔离,稳定吊舱的视轴,验证了控制系统结构和参数的合理性,且稳定效果较传统的单速度环速度控制系统有较大的优势。
结束语
本文以无人机光电吊舱控制系统为研究对象,从控制系统结构和控制方法两方面进行了分析,提出了双速度环的控制结构,并针对系统中扰动的特性和作用方式引入了自抗扰稳定控制器,通过仿真和试验验证,实现了提高无人机光电吊舱视轴稳定精度的目的,对无人机侦察能力的增强具有积极有效的作用。 ■