立式罐变形检测中三维点云数据处理方法
2017-06-29张柱柱焦光伟王亚超
张柱柱,焦光伟,王亚超,张 冲
(1.中国人民解放军后勤工程学院 军事供油工程系, 重庆 401311; 2. 78419部队, 重庆 402260)
立式罐变形检测中三维点云数据处理方法
张柱柱1,焦光伟1,王亚超2,张 冲1
(1.中国人民解放军后勤工程学院 军事供油工程系, 重庆 401311; 2. 78419部队, 重庆 402260)
针对常规立式罐变形检测方法劳动强度大、效率低、自动化程度不高等缺点,提出了一种基于三维激光扫描技术的立式罐变形检测方法。分析了基于三维激光扫描技术的立式罐罐体圈板半径、圆柱度、垂直度和高度的计算方法,并使用三维激光扫描仪和全站仪对某立式油罐进行对比试验。试验结果表明:提出的数据处理方法可以准确计算出立式罐变形检测所需尺寸信息,为立式罐变形检测提供了新的途径。
三维激光扫描;立式罐;变形检测;数据处理
立式罐作为储存和检定计量设备,其在长期使用过程中,由于施工质量不高、焊接工艺较差、操作不当等因素,或发生地震、爆炸等灾害,使罐体发生变形,影响立式罐的计量精度,甚至给立式罐的安全运行带来巨大的风险。因此,有必要对立式罐进行变形检测,评估变形对立式罐造成的危害。
常规的立式罐变形检测方法劳动强度大、效率低、自动化程度不高,且对于大型立式罐,受地形限制及储罐间间距较小的影响,致使常规测量手段困难重重。而三维激光扫描技术具有测量时间短、数据量大、精确度高、效率高等优点,目前已经广泛应用到地形测绘、变形监测、文物保护及大型结构设计等众多领域[1-4]。采用三维激光扫描技术,既可以提高立式罐变形测量的效率,又可以保证测量的精度。
立式罐变形检测涉及的罐体尺寸数据主要有圈板半径、倾斜度、圆柱度、垂直度和高度等。本文介绍了基于三维激光点云数据的水平截面圆拟合、罐体倾斜度、圆柱度、垂直度和高度的计算方法,通过现场试验对该方法进行了验证,并使用全站仪与三维激光法进行了对比分析。
1 三维点云数据处理方法
1.1 水平截面圆拟合计算方法
1.1.1 加权平均法
加权平均法在坐标平均值法的基础上引入权数,以克服坐标平均值法求得的圆心坐标会向数据点密集的方向偏移,且求出的半径值偏小的不足。设所有相邻数据点之间的弧长之和为L,数据点(xi,yi)与相邻两点的弧长之和为li。计算拟合圆圆心和半径时的权数为li/(2×L),则圆心坐标(xc,yc)和半径R可分别由式(1)和式(2)计算得到。由于计算时圆心和半径未知,可用相邻两点间线段长度近似代替弧长进行计算[5]。
(1)
(2)
1.1.2 加速迭代法

(3)

1.1.3 等效面积法
等效面积法采用积分思想,将由数据点组成的多边形面积近似代替水平截面圆的面积,再计算得到水平截面圆的半径[7]。首先计算出水平截面点云数据的重心坐标,相邻两个数据点与重心构成一个三角形,根据式(4)可依次连续计算相邻三角形的面积,所有三角形面积之和即为水平截面的面积,再由式(5)计算水平截面圆的半径R。
(4)
(5)
1.1.4 最小二乘法
最小二乘法寻求一个函数来逼近数据,使整组数据的误差达到最小。设(xi,yi)为水平截面点云数据点坐标,(xc,yc)为拟合圆圆心坐标,R为拟合圆半径,Q为误差平方和。当Q值最小时,即可求得拟合圆的圆心坐标及半径。
(6)
(7)
1.2 倾斜度计算方法
方法1 由各层圈板1/4和3/4位置处水平截面圆圆心坐标,计算各层圈板倾斜度。
对各层圈板1/4和3/4位置的水平截面进行拟合计算,得到水平截面圆圆心坐标(x1/4,y3/4)。由式(8)计算各层圈板1/4和3/4位置水平截面圆的坐标水平偏差,两圆心高差为dHi,由式(9)计算该层圈板的倾斜度[9]。
(8)
(9)
方法2 以较小间隔将罐体分成多个小圆柱体,计算每个小圆柱体的倾斜度。
对立式罐罐体进行水平截面时,利用三维激光点云数据量大的特点,以较小间隔将罐体分成多个小圆柱体[10]。由水平截面圆拟合计算得各层截面圆的圆心和半径,根据式(10)计算相邻两截面圆心坐标的坐标差。两圆心的高差为h0。由式(11)计算得各小圆柱体的倾斜度。
(10)
(11)
方法3 计算各小圆柱体倾斜度的平均值。
将方法2中计算得的各小圆柱体的倾斜度,取其平均值作为罐体的整体倾斜度[11]。
(12)
方法4 计算各层圈板1/4和3/4位置处水平截面圆圆心所在拟合直线的倾斜度。
拟合计算各层圈板1/4和3/4位置的水平截面圆圆心坐标。采用最小二乘法[12],由各水平截面圆圆心坐标拟合罐体的母线,其与铅垂线的夹角即为罐体的整体倾斜度[13]。
(13)
(14)
方法5 计算以较小间隔获得的水平截面圆圆心所在拟合直线的倾斜度。
利用三维激光扫描技术数据量大的特点,以较小的间隔截取水平截面圆,拟合计算各层水平截面圆圆心及半径。采用最小二乘法,由各水平截面圆圆心坐标拟合罐体母线,其与铅垂线的夹角即为罐体的整体倾斜度。
1.3 圆柱度计算方法
根据水平截面圆的拟合结果,计算水平截面上所有点到圆心的距离。点到圆心的距离与截面圆半径的最大偏差即为圆柱度F。
(15)
1.4 垂直度计算方法
罐壁垂直度是罐壁面相对于罐底铅垂面的倾斜程度。过圆心截取罐壁竖直截面,采用最小二乘法将截取的点云数据拟合成直线,其与铅垂线的夹角θ即为该罐壁处的倾斜角(图1)。立式罐高度为H,由式(16)计算得罐壁垂直度G。

(16)
图1 罐壁垂直度
1.5 高度计算方法
选取立式罐底部边界点,沿罐壁做垂线,量取罐壁的垂直高度,取平均值作为最终的罐体高度[14]。
2 试验数据计算处理
选取某500 m3立式拱顶油罐作为试验对象。该立式罐直径约9 m,高度约8.9 m,共有7层圈板。采用PENTAX S-3180V三维激光扫描仪和Leica FlexLine TS02 Plus全站仪对其进行了测量。使用Matlab软件编制程序,对测量数据进行了计算处理。
2.1 水平截面圆计算方法结果与全站仪结果对比
分别采用加权平均法、加速迭代法、等效面积法和最小二乘法4种水平截面圆拟合计算方法对三维激光点云数据进行了计算处理,并将结果与全站仪数据计算结果进行比较。计算结果对比如表1所示。

表1 4种水平截面圆拟合计算结果与全站仪数据计算结果比较 m
从表1中可以看出:加权平均法、加速迭代法和最小二乘法的计算半径与全站仪数据拟合结果的最大偏差分别为1.2、1.6和1.5 mm,说明这3 种方法均可以准确地拟合出水平截面圆半径。
等效面积法的计算半径与全站仪数据拟合结果的最大偏差达到了4.5 mm。分析其原因为:等效面积法的原理是用点云数据点组成的多边形面积代替圆面积来计算半径,获得的半径要比实际的半径小,且对数据点数量要求较高。水平截面上的数据点越多,等效面积法求得的面积越接近圆面积。在本次试验中,将三维激光扫描仪的分辨率设置为中等,共测得100万个数据点,每个水平截面上只有约90个数据点。若想提高等效面积法的精度,则要提高三维激光扫描仪的分辨率,使水平截面包含更多的数据点。
2.2 倾斜度计算结果
由方法1可计算得各层圈板的倾斜度,结果见表2。从表2中可以判断各层圈板的倾斜状态。
以0.2 m为间隔,将罐体分割成43个小圆柱体,由方法2计算获得43个小圆柱体的倾斜度,计算结果见表3。

表2 倾斜度方法1计算结果
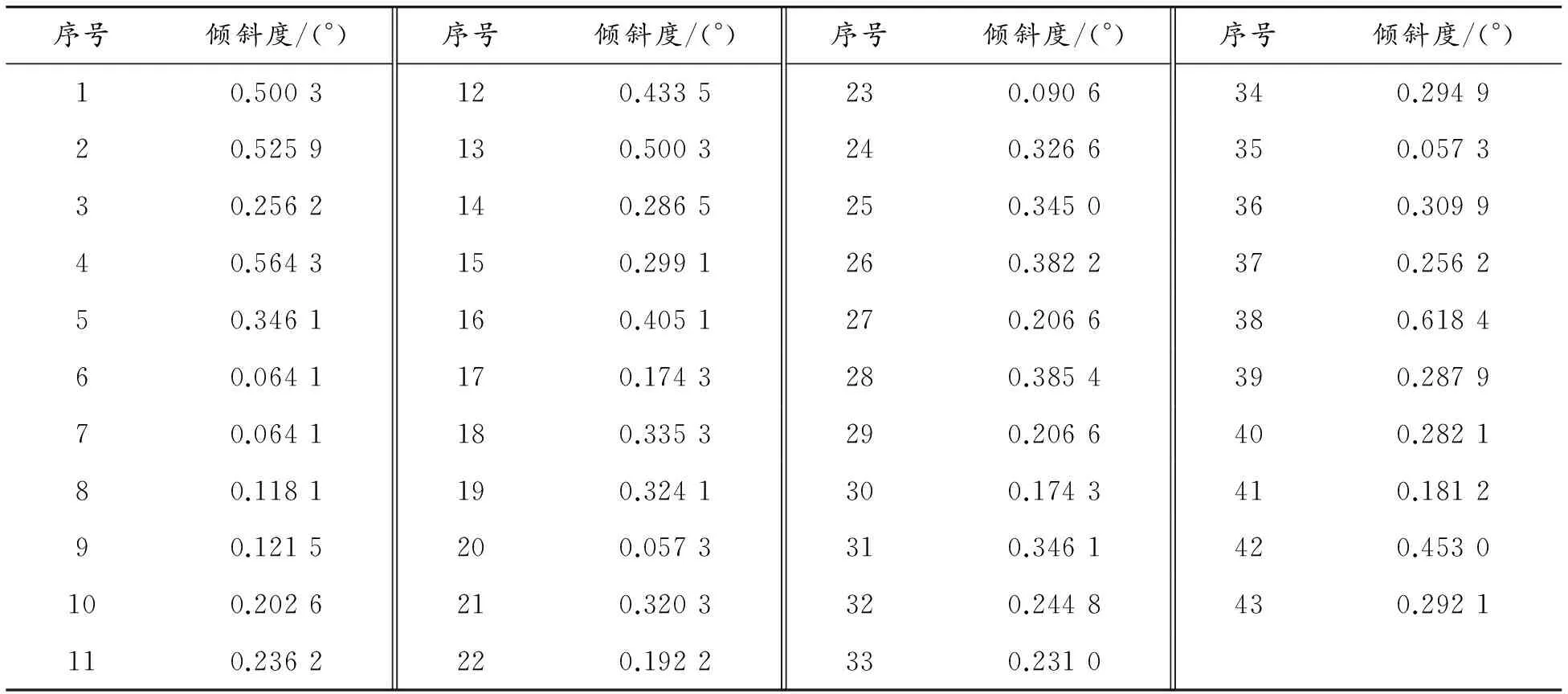
表3 倾斜度方法2计算结果
方法1和方法2都是将罐体分成数个部分,分别计算每个部分罐体的倾斜度。方法1通过各层圈板1/4和3/4位置的水平截面圆圆心坐标计算各层圈板的倾斜度,方法2则发挥三维点云数据量大的特点,以更小的间隔将罐体分成43个小圆柱体,更为具体地描述了罐体的倾斜变化,其倾斜度变化如图2所示,从中可以直观地看出罐体在不同高度处的倾斜度变化情况。

图2 罐体倾斜度随高度变化
方法3、方法4和方法5都是计算罐体的整体倾斜度。方法3直接将方法2中计算所得的小圆柱体倾斜度取平均值作为罐体整体的倾斜度。由于每个小圆柱体的倾斜方向各不相同,取平均值的做法并不能准确表示罐体整体的倾斜度。而方法4和方法5则通过拟合水平截面圆心所在的空间直线来计算倾斜度,可以更加准确地表达罐体整体的倾斜度。方法5参与直线拟合计算的水平截面更多,结果也更加准确。计算结果见表4。
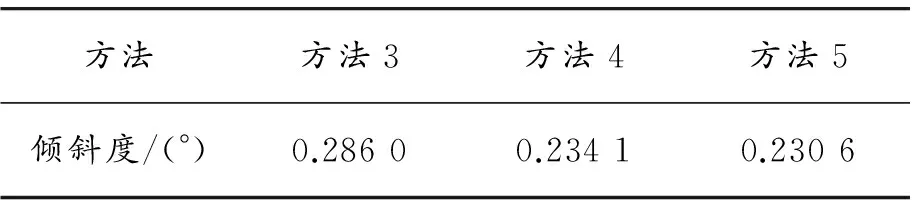
表4 不同罐体整体倾斜度计算方法结果
2.3 圆柱度计算结果
SY/T 5921—2011《立式圆筒形钢制焊接油罐操作维护修理规程》规定在底圈罐壁1 m高处,半径偏差不应超过±13 mm,在底圈罐壁1 m高以上,测得的半径偏差不应超过±39 mm。从表5中可以看出:罐壁44个水平截面均未超过规范的允许值,说明罐壁整体的圆柱度较好。
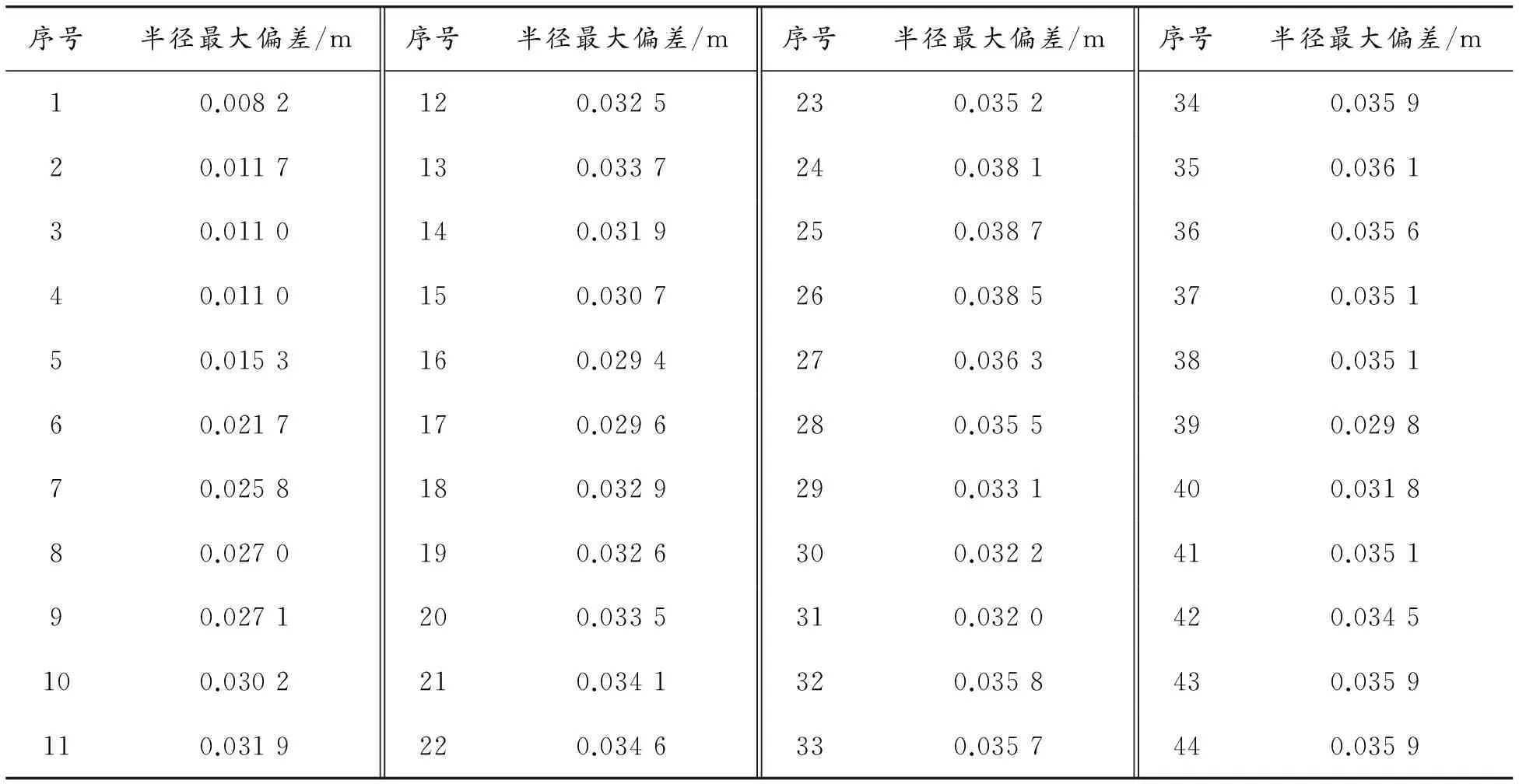
表5 圆柱度计算结果
以5号截面为例,经过计算,得到5号水平截面半径偏差最大点坐标为(18.880 7,-1.263 5,-0.888 5),该点位置如图3所示。从图3中可以看出:5号水平截面上偏差最大点位于罐壁垂直焊缝处,焊缝处的凸起使计算得的半径偏差值偏大,与实际情况相符。

图3 5号截面半径偏差最大点位置图
2.4 垂直度计算结果
过圆心截取8个罐壁竖直截面,计算得截面处的罐壁垂直度,见表6。可见计算得到的垂直度均小于罐壁高度的0.4%,满足规范要求。
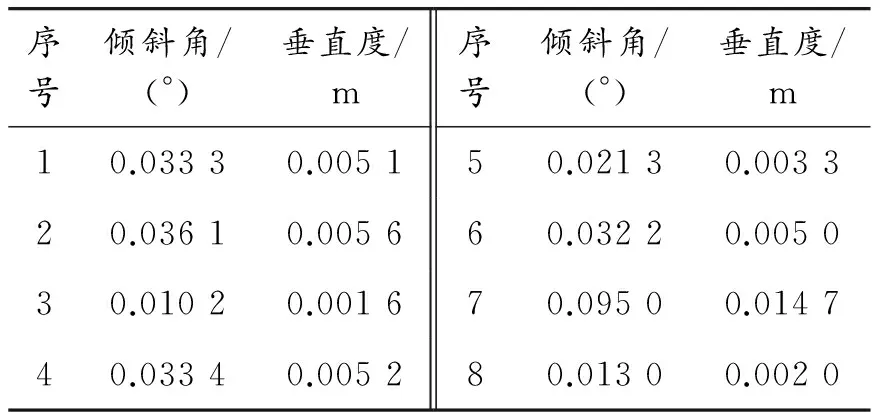
表6 罐壁垂直度计算结果
2.5 高度计算结果
在Polyworks软件中,选取立式罐底部边界点,沿罐壁做垂线,量取罐壁的垂直高度。共测量8次(如图4所示),取平均值作为最终的罐体高度,结果见表7,计算得罐体高度为8.870 3 m。
图4 罐体高度测量

序号12345678平均高度/m8.87328.85458.87848.85588.89588.85338.85798.89358.8703
3 结束语
本文对比分析了基于三维激光扫描技术的立式罐罐体水平截面圆拟合、倾斜度、圆柱度、垂直度和高度的计算方法,并使用三维激光扫描仪和全站仪进行了对比试验,结果表明:三维激光扫描法检测立式罐变形效率高、精度高,且能够检测出罐体的微小变形,为基于三维激光扫描技术的立式罐变形检测提供了数据处理的方法。
目前立式罐变形检测规范都是基于传统的测量方法,针对三维激光扫描法这种新的测量方法还没有具体的规范,还需进一步的研究。
[1] 宋振.三维激光扫描仪大容量计量数据处理方法与软件开发[D].杭州:中国计量大学,2014.
[2] 周俊召,郑书民,胡松,等.地面三维激光扫描在石窟石刻文物保护测绘中的应用[J].测绘通报,2008(12):68-69.
[3] 刘昌军,赵雨,叶长锋,等.基于三维激光扫描技术的矿山地形快速测量的关键技术研究[J].测绘通报,2012(6):43-46.
[4] 戴华阳,廉旭刚,陈炎,等.三维激光扫描技术在采动区房屋变形监测中的应用[J].测绘通报,2011(11):44-46.
[5] 宋振,郝华东,周晓雪,等.基于三维激光扫描仪法的大型立式罐容量的计量[J].油气储运,2013,32(12):1367-1373.
[6] 徐国旺,廖明潮.拟合圆的几种方法[J].武汉工业学院学报,2002(4):104-106.
[7] 陈贤雷,郝华东,李红军,等.大型立式罐容量计量中三维激光扫描方法研究[J].中国测试,2014,40(2):44-48.
[8] 王金涛,刘子勇,张珑,等.基于点云分析的大型立式液态石化产品储罐容量计量方法研究[J].计量学报,2011,32(2):110-103.
[9] 陈伟,郝华东,李东升,等.激光扫描立式罐倾斜测量新方法研究[J].中国测试,2015,41(2):22-26.
[10]宋振,裴润有,张洪军,等.立式罐容量计量中三维激光扫描法研究[J].中国测试,2014(6):22-26.
[11]张玉平,陶彬,郎需庆,等.大型储罐变形评估技术研究及应用[J].安全、健康和环境,2014,14(5):43-47.
[12]韩庆瑶,肖强,乐英.空间离散点最小二乘法分段直线拟合的研究[J].工业仪表与自动化装置,2012(4):107-109.
[13]贾勇帅,独知行,郭巍,等.大型储油罐变形数据处理与分析[J].城市勘测,2015(6):117-120.
[14]张文新.三维激光扫描技术在大型油罐罐体尺寸测量中的应用研究[J].兰州工业学院学报,2015,22(1):63-67.
(责任编辑 陈 艳)
Processing Method of Three-Dimensional Point Cloud Data in Vertical Tank Deformation Monitoring
ZHANG Zhu-zhu1, JIAO Guang-wei1, WANG Ya-chao2, ZHANG Chong1
(1.Department of Petroleum Supply Engineering, Logistic Engineering University, Chongqing 401311, China; 2.The No. 78419thTroop of PLA, Chongqing 402260, China)
We proposed a method of vertical tank deformation detection based on three-dimensional laser scanning technology because of the defects of the conventional vertical tank size measuring method, such as labor intensive, low efficiency and low degree of automation. The calculation methods of circular cross-section fitting, inclination, cylindricity, verticality and height of the vertical tank based on three-dimensional laser scanner were analyzed. And using three-dimensional laser scanner and total station, we had compared experiment to a vertical tank. The results show that the proposed methods can accurately calculate the size data of the vertical tank deformation monitoring. It provides a method of data processing of the vertical tank deformation monitoring.
three-dimensional laser scanning; vertical tank; deformation monitoring; data processing
2016-12-18 基金项目:总后军需物资油料部技术开发项目(BX210J026 )
张柱柱(1992—),男,江苏泗阳人,硕士硕士生,主要从事油气储运技术与装备方面的研究,E-mail:zzz0608@vip.qq.com。
张柱柱,焦光伟,王亚超,等.立式罐变形检测中三维点云数据处理方法[J].重庆理工大学学报(自然科学),2017(5):68-74.
format:ZHANG Zhu-zhu, JIAO Guang-wei, WANG Ya-chao,et al.Processing Method of Three-Dimensional Point Cloud Data in Vertical Tank Deformation Monitoring[J].Journal of Chongqing University of Technology(Natural Science),2017(5):68-74.
10.3969/j.issn.1674-8425(z).2017.05.012
TE972
A
1674-8425(2017)05-0068-07
