一种六自由度分离体机构运动学分析及仿真
2017-06-29缑双双蹇开林
缑双双,蹇开林
(重庆大学 航空航天学院,重庆 400044)
一种六自由度分离体机构运动学分析及仿真
缑双双,蹇开林
(重庆大学 航空航天学院,重庆 400044)
针对风洞捕获轨迹试验六自由度分离体机构的结构和运动特点,以机器人D-H方法理论为基础,得到分离体机构的连杆坐标简图和运动学参数,建立了该分离体机构的运动学模型。采用矩阵变换得到运动学正解,并将正解得到的尾支杆处坐标系和分离体机构基坐标系的位姿关系通过变换矩阵转换成末端外挂物模型理论质心坐标系和风洞固定坐标系的位姿关系,然后利用变量分离法得到运动学逆解。最后,通过Matlab软件编写程序,所得结果与ADAMS软件运动学仿真结果进行比较,验证了理论推导的正确性。
分离体机构;运动学;正逆解;D-H变换;仿真分析
风洞捕获轨迹试验(captive trajectory system,CTS)又称可控轨迹试验。在飞行器的研制过程中,为解决外挂物从其母机上分离之后不至于撞击到母机或其他邻近外挂物而危及母机的安全问题,迫切地需要了解和确定外挂物在离开母机初始阶段的运动轨迹特性,为外挂物在其母机上的合适布局和投放参数控制提供可靠的依据[1]。因此,捕获轨迹试验是飞行器研制过程中一项必不可少的实验项目。美国从20世纪50年代开始了该技术的应用,英国、法国从20世纪70年代开始该实验技术的研究与应用。中国空气动力研究与发展中心于1980年利用1.2 m跨超声速风洞研制了第1套高速风洞捕获轨迹试验系统,并于1988年投入使用,完成了大量型号试验,对我国飞行器的研制做出了重要贡献[2]。
捕获轨迹系统的主体机构是一个由计算机系统控制的支撑外挂物模型的六自由度分离体机构。外挂物模型内装有六分量应变天平,主机模型由风洞内的主支撑系统支撑,独立于主机支撑系统的外挂物模型支撑杆从属于CTS机构做六自由度运动。由于分离体机构是外挂物模型的支撑装置及其运动的执行机构[3],是整个系统的核心,因此对其运动学的研究也是捕获轨迹试验能够顺利进行的前提。本文首先用D-H方法建立了分离体机构的运动学模型,求出了该机构的运动学正逆解[4],并用Matlab编写正逆解程序,将计算结果与ADAMS中的运动学仿真结果进行对比,验证了理论推导过程的正确性,为捕获轨迹试验的顺利进行提供保障。
1 分离体机构运动学分析
1.1 分离体机构简介
分离体机构是一个串联六自由度机构,由Z向运动机构、X向运动机构、偏航机构、Y向运动机构、俯仰运动机构、滚转机构6层子机构构成。尾支杆末端能实现沿着X、Y、Z的平移和俯仰、偏航、滚转[4]。其中机构的3个平移自由度和俯仰、偏航两个转动自由度在风场之外,滚转自由度在风场之内。
分离体机构中有1个伺服电机驱动和5个滚转丝杠驱动,其中X、Y、Z向的平移自由度直接由滚珠丝杠驱动实现。偏航自由度和俯仰自由度由滚珠丝杠的驱动通过圆弧导轨转换到旋转驱动[5],最终实现机构的偏航和俯仰。滚转自由度由伺服电机的驱动直接实现。
1.2 分离体机构运动学正解
在分离体机构中,偏航和俯仰通过直线变圆弧的方式实现,可简化成直线驱动和旋转驱动的一个关系式,不影响后续机构的运动学分析,本文不做详述,直接将偏航和俯仰按照旋转驱动来考虑。
给定分离体机构的6个关节位移,其中包括3个线位移、3个角位移,然后求解外挂物模型理论质心在风洞固定坐标系中的位置,这是求运动学正解的过程。根据分离体机构的结构特征,将其简化,得到的分离体简化模型如图1所示。按照D-H表示法[6]可以建立分离体的连杆坐标系,各连杆参数[7]和关节变量如表1所示。

图1 分离体机构简图

连杆iai/mmαi/(°)di/mmθi/(°)运动范围/(mm/°)1a190°d1(变量)90°-350~3502a2-90°d2(变量)-90°-400~4003a30°0θ1(变量)-15~154a490°d4(变量)180°-α-350~6005a5-90°d5θ5(变量)-25~25600°0θ6(变量)-300~300
表1中:ai为连杆长度;αi为连杆转角;di为偏距;θi为关节扭角。那么,由D-H变换原则可知坐标系{i}相对于{i-1}系的变换矩阵为
(1)
式中si=sinθi,ci=cosθi,sαi=sinαi,cαi=cosαi。
将表1中的参数代入式(1)中,得到各连杆坐标的变换矩阵:
因此,尾支杆处坐标系{6}相对于分离体机构基坐标系{0}的变换矩阵为
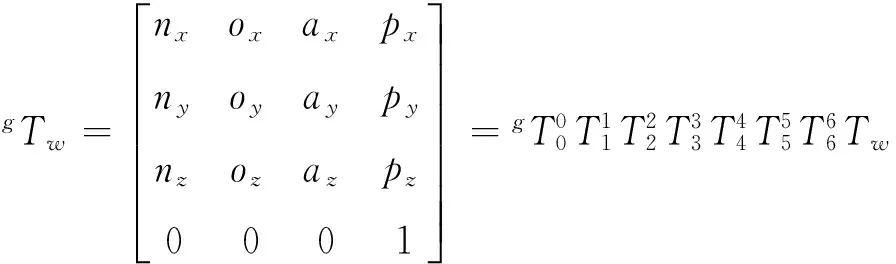
上述D-H变换得到的0T6是分离体机构基坐标系到尾支杆坐标系的转换矩阵。捕获轨迹试验最终需要得到外挂物模型理论质心在风洞固定坐标系中的位姿,所以还需要建立外挂物模型理论坐标系{w}和风洞固定坐标系{g},见图2。
分离体基座标系相对于风洞固定坐标系的转换矩阵为gT0,外挂物模型理论质心坐标系相对于尾支杆末端坐标系的转换矩阵为6Tw,根据坐标系之间的关系,可得到
式中:(x0,y0,z0)表示{0}系原点在{g}系中的位置;(x1,y1,z1)表示{w}系原点在{6}系中的位置。则外挂物模型理论质心坐标系{w}相对于风洞固定坐标系{g}的变换矩阵
(2)
将式(2)中参数进一步整理,有
nx=-s5s3-α,ox=-s6c3-α-c5c6s3-α
ax=c5s6s3-α-c6c3-α
px=d2+x0+x1s6c3-α+c5c6s3-α+y1c6c3-α-c5s6s3-α-d5c3-α-a3s3-z1s5s3-α+a4s3-α+a5c5s3-α
ny=c5,oy=-s5c6,ay=s5s6
py=a1+d4+y0+a5s5+z1c5+x1s5c6-y1s5s6
nz=-s5c3-α,oz=s6s3-α-c5c6c3-α
az=c6s3-α+c5s6c3-α
pz=d1-a2+z0-x1s6s3-α-c5c6c3-α-y1c6s3-α+c5s6c3-α+d5s3-α-a3c3-z1s5c3-α+a4c3-α+a5c5c3-α
其中:s3-α=sin(θ3-α),c3-α=cos(θ3-α),si=sinθi,ci=cosθi,(i=3,5,6)
gTw描述了{w}相对于{g}的位姿。该矩阵中:n、o、a代表了外挂物模型理论质心相对于风洞固定坐标系的姿态;p则代表了外挂物模型理论质心在风洞固定坐标系中的位置。
姿态广义坐标有多种描述方法[8],在风洞捕获实验中采用的是y-z-x欧拉角,得到的姿态矩阵为
(3)
式中:cθ=cosθ,sθ=sinθ,cψ=cosψ,sψ=sinψ,cγ=cosγ,sγ=sinγ。
由此可见,给定欧拉角也可以求旋转矩阵,同样,给定旋转矩阵可以求出相应的欧拉角。
ψ=atan2(-nz,nx)
(4)
所以,给定任意关节位移(d1,d2,θ3,d4,θ5,θ6),可以唯一确定gTw,则外挂物模型在风洞中的位置r=(px,py,pz),姿态采用y-z-x欧拉角表示,φ=(ψ,θ,γ)。
1.3 分离体机构运动学逆解
捕获轨迹实验,需要根据末端外挂物模型的位姿来求解六自由度分离体机构各关节的位置,然后由电机驱动机构运动,最终使得末端外挂物模型到达指定的位姿,这属于运动学求逆问题[9]。实验时,由程序快速计算出捕获轨迹的位姿,此时模型的姿态矩阵n、o、a和位置向量p已知,因此有位姿矩阵:
(5)
令式(6)、(7)中对应元素相等,有:
(8)
d4=py-a1-y0+a2y1+oyx1-nyz1-a5s5
(9)

(10)
(11)
d1=pz-z0+azy1+ozx1-nzz1-d5s3-α+a2+a3c3-a4c3-α-a5c5c3-α
(12)
d2=px-x0+axy1+oxx1-nxz1+d5c3-α+a3s3-a4s3-α-a5c5s3-α
(13)
从式(8)~(13)可以看出:分离体机构的3个转角的角位移只与模型的姿态有关,而线位移既跟模型的位置有关也与模型的姿态有关。逆解中,除了θ5有2个解,其他关节位移都有唯一解,如果对θ5取值范围做出规定,那么就可以唯一确定位姿和关节位移的对应关系。
2 分离体机构运动学仿真
分离体机构初始时刻处于零位状态,该位置的关节位移值为分离体机构各关节变量的初始值,取值为(517,-407,90,1302,-90,0)。在运动过程中,分离体机构的各关节实际位移是各个关节变量在初始值上的增加,所以代入矩阵运算中的位移值是分离体机构在各个位置相对于零位的位移加上零位时的初始值。因此,分离体机构关节1至关节6的位移值分别为(517+d1,-407+d2,90+θ3,1302+d4,-90+θ5,θ6)。
使用Matlab编写分离体机构运动学程序,其中连杆参数取值如下:a1=279,a2=622,a3=658,a4=637,a5=0,d5=165,α=arctan(165/658),(x0,y0,z0)=(-1 000, 1 023, 105),(x1,y1,z1)=(0,0,100)。
关节输入中变量取值如下:
(14)
利用Matlab编写运动学程序仿真,仿真时间为12 s,仿真结果见图2、3。

图2 Matlab下外挂物位置
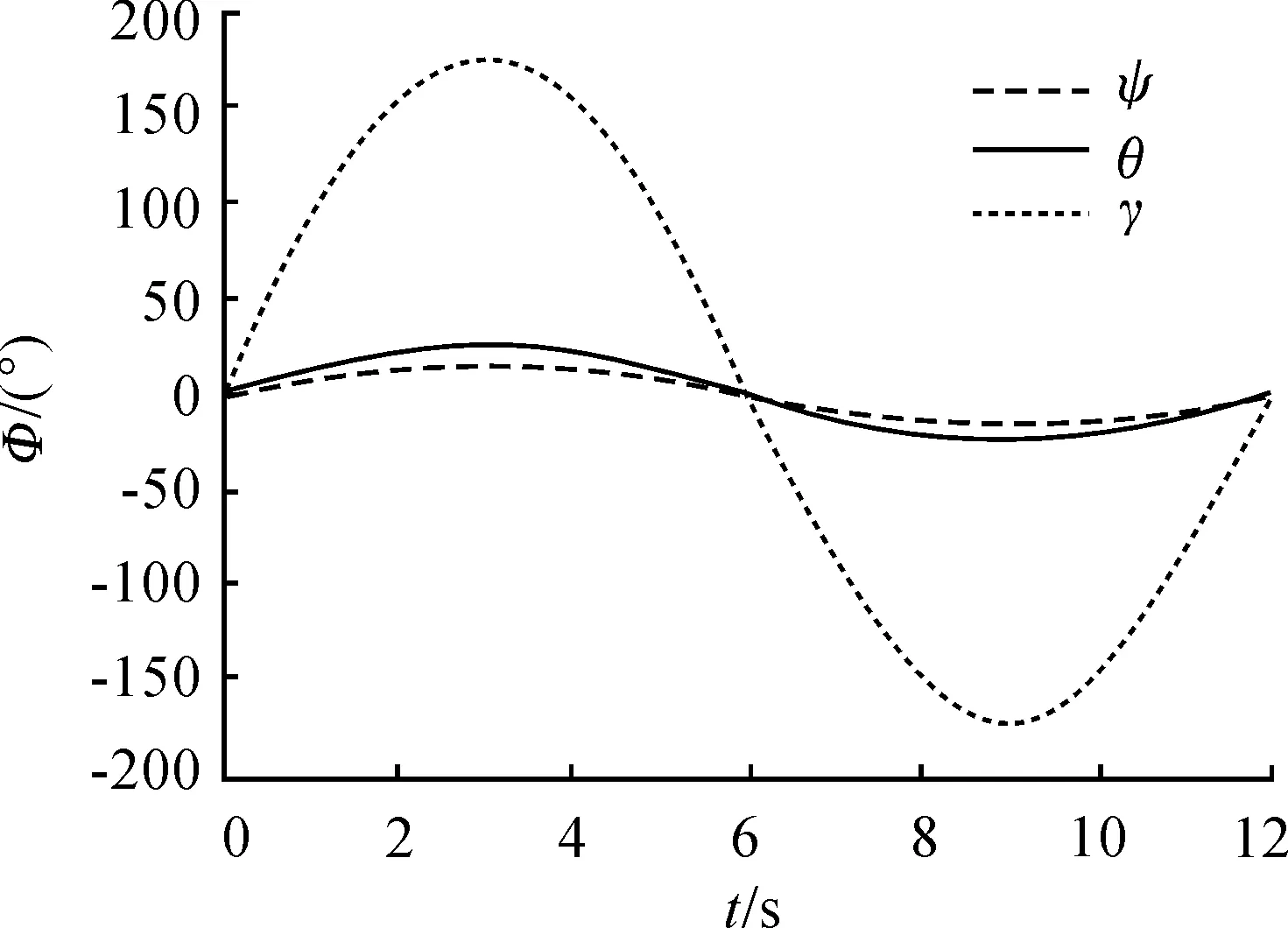
图3 Matlab下外挂物姿态
将模型导入ADAMS,利用ADAMS进行运动学仿真[10],驱动输入值同式(14),仿真时间为12s,仿真结果见图4、5。
对比Matlab和ADAMS得到的位移、姿态曲线图可发现:两种计算所得结果十分吻合。
此外,为验证正逆解运算过程是否可逆,在Matlab软件GUI中,分别编写运动学正逆解界面。正解给定任意一组关节位移作为输入,计算外挂物模型理论质心在风动固定坐标系中的位姿,逆解输入正解所得位姿,计算各关节位移,结果见图6、7。

图4 ADAMS下外挂物位置
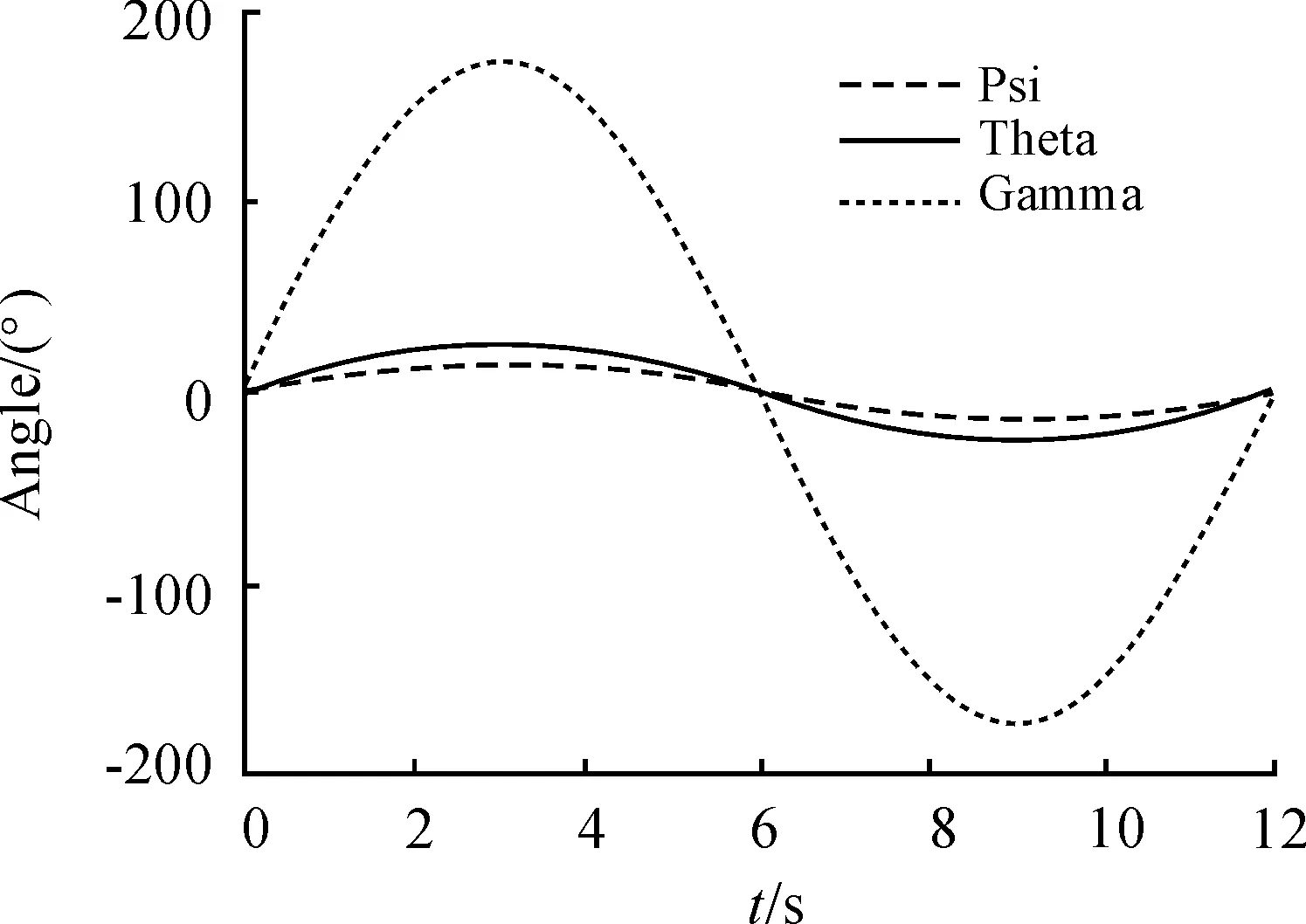
图5 ADAMS下外挂物姿态

图6 运动学正解
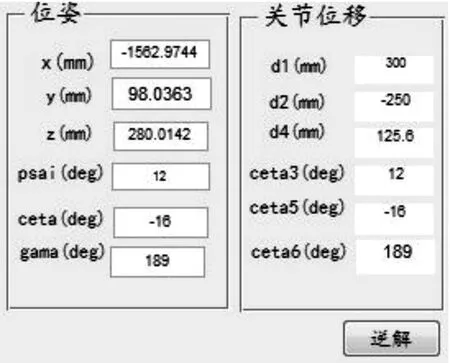
图7 运动学逆解
由图7可见:逆解得到的关节位移与正解输入的关节位移完全相同,证明正逆解运算过程是可逆的。
3 结束语
本文利用D-H方法,建立了六自由度分离体机构的连杆简图,得到D-H参数,通过矩阵变换得到运动学正解,并利用变量分离法得到运动学逆解。最后利用Matlab编程计算,并与在ADAMS中运动学仿真得到的结果进行比较,验证了理论推导的正确性,确保了计算结果的准确性和可靠性。风洞捕获轨迹试验需要给定末端外挂物模型的位姿,然后由逆解计算关节位移,驱动机构运动,最终使得机构到达给定的位姿。因此,本文运动学分析为捕获轨迹试验的顺利进行提供了保障,也为后续工作空间的规划和机构的误差补偿工作奠定了基础。
[1] 谭兴强,谢志江,岳茂雄.CTS实验六自由度机械手快速跟踪插补控制方法研究[J].现代科学仪器,2012(3):25-29.
[2] 黄叙辉,庞旭东,宋斌.1.2 m跨超声速风洞新型捕获轨迹系统研制[J].实验流体力学,2008,22(2):95-98.
[3] 李周复.风洞特种试验技术[M].北京:航空工业出版社,2010.
[4] 董生权,丁亮,尤波,等.基于PMAC的SCARA机器人运动控制研究[J].重庆工学院学报,2005,19(11):51-54.
[5] 黄志杰.分离体机构运动学和动力学分析[D].重庆:重庆大学,2014.
[6] 苏豪,薛方正.关节型机器人通用仿真平台设计[J].重庆理工大学学报(自然科学),2012,26(6):82-88.
[7] 程立艳,费凌,苏泽郎.基于MATLAB五自由度机械手运动学仿真分析[J].机械研究与应用,2011(4):12-14.
[8] 龚星如.六自由度工业机器人运动学标定的研究[D].南京:南京航空航天大学,2012.
[9] 赵献丹,赵虎.六自由度串联机械手运动学逆解研究[J].现代制造技术与装备2010(3):11.
[10]余晓流,刘进福,汪丽芳,等.基于ADAMS的六自由度焊接机器人运动学分析及仿真[J].安徽工业大学学报(自然科学版),2012,29(1):49-53.
(责任编辑 陈 艳)
Kinematics Analysis and Simulation of a 6-DOF Separation Mechanism
GOU Shuang-shuang, JIAN Kai-lin
(College of Aerospace Engineering, Chongqing University, Chongqing 400044, China)
According to the structure and motion features of the 6-DOF separation mechanism of the Captive Trajectory System, based on the theory of robot D-H method, the link frames and the kinematic parameters of separation mechanism were gotten and the kinematic model was built. The forward kinematics solution was derived by using matrix transformation method, and the pose relation between the tail sting coordinate system and base coordinate system of the separation mechanism was changed into the pose relation between the store coordinate system and the wind tunnel fixed coordinate system by using transformation matrix, and then the separation of variable was used to solve the inverse kinematics solution. Finally, through the Matlab software program, the results obtained with the ADAMS software kinematics simulation results were compared to verify the correctness of the theoretical derivation.
separation mechanism; kinematics; forward and inverse solution; D-H transform; simulation analysis
2017-01-03 基金项目:国家自然科学基金委员会和中国工程物理研究院联合基金资助项目(11176035)
缑双双(1991—),女,陕西渭南人,硕士研究生,主要从事结构设计及其优化研究,E-mail:goushuangs@163.com。
缑双双,蹇开林.一种六自由度分离体机构运动学分析及仿真[J].重庆理工大学学报(自然科学),2017(5):43-48.
format:GOU Shuang-shuang,JIAN Kai-lin.Kinematics Analysis and Simulation of a 6-DOF Separation Mechanism[J].Journal of Chongqing University of Technology(Natural Science),2017(5):43-48.
10.3969/j.issn.1674-8425(z).2017.05.008
V211.72;TH113.2+2
A
1674-8425(2017)05-0043-06
