一种用于异步电机无速度传感器控制的自适应滑模观测器
2017-05-18高艳霞陈静范应鹏宋文祥
高艳霞, 陈静, 范应鹏, 宋文祥
(上海大学 机电工程与自动化学院,上海 200072)
一种用于异步电机无速度传感器控制的自适应滑模观测器
高艳霞, 陈静, 范应鹏, 宋文祥
(上海大学 机电工程与自动化学院,上海 200072)
针对异步电机无速度传感器中存在的对参数变化鲁棒性差的问题,研究了一种基于自适应滑模观测器的异步电机无速度传感器的矢量控制方案。自适应滑模观测器根据电机静止坐标系下的数学模型构造了转子磁链观测器,定子电流观测值与实际值的误差构成观测器的滑模面,在滑模运动下该观测器的观测值最终趋近于实际值,从而实现转子磁链的估计。电机转速由自适应方法估算得到,滑模观测器的稳定性可由李雅普诺夫稳定性证明。与其他方案相比,该方法的优点在于实现简单,对参数变化具有鲁棒性。仿真和实验对控制方案的正确性和可行性给出了验证,该观测器可以实现对转子磁链和转速的观测,且在负载扰动和给定转速变化的情况下该滑模观测器具有鲁棒性。
异步电机;自适应滑模观测器;无速度传感器;矢量控制;鲁棒性
0 引 言
异步电机的低成本、高可靠性,使其有广泛的应用。矢量控制尤其是转子磁场定向矢量控制是当前应用广泛的一种经典异步电机驱动控制策略。在此基础上,无速度传感器矢量控制技术因其去除了编码器,从而大大提高了交流传动系统的可靠性,降低了系统的实现成本。准确计算转子磁链和辨识电机转速是实现无速度传感器矢量控制的关键。
由于异步电机转子磁链的直接测量十分困难,通常需要通过间接观测计算获得。目前,计算磁链的方法大致分为两类,理想模型和非理想模型。非理想模型中,有齿谐波法和信号注入法[1]。文献[1]在低速和零速运行状态下,提出了磁场凸极反应理论。这些方法是依赖于电机对高频信号注入的响应,其中的凸极效应依赖于磁场饱和和电机的几何结构。这对测量的精准度要求很高,增加了矢量控制系统的软硬件的复杂度。而且,当电机的凸极效应不明显时,不足以使电机产生恰当的响应,需要合适的机械设计构造以增强凸极效应。理想模型中,有开环模型法和闭环模型法。开环模型分为电流模型法和电压模型法[2]。其中,电流模型法受电机参数变化的影响较大,一般仅用于低速阶段;而电压模型法,因其存在积分运算问题,一般用于中高速运行阶段。有时为提高准确度,把这两种模型结合起来,在低速时采用电流模型,在中高速时采用电压模型[3]。闭环模型中,分为模型参考自适应、全阶观测器[4]、扩展卡尔曼滤波器[5]、扩展龙伯格法以及滑模观测器等。文献[4]利用极点配置的方法对全阶观测器的反馈增益矩阵进行设计,加快了估计误差的收敛速度。文献[5]提出了一种基于抗差扩展卡尔曼滤波器的磁链和转速估计方法,探讨了在应用于感应电机转速估计时抗差扩展卡尔曼滤波器能否同样取得良好的估计精度,以期提高磁链和转速观测的准确性。文献[6]从稳态精度、动态性能、低速运行、参数敏感性、噪声敏感性和复杂性等方面对龙贝格观测器,滑模观测器和扩展卡尔曼滤波器进行了综合分析和比较,三种观测器在高速时稳态性能指标相差不大,其中,扩展卡尔曼滤波器具有最好的噪声敏感性,龙贝格观测器实用性最佳,但在参数敏感性和鲁棒性方面,滑模观测器性能明显优于龙贝格观测器和扩展卡尔曼滤波器。在这些方案中,滑模观测器由于自身具有实现简单,对系统干扰、参数变化和系统噪音具有鲁棒性的特点,近些年来成为转子磁链观测的研究热点[7-13,15]。
本文研究了一种转速自适应滑模观测器(sliding mode observer,SMO),用于异步电机的矢量控制系统中。通过检测电机定子电流和定子电压作为观测器的输入,构造以定子电流估算误差为滑模面的滑模观测器,实现对电机转子磁链的估算。电机转速则通过自适应方法得到。最后,该观测器通过仿真和实验验证了其可行性和有效性。
1 异步电机的数学模型
在静止参考坐标系αβ下,选择电机定子电流、转子磁链作为状态变量,异步电机的状态方程可表示为:
px=Ax+Bvs。
(1)
式中,x,A,B三个量表示如下:

系统矩阵A,B表示如下:
A11=aI,A12=cI-dJ,A21=cI,





其中:p为微分算子;is为定子电流,is=(isαisβ)T;vs为定子电压,vs=(vsαvsβ)T;ψr为转子磁链,ψr=(ψrαψrβ)T;Rs,Rr为定子电阻和转子电阻;Ls,Lr,Lm为定子电感,转子电感和互感;σ为定子漏磁通系数;σr为转子时间常数;ωr为电机转子角频率。
2 自适应滑模观测器设计
转子磁链估测的滑模观测器建模如下:

(2)
其中,带有“^”的量均为估算值,K为矩阵增益,sgn()表示符号函数。


当存在参数变化时,误差方程表示如下:

(3)

所构造的滑模面为

(4)
由李雅普诺夫稳定性,可得
(5)

ei=pei=0。
(6)
式(3)化为

(7)

(8)

由式(7)和式(8)得,在滑模条件下,转子磁链的误差方程如式(9)所示:

(9)
当转速已知且其他参数不变,则在滑模条件下的转子磁链观测器的误差方程为
peψ=(A22+LA12)eψ。
(10)
当转速为变参数时,则矩阵ΔA中各元素可表示为:


由此构造李雅普诺夫方程如下:

(11)
其中,W是修正项,其作用是保证在李雅普诺夫稳定理论下参数估测的收敛性。
假设:
pV=pV1+pV2。
(12)
其中:

(13)

(14)
且Λ=L-εI。
如果pV1<0并且pV2=0,则pV<0,显然,在这种条件下满足李雅普诺夫稳定性定理。
对于pV1<0,可选择
ΛT=-γA12,γ>0。
(15)
在此基础上,pV2=0使

(16)
由式(16),函数W确定为

(17)
比较式(16)和式(17),得到转速自适应估算方程如下所示:

(18)
这就是李雅普诺夫稳定定义下转速的自适应收敛律,为改善自适应律收敛速度,将自适应律改为比例积分形式[14]。式(19)中,kp,ki分别为比例和积分系数。
(19)
3 转子磁链的收敛性分析
分析转子磁链的收敛性,就是要分析磁链观测误差eψ能不能在有限的时间内收敛到零。重写式(10)为
peψ=Aψeψ。
(20)
其中,Aψ=A22+LA12。
当磁链观测误差的初始值eψ(t0)≠0时,式(20)在时域的解为
eψ(t)=eAψteψ(t0)。
(21)
由式(21)可知,转子磁链的观测误差eψ(t)的衰减速度取决于矩阵Aψ的特征值[14]。如果仅考虑使eψ尽快趋近于零,则应把特征值配置在s平面的左半平面且距虚轴很远的地方。然而这样配置特征值,会使观测器的频带变得很宽,从而降低它对高频噪音的抑制能力。因此,对矩阵Aψ特征值的设计,也即矩阵L的设计,应兼顾到观测器的响应速度和抗干扰的要求。
由式(15)可知,矩阵L满足l11=l22,l12=-l21,即对角线上的元素相等,副对角线的元素为相反数,则矩阵Aψ的元素也具有这样的特征。因此,可以令Aψ为如下形式,其中α和β为实数。

(22)
矩阵Aψ的特征值λ求取如式(23)所示:
(-α-λ)2+β2=0。
(23)
则特征值λ也即磁链误差的闭环特征根为
λ1,2=-α±jβ。
(24)
为满足磁链观测的收敛性,必须满足
α>0。
(25)
所以在设计矩阵L时,要选择合适的参数,满足式(25),使得观测器的磁链收敛。
由式(15),可知

(26)

(27)
因为式(15)中的约束条件为γ>0,故满足α>0。此时磁链误差系统有两个相同的负实根λ1,2,为

当有两个相异的负实部共轭虚根时,磁链误差趋近于零的过程中呈衰减振荡的形式,响应速度比有两个相同的负实根时快,为此,重新定义矩阵L为式(28),且仍满足李雅普诺夫函数的要求即pV1<0。

(28)
此时,

故特征值如下:

上式满足α>0,即保证了磁链误差系统的特征根分布在左半平面,说明磁链具有收敛性。
保证磁链的收敛性,就是令磁链误差系统的闭环特征根即矩阵的特征根分布在系统的左半平面,且越远收敛速度越快,但同时也会使抗高频干扰能力下降。在参数选取时,要在两者之中折中处理。
在这里,需要确定6个参数,分别是q,γ,kp,ki,k1,k2。其中,q,γ的选取决定磁链估算的性能,而式(19)中的kp,ki决定转速估算的性能,式(5)中的k1,k2决定电流估算的性能。文中4.1节给出了具体的参数选取和仿真结果。
图1即异步电机的自适应滑模观测器的原理框图。

图1 异步电机的自适应滑模观测器Fig.1 Adaptive sliding mode observer of induction motor
观测器输入量为定子电压和实际定子电流,在电机静止坐标系下的状态方程基础上,利用估算定子电流和实际定子电流的误差作为滑模面,构成状态估算方程,实现对电机转子磁链的估算。电机转速则由自适应理论的李雅普诺夫函数得到。整个电机矢量控制系统框图如图2所示。

图2 异步电机无速度传感器矢量控制系统框图Fig.2 Diagram of sensorless vector control of induction motor
4 仿真结果
为验证本文的自适应滑模观测器的性能,在Matlab/SIMULINK环境中建立了系统仿真模型。异步电机参数如表1所示。

表1 电机参数表Table 1 Parameters of induction motor
4.1 磁链收敛性仿真
为说明磁链具有收敛性,本节选取了三组参数q=0.1,γ=0.0001ε;q=0.2,γ=0.0001ε;q=0.2,γ=0.001ε进行仿真。图3为磁链误差系统的闭环特征根分布图,图(b)是图(a)的局部放大图。由图3看出,特征根分布在左半平面,说明磁链误差具有收敛性。
在4.2节和4.3节的仿真中,具体的参数选取为:q=0.2,γ=0.0001ε,kp=0.4,ki=30,k1=-100,k2=-100。
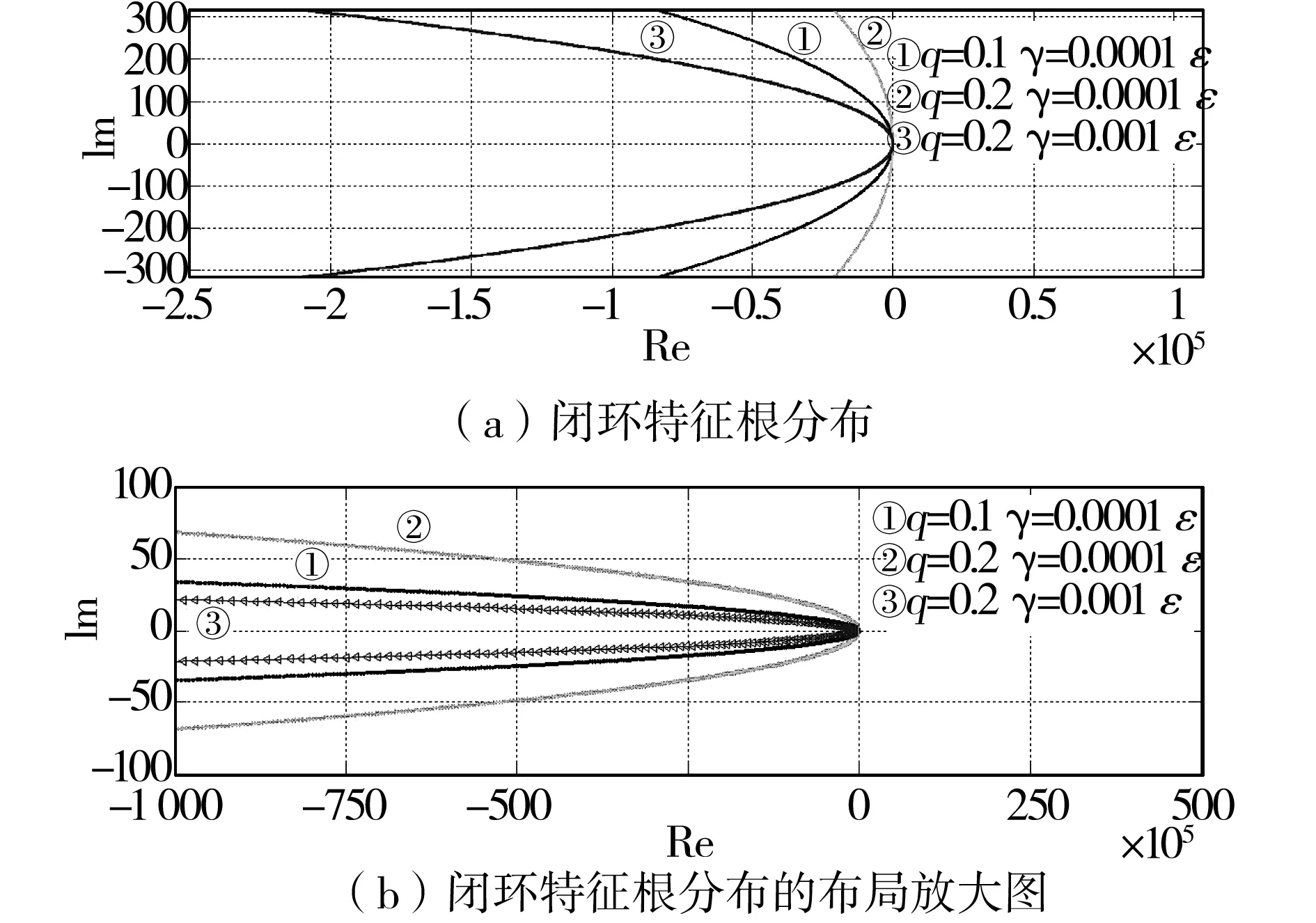
图3 磁链误差系统的闭环特征根分布Fig.3 Eigenvalues distribution of the flux error system
4.2 动态仿真结果
在t=0 s时空载启动,给定转速为1 200 r/min,仿真时间为0.8 s。文中分别给出了给定转速突变和突增负载两种情况下的动态仿真波形。
4.2.1 给定转速突变
在t=0.5 s时转速突减为600 r/min,定子电流,转子磁链,转子磁链角,转速的仿真波形如图4所示。转子磁链,转子磁链角,转速三者的估算误差的仿真波形如图5所示。
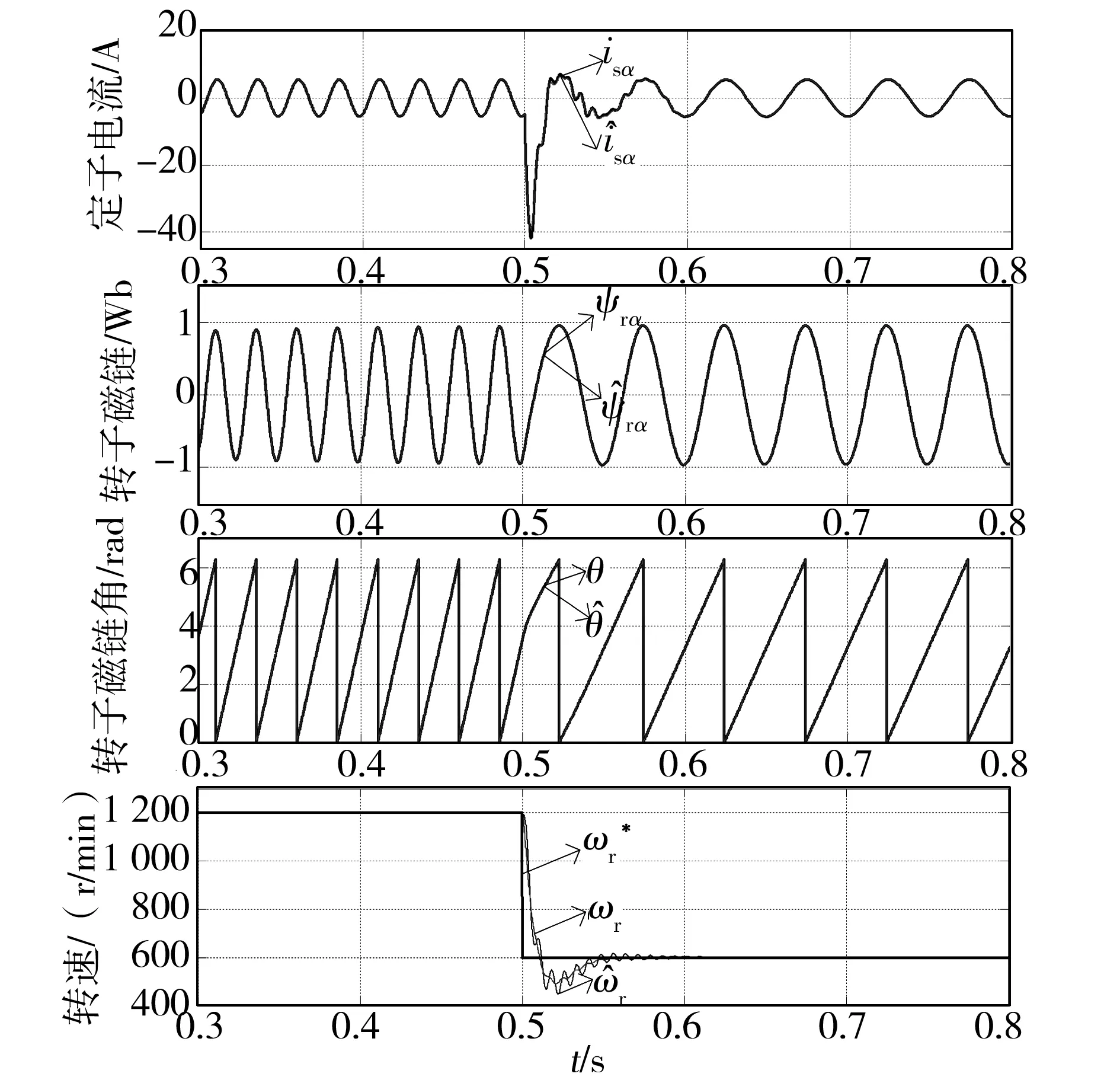
图4 给定转速突变时的定子电流,转子磁链,转子磁链角和转速波形Fig.4 Waveforms of stator current, rotor flux,rotor flux angle and speed when the given speed is changed

图5 给定转速突变时的转子磁链,转子磁链角和转速的估算误差Fig.5 Error of rotor flux,rotor flux angle and speed when the given speed is changed
从图4可以看出,定子电流,转子磁链,转子磁链角,转速的跟踪效果很好,估算值基本和实际值重合。图5中转子磁链,转子磁链角,转速的估算误差分别为2.0%、0.4%、1.7%,均在可接受的误差范围内。
4.2.2 突增负载
在t=0.5 s时,负载由空载突增为额定负载25 N·m,定子电流,转子磁链,转子磁链角,转速的仿真波形如图6所示。转子磁链,转子磁链角,转速三者的估算误差的仿真波形如图7所示。
从图6可以看出,定子电流,转子磁链,转子磁链角,转速的跟踪效果同样很好,估算值基本和实际值一样。转速在突增负载的动态过渡过程中略有偏差,但平稳之后跟踪状况良好。图7中转子磁链,转子磁链角,转速的估算误差分别为1.0%、0.1%、1.1%,均在可接受的误差范围内。
从上述两种情况的波形可以看出,电机在给定转速突变和加载运行的情况下,无论是在动态过程还是稳态过程,各个估测量可以实时跟随实际值,且估算误差很小,均在可接受的范围内。
4.3 参数鲁棒性仿真结果
基于4.2节的仿真测试,在t=0.8 s改变电机的定子电阻和转子电阻,仿真时间设置为1.1 s。观察滑模观测器对参数变化的鲁棒性的适应性。
图8(a)是Rs增加30%,Rr增加50%的转子磁链及其误差波形。图8(b)是Rs增加50%,Rr增加70%的转子磁链及其误差波形。图8(c)是Rs增加70%,Rr增加100%的转子磁链及其误差波形。图8三种情况下转子磁链的估算误差分别为0.12%,0.17%,0.20%。可以看出,定子和转子电阻的变化,对观测器的精度有一定影响,但影响几乎可以忽略,其估算误差对观测器的性能来说在可以接受的范围内,证明该观测器对参数变化具有较好的鲁棒性。

图6 突增负载时的定子电流,转子磁链,转子磁链角和转速波形Fig.6 Waveforms of stator current, rotor flux,rotor flux angle and speed when the load is added

图7 突增负载时转子磁链,转子磁链角和转速的估算误差Fig.7 Error of rotor flux,rotor flux angle and speedwhen the load is added

图8 改变Rs,Rr时转子磁链,转子磁链角和转速的估算误差Fig.8 Error of rotor flux,rotor flux angle and speed when Rs and Rr are changed
5 实验验证
为充分验证滑模观测器的性能,在定点型DSP芯片TMS320F2812实验平台上进行了空载和加减载实验。系统控制周期为250 μs。负载为与异步电机同轴连接的直流发电机。在加减载试验中,通过调节直流发电机的励磁电流,改变步电机的负载大小。异步电机安装有测速编码器,以得到电机真实转速,便于与估测转速进行对比。定子电流由霍尔传感器测量得到,并在示波器上显示,作为负载参考和相位参考。实验中采用的电机参数如表1所示。
空载试验中,给定转速为750 r/min,空载电流为3.08 A。图9为空载时滑模观测器的定子电流,转子磁链,转子磁链角和转速的波形。其中,iA为霍尔传感器测得的定子A相电流。

图9 空载时定子电流,转子磁链和磁链角和转速波形Fig.9 Waveforms of stator current,rotor flux,rotor flux angle and speed under no-load
为验证滑模观测器磁链观测的正确性,图10给出了滑模观测器与全阶观测器[14](full-order observer, FO)在空载时的估算转子磁链和转子磁链角的对比图。

图10 两种磁链观测器结果对比Fig.10 Waveforms of actual and estimated rotor flux and rotor flux angle with SMO and FO under no-load
图11为给定转速突变的实验波形。图12为突增突减负载时的估算转速和实际转速波形。图9给出了给定转速为750 r/min时的定子电流,转子磁链,转子磁链角和转速四个量的估算波形(以A相电流作为参考基准)。可以看出,相位和幅值跟踪良好。图10(a)给出了转速为750 r/min时的滑模观测器和全阶观测器的估算转子磁链,图10(b)则给出了两种观测器的估算转子磁链角波形。从波形图10可以看出,两种观测器的估算值基本相同,从而证明了该滑模观测器观测磁链的正确性。图11为给定转速由750 r/min突减到150 r/min,后又突增到750 r/min的实验波形。估测转速与实际转速的波形对比表明,转速的动态性能很好,估算转速能够快速准确地跟踪实际转速。加减载实验中定子电流和估测转速的波形如图12所示,转速为750 r/min,负载电流由空载3.08 A增加到5.5 A后又减载为3.08 A。转速在动态过程中略有超调后又很快恢复到750 r/min。实验结果验证了该自适应观测器转速观测的鲁棒性。

图11 给定转速突变时的实际转速和估算转速波形Fig.11 Waveforms of actual speed and estimated speed when the given speed is changed

图12 突增突减负载时的估算转速波形Fig.12 Waveform of estimated speed when the load is changed
5 结 论
本文研究了一种估算异步电机的转子磁链和转速的自适应滑模观测器。该观测器在电机静止坐标系下的状态方程的数学模型上,利用估算电流和实际电流的误差构造滑模面,建立了状态估算方程,从而估算出电机转子磁链。电机转速通过自适应理论估算。整个观测器的稳定性由李雅普诺夫稳定性理论保证。该观测器的方案实现简单,对参数变化的鲁棒性较好。研究表明,该观测器可以实现对磁链和转速的观测,并对参数的变化具有较好的鲁棒性。仿真结果和实验波形验证了该方案的有效性和可行性。
[1] Tursini M, Petrella R, Parasiliti F.Adaptive sliding-mode observer for speed-sensorless control of induction motors[J].IEEE Transactions on Industry Applications, 2000, 36(5):1380-1387.
[2] 陈伯时.电力拖动自动控制系统[M].第3版.北京:机械出版社,2008.
[3] 张永昌,张虎,李正熙.异步电机无速度传感器高性能控制技术[M].北京:机械工业出版社,2015.
[4] 张永昌,赵争鸣,张颖超,等.基于全阶观测器的三电平逆变器异步电机无速度传感器矢量控制系统[J].电工技术学报,2008, 23(11):34-40. ZHANG Yongchang, ZHAO Zhengming, ZHANG Yingchao, et al.Sensorless vector control system of induction motor fed by three-level inverter using a full order observer[J].Transactions of China Electrotechnical Society, 2008, 23(11):34-40.
[5] 尹忠刚,赵昌,钟彦儒,等.采用抗差扩展卡尔曼滤波器的感应电机转速估计方法[J].中国电机工程学报, 2012(18):152-159. YIN Zhonggang,ZHAO Chang,ZHONG Yanru, et al.A speed estimation method of induction motors using the robust extended kalman filter[J].Proceedings of the CSEE, 2012(18):152-159.
[6] ZHANG Y,ZHAO Z,LU T,et al.A comparative study of Luenberger observer, sliding mode observer and extended Kalman filter for sensorless vector control of induction motor drives[C]//Energy Conversion Congress and Exposition,IEEE,2009:2466-2473.
[7] 廖永衡,冯晓云,王珍.基于定子磁链滑模观测器的异步电机空间矢量调制直接转矩控制[J].中国电机工程学报, 2012(18):88-97. LIAO Yongheng, FENG Xiaoyun, WANG Zhen.Induction motor direct torque control based on stator flux sliding mode observer and space vector pulse width modulation[J].Proceedings of the CSEE, 2012(18):88-97.
[8] Sangwongwanich S, Doki S, Yonemoto T, et al.Adaptive sliding observers for direct field-oriented control of induction motor[C]// Industrial Electronics Society, 1990.Proceedings of the 16th Annual Conference on.IEEE,1990:915-920 vol.2.
[9] 王高林,陈伟,杨荣峰,等.无速度传感器感应电机改进转子磁链观测器[J].电机与控制学报,2009,13(5):638-642. WANG Gaolin,CHEN Wei,YANG Rongfeng, et al.Improved rotor flux estimator for sensorless induction motor[J].Electric Machines and Control, 2009,13(5):638-642.
[10] 路强,沈传文,季晓隆,等.一种用于感应电机控制的新型滑模速度观测器研究[J].中国电机工程学报, 2006, 26(18):164-168. LU Qiang,SHEN Chuanwen,JI Xiaolong, et al.A novel sliding-mode observer for speed-sensorless induction motors[J].Proceedings of the CSEE, 2006, 26(18):164-168.
[11] ZHAO L,HUANG J,LIU H,et al.Second-order sliding-mode observer with online parameter identification for sensorless induction motor drives[J].IEEE Transactions on Industrial Electronics, 2014, 61(10):5280-5289.
[12] 赵德宗,张承进,郝兰英.一种无速度传感器感应电机鲁棒滑模控制策略[J].中国电机工程学报,2006,26(22):122-127. ZHAO Dezong,ZHANG Chengjin,HAO Lanying.A novel sliding-mode observer for speed-sensorless induction motors[J].Proceedings of the CSEE, 2006, 26(22):122-127.
[13] Vieira R P, Gastaldini C C, Azzolin R Z,et al.Discrete-time sliding mode speed observer for sensorless control of induction motor drives[J].Iet Electric Power Applications, 2012, 6(9): 681-688.
[14] 邹伯敏.自动控制理论[M].第3版.北京:机械工业出版社,2007.
[15] 宋文祥,周杰,尹赟.感应电机转速自适应全阶磁链观测器的离散化[J].上海大学学报(自然科学版), 2012,18(6):582-588. SONG Wenxiang,ZHOU Jie,YIN Yun.Discretization of speed adaptive full-order flux observer for induction motors[J].Journal of Shanghai University(Natural Science Edition),2012, 18(6):582-588.
(编辑:邱赫男)
Adaptive sliding mode observer based sensorless control system of induction motor
GAO Yan-xia, CHEN Jing, FAN Ying-peng, SONG Wen-xiang
(School of Mechatronics Engineering and Automation,Shanghai University,Shanghai 200072,China)
For the problem of poor robustness to parameter change of induction motor speed sensorless control, an adaptive sliding mode observer based sensorless vector control method is presented for induction motor in this paper.The rotor flux observer was constructed on the basis of the state equation in static coordinate system.The sliding mode surface of the observer was derived by the error of the estimated stator current and the actual stator current.With the sliding motion, the estimated values were reaching the actual values finally, thus realizing the estimation of the motor rotor flux.The motor speed was obtained by adaptive theory.The Lyapunov stability theory guarantees the stability of the presented observer.Compared with other methods, adaptive sliding mode observer in this paper is superior in implementation easily and better robustness to the motor parameters deviations.The method has been simulated and implemented using the TMS320F2812 fixed-point DSP controller.Simulation and experiment results verify its feasibility and effectiveness, and under the condition of the load disturbance and the given speed change the sliding mode observer has certain robustness.
induction motor; adaptive sliding mode observer ; speed sensorless ;vector control; robustness
2016-05-04
国家自然科学基金(51377102);国家重大科学仪器设备开发专项资助项目(2012YQ15008703)
高艳霞(1958—),女,副教授,研究方向为电机驱动控制及应用、电力电子变换; 陈 静(1991—),女,硕士研究生,研究方向为异步电机的无速度传感器控制; 范应鹏(1991—),男,硕士研究生,研究方向为异步电机的无速度传感器控制; 宋文祥(1973—),男,教授,博士生导师,研究方向为电机驱动控制及应用、电力电子变换。
高艳霞
10.15938/j.emc.2017.04.002
TM 343
A
1007-449X(2017)04-0008-09