永磁电机无位置传感器控制死区补偿策略
2017-05-18杨阳王庆年龚依民刘春苹
杨阳, 王庆年 , 龚依民, 刘春苹
(1.吉林大学 汽车工程学院,吉林 长春 130021;2.吉林大学 物理学院,吉林 长春 130012)
永磁电机无位置传感器控制死区补偿策略
杨阳1, 王庆年1, 龚依民2, 刘春苹2
(1.吉林大学 汽车工程学院,吉林 长春 130021;2.吉林大学 物理学院,吉林 长春 130012)

空间矢量脉宽调制;死区效应;死区补偿;反电动势观测器;迭代控制
0 引 言
在电力电子控制发展的进程中,空间矢量脉宽调制(space vector pulse width modulation,SVPWM)技术因其结构简单,输出波形可控等优势被越来越广泛的应用在逆变器控制中。死区时间的加入保证了逆变器控制的安全性,但也造成了电压电流波形畸变,产生转矩转速脉动等死区效应[1-2]。因此探究死区补偿十分必要也广受关注。
对于死区效应有软件和硬件两类补偿方案,软件补偿只通过算法不增加系统硬件结构和成本移植性好等优点被广泛探究。大多数软件补偿都基于电流极性判断,再进行相应的时间或电压补偿。文献[3]把相电流极性判断转化为空间转子角区间判断,查表实现空间六个扇区分别对同步旋转坐标系下两相电压补偿。是比较经典的一种补偿算法,但其实质仍是电流极性判断,考虑到零电流钳位效应,对扇区判断的准确性很困难保证;文献[4]构造低通滤波器,对电流进行重构,得到实际相电流和相角。提高了对电流极性判断的准确性,能很好地改善电流钳位造成的误差,不过这种方法不仅移植性较差低通滤波器的参数也很难确定。考虑到电流极性判断的难点,提出一些新颖的补偿方法:文献[5]通过线性补偿,取相电流在零点附近ΔT范围内d-q轴电压,在2ΔT内进行线性补偿。补偿方法简单且易于实现,但对于扰动或突变,其跟随性和适应性都不够理想;文献[6]应用脉冲技术,分析死区效应对脉冲的影响,提出相应的补偿方案,理论依据充分,但大量的计算转化使其很难应用到实际控制中;文献[7]利用扰动观测器得到死区效应对应的扰动电压,进行对应的时间补偿,如何构造合适的扰动观测器以适应不同电机、不同工况是其难点。综上,零电流钳位效应和硬件采集时零点附近扰动,增加了电流极性判断的难度。一些补偿方法存在设计复杂、抗干扰性实用性差的问题,本文旨在设计一种无需检测电流极性,基于迭代控制算法,结构简单实用性强的死区补偿方法。

1 死区效应和电流钳位效应分析
三相逆变器结构框图如图1所示,空间矢量脉宽调制(SVPWM)是按一定的规则对脉冲进行调制,来控制逆变器的开关管状态。这些幅值相等的脉冲最终可实现等效控制。实际应用中开关管存在导通、关断延迟及抖动等干扰,为了防止逆变器同相上下臂短路,在触发脉冲中加入死区延时,但也由此导致了新的问题即死区效应。

图1 电机三相逆变器结构图Fig.1 Three-phase motor inverter diagram
设逆变器中电流流向电机为正方向(iu>0),以A相逆变器电路(图2(a))对死区效应原理分析:脉冲控制的开关类型和输出电压如图2(b)所示,图2(b)①描述的是理想状态下控制的脉冲,此时不存在导通关断延时,上下臂开关管可瞬间切换。实际控制中开关管导通关断都是非理想的,为了保证安全在每臂开关管的导通脉冲前加一段死区延时,图2(b)②反映的是加入死区后的控制脉冲,因导通时间受电流方向不同影响,可分析A相导通时间为
(1)
导致输出电压也产生相应变化。图2(b)③反映的是A相理想状态下的输出电压。图2(b)④和图2(b)⑤反映了A相考虑死区效应后的输出电压:
(2)
死区效应产生的误差使实际输出电压不等于期望电压,这是导致电流波形畸变电机性能变差的根本原因。
由图2(c)分析可知,在死区时间内上下两臂开关管都处于关断状态,开关管失去控制性能,这将阻碍电流朝反方向变化而钳位在零点附近。特别是当电机低转时输出电压较低,这种现象可能持续几个采样周期,产生明显的零电流钳位效应[8],这增加了电流极性判断的难度,甚至引发错误补偿,使零点附近电流波形畸变更加严重。

图2 死区效应和零电流钳位分析Fig.2 Dead time effect and zero current clamping effect
电机在实际运行中存在反电动势,考虑到死区效应和零电流钳位效应,则永磁同步电机d-q轴电压方程为
(3)

2 基于迭代控制的死区补偿
2.1 死区效应造成的电压误差分析
交流电机中电磁关系复杂,励磁电流与转矩电流相互耦合,本文采取磁场定向矢量控制(FOC)的方法,使转矩电流和励磁电流解耦实现独立控制。由矢量控制图3可知d-q轴电流PI控制器输出ud与uq即为期望电压。
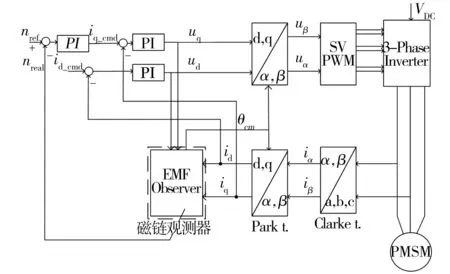
图3 无位置观测器矢量控制框图Fig.3 Vector control block diagram

(4)

图4 永磁同步电机旋转坐标系Fig.4 Permanent magnet synchronous motor rotating coordinate system


(5)

(6)
因为采样时间极短,相邻采样周期电机转速可视为不变,由公式(6)可知反电动势的一阶微分为零。
转子d-q坐标系下设计全阶状态观测器,取系统状态方程和输出方程分别为:
(7)
其中A、B、C参数矩阵可由方程(4)确定。

(8)
(9)
2.2 基于迭代控制死区补偿
由无位置控制器矢量控制图可知,在转子旋转坐标系下,反电动势的期望值应为
(10)

图5 补偿框图Fig.5 General compensation diagram
由上述的死区效应和零电流钳位的分析可知Δud_dead、Δuq_dead是周期性的(如图6)。

图6 仿真d-q轴电压误差值Fig.6 Voltage errors result from dead-time effect in d-q reference frame
(11)
应用闭环PID迭代学习控制策略对电压误差进行PI控制:
应用Matlab仿真模块把迭代补偿整合到矢量控制图中(如图7)。

图7 带迭代补偿的无位置矢量控制框图Fig.7 Vector control block diagram with dead-time compensation
本文创新使用迭代控制算法,多次的迭代使目标轨迹无限趋近期望轨迹,对于观测器自身误差和突变误差都能很快的自适应,实现理想跟随。本文接下来将通过仿真和实验证实这种迭代死区补偿方法的有效性和实用性。
3 仿真与实验
3.1 仿真研究
通过Matlab/SIMULINK搭建控制和仿真模型(设定采样频率8 kHz),图8是未加入死区时间理想的三相电流波形和转速波形仿真图,图9和图10分别是加入死区时间5 μs和10 μs时的三相电流波形和转速波形仿真图。

图8 三相电流和转速仿真图(Tdead=0)Fig.8 Simulation of three-phase current and speed with no dead-time

图9 三相电流和转速仿真(Tdead=5 μs)Fig.9 Simulation of three-phase current and speed with 5 μs dead-time
仿真结果表明随着死区时间的增加,零电流钳位效应和电流波形畸变现象越来越严重,电机转速的波动也越来越明显。在控制模型中加入迭代补偿模块后再进行仿真,图11为(Tdead=5μs时)加入补偿前后电流波形的对比,可知电流波形畸变和零电流钳位效应有所改善。
3.2 实验研究
测试台架如图12所示,空调风机电机基于英飞凌公司的XMC4500平台,功率控制采用IPM(FNA41560B2)模块,载频8kHz,死区时间为3μs。电流波形由AgilentDSO6034示波器和FLUKSi400s电流探头测得,测量精度为1mV/A。
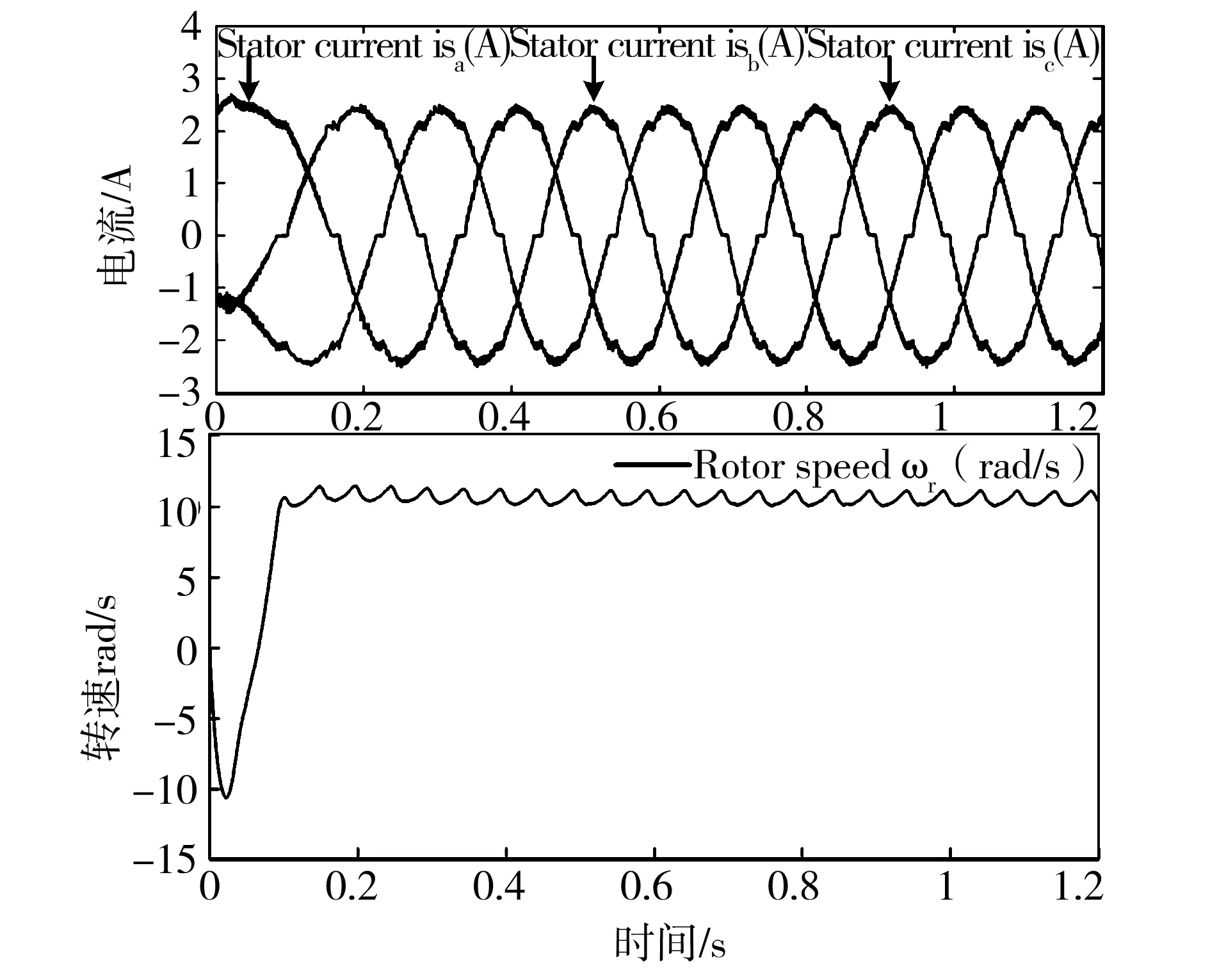
图10 三相电流和转速仿真(Tdead=10 μs)Fig.10 Simulation of three-phase current and speed with 10 μs dead-time
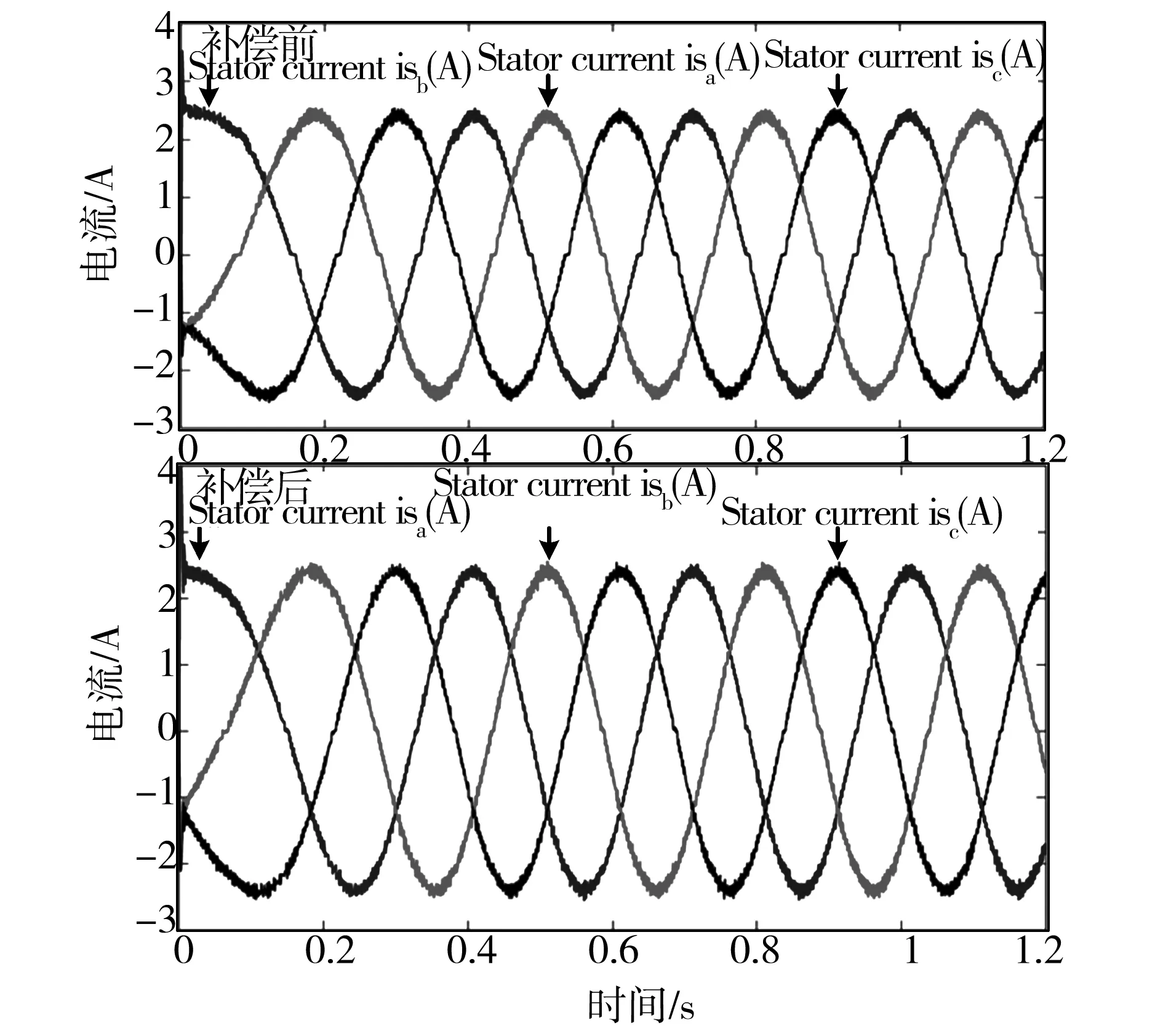
图11 补偿前后三相电流仿真图Fig.11 Simulation of the three phase current before and after compensation
实际实验中无位置传感器永磁同步电机在额定功率下运行,PMSM参数为:额定功率P=1 kW,极对数P=4,额定电压380 V,定子电阻R=3.2 Ω。图13、图14分别是补偿前后的电流波形和进行快速傅里叶变换后的谐波频谱。

图12 永磁同步电机硬件实验平台Fig.12 Hardware experimental platform of permanent magnet synchronous motor

图13 补偿前实验电流波形和频谱(Tdead=3 μs)Fig.13 Experimental current waveform and spectrum before compensation
比较图补偿前后发现:没有进行死区补偿前,电流波形正弦度较差,畸变较严重存在明显的零电流钳位现象;使用本文提出的迭代死区补偿方法后电流波形正弦度明显改善,零电流钳位现象得到了有效抑制;在额定功率下,三相电流的谐波值都有所减少,特别是对影响较大的5、7次谐波有明显的减少,5次谐波电流幅值分别从原来的50.8 mA 减为23.4 mA,7次谐波电流幅值分别从原来的47.1 mA减为9.6 mA,电流总谐波畸变率从 9.729%降为 4.293%;有效削弱了谐波影响,电流波形得到了一定的改善,抑制了零电流钳位效应,实验对比可知,本文提出的死区补偿策略具有较好的性能。同时降低电机低速时的转速转矩脉动。

图14 补偿后的实验电流波形(Tdead=3 μs)Fig.14 Experimental current waveform and spectrum after compensation
4 结 论
本文针对逆变器死区效应和零电流钳位效应提出一种新颖的迭代控制死区效应补偿方法,无需电流极性检测,避免了传统补偿策略中电流极性检测不准,补偿效果不理想的问题。矢量控制输出电压期望值,创新设计观测器模型来输出电压实际值,为保证快速适应和抗干扰能力,提出误差迭代补偿的方法,最后仿真和实验都验证了这种补偿策略能够有效地抑制零电流钳位效应,降低低频电流谐波,改善电流波形正弦度,是一种新颖有效的电流补偿方法。
[1] RODRIGUEZ J, BERNET S, WU B, et al.Multilevel voltage-source-converter topologies for industrial medium-voltage drives [J].IEEE Transactions on Industrial Electronics, 2007, 54(6): 2930-2945.
[2] YOSHIHIRO Mura, TOMOFUMI Watanabe, HARUMTTU Iwasaki.Waveform distortion and correction circuit for PWM inverters with switching lag-times [J].IEEE Transactions on Industry Application, 1987,IA-23(5): 881-886.
[3] HUANG Q, NIU W.Analysis on dead-time compensation method for direct drive PMSM servo system [J].International Conference on Electrical Machines and Systems, 2013: 1271-1276.
[4] MUNOZ AR, LIPO TA.On lined dead-time compensation technique for open loop PWM VSI drives [J].IEEE Transactions on Power Electronics, 1999, 14(4): 683-689.
[5] 潘海鸿, 陈斌, 陈琳,等.考虑零电流嵌位的永磁同步电机死区效应补偿方法[J].电机与控制应用,2010,37(10):1-5. PAN Haihong,CHEN Bin, CHEN Lin, et al.Dead-time compensation strategy for permanent magnet synchronous motor drive taking zero current clamp into account [J].Electric Machines and Control Appliation,2010,37(10):1-5.
[6] LEGGATE D, KERKMAN RJ.Pulse-based dead-time compensator for PWM voltage inverters [J].IEEE Transactions on Industrial Electronics,1997,44(2):191-197.
[7] 周华伟, 温旭辉,赵峰, 等.一种新颖的电压源逆变器自适应死区补偿策略[J].中国电机工程学报,2011,31(24):26-32. ZHOU Huawei, WEN Xuhui, ZHAO Feng, et al.A novel adaptive dead-time compensation strategy for VSI[J].Proceedings of the CSEE,2011,31(24):26-32.
[8] Ueda R, Sonoda T, Takata S.Experimental results and their simplified analysis on instability problem in PWM inverter induction motor drives[J].Industry Applications IEEE Transactions on, 1989, 25(1): 86-95.
[9] 孙承波, 宋丹, 陈国呈, 等.基于锁相环空调直流压缩机矢量控制系统[J].电工技术学报.2009,24(4):78-84. SUN CB, SONG Dan, CHEN Guocheng,et al.Vector control for air-conditioner DC compressor based on PLL [J].Transactions of China Electro-technical Society.2009, 24(4): 78-84.
[10] ARIMOTO S, KAWAMURA S, et al.Learning control theory for dynamic systems [J].IEEE Conference on Decision and Control, 1985, 1375-1380.
(编辑:刘素菊)
Dead-time compensation strategy for sensorless control of permanent magnet synchronous motor
YANG Yang1, WANG Qing-nian1, GONG Yi-min2, LIU Chun-ping2
(1.College of Automotive Engineering,Jilin University,Changchun 130021,China;2.College of Physics,Jilin University,Changchun 130012,China)
space vector pulse width modulation; dead-time effect; dead-time compensation; EMF observer; iterative control
2016-02-19
国家自然科学基金(21327803)
杨 阳(1987—),男,博士研究生,研究方向为电机控制; 王庆年(1952—),男,教授,博士生导师,研究方向为混合动力汽车驱动理论与控制技术; 龚依民(1966—),男,教授,研究方向为新能源汽车发动机电控; 刘春苹(1989—),女,硕士研究生,研究方向为汽车电子与嵌入式系统。
龚依民
10.15938/j.emc.2017.04.001
TM 351
A
1007-449X(2017)04-0001-07