纯电动中型客车传动系参数的模型在环优化
2017-05-15许世维贺伊琳
许世维, 贺伊琳, 刘 伟, 赵 轩
(长安大学 汽车学院,陕西 西安 710064)
纯电动中型客车传动系参数的模型在环优化
许世维, 贺伊琳, 刘 伟, 赵 轩
(长安大学 汽车学院,陕西 西安 710064)
文章针对纯电动中型客车传动系参数优化问题,以传动系中变速器的传动比为优化变量,以车辆动力性和经济性为优化目标,采用模型在环优化(non-optimization with model in loop,OML)方法,利用Simscape物理建模工具建立电动客车模型,结合带精英策略的非支配排序遗传算法(non-dominated sorting genetic algorithm NSGA-Ⅱ)对纯电动客车传动系参数进行优化,并基于最小二乘法组合赋权法进行Pareto解集选优确定出最优解。优化结果表明,利用OML方法在约束条件范围内合理地优化了变速器的传动比,加速时间和比能耗分别降低了6%和3.9%,达到了整车动力性和经济性协同优化的目的,为实车开发提供了理论参考。
纯电动中型客车;传动系参数优化;模型在环优化(OML);Simscape物理建模工具
随着能源危机和环境危机的日益加重,电动汽车的发展受到了世界各国政府、企业及研究机构的重视,因为电动汽车传动系性能的优劣对汽车性能的影响较大,所以电动汽车传动系统参数匹配和优化也成为电动汽车研究的重要方向。文献[1]将强化遗传算法与模拟退火算法相结合,对插电式混合动力客车传动系参数和控制参数进行优化,使得车辆在城市工况下动力性能得到了较大的提升;文献[2]采用粒子群算法,在NEDC工况和FTP75工况下优化燃料电池汽车的传动系设计参数,减少了整车部件尺寸,降低了整车成本和燃料消耗;文献[3]采用遗传算法优化了并联混合动力汽车的控制策略,能够在ECE-EUDC、FTP 、TEH-CAR 3种工况下保证汽车最佳的动力性;文献[4]以动力性能指标为约束,以最小油耗和最佳排放性能为目标函数,采用自适应遗传算法,在ADVISOR平台上对一辆使用逻辑门限控制策略的并联混合动力汽车进行优化,使混合电力汽车的油耗和排放综合性能提高4%;文献[5]以某两挡变速器纯电动汽车为研究对象,以原地起步加速时间和续驶里程为目标函数,利用基于模拟退火的粒子群优化算法对车辆的经济性和动力性进行协同优化,得到了比普通fmincon方法更好的优化结果;文献[6]通过在行驶工况下建立以比能耗和动力因数为分目标的优化目标函数,以蓄电池、电机、传动系相关限制为约束,对纯电动汽车在长沙市市区行驶工况下性能进行优化,使得车辆动力因数提高、比能耗降低。以上研究均取得了较好的优化效果,但是这些优化方法大多侧重于简单的汽车动力性或经济性优化,而在两者性能协同优化与整车模型相结合的模型在环优化方面尚缺少深入研究,因此不利于汽车整体性能的优化与提升。另外,由于现阶段电动汽车的研究大部分集中在大型客车(10 t以上)和乘用车(2 t以下)领域,而对于运行在城市非主干道上的中型电动客车(4~6 t)研究较少,这些中型客车对于市民出行的便利、交通压力的缓解起着更为重要的作用;由于成本的限制,这类电动中型客车一般很少采用价格较为昂贵的大功率电机,故需要采用变速器来弥补动力源功率方面的不足。因此,本文通过研究某种19座、总重5.2 t的纯电动中型客车,综合考虑汽车的动力性与经济性,基于模型在环优化(optimization with model in loop,OML)理论,利用多目标遗传算法优化传动系参数,在约束范围内最大程度地提升车辆性能。
1 OML设计
OML是通过将待优化对象模型嵌入到优化算法中,在算法中重复调用模型来进行迭代计算,从而完成优化过程的一种方法[7]。采用OML能够在不改变系统原有结构的前提下对系统整体或部分进行优化,不需要重新设计系统的简化模型或者重新制定反映优化问题特征的方程,因而优化效果比较真实可靠,并能够提高优化效率,因此特别适合于多目标、多约束、复杂模型的优化[7]。
本文所研究的纯电动中型客车传动系参数优化采用OML的设计方法,具体流程如图1所示。

图1 模型在环优化(OML)流程
首先,根据整车技术参数,利用Matlab中的Simscape物理建模工具建立电动客车模型,将整车模型嵌入到优化算法的计算循环中,并确定优化变量。在初始时刻,整车模型在优化变量的初始值下进行计算,从而得到初始状态下的目标函数值。其次,将计算得到的目标函数值反馈到优化算法中,通过优化算法产生一组新的数值,将该新数值作为优化变量导入整车模型中进行计算,获得满足目标函数和约束条件的数值。再次,将计算结果反馈给优化算法,从而将重新生成的一组新值作为优化变量。最后,依次重复迭代下去,直到满足终止条件,最终所得到的一组解即为所求的最优解。
2 基于Simscape的纯电动客车模型构建
Simscape是由MathWorks公司推出的物理建模平台,主要包括SimDriveline、SimElectronics、SimHydraulics、SimMechanics、SimPowerSystems 5个重要子平台,该模型的建立是依据物理拓扑网络而非数学方程,利用其搭建的被控对象模型本身就是物理实体模型,适用于汽车、航空、国防和工业装备等领域中的应用。其中,SimDriveline包含了汽车车身、轮胎、离合器等许多模型,比较适合于汽车动力系统的建模。因此,相比于以往的汽车性能仿真,利用SimDriveline搭建的电动客车模型能够比较准确地反映汽车的物理实体特性,仿真结果更加真实。
2.1 原车结构参数
本文研究对象是某大学开发研制的试验用纯电动中型客车,其原车基本参数见表1所列,该试验车是在一辆传统中型客车的基础上改造而成的,采用后轮驱动,并保留了原车的传动系统[8-9]。但是改装后电机的动力特性与原车发动机的动力特性不同,原车的传动系统不能较好地与电机特性相匹配,因此需要优化传动系的参数,使其符合电机驱动特性要求,从而提升车辆的动力性与经济性。

表1 原车基本参数
2.2 基于Simscape的电动客车整车模型的建立
本文所研究的纯电动中型客车主要由蓄电池、电机、传动系、车身、轮胎和控制系统6个部分组成,如图2所示。

图2 基于SimDriveline的电动客车整车模型
其中,Control system模块为控制系统模型,该模块从Drive cycle 模块获取车辆行驶的需求车速,经过处理后将对应的控制信号分别传递给电机和变速器,从而实现车辆动力的控制与传递;动力经过主减速器后被传递到轮胎模块;车身模块主要进行车身动力学计算,在设定风速、道路坡度等值之后,车身模块根据轮胎传递的平移运动量进行解算,最终得出车辆行驶速度。其中,整车模型中的蓄电池模块、DC-DC转换模块和电机模块需要利用SimPowerSystems和SimElectronics构建,因此本文所建立的整车模型是一个多领域仿真模型。
2.3 变速器模型
采用SimDriveline建立的四速自动变速器模型如图3所示,该模型是参照原车固定轴线式齿轮变速器搭建而成,该模型由3个常啮合齿轮组、4个挡位离合组成,Gear Cmd接口与B接口分别接收来自控制系统模块中的挡位信号和电机传递的转矩,并经过换挡策略的逻辑判断各挡位离合器的结合或断开,从而实现挡位的变换。其中,四挡为直接挡,一、二、三挡的传动比由其对应的常啮合齿轮组的传动比决定,最终的输出动力经过F端口传递给主减速器。

图3 四速自动变速器模型
3 传动系参数多目标遗传算法的优化
纯电动中型客车传动系参数优化存在着多目标、多参数、多约束的特点,由于动力性和经济性存在着相互耦合关系,不能单一地优化动力性或经济性而忽略了另一个性能[10]。因此,本文优化目标是在约束条件范围内搜索出满足动力性目标函数f1(x)最小值和经济性目标函数f2(x)最小值的协同最优解,具体描述如下:
(1)
其中,Ω为可行域空间;F(x)为目标函数;tj≥0为约束条件;x为待优化参数;m为约束条件的个数。
3.1 优化变量
在电动客车传动系众多参数中,变速器和主减速器的传动比对整车的动力性和经济性影响最大,又因为主减速传动比一般作为标准配置来选用进行车辆设计[11],因此本文选择变速器的传动比作为传动系参数的优化变量,即
xi=[x1,x2,x3,x4]T=[ig1,ig2,ig3,ig4]T
(2)
其中,i=1,2,3,4。
3.2 优化目标
(1) 动力性目标。由于加速时间比最高车速和最大爬坡度更能客观、准确地反映汽车的综合动力性能,因此本文选择0~30 km/h加速时间作为衡量电动客车的动力性的分目标函数[10]。根据汽车理论知识可知,汽车从静止开始起步连续换挡加速至30 km/h所需的时间[12]为:

(3)
其中,T为0~30 km/h加速时间;a为某一时刻车辆的加速度;u为车速。
(2) 经济性目标。现阶段研究者们提出了许多表征电动汽车经济性的指标,但是大部分指标还不能全面准确地反映电动汽车经济性,因此,关于电动汽车经济性迄今为止还未形成统一的指标[6]。
本文通过分析比较几种常用的电动汽车经济性指标,最终选择比能耗作为经济性分目标函数的评价指标[11],由于比能耗能够反映出单位质量的车辆在行驶单位距离时所消耗的能量,避免了由于车型和行驶距离等因素对评价结果造成的不利影响,并选择能够真实反映中国城市道路工况的中国典型城市公交(China city bus operating cycle,CCBC)工况作为评价工况。其中,通过分析电动客车在驱动和制动状况下的能耗特征得出最终的比能耗为:

(4)
其中,ec为电动汽车的比能耗;E为电动汽车特定工况下消耗的能量;S为行驶里程;m为电动汽车的质量;E1为驱动时所消耗的能量;E2为制动时抵消制动能量回收之后所消耗的能量。
3.3 约束条件
电动客车动力系参数优化问题的约束条件[13]主要包括最高车速要求、最大爬坡度要求、续驶里程要求、防止动力传递中断要求等,约束条件具体如下:
(1) 最高车速要求:vmax≥80 km/h。
(2) 最大爬坡度传动比计算公式如下:

(5)
其中,g为重力加速度,此处取9.8 m/s2;Tmax为电机最大扭矩;α为汽车最大爬坡度,α≥20%。
(3) 55 km/h等速行驶续驶里程要求:Scon55≥100 km。
(4) 满足变速器传动比分配的约束条件。汽车在正常行驶过程中,变速器各挡位的利用率不同,一般情况下有利于提高经济性的高挡位利用率较高,并且高挡位之间的换挡也较为频繁。结合汽车理论中变速器挡位传动比分配原则,在相邻挡位传动比成等比关系的基础上,适当缩小相邻高挡位之间传动比的比例[10],由此得出约束条件为:
(6)
其中,q为相邻挡位之间的传动比之比。
(5) 满足防止动力传递中断的约束条件。在设计变速器时,应该考虑如何避免车辆换挡过程中可能会出现的动力中断的危险状况,以保证换挡过程平顺、安全。在换挡时,如果要防止出现动力中断,必须合理设计变速器的传动比,使车辆在当前所处挡位、电机以最大转速运行时所对应的最大车速,大于汽车在下一挡位、电机在最大扭矩点所对应的转速下运行时所对应的车速,从而保证汽车的功率能够连续传输[12],由此可得约束条件为:
(7)
其中,nm-t-max为电机在最大扭矩处所对应的转速;nmotor-max为电机最高转速。
3.4 NSGA-Ⅱ多目标遗传算法及其运行过程
NSGA-Ⅱ(non-dominated sorting genetic algorithmⅡ)是一种基于非支配排序遗传算法改进的多目标遗传算法,采用非优超排序机制进行快速非支配排序,加快了计算速度;引入了精英策略,保证优良个体不会丢失;采用拥挤度和拥挤度比较算子,保证了种群的多样性[14-15],因此,NSGA-Ⅱ在多目标优化问题的实际应用中取得了较好的效果。
本文采用NSGA-Ⅱ对电动客车传动系参数进行优化,所选用的遗传算法基本参数见表2所列,算法的具体流程如图4所示。
(1) 编码。采用实数编码法对传动系待优化参数进行编码。
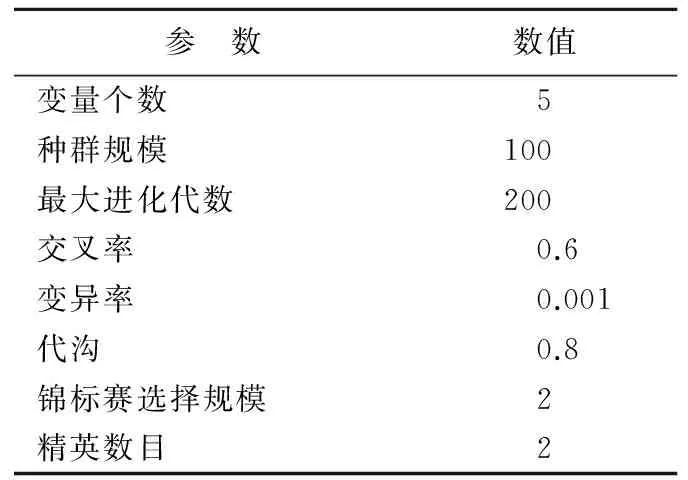
表2 遗传算法基本参数

图4 NSGA-Ⅱ多目标遗传算法流程
(2) 初始种群产生。
Gf=(X1,X2,…,Xi,…,Xn)T
(8)
其中,1≤i≤n;n为初始种群中个体数;Gf为父代种群。
(3) 基本遗传算法处理[16]。通过选择、交叉、变异,生成子代种群Gc,并将子代与父代合并生产新的种群G0,其中G0的规模为2n。
(4) 基于Simscape整车模型的种群个体适应度计算。通过将步骤(3)中产生的父代与子代合并的新种群G0代入Simscape整车模型中,计算动力性目标和经济性目标的适应度。
(5) 序值计算。结合步骤(4)计算得到的适应度,根据个体之间的支配与非支配关系进行序值计算,并保存计算结果用于后续排序。
(6) 快速非支配排序。根据步骤(5)得到的种群中个体序值计算结果,通过非优超排序机制将种群中的个体分配到不同的前端[17]。
(7) 拥挤距离计算与评估。对处于同一前端中的个体进行拥挤距离计算,以评价种群的多样性。
(8) 种群修剪。根据拥挤距离,利用锦标赛法将种群中适应度较差的个体裁剪掉,将种群规模从2n缩减到n,得到与规定规模一致的种群。
(9) 终止判定。将算法进行终止条件判断,如果满足终止条件,或已经进化到规定的代数,则终止算法,输出Pareto解;否则代数加1,返回步骤(3)。
经过以上步骤,最终得出满足约束条件的非劣最优解(Pareto解)。
3.5 基于最小二乘组合赋权法的 Pareto 选优
得到Pareto解集之后,需要从中搜索出最符合纯电动中型客车实际性能需求的组合最优解。由于解集中方案较多,且理论上得到的每个Pareto最优解都满足要求,故首先需要利用权重系数变化法将多目标问题进行转换,之后利用层次分析法赋予主观权重系数,再根据评价指标在不同被评价对象中的差异,采用变异系数法得到反映指标客观特性的权重系数,最后基于最小二乘法求得综合反映主、客观的权重系数[18]。
(1) 利用权重系数变化法将多目标问题进行转换。在分别赋予动力性和经济性目标函数以权重系数之后,为了消除分目标函数单位和量级对优化结果的影响,需要将所求得的f1(xi)和f2(xi)进行标准化处理,即

(9)
其中,w1、w2分别为动力性目标和经济性目标的权重系数;f1max(xi)、f1min(xi)分别为动力性目标函数的最大值和最小值;f2max(xi)、f2min(xi)分别为经济性目标函数的最大值和最小值。
(2) 利用层次分析法确定各指标的主观权重U=(u1,u2,…,um)T。
(3) 利用变异系数法确定客观权重V=(v1,v2,…,vm)T。
(4) 各项指标组合权重W′=(w1,w2,…,wm)T。
(5) 对具有n个方案m个评价指标的方案集进行标准化处理,得到决策矩阵Z=(zij)n×m,则第i个评价对象的评价值为:
(10)
对各评价指标而言,主、客观赋权下的评价值越接近,其评价结果越好,故采用最小二乘法得到的优化组合模型如下:
(11)
(6) 将模型中目标函数进行拉格朗日算子变换,再分别对wj、λ(λ为拉格朗日算子)求偏导,计算出每个方案的综合评价值,再基于灰色关联分析法,定义出纯电动中型客车标准综合性能指标,通过计算被评估性能与标准综合性能的关联度,纯电动中型客车性能综合评价值等级划分规则如图5所示,由图5确定出各评价对象的评价值等级。

图5 纯电动中型客车性能综合评价值等级划分
根据上述步骤得出纯电动中型客车性能的综合评价值等级,其中综合评价等级最高的解即为最优方案。最终得到优化后的综合权重为:
(12)
其中

e=[1,1,…,1]T;
最终得到经过最小二乘法组合赋权优选的权重系数为:
W=(w1,w2)T=(0.405, 0.595)T。
4 优化结果及分析
优化过程中种群个体拥挤距离如图6所示,通过对比图6中不同个体的拥挤距离可知,优化后种群内某些个体拥挤距离较大(超过点划线的个体),其与相邻个体的目标函数值差别大,尤其是实线椭圆圈标注出的个体拥挤距离更高,这些个体多样性更好,在最后种群修剪过程中不易被裁掉[17];虚线椭圆标注的个体由于拥挤距离为0,多样性差,故在进化过程中被淘汰。

图6 优化过程中种群个体拥挤距离
第一前端Pareto非劣最优解分布如图7所示。由图7可知,当迭代停止时,第一前端Pareto非劣最优解分布均匀,有28个Pareto最优解被选中,理论上这些解都可以作为目标函数的最优解,但是为了确定一组最能符合设计需要的最优解,需要利用组合赋权进行Pareto优选。第一前端Pareto非劣最优解所对应的综合评价等级如图8所示。图8结合图5可知,Pareto非劣最优解中的第14个解所对应的综合评价等级最高(为7级),因此该组解所对应的车辆的性能是最优的,该组最优解为X=[5.352, 2.605, 1.587, 1],此时对应的动力性和经济性目标函数值分别为12.6 s和0.041 9 kW·h/(km·t)。

图7 第一前端Pareto非劣最优解分布

图8 第一前端Pareto非劣最优解所对应的综合评价等级
传动系参数优化前后对比结果见表3所列,由表3可知,除直接挡外,优化后变速器各挡传动比有所下降,原因是本文所研究的纯电动客车属于商用车,更侧重于经济性要求,故3.5节中进行Pareto优选时经济性的权重系数明显大于动力性,而变速器传动比的降低有利于经济性的提高,因此最终得到的优化结果是在动力性的可承受约束范围内尽量地偏向了提升整车的经济性。电动客车动力性优化结果对比见表4所列,0~30 km/h加速工况速度-时间曲线如图9所示。

表3 传动系参数优化前后对比

表4 电动客车动力性优化结果对比
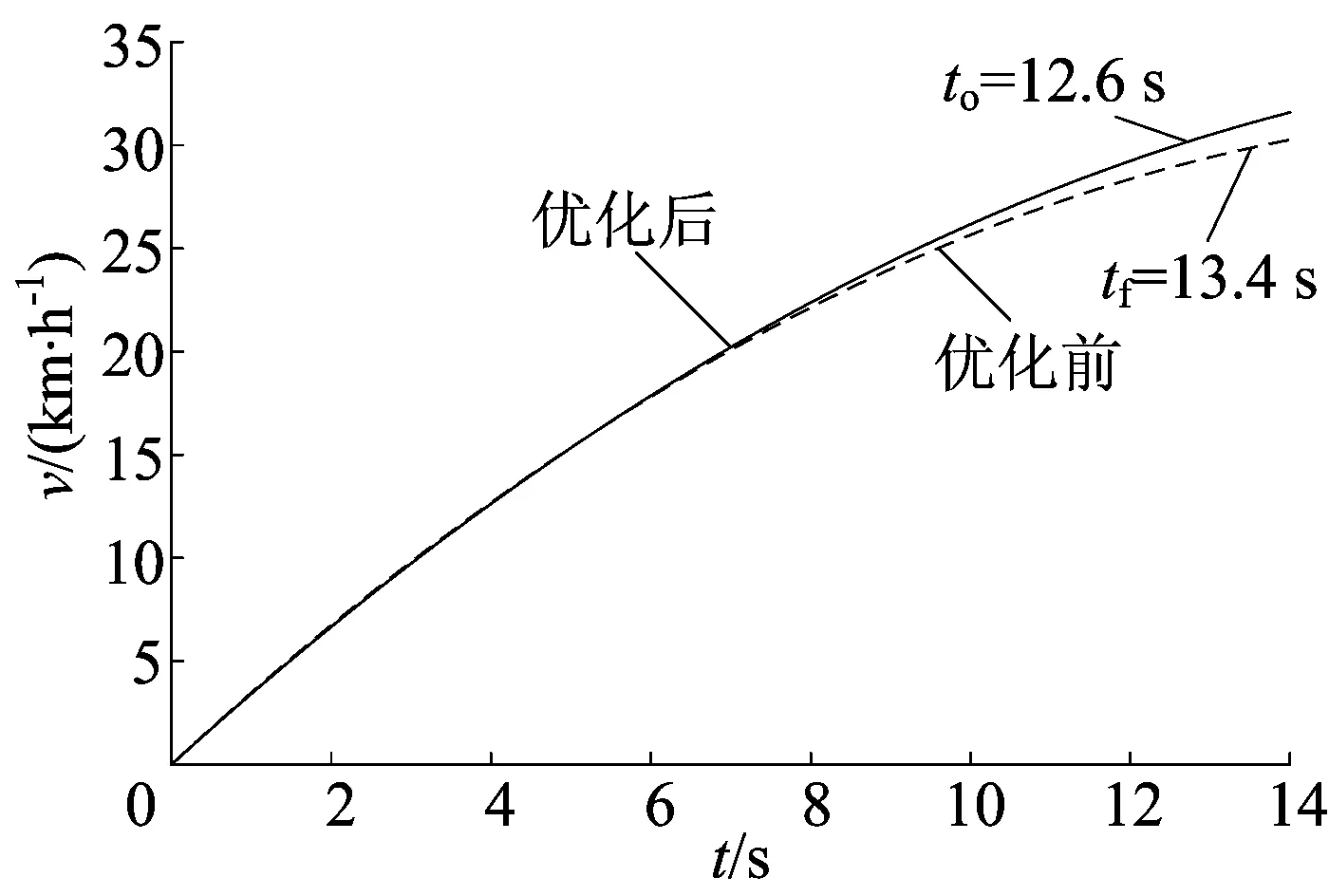
图9 0~30 km/h加速工况速度-时间曲线
由表4、图9可知,优化后0~30 km/h加速时间由原来的13.4 s降低到12.6 s,提高了6.0%;优化后的最高车速由82 km/h提高到82.3 km/h,略微增加0.37%;而最大爬坡度则由22.6%降到21.7%,降幅为4%,但是由于本文研究电动客车属于商用车,其动力系统参数优化更侧重于经济性的提升,优化过程中不可能使所有指标都得到提升,而在满足动力性约束条件要求前提下牺牲一部分动力性是可以接受的,因此优化后最大爬坡度虽有所下降,但亦能满足最大爬坡度大于20%的要求,故优化结果可以接受。CCBC工况下速度-时间曲线如图10所示,CCBC工况优化前后电能消耗量对比结果如图11所示。

图10 CCBC工况下速度-时间曲线
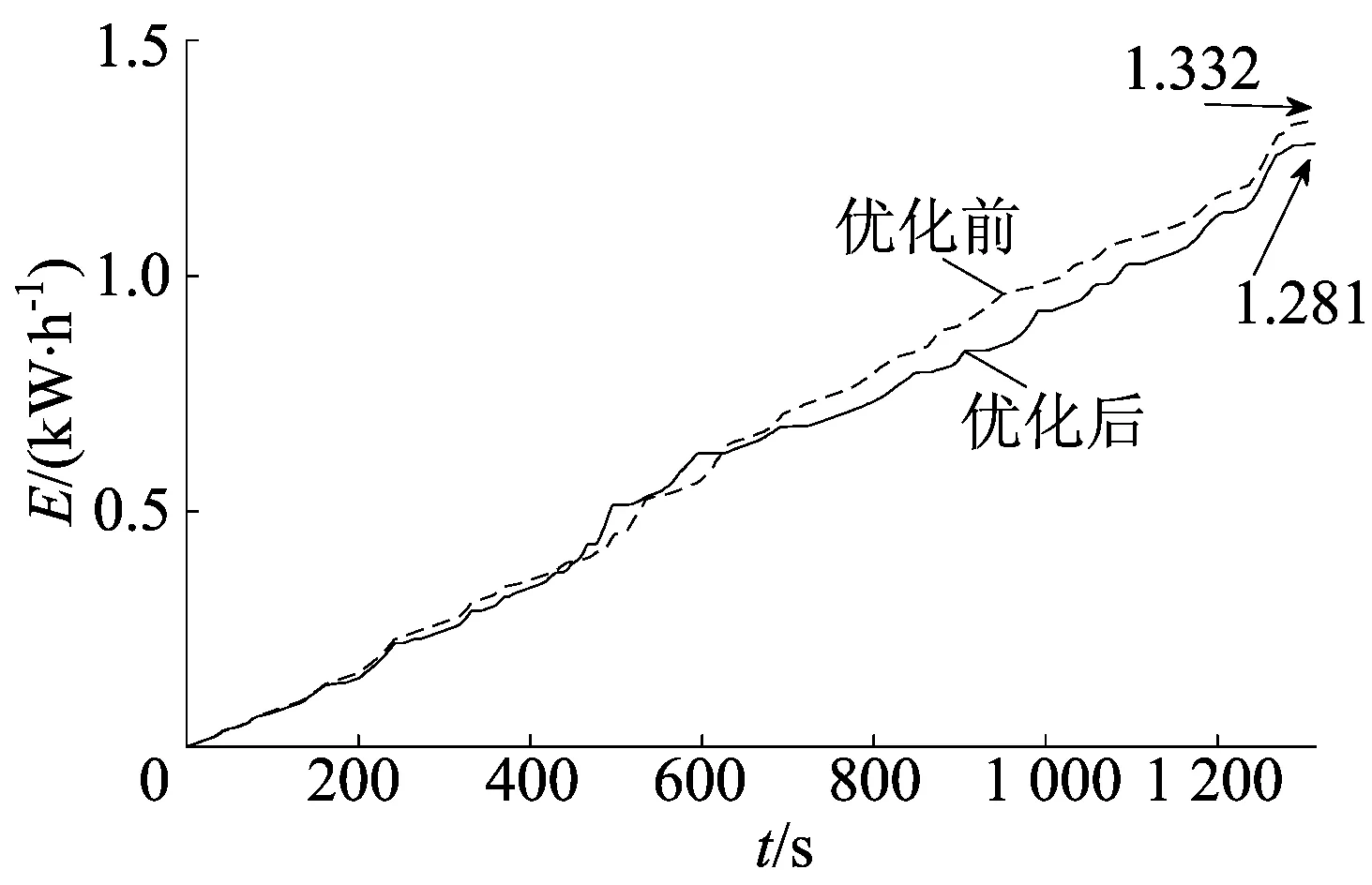
图11 CCBC工况下优化前后电能消耗量对比
由图10、图11可知,在整个CCBC工况中,除500~620 s急加速和急减速工况外,任一时刻优化后车辆消耗的能量比优化前有所减少,经过优化后在整个CCBC工况下消耗的电能从0.300 4 kW·h降到了0.288 7 kW·h。由表4可知优化后车辆的比能耗从0.043 6 kW·h/(km·t)降到了0.041 9 kW·h/(km·t),经济性提高了3.9%,55 km/h等速行驶续驶里程也提高了3.4%,因此通过传动系参数优化,整车的能量消耗得到了降低,经济性得到了提高。综上所述,通过Simscape与NSGA-Ⅱ相结合的OML,纯电动中型客车的动力性和经济性均得到了不同程度的提升,达到了多目标协同优化的目标。
5 结 论
(1) 本文以运行于城市非主干道上的中型电动客车为研究对象,针对纯电动中型客车动力系参数优化问题中参数多、高度非线性等特点,选择传动系参数中对整车性能影响最大的变速器传动比为优化变量,以车辆动力性和经济性为优化目标,利用Simscape物理建模工具建立纯电动客车模型,结合NSGA-Ⅱ多目标遗传算法对纯电动客车传动系参数进行模型在环优化,并基于最小二乘组合赋权法进行Pareto非劣解集选优,最终确定出能够兼顾动力性和经济性的最优解。
(2) 优化结果表明,本文采用的OML方法能够从NSGA-Ⅱ算法的Pareto非劣最优解集中得到一组最优解,使得变速器的传动比在约束条件范围内得到了合理的减小,并且在动力性方面,最高车速提高了0.37%,加速性能提高了6%,在经济性方面,比能耗降低了3.9%,续驶里程增加了3.4%,优化后整车的动力性和经济性得到了有效的提升,达到了整车性能协同优化的效果。因此,OML方法是一种有效的车辆动力性能优化方法,不仅提高了电动客车的动力性,也改善了电动客车的经济性,具有一定的工程应用价值。
[1] LI Liang,ZHANG Yahui,YANG Chao,et al.Hybrid genetic algorithm-based optimization of powertrain and control parameters of plug-in hybrid electric bus[J].Journal of the Franklin Institute,2015,352(3):776-801.
[2] HEGAZY O,VAN MIERLO J,BARRERO R,et al.PSO algorithm-based optimal power flow control of fuel cell/supercapacitor and fuel cell/battery hybrid electric vehicles[J].COMPEL-The International Journal for Computation and Mathematics in Electrical and Electronic Engineering,2013,32(1):86-107.
[3] MONTAZERI-GH M,POURSAMAD A,GHALICHI B.Application of genetic algorithm for optimization of control strategy in parallel hybrid electric vehicles[J].Journal of the Franklin Institute,2006,343(4/5):420-435.
[4] 吴光强,陈慧勇.基于遗传算法的混合动力汽车参数多目标优化[J].汽车工程,2009,31(1):60-64.
[5] 周兵,江清华,杨易.两挡变速器纯电动汽车动力性经济性双目标的传动比优化[J].汽车工程,2011,33(9):792-797.
[6] 周兵,江清华,杨易,等.基于行驶工况的纯电动汽车比能耗分析及传动比优化 [J].中国机械工程,2011,22(10):1236-1241.
[7] CHRIS M,ABUL MASRUR M,GAO Wenzhong.Hybrid electric vehicles:principles and applications with practical perspectives[M].New York:John Wiley & Sons,2011.
[8] 陈建宏,苏庆列,曹红,等.纯电动中型客车驱动电机参数匹配及性能研究[J].湖北汽车工业学院学报,2014,28(3):47-50.
[9] 郝定坤.纯电动中型客车动力系统参数匹配及性能研究[J].电子科技,2015,28(8):106-111.
[10] 周云山,贾杰锋.基于正交试验设计和多目标遗传算法的HEV参数优化[J].汽车安全与节能学报,2014,5(4):324-30.
[11] 王润才,何仁,俞剑波,等.基于遗传算法的插电式串联混合动力汽车动力参数优化[J].中国机械工程,2013,24(18):2544-2549.
[12] 葛安林,林明芳,吴锦秋.汽车动力传动系统参数的最佳匹配[J].汽车工程,1991,13(1):35-42.
[13] 王震坡,姚利民,孙逢春.纯电动汽车能耗经济性评价体系初步探讨[J].北京理工大学学报,2005,25(6):479-482.
[14] 程方晓.基于自适应保持多样性遗传算法的汽车动力传动系多目标优化[D].长春:吉林大学,2011.
[15] FONSECA C M,FLEMING P J.An overview of evolutionary algorithms in multiobjective optimization [J].Evolutionary Computation,1995,3(1):1-16.
[16] 徐立友,李晴,周志立.一种改进遗传算法在离合器参数优化中的应用[J].中国机械工程,2015,26(24):1-6.
[17] KALAIVANI L,SUBBURAJ P,WILLJUICE IRUTHAYARAJAN M.Speed control of switched reluctance motor with torque ripple reduction using non-dominated sorting genetic algorithm (NSGA-Ⅱ)[J].International Journal of Electrical Power & Energy Systems,2013,53:69-77.
[18] 马敬花,贾秀芳.最小二乘意义下主客观评价一致的电能质量综合评估[J].电力科学与工程,2013,29(4):18-23.
(责任编辑 张 镅)
Optimization with model in loop for middle-size electric bus drive-train parameters
XU Shiwei, HE Yilin, LIU Wei, ZHAO Xuan
(School of Automobile, Chang’an University, Xi’an 710064, China)
For the problems of middle-size electric bus drive-train parameters optimization, an optimization with model in loop(OML) was applied to optimizing the drive-train parameters. In this method, transmission ratio was chosen as optimization variables, and vehicle dynamics along with economy performances were chosen as optimization objectives simultaneously. Simscape physical modeling tool was used to build electric bus model, and the non-dominated sorting genetic algorithm Ⅱ(NSGA-Ⅱ) was employed for the optimization. Then the final optimal solution was obtained using Pareto selection based on least squares method combining with coefficient weights. The optimization results show that OML can reasonably optimize the transmission ratio within the constraints ranges. The acceleration time and specific energy consumption decreased by 6% and 3.9% respectively. Therefore, this optimization method can achieve the collaborative optimization, and provide a theoretical reference for the real vehicle development.
middle-size electric bus; drive-train parameters optimization; optimization with model in loop(OML); Simscape physical modeling tool
2016-03-17;
2016-06-23
国家高技术研究发展计划(863计划)资助项目(2012AA111106);国家自然科学基金青年科学基金资助项目(51507013);陕西省工业科技攻关资助项目(2016GY-043);陕西省自然科学基础研究计划青年人才资助项目(2016JQ5012)和中央高校基本科研业务费专项资金资助项目(310822173201;310822151025;310822161002)
许世维(1987-),男,河南漯河人,长安大学博士生; 赵 轩(1983-),男,陕西汉中人,博士,长安大学副教授,硕士生导师.
10.3969/j.issn.1003-5060.2017.04.005
U463.212
A
1003-5060(2017)04-0453-08
