超低空重装空投纵向自抗扰控制
2017-05-03赵世伟孙秀霞贾文铜路耀军
赵世伟,孙秀霞,贾文铜,路耀军
(1.空军工程大学航空航天工程学院,西安710038;2.解放军93802部队,陕西咸阳712201)
超低空重装空投纵向自抗扰控制
赵世伟1,孙秀霞1,贾文铜1,路耀军2
(1.空军工程大学航空航天工程学院,西安710038;2.解放军93802部队,陕西咸阳712201)
针对超低空重装空投过程中,货物的持续移动及瞬间出舱对载机产生的干扰力矩严重影响空投任务的完成性甚至危及飞行安全的问题,提出了一种基于自抗扰理论的超低空空投运输机纵向控制律设计方法。将气动参数摄动、未建模动态等不确定因素都归结为“未知扰动”,利用扩张状态观测器对扰动进行实时估计和补偿,实现了飞机内环速度和俯仰角的解耦控制,保证了系统鲁棒性,结合外环PID高度保持控制器完成整个飞行控制系统的设计。数值仿真结果表明,该系统具有良好的响应特性,且对系统不确定性具有较强的鲁棒性。
超低空空投,解耦控制,自抗扰控制,鲁棒性
0 引言
超低空空投以其可躲避敌方雷达、空投精度高并且对货物损伤程度小等优势在现代战争中正得到日益广泛的应用[1-2]。与传统飞行不同的是,重装空投过程中,载机由于受到货物的扰动而导致飞行姿态、速度、高度等状态大幅度变化,甚至威胁飞行安全。同时,地面效应增加了载机运动的不确定性并对飞行安全和空投任务的完成具有不利的影响[3]。由于允许下降高度的限制,超低空飞行条件对飞机在受到扰动时恢复到理想状态的调节能力提出了比常规飞行更高的要求。因此,针对运输机重装空投纵向控制器的研究具有重要的意义。
当前,针对超低空空投的非线性控制方法,许多学者做出了卓有成效的研究:其中变结构控制方法[4]在应对参数摄动的影响方面表现出了很好的效果;但该控制律在实际控制中容易出现控制量饱和的问题。反馈线性化方法[5]可以在不改变系统原有性能的前提下将复杂的非线性化模型线性化;但该方法对系统模型的精确性提出了严格的要求。H∞控制[6]不依赖于充满不确定性的空投系统;但随着实际应用中空投货物质量的加大,该控制方法已难以达到理想的控制效果。针对这一现状,需要设计一种符合超低空空投任务特点、安全性要求且工程易于实现的控制方法。
自抗扰控制(Active Disturbance Rejection Control,ADRC)技术是韩京清教授提出的一种非线性控制方法[7],它是基于“误差反馈调节”的PID控制思想的精髓,将系统外部扰动、参数摄动、未建模动态、系统内部各状态耦合影响等所有不确定因素都归结为“未知扰动”并通过扩张状态观测器(ESO)对未知扰动进行实时估计,进而实现对扰动的补偿。该方法已在飞机超机动控制、电力系统及电机控制等诸多领域得到应用并取得了良好的效果。
1 超低空空投运输机纵向模型
运输机在空投过程中,除了受到气动力和气动力矩外,还受到货物对飞机的干扰力和干扰力矩。其空投过程阶段及受力示意图如图1所示。

图1 运输机空投过程及受力分析图
飞机的纵向运动方程为:
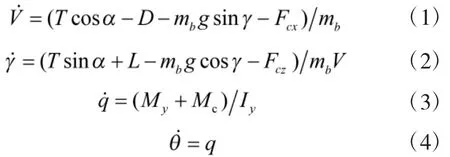
式中:Fcx、Fcz分别表示货物对飞机的干扰力在航迹轴系上的分量,其余各符号具体含义参见文献[8]。
考虑到飞机在空投过程中可能受到的未知扰动及系统未建模动态等因素,可将式(1)~式(4)改写为:
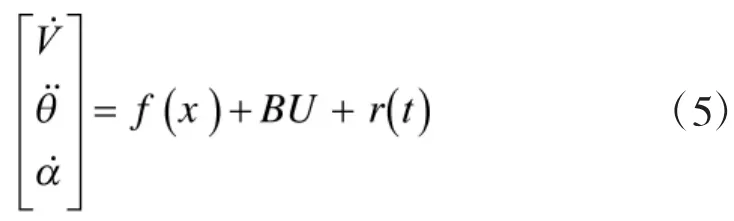
图2 控制系统总体结构图
2 控制器设计
2.1 空投纵向控制器的总体结构
如图3所示,基于运输机重装空投的安全性和实际任务需求考虑,飞机在空投过程中外环需要控制飞行高度以防发生触地危险;内环要控制飞行速度及俯仰角。其中,外回路通过PID控制器得到俯仰角期望指令,在内环路分别设计一阶和二阶ADRC控制飞机速度和俯仰角。
2.2 自抗扰控制器设计
通过对俯仰、速度通道分别设计独立的自抗扰控制器来实现飞机状态的解耦,以俯仰通道为例,设计二阶控制器,如图3所示。

图3 俯仰通道控制器设计图
其中,跟踪微分器的作用是产生θd1来安排俯仰角指令的过渡过程,使得在初始阶段误差的反馈不至于过大从而避免系统的震荡;同时产生可滤除噪声干扰的俯仰角指令的微分信号θd2。扩张观测器在不依赖于系统具体精确模型的情况下,通过系统输出量就可实现对系统状态z1、z2极其扰动的总和z3的实时预测。取控制律为:

将u=uθc代入式(5)可得

即通过对扰动的实时反馈补偿实现了非线性系统的线性化,进而提高了控制器的效果和鲁棒性。
根据分离性原理可对自抗扰控制器的跟踪微分器、扩张状态观测器及误差非线性组合部分分别进行独立设计,最终组合成为完整的控制器。各部件的参数选取原则参照文献[9]。
2.3 控制器算法
由2.2分析知,外回路高度控制采用PID获得俯仰角的指令,即

两个子回路的控制器算法分别为:
①速度子回路
跟踪微分器(TD)
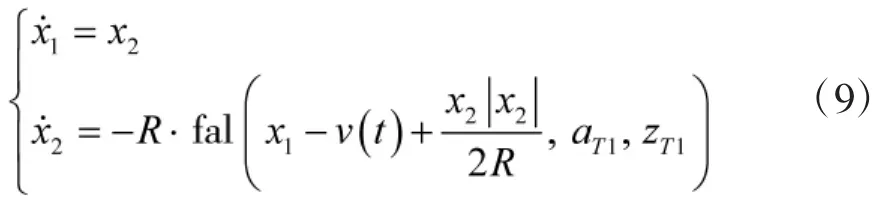
其中,v(t)是期望的速度指令,x1、x2分别表示含有过渡过程的速度、加速度指令。
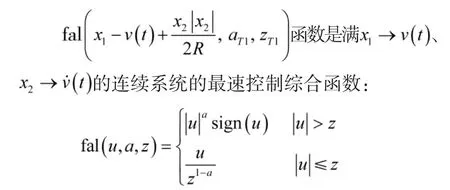
R表示跟踪速度,a是非线性指数,z是非线性饱和区。
扩张状态观测器(ESO):
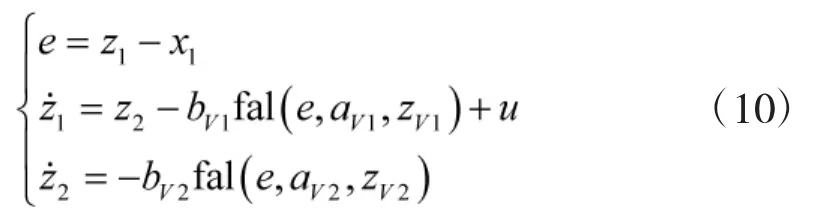
其中,z1为ESO对速度指令的估计,z2是对速度通道扰动进行估计的扩张状态量。
控制量:

kV表示控制量增益,这里的fal(·)函数是对误差的非线性组合。
②俯仰角子回路
俯仰角回路的TD形式上同速度子回路的TD。扩张状态观测器:
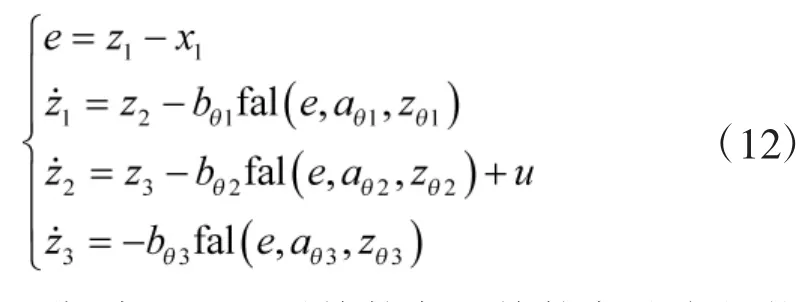
其中,z1、z2分别是ESO对俯仰角、俯仰角速度的状态估计,z3是对扰动估计的扩张状态量。
控制量:

kθ1、kθ2分别为误差、误差微分的非线性函数增益。
3 仿真分析
基于1中建立的运输机动力学模型和2中所设计的控制器,以执行超低空空投的某大型运输机为例进行仿真来分析重装空投的特点,并验证该控制器在重装空投中的控制性能及鲁棒性。
仿真初始条件为:
空投初始高度为10 m,飞行速度为80 m/s,飞机襟翼偏度始终为25 deg。控制器参数设置如下:
外环参数:

内环参数:
其中,速度和俯仰角两个子回路的TD参数相同: R=100,aT1=0,zT1=0.002 5;其余参数为:
飞机在货物质量分别为4 000 kg和8 000 kg时进行空投时的纵向开环响应如下页图4所示。可以看出,在不施加控制作用条件下,随着货物向舱门的不断移动,飞机高度、速度及俯仰角的持续变化。在这个过程极易引发飞机尾部触地、失速等危险,当货物离机瞬间,扰动突然消失,又会造成飞机受力情况的突变,使得飞机出现振荡。
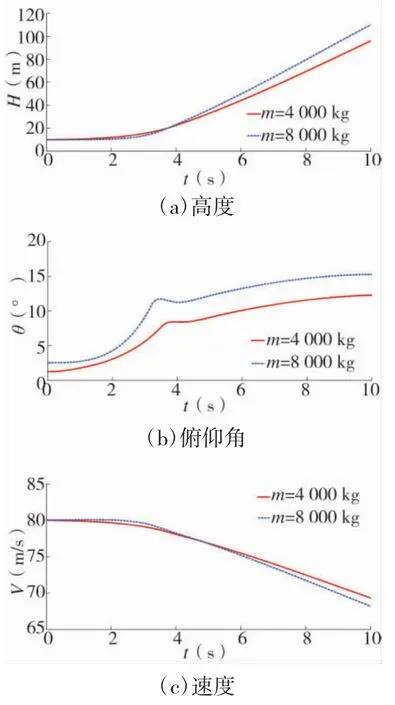
图4 自然飞机空投纵向状态量
图5给出的是在空投货物分别为4 000 kg和8 000 kg的情况下采用ADRC控制的空投响应曲线。结果表明,载机在空投过程中高度变化很小;俯仰角和速度在货物出舱后5 s内已达到稳态值,说明该控制器很好地实现了纵向耦合状态量的解耦控制。图6给出的是当货物质量为8 000 kg、气动参数摄动±20%时,保持控制器参数不变情况下的动态响应。可以看出,采用该控制器能取得理想的控制效果,表明该控制器具有很强的鲁棒性。
4 结论
重装空投对飞机的纵向动态响应提出了比常规飞机更高的要求。针对超低空空投相较于常规飞行在纵向各状态量呈现出强非线性、强耦合的特性:①本文将货物对飞机的影响视为扰动进行分离体建模,通过数值仿真表明该模型符合空投的工程实际。②利用ADRC可实现状态量的解耦控制且对扰动具有良好估计补偿能力的优点,仿真表明了该控制器的有效性。③在保持控制器参数不变的情况下,通过不同质量的货物、参数摄动±20%的条件下的仿真验证了该方法的强鲁棒性。本文所设计的控制器对于安全、有效地实现超低空空投具有重要的意义。
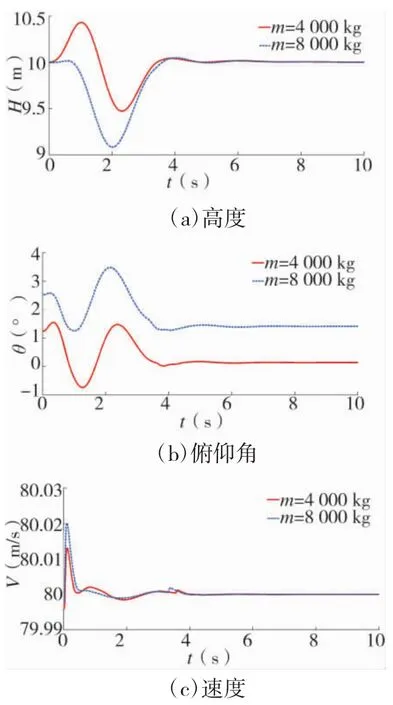
图5 基于控制器的空投纵向状态量
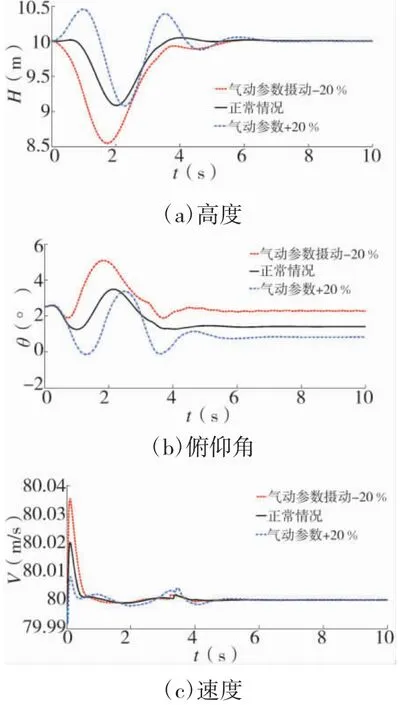
图6 参数摄动下飞机空投纵向状态量
[1]DESABRAIS K J,RILEY J,SADECK J,et al.Low-cost high-altitude low-opening cargo airdrop systems[J].Journal of Aircraft,2012,49(1):349-54.
[2]THOMAS J.Coupled simulation of cargo airdrop from a generic military transport aircraft[R].2011.Report No:AIAA-2011-2566.
[3]朱广东,李颖晖,李雪松,等.GPA准则在驾驶员诱发振荡预测中的应用[J].火力与指挥控制,2012,37(7): 10-14.
[4]ZHANG H Y,SHI Z K.Variable structure control of catastrophic course in airdropping heavy cargo[J].Chinese Journal of Aeronautics,2009(22):520-527.
[5]杨雨,陆宇平.运输机超低空重装空投纵向反步滑模控制研究[J].航空学报,2012,33(12):2301-2312.
[6]FENG Y L,SHI Z K,TANG W.Dynamics modeling and control of large transport aircraft in heavy cargo extraction[J]. Journal of Control Theory and applications,2011,9(2): 231-236.
[7]韩京清.自抗扰控制技术[M].北京:国防工业出版社,2008.
[8]LIU R,SUN X X,DONG W H.Dynamics modeling and control of a transport aircraft for ultra-low altitude airdrop[J]. Chinese Journal of Aeronautics,2015,28(3):478-487.
[9]孙逊,章卫国,杨婷婷,等.基于免疫粒子群算法的自抗扰飞行控制器设计[J].火力与指挥控制,2009,34(11): 104-107.
Active Disturbance Rejection Control for Longitudinal Movement of Ultra-low Altitude Heavyweight Airdrop
ZHAO Shi-wei1,SUN Xiu-xia1,JIA Wen-tong1,LU Yao-jun2
(1.School of Aeronautics and Astronautics Engineering,Air Force Engineering University,Xi’an 710038,China;2.Unit 93802 of PLA,Xianyang 712201,China)
In order to dealing with the influence on the airdrop task implementation and the flight safety caused by the continuous movement of cargo and its extraction suddenly during the process of ultra-low altitude heavy-cargo airdrop,a control law for longitudinal movement of ultra-low altitude heavy-cargo airdrop based on Active Disturbance Rejection Control(ADRC)theory is designed. Aerodynamic parameter,unmolded dynamics and other uncertain factors are boiled to“unknown disturbance”,and which are real-time estimated and compensated through the extent state observer(ESO)to achieve the decoupling control of the velocity and the pitching angle within the inner circle,which guarantees the robustness of the system.Combining with the PID altitude holder for outer ring,the controller realizes the whole control system.The simulation results provide sufficient support to the effectiveness and robustness of this proposed controller.
ultra-low-altitude airdrop,decoupling control,active disturbance rejection control(ADRC),robustness
V249.1
A
1002-0640(2017)04-0006-04
2016-02-18
2016-04-29
国家自然科学基金(61273141);航空科学基金资助项目(20141396012)
赵世伟(1992-),男,甘肃正宁人,硕士研究生。研究方向:先进控制理论与应用。