无人机感知避让技术分析
2017-05-03景晓年梁晓龙张佳强朱磊
景晓年,梁晓龙,张佳强,朱磊
(空军工程大学空管领航学院,西安710051)
无人机感知避让技术分析
景晓年,梁晓龙,张佳强,朱磊
(空军工程大学空管领航学院,西安710051)
无人机的安全性能特别是防相撞能力是影响无人机发展的一个重要因素,无人机感知避让技术是防止无人机发生相撞事故的重要保证。为了解和发展无人机感知避让技术,从无人机空中态势感知、飞行冲突预测和飞行冲突解脱3个方面对当前感知避让技术的研究现状进行了总结介绍,探讨了无人机防相撞工作的发展趋势。
无人机,感知避让,态势感知,冲突预测,冲突解脱
0 引言
随着科技的发展进步,无人机在军民等领域得到了广泛应用[1]。发展和应用带来大量的无人机飞行活动,这直接影响到复杂空域内的飞行安全。空中相撞和地面撞击是无人机可能引发的主要安全威胁[2]。空中相撞包括无人机与无人机相撞和无人机与有人机相撞,其中,无人机与有人机之间相撞会造成更为严重的后果,因而是主要的研究对象。为了防止发生无人机与有人机相撞这类严重的飞行事故,目前普遍采取物理隔离的方法,将无人机限制在特定的空域内活动[3]。
但无人机不会一直被限制在特定的空域内,与有人机共享空域是无人机发展的趋势,无人机的安全水平成为判断无人机是否可以进入有人机空域的标准[4]。防撞问题是决定无人机安全水平高低的一个主要因素,本文对无人机防撞的关键技术-感知避让技术进行了归纳总结,分别介绍分析了感知避让系统中的空中态势感知技术、冲突预测技术和冲突解脱技术,最后对无人机感知避让技术进行了总结与展望。
1 无人机感知避让技术
有人机上的飞行员可通过“看见-规避”的方式来判断当前态势、针对威胁作出决策并完成规避工作以保证飞行安全,对于无人机采用的则是“感知-避让”技术[5]。感知避让过程分为环境态势感知、飞行冲突预测和飞行冲突解脱3个部分,无人机通过自身携带的传感器对当前空域内的环境进行探测,利用通信网将周围态势向合作目标进行传输,系统预测未来一段时间内的飞行路线上是否存在飞行冲突,自动生成决策指令并执行规避动作以应对突发威胁,确保飞行安全,感知避让流程如图1所示。
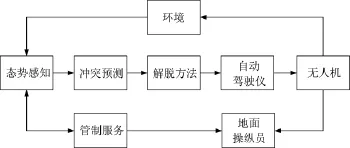
图1 无人机感知避让流程图
感知-避让系统作为保障无人机安全运行中一个重要的环节,需满足以下几点需求:首要目的是执行间隔规定避免与有人机(无人机)碰撞;次要目的是在违反间隔规定时进行自动防撞规避;必须同有人机一样保证安全,技术水平上与飞行员“看见-规避”能力相当;与机载防撞系统兼容(或者两者没有冲突)。
2 无人机空中态势感知方法
无人机态势感知就是利用自身携带的探测设备感知周围环境,提取相关属性,获取周边信息的过程[6]。不同的传感器可探测感知的目标也不同,因此,根据无人机所携带使用的传感器类别将无人机态势感知方法分为合作型和非合作型两种。
2.1 合作型感知探测
合作是指无人机与周围的航空器同属一方,它们之间可相互通信,能够通过共同的通信链路共享当前空域的态势信息。目前的合作型探测设备有空中交通告警与防撞系统(TCAS)和广播式自动相关监视系统(ADS-B)等,装载有这些设备的无人机可通过通信链路获取合作型目标的状态信息。
空中交通告警与防撞系统[7]主要由应答机、收发机、告警计算机和告警显示装置等组成,设计的目的是防止航空器在空中发生相互碰撞,保证飞行安全。最初TCAS只是装载在有人机上,然而无人机同样可以使用,只是目前该设备对于无人机平台来说较为昂贵,这就在一定程度上妨碍了TCAS在无人机领域的广泛应用。
广播式自动相关监视技术[8]是一种相对较新的技术,该系统由信息源、信息传输通道和信息处理与显示3部分组成,ADS-B的应用给航空器防相撞工作带来了新的解决方法。与其他合作型探测设备相比,ADS-B具有信息全面、精度高、更新速度快等优势,通过精确实时的信息交互为无人机提供决策引导,实现感知避让。ADS-B的体积和重量在一定程度上限制了其在小型无人机上的应用,为使ADS-B可应用于小型无人机,Robert C.Strain等研究了一套低重量、便携式的ADS-B系统[9];Florent Martel等人在北达科他大学研究的基础上利用ADS-B为核心组件研制了一套可用于小型无人机的4D防撞系统[10]。
2.2 非合作型感知探测
非合作表示无人机与空中的其他航空器或物体之间没有通信关系,无法共享各自的状态信息,因此,无人机只能采取主动探测的方式对周围环境进行感知。雷达和视觉传感器等是目前常用的非合作型探测设备,能够主动探测周围一定范围内包括各类航空器和鸟类在内的所有物体。
雷达[11]是利用电磁波进行目标探测的电子设备,通过接受物体反射回的回波来获取目标的距离、方位和高度等信息。雷达在防止航空器相撞上的研究应用已较为成熟,能有效发现潜在的飞行冲突,为航空器的飞行提供决策依据。雷达的探测范围和精度与雷达的天线大小有关,天线越大则范围越远、精度越高,天线的大小直接影响到雷达设备的重量。同ADS-B等合作型探测设备相同,重量问题也极大地限制了高精度探测雷达在小型无人机上的应用。对此,丹佛大学的无人系统研究所研究开发了一种只有340 g重的可供小型无人机携带使用的相控阵雷达系统。
光电传感器[12]的检测元件是光电元件,首先将被探测目标的状态变化量转换成光信号的变化,然后通过光电元件将光信号转换成电信号进而传输给计算机系统进行分析。光电传感器技术已相当成熟且具有无源性和鲁棒性等特点,与其他设备相比较有明显的优势,因此,适合作为感知探测设备应用于无人机感知避让系统。在小型化方面,光电传感器正向着体积小、重量轻的方向发展,使得它们可以在小型无人机上发挥优势作用。
3 无人机飞行冲突预测方法
无人机飞行冲突预测是在对周围环境进行感知并获得当前态势的基础上采取某种预测方法对未来一段时间内的飞行状态作出推测,判断是否存在飞行冲突,是无人机感知避让的关键环节。目前,主要预测方法有概率分析法和几何分析法。
3.1 概率分析法
概率分析法是在通过建立概率性冲突预测模型来预测判断航空器在未来一段时间内是否存在飞行冲突。Lygeros P J和Prandini M提出了短期预测和中期预测两种模型,其中短期预测模型是预测航空器在几秒钟到几分钟内的飞行情况,此时若存在飞行冲突,则必须通过执行相应规避动作进行规避以防止发生碰撞;中期预测模型则是用来对未来数十分钟内的飞行情况进行预测,判断将来时间内有无飞行冲突,若存在飞行冲突则通过防撞算法进行机动以避免发生难以控制的短期冲突[13-14]。Yang L C等人着重研究了航空器意图对飞行轨迹的影响,采用在轨迹模型中包含航空器意图信息的概率估计方法,考虑航空器意图及其他干扰因素,利用蒙特卡罗法进行仿真来推测航空器的未来轨迹,并进行飞行冲突的预测[15]。陈晓波等人建立了一种基于概率方法的中期冲突预测模型,根据两航空器的相遇几何来计算最小偏移量,通过考虑航迹预测的误差模型来积分计算冲突发生的概率,仿真证明两机交叉角在30°~150°范围内相遇时,该方法具有良好的预测准确性[16]。
由于概率分析法是采取数学计算的方法求解飞行冲突可能发生的概率,计算量较大,现有计算机的处理速度尚不能满足实时计算的要求,因而概率性冲突预测法在实际中的应用受到很大的限制。
3.2 几何分析法
几何分析法是指利用几何方法建立确定性冲突预测模型,通过划设保护区等方法判断航空器之间是否存在冲突威胁。Folton采用计算几何的方法建立voronoi多边形,通过周围航空器的数量来分析发生碰撞的可能性,提高了预测的计算速度[17]。李彬等人考虑了航空器飞行途中随机因素和探测设备误差的影响,通过选取椭球状保护区模型建立了常速模型和冲突探测模型,运用卡尔曼滤波的方法对航空器的航迹进行预测,排除了不可能发生冲突的航空器进而减少了计算量[18]。Donald J M等人采用AOP(Autonomous Operations Planner)算法,将轨迹离散化,分割成点的集合,选取10 s间隔时间,两航空器首先进行时间的同步,然后根据算法预测是否发生飞行冲突[19]。
几何分析法通过建立几何模型来预测航空器的航迹及在未来时间段内是否存在飞行冲突,简单直观,计算量小,可以满足实际需要。但目前对几何分析法的研究大多停留在水平范围或垂直方向上的二维空间,局限性较大。
4 无人机飞行冲突解脱方法
无人机感知避让的最终目的是化解飞行冲突,在无人机自主预测到飞行冲突后,必须立即依据解脱方法进行机动,保证无人机与其他航空器的飞行安全。目前的冲突解脱方法主要有离散型解脱方法与连续型解脱方法两种。
4.1 离散型解脱方法
离散型方法是指通过对计划航路点的调整,在尽可能保持原航线的基础上得到最大可能的无冲突飞行路线。Mondoloni S等人通过考虑由航空器速度等原因带来的误差,建立了基于遗传规避算法的离散航路点模型,有效地解决了二维条件下的飞行冲突问题且在三维情况下也有较好的应用效果[20]。刘星等人应用遗传算法对自由飞行条件下的冲突探测与规避进行了一定的研究,通过较少的迭代运算可得最优解,且使航线接近理论上最省油的直线航线[21]。崔莉薇综合遗传算法与粒子群算法的优点,采用遗传粒子群算法解决了多机的飞行冲突问题,求解速度快且更接近于原航线[22]。
使用离散型解脱方法可以满足无人机正常飞行对安全距离的要求,且能够很好地处理少量航空器间的飞行冲突,但在解决大量航空器间的飞行矛盾时显露出弊端。
4.2 连续型解脱方法
目前的连续型解脱方法的研究主要是针对二维情况下的合作型目标,包括势场法、路径规划法和几何方法等。
势场法将生活中的吸引和排斥现象应用到航迹规划中,计划航路点对无人机是吸引作用,吸引无人机朝着目标方向飞行,同时,空域内的其他航空器或物体对无人机产生排斥的力,在引力与斥力的合力作用下,使无人机在尽可能保持原航线的基础上安全飞行。Sigurd K等将无人机所受合力表示为F合=γ×F引+(1-γ)×F斥,其中γ是引力常量,表示引力在无人机受力中所占的权重,当γ=0.66时,无人机可安全无碰撞地快速到达目标点[23]。Ghosh R采用与势场法原理类似的势能法,将每架航空器假设为一个正电粒子、目标点假设为负电粒子[24]。李惠光等人通过将相对速度矢量应用于人工势场法对势场函数作出改进,推导出基于速度矢量的引力函数和斥力函数,在经过改进的势场函数作用下,智能体可快速躲避障碍物到达指定位置[25]。李春涛等人在速度矢量场的基础上提出了一种二维动态实时航路规划方法,通过建立不同空间特征区域的速度场模型来对无人机的航路进行规划[26]。
无人机路径规划法就是指依据任务要求和周围的环境信息等因素,事先划设出一条从起点到终点的最优无碰撞路线。路径规划法的核心要素是算法,目前,主要应用的算法有动态规划法、A*搜索算法、遗传算法、蚁群算法和基于粒子群优化的航迹规划算法等。
几何算法具有直观简单易计算的特点,是无人机冲突解脱中常用的一种方法,典型的几何算法有最小接近点法(Point of Closest Approach,PCA)和碰撞锥方法(Collision Cone Approach,CCA)。
PCA的基本原理是根据无人机与其他航空器的当前状态信息计算双方到达最小接近点的时间和错开距离矢量rm,当‖rm‖≤R(最小安全间隔)且>0时表示存在飞行冲突,此时需采取避让措施进行规避。J.W.Park等人考虑到不同航空器因其机动性能的不同,其避撞的效率也有高有低,基于此提出一种矢量分担的解脱方法,相同时间内速度慢的航空器能够完成更多的机动动作因而在解脱过程中可分担更多的份额,这样就能充分发挥各自优势,最大程度上保证飞行安全[27]。
CCA的基本原理是划设一个以入侵航空器为中心的球体保护区,无人机到保护区的所有切线构成碰撞锥,调整无人机的相对速度与球体保护区相切,此时可求解无人机的最优解脱路线[28]。球体保护区模型通常以水平安全间隔作为避让半径来计算无人机的解脱路线,但在目前的安全间隔标准中,水平安全间隔远大于垂直安全间隔,以水平安全间隔作为无人机的避让半径会在一定程度上提高规避的机动量,造成航线的大幅偏离。相比之下,圆柱体模型[29]则有更好的应用效果。
连续型冲突解脱方法原理比较简单,有效地解决了二维空间内的飞行冲突问题,但三维空间内多机间的冲突解脱方法还需进一步研究。
5 结论与展望
无人机作为未来各领域的中坚力量,其安全性能必须得到保证,感知避让技术正是防止无人机与其他航空器等物体发生相撞事故的重要保障。态势感知、冲突预测和冲突解脱是无人机感知避让技术的三大关键技术。合作型感知探测和非合作型感知探测是目前无人机进行态势感知的主要方式,合作型探测设备可获取合作目标详细全面的状态信息,非合作型探测设备可获取探测空域内所有目标的信息;飞行冲突预测是无人机感知避让过程的关键环节,是在获取当前态势的条件下对未来空中飞行状况的一种推测,主要有概率分析法和几何分析法;飞行冲突解脱是支撑无人机规避威胁保证安全最关键的一环,是防止无人机相撞的最后一道屏障,目前主要有离散型和连续型两种解脱方法。
目前,无人机的防撞能力与有人机相比还存在差距,感知避让技术还不够成熟,冲突预测和解脱算法大多局限在双机和二维空间,尚不能满足无人机在保证飞行安全的前提下与有人机共享空域的要求。今后的研究将向多数据融合、智能化、实时性的方向发展,增强无人机对周围环境的探测能力、态势感知能力、预测冲突和解决冲突的能力,发展基于数据融合的多传感器组合方式进行探测,解决三维空间内多机间的冲突问题,大幅提高无人机的防撞能力和安全水平。同时,改进和完善无人机防撞制度和体系,将制度体系与防撞技术相融合是无人机防撞工作的又一发展趋势。
[1]KONSTANTINOS D,KIMON P V,LES A P.On integrating unmanned aircraft systems into the national airspace system[M].2nd ed.Berlin:The Springer Shop,2012:11-42.
[2]尹树悦,王少飞,陈超.无人机安全性指标要求确定方法研究[J].现代防御技术,2015,43(2):154-158.
[3]International Civil Aviation Orgnization.Unmanned air craft systems(UAS)[S].ICAO,Circular 328 AN/190,2011.
[4]Federal Aviation Administration.Special military operations[S].FAA Order JO 7610.4,2004.
[5]XAVIER P,LUIS D,JORGE R,et al.Requirements,issues,and challenges for sense and avoid in unmanned aircraft systems[J].J of Aircraft,2012,49(3):677-687.
[6]吴立珍,沈林成,牛轶峰,等.无人机战场环境感知与理解技术研究[J].系统仿真学报,2010,22(1):79-84.
[7]赵鑫.空中防撞与近地告警综合系统研究[D].南京:南京航空航天大学,2012.
[8]王琦.基于ADS-B的飞行航迹获取研究与实现[D].长春:吉林大学,2015.
[9]ROBERT C S,MATTHEW T D,MOODY J C.A lightweight,low-cost ADS-B system for UAS applications[C]//AIAA-2007-2750,2007.
[10]FLORENT M,MICHAEL M,NAIMA K,et al.Flight testing of an ADS-B-based miniature 4D sense and avoid system[C]//AIAA-2011-1419,2011.
[11]丁鹭飞,陈建春.雷达原理[M].北京:电子工业出版社,2009:1-12.
[12]何友,王国宏,彭应宁,等.多传感器信息融合及应用[M].北京:电子工业出版社,2007.
[13]LYGEROS P J,NILIM A,SASTRY S.A probabilistic framework for aircraft conflict detection[C]//AIAA Guidance,Navigation and Control Conference,Portland,OR,1999.
[14]PRANDINI M,HU J,LYGEROS J,et al.A probabilistic approach to aircraft conflict detection[J].IEEE Trans Intelligent Transport System,2000,1(4):199-220.
[15]YANG L C,JANMES K.Using intent information in probabilistic conflict analysis[C]//AIAA Guidance,Navigation,and Control Conference,Boston,MA,1998.
[16]陈晓波,宋万忠,杨红雨.一种基于概率方法的中期冲突探测算法[J].四川大学学报(自然科学版),2010,47(3):483-487.
[17]FOLTON N L.Airspace design:towards a rigorous specification of conflict complexity based on computational geometry[J].The Aeronautical Journal,1999,2(3):584-592.
[18]李彬,吴珍珍.基于航迹预测的飞行冲突探测[J].微处理机,2011(2):72-75.
[19]DONALD J M,VIVONA R.Strategic airborne conflict detection of air traffic and area hazards[R].Tech Report NASA Contract:NAS2-98005 RTO-29,TITAN Systems Corporation,SRC Division,2000.
[20]MONDOLONI S,CONWAY S.An airborne conflict resolution approach using a genetic algorithm[C]//AIAA Guidance,Navigation,and Control Conference andExhibit,Montreal,Canada,2001.
[21]刘星,胡明华,董襄宁.遗传算法在飞行冲突解脱中的应用[J].南京航空航天大学学报,2002,4(1):46-49.
[22]崔莉薇.基于遗传粒子群算法的多机飞行冲突解脱研究[D].重庆:重庆大学,2012.
[23]SIGURD K,HOW J.UAV trajectory design using total field collision avoidance[C]//Proceedings of the AIAA Guidance,Navigation and Control Confenerce,2003.
[24]GHOSH R,TOMLIN C.Maneuver design for multiple aircraft conflict resolution[C]//Proceedings of the American Control C onference,Chicago,Illinois,2000.
[25]李惠光,卫涛.基于速度矢量的机器人动态避障规划[J].武汉理工大学学报,2009,31(13):133-136.
[26]李春涛,易小芹,胡木.基于速度矢量场的无人机实时动态航路规划[J].南京航空航天大学学报,2012,44(3): 340-346.
[27]PARK J W,OH H D,TAHK M J.UAV collision avoidance based on geometric approach[C]//SICE Annual Conference,IEEE,2008:2122-2126.
[28]CARBONE C,CINIGLIO U,CORRARO F,et al.A novel 3d geometric algorithm for aircraft autonomous collision avoidance[C]//Decision and Control,2006 45th IEEE Conference on.IEEE,2006:1580-1585.
[29]LUONGO S,CORRARO F,CINIGLIO U,et al.A novel 3D analytical algorithm for autonomous collision avoidance considering cylindrical safetu bubble[C]//Aerospace Conference,IEEE,2010.
[30]沈培志,张邦钰,聂奇刚,等.基于蚁群算法的无人机航路规划辅助决策研究[J].四川兵工学报,2015,36(8): 145-148.
Analysis of UAV Sense and Avoid Technology
JING Xiao-nian,LIANG Xiao-long,ZHANG Jia-qiang,ZHU Lei
(School of Air Control and Navigation,Air Force Engineering University,Xi’an 710051,China)
The security performance of unmanned aerial vehicle(UAV)especially collision prevention ability is an important factor affecting the development of UAV.Sense and avoid technology is the important guarantee to prevent UAV from colliding.In order to understand and develop the sense and avoid technology,the current research statuses are summarized from air situation awareness,flight conflict detection and resolution.Finally,the development trend of UAV collision prevention work is explored.
unmanned aerial vehicle,sense and avoid,situation awareness,conflict detection,conflict resolution
V279
A
1002-0640(2017)04-0001-05
2016-02-05
2016-03-07
国家自然科学基金(61472442;61472443);陕西省自然科学技术研究发展计划(2013JQ8042);陕西省自然科学基础研究计划基金资助项目(2016JM6071)
景晓年(1990-),男,山东章丘人,硕士研究生。研究方向:航空集群理论与技术、冲突探测与解脱。