一种适用于航空DC/DC变换器短路限流的控制策略
2017-04-01任永宏张方华
任永宏,刘 硕,谢 敏,张方华
(南京航空航天大学自动化学院,南京 211106)
一种适用于航空DC/DC变换器短路限流的控制策略
任永宏,刘 硕,谢 敏,张方华
(南京航空航天大学自动化学院,南京 211106)
针对航空变换器在负载短路时需要输出3倍额定电流的要求,提出了一种适用于航空DC/DC变换器短路限流的控制策略。在传统电压-电流双环控制DC/DC变换器的基础上,引入输出电压前馈控制,即将输出电压作为前馈信号,与电流控制器的输出信号相加共同作为调制信号与三角载波交截。通过合理设计前馈系数,保证电流控制器的输出电压在负载短路前后基本保持不变,旁路了PI补偿网络的延时影响,使得短路瞬间占空比即时修正,有效抑制了短路瞬间的电流冲击。小信号建模分析表明,输出电压前馈的引入基本不会影响原双环控制系统的稳态和动态性能。仿真和实验均验证了该控制策略的有效性。
航空DC/DC变换器;输出电压前馈;电流冲击抑制;控制策略
270 V航空高压直流电源是现阶段飞机供电系统的发展方向[1-2]。为对某些机载28 V用电设备供电,需要高降压比DC/DC变换器[3]。为提高航空电气系统的供电可靠性,相关标准[4]要求航空DC/ DC变换器具有2倍额定负载电流的过载能力,并具有持续5 s输出3倍额定负载电流的短路能力。对于前级LLC直流变压器(LLC-DCT)、后级Buck变换器的两级式拓扑,前级LLC-DCT实现高降压比隔离输出,后级Buck变换器可实现稳压输出,且具备过载和短路能力[5-6]。
基于电压-电流双环控制的Buck变换器,具有高效率、动态响应快、过流保护等优点。当输出侧发生短路时,电压控制器的输出提供最大电流的限制信号,实现稳态短路限流[7-8]。但由于PI补偿网络含有积分环节,其延时特性使得误差放大器的输出不能立即响应短路时的负载阶跃,在负载短路瞬间会造成很大的电流冲击,影响系统的可靠性,甚至损坏功率器件[9-11]。
本文提出了一种适合于航空DC/DC变换器短路限流的控制策略。以Buck变换器为例,文章首先分析了短路瞬间电流冲击产生的原因,然后对所提出的控制策略进行原理分析。通过小信号建模分析了该控制策略对原控制系统稳态和动态性能的影响,并进行了仿真分析和实验验证。
1 短路电流冲击产生的本质原因
电压-电流双环控制的Buck变换器如图1所示。电压控制器比较电压基准vref与输出电压采样vf,其输出电压经过比例环节KCV分压后作为电流控制器的基准信号vCV,vCV与电感电流采样if比较后得到误差电压vCA,再与三角载波Vsaw比较得到占空比D,从而驱动开关管工作得到期望的输出电压Vo。其中比例环节KCV是短路限流值的采样电压与电压环正向饱和输出电压的比值。

图1 电压-电流双环控制的同步整流Buck变换器Fig.1 Double-loop controlled synchronous Buck converter
对于级联结构的DC/DC变换器,为了提高系统的效率,通常使Buck变换器稳态工作时的占空比接近最大值(如0.95)[12]。稳态时电感两端电压差vLf的平均值应该为0,即满足伏秒平衡,则电感电流的上升和下降斜率分别为

当负载发生短路时,输出电压采样vf快速降为0 V。而电压基准vref保持不变,因此电压外环的输出缓慢正向饱和,电流内环的基准电压vCV缓慢升高。由于电感电流不能突变,其采样值if并不会立即升高,所以电流内环的输出电压vCA有上升趋势。在电压-电流双闭环控制系统中,通常电流环的响应速度要比电压环快,且误差响应时间远大于一个开关周期,因此可认为vCA在短路瞬间恒定不变。经过若干个开关周期后,vCA下降到接近三角载波的最小值VsL,占空比减小到接近0,随后电流环的输出反向饱和,直到进入短路限流的稳态。因此,在此过程中,占空比由原稳态值Vo/Vin逐渐减小到短路稳态值(接近0)。短路后电感两端的电压差vLf和电感电流iLf波形如图2所示,达到短路稳态前vLf的平均值不再为0,即不满足伏秒平衡。由式(1)知电感电流iLf上升斜率约为Vin/Lf,下降斜率约为0,因此电感在此阶段处于单向磁化状态,导致产生很大的电流冲击。

图2 Buck变换器负载短路时的主要波形Fig.2 Key waveforms of Buck converter under shorted load
综上所述,Buck变换器短路电流冲击产生的本质原因是由于PI补偿网络的延时特性使得占空比不能即时修正,从而导致电感两端电压不满足伏秒平衡,电感的单向磁化导致产生电流冲击。
2 基于输出电压前馈的短路控制策略
2.1 短路控制策略的工作原理
本文提出了一种适合于Buck变换器短路运行的控制策略,该方法将输出电压作为前馈信号,与电流控制器的输出电压相加后共同作为调制信号[13],再与三角载波交截形成占空比D。其基于输出电压前馈OVFF补偿(output voltage feed-forward)双环控制Buck变换器原理框图如图3所示。

图3 基于OVFF补偿的双环控制Buck变换器原理框图Fig.3 Block diagram of double-loop controlled Buck converter with OVFF compensation
占空比D的表达式为

式中:VsH、VsL分别为三角载波的电压最大值和最小值;ve为与三角载波交截的调制信号电压,加入输出电压前馈后,有

式中:K为输出电压前馈比例系数;vCA为电流控制器输出电压。
加入输出电压前馈后Buck变换器的工作原理如下:当变换器在正常负载条件下工作时,对于电感电流连续模式CCM(continuous conduction mode),输出电压Vo为

此时调制信号ve由输出电压前馈信号KVo和vCA两部分构成,且输出电压前馈信号为主要成分。
当负载发生短路后,输出电压接近0 V,则输出电压前馈值也同时变为0。此时调制信号等于vCA,变换器对应占空比约为0,即

联立式(2)~式(5),可以求得

即前馈比例系数K为三角载波的峰峰值电压Vsaw与输入电压Vin的比值。
通过上述分析可知,若工作在CCM模式的电压型控制Buck变换器加入输出电压前馈,且前馈比例系数满足式(6)时,在变换器短路前后,电流控制器输出电压vCA保持不变。而输出电压前馈信号在变换器短路后快速降为0,那么调制信号ve在短路后发生骤变,使得占空比由原来的稳态值Vo/Vin即时修正为短路时稳态值0。占空比的即时修正可以保证电感两端电压vLf的平均值基本为0,即满足伏秒平衡,如图4所示。这样一方面可避免短路瞬间由于电感单向磁化导致的电流冲击,另一方面减少了两个稳态之间切换的暂态时间,提高了系统的动态响应速度。
综上所述,输出电压前馈的引入旁路了PI补偿网络的延时影响,使得短路瞬间对占空比进行即时修正,有效抑制短路瞬间的电流冲击。

图4 引入OVFF补偿后Buck变换器负载短路时的主要波形Fig.4 Key waveforms of Buck converter under shorted load with OVFF compensation
2.2 系统性能分析
输出电压前馈的引入抑制了Buck变换器短路瞬间的电流冲击,改善了输出侧短路瞬间的性能。为综合评价该控制策略,本节对引入输出电压前馈后的系统进行小信号建模,分析其对原双环系统性能的影响。
引入输出电压前馈后双环系统的控制框图及其等效变换如图5所示。图中,虚线为输出电压前馈环节。
Gvd(s)和Gid(s)分别为占空比对输出电压和电感电流的传递函数;G(s)和G(s)分别为电vi压调节器和电流调节器的传递函数;Hv(s)和Hi(s)分别为输出电压和电感电流的采样系数;Fm(s)为

图5 带OVFF补偿的DC/DC变换器控制框图Fig.5 Control block diagram of DC/DC converter with OVFF compensation
根据图5,引入输出电压前馈前变换器电流环的环路增益Ti(s)为

电流环开环时电压环的环路增益T(s)为

电流环闭环时电压环的环路增益Tv(s)为

引入输出电压前馈后,电流环闭环时电压环的环路增益Tv_F(s)为

对比式(9)和式(10),Tv_F(s)的分母中多出一项,记为GF(s),即

可以看出,输出电压前馈比例系数K越小,对应|GF(s)|越小,其对电压环的环路增益影响越小,则对原系统性能的影响越小。这是因为K越小,输出电压前馈信号KVo对调制信号ve的贡献越小。
CCM模式下理想Buck变换器的Gvd(s)、Gid(s)表达式分别为
式中,R为Buck变换器的负载电阻。
将式(6)、式(12)以及Fm(s)=1/Vsaw代入式(11)中,可得

图6为GF(s)与Ti(s)的幅频曲线。由图可知,|GF(s)|在低频段接近于1,在中频段(输出滤波器的谐振频率处)存在极大值,且略大于1,而在高频段则迅速衰减;在全频率范围内,|GF(s)|<<|Ti(s)|。因此,GF(s)对Tv_F(s)的影响甚微。

图6 GF(s)与Ti(s)的幅频曲线Fig.6 Amplitude frequency curves of GF(s)and Ti(s)

图7 引入OVFF补偿前后的环路增益对比Fig.7 Comparison of loop gains with and without OVFF compensation
将CCM模式下Buck变换器的Gvd(s)、Gid(s)、Fm(s)[8]以及经过设计的比列环节KCV、Hv(s)、Hi(s)和补偿环节Gv(s)、Gi(s)分别代入式(9)和式(10)中,通过Mathcad软件得到引入输出电压前馈前后系统的环路增益,如图7所示。由图可以看出,引入输出电压前馈前后,系统的环路增益曲线基本重合。因此,若前馈比例系数满足式(6)时,输出电压前馈控制基本不会影响原双环控制系统的稳态和动态性能。
3 仿真和实验验证
为了验证所提出控制策略的有效性,本文采用Saber仿真软件对电路系统进行仿真。仿真模型中Buck变换器的关键参数如表1所示。

表1 Buck变换器关键参数Tab.1 Key parameters of Buck converter
3.1 短路性能的仿真和实验验证
图8为不加输出电压前馈时Buck变换器负载短路时的仿真波形,图中vGS为开关管Q1的驱动电压。从图8(a)中可以看出,不加输出电压前馈时,Buck变换器在短路瞬间产生很大的电流冲击;图8(b)为短路瞬间图8(a)虚线框内的局部放大图,可以看出,由于电流控制器输出电压vCA缓慢下降导致占空比由原稳态值Vo/Vin逐渐减小到0,电感在此阶段的单向磁化造成电流冲击,验证了理论分析的正确性。
图9为引入输出电压前馈后Buck变换器负载短路时的仿真波形,其中K可根据式(6)计算得到,即


图8 未加OVFF补偿的Saber仿真Fig.8 Results of saber simulation without OVFF compensation


图9 加入OVFF补偿的Saber仿真波形Fig.9 Results of saber simulation with OVFF compensation
从图9(a)中可以看出,引入输出电压前馈后Buck变换器在短路瞬间几乎没有电流冲击,电感电流iLf从额定值28.6 A平稳过渡到短路限流值80 A;图9(b)为短路瞬间图9(a)虚线框内的局部放大图,可以看出,电流控制器输出电压vCA在短路前后保持不变,输出电压前馈的引入使得占空比即时修正,避免了电感单向磁化导致的电流冲击。
实验室搭建了一台原理样机,Buck变换器的主要参数与Saber仿真参数相同,如表1所示。其中控制芯片使用SG3525。
图10给出了引入OVFF补偿前后Buck变换器负载短路时的实验波形。由图10可知,实验结果与仿真分析结果一致,输出电压前馈的引入能有效抑制Buck变换器短路造成的电流冲击。需要说明的是,图10中短路后的电感电流iLf脉动较大,这是因为实际电路中所用控制芯片SG3525的占空比限制使得变换器进入Burst工作模式。

图10 OVFF补偿前后Buck变换器短路实验波形对比Fig.10 Comparison of waveforms for Buck converter with and without OVFF compensation
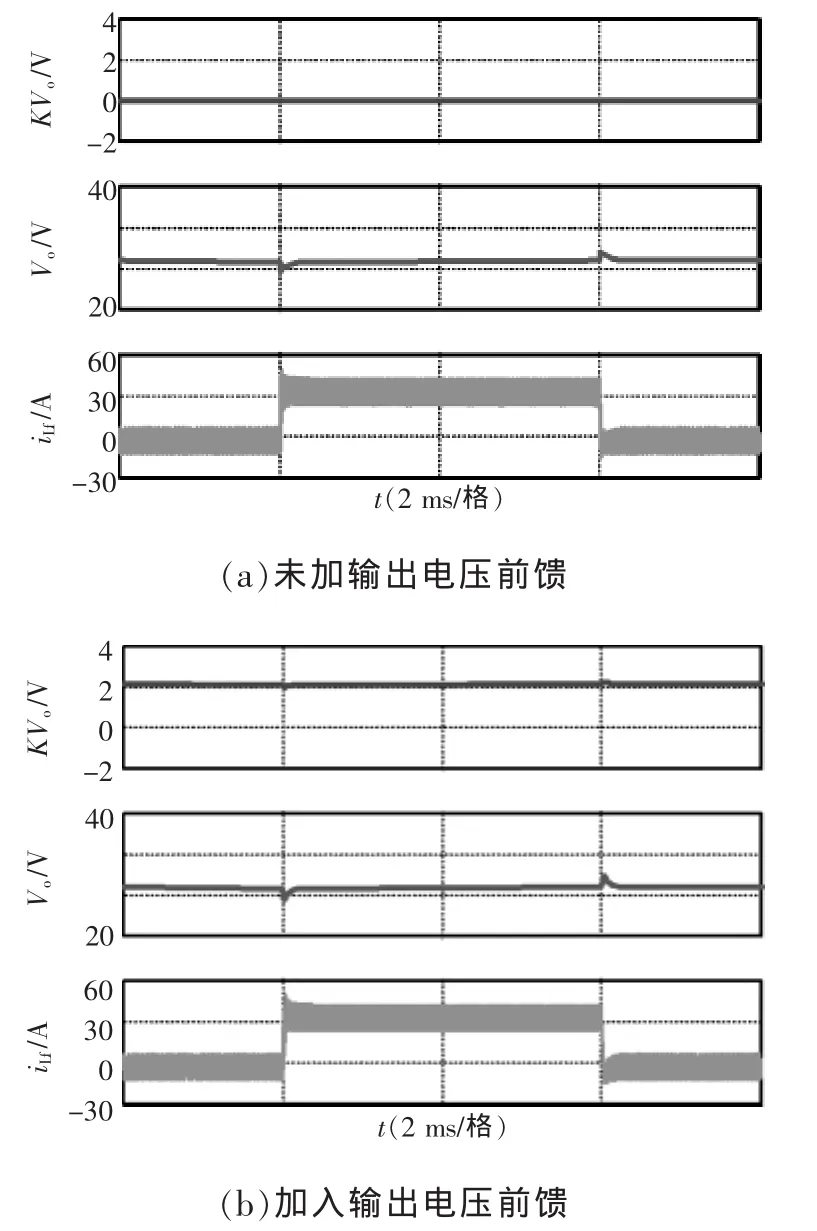
图11 Buck变换器突加突卸、负载仿真波形对比Fig.11 Comparison of the simulation waveforms for the sudden load and unload of Buck converter

图12 Buck变换器突加、突卸负载实验波形对比Fig.12 Comparison of the experimental waveforms for the sudden load and unload of Buck converter
3.2 动态性能的仿真和实验验证
图11为引入OVFF补偿前后Buck变换器突加、突卸负载(10%和90%额定负载之间)的仿真波形,图12为突加、突卸负载的实验波形。从图11、图12中可以看出,引入OVFF补偿前后,Buck变换器在突加、突卸负载的过程中系统动态响应时间基本相同,输出电压暂态过冲幅值基本相同。因此,输出电压前馈的引入基本不会影响原双环控制系统的动态性能。
3.3 稳态性能验证
图13为引入输出电压前馈前后Buck变换器的负载调整率。由图可以看出,2条负载调整率曲线基本重合,因此输出电压前馈的引入基本不会影响原双环控制系统的稳态性能。

图13 Buck变换器负载调整率对比Fig.13 Comparison of load regulation rate of Buck converter
4 结论
本文分析了造成双环控制Buck变换器短路瞬间产生电流冲击的原因,提出了一种基于输出电压前馈的短路控制策略。经过理论分析与仿真实验验证,可以得出以下结论:
(1)传统PI补偿网络的延时特性导致电感电压不满足伏秒平衡是造成短路电流冲击的本质原因。
(2)通过合理设计前馈系数,提出的输出电压前馈控制策略能够有效抑制短路瞬间的电流冲击。
(3)通过合理设计前馈系数,输出电压前馈控制的引入基本不会影响原双环系统的稳态和动态性能。
[1]秦海鸿,严仰光.多电飞机的电气系统[M].北京:北京航空航天大学出版社,2015.
[2]Avery C R,Burrow S G,Mellor P H.Electrical generation and distribution for the more electric aircraft[C].Universities Power Engineering Conference,2007,UPEC 2007, 42nd International,IEEE,2007:1007-1012.
[3]刘福鑫.高压直流电源系统中 DC/DC变换器的研究[D].南京:南京航空航天大学,2004. Liu Fuxing.Reaserch on DC/DC converter for HVDC power system[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2004(in Chinese).
[4]GJB 181B-2012,飞机供电特性[S].北京:中国人民解放军总装备部军标出版发行部,2012. GJB 181B-2012,aircraft power supply characteristics[S]. Beijing:General Armament Department of the people's Liberation Army of China Central Military Commission equipment development department,2012(in Chinese).
[5]Chen Hui,Wu Xinke.LLC resonant DC transformer(DCX)with parallel PWM output tight regulation[C].2014 IEEE Energy Conversion Congress and Exposition(ECCE).IEEE, 2014:4742-4747.
[6]石健将,章江铭,龙江涛,等.高频变压器一次侧串联LLC+输出端并联Buck级联直流变换器[J].电工技术学报,2015,30(24):93-102. Shi Jianjiang,Zhang Jiangming,Long Jiangtao,et al.A cascaded DC converter with primary series transformer LLC and output interleaved buck[J].Transactions of China Electrotechnical Society,2015,30(24):93-102(in Chinese).
[7]Matsuo H,Kurokawa F,Takeda T.Analysis of the dynamic characteristics in the overcurrent limited mode of the DCDC converter[J].IEEE Transactions on Power Electronics, 1989,4(2):175-180.
[8]杜雄,周雒维,孙鹏菊.双频Buck变换器的交流小信号模型与控制策略[J].电源学报,2007,5(1):40-47. Du Xiong,Zhou Luowei,Sun Pengju.AC small signal model and control of buck converter with double-frequency[J]. Journal of Power Supply,2007,5(1):40-47(in Chinese).
[9]Li Yanming,Mao Xiangyu,Wang Hongyi,et al.An improved hiccup mode short-circuit protection technique with effective overshoot suppression for DC-DC converters[J]. IEEE Transactions on Power Electronics,2013,28(2): 877-885.
[10]Luo Y K,Chiou C C,Wu C H,et al.Transient improvement by window transient enhancement and overshoot suppression techniques in current mode boost converter[J]. IEEE Transactions on Power Electronics,2011,26(10): 2753-2761.
[11]Wang P Y,Huang S Y,Fang K Y,et al.An undershoot/ overshoot-suppressed current-mode buck converter with voltage-setting control for type-II compensator[C].Solid-State Circuits Conference.IEEE,2015.
[12]Erickson R W,Maksimovic D.Fundamentals of power electronics[M].Norwell:MA.Kluwer,2011.
[13]Kazimierczuk M K,Edstrom A J,Reatti A.Buck PWM DC-DC converter with reference-voltage-modulation feedforward control[C].Circuits and Systems,2001.ISCAS 2001. The 2001 IEEE International Symposium on.IEEE,2001,3: 537-540.
An Improved Control Method for Aviation DC/DC Converter with Overshoot Suppression under Shorted Load
REN Yonghong,LIU Shuo,XIE Min,ZHANG Fanghua
(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China)
According to the requirement of three times of rated current when the load is shorted,an improved control method of shorted-load current-limiting for aviation DC/DC converter is proposed.Based on traditional doubleloop control DC/DC converter,the output voltage feed-forward(OVFF)control is introduced.The output voltage is taken as the feed-forward input signal,which is added with the output of the current controller as the modulation signal to achieve intersection with the triangle wave.Through rational design of feed-forward coefficient,it can be ensure that the output of the current controller is roughly constant when the load shorted,which bypasses the delay effect of PI compensation network and corrects the duty cycle instantly,so the current-overshoot can be suppressed effectively.Small signal modeling shows that OVFF control practically does not affect the steady-state and dynamic characteristics of the original double-loop control system.The effectiveness of the proposed control method is verified by both simulation and experiment.
aviation DC/DC converter;output voltage feed-forward(OVFF);overshoot suppression;control method
10.13234/j.issn.2095-2805.2017.2.024
TM 46
A
2016-10-24
国家自然科学基金资助项目(51377079);江苏省“青蓝工程”资助项目。
Project Supported by the National Natural Science Foundation of China(51377079);Qing Lan Project of Jiangsu Province.
