基于弹性铰链的仿人型肌电假手设计*
2017-01-05王念峰劳锟沂张宪民
王念峰 劳锟沂 张宪民
(华南理工大学 机械与汽车工程学院, 广东 广州 510640)
基于弹性铰链的仿人型肌电假手设计*
王念峰 劳锟沂 张宪民
(华南理工大学 机械与汽车工程学院, 广东 广州 510640)
截肢患者需要外形与人手相似、重量轻、体积小,并且具有人手大部分抓取功能和适当操作功能的假手,基于对人手骨骼结构和功能的分析,提出了一种仿人型肌电假手设计.该假手具有5只手指和4个自由度,分别由4个独立的驱动器进行控制;手指的关节基于弹性铰链进行设计,相邻的指骨间通过螺旋弹簧连接;除拇指外,每只手指均为单自由度,关节之间的运动通过腱驱动耦合实现;驱动系统设计安装在手掌内,具有紧凑的结构,对各个手指的运动灵活控制.通过对手指的运动学分析以及对假手功能的模拟证实,该假手能够实现日常生活中大部分的手势和抓取功能.
仿人型假手;弹性铰链;肌电控制
仿人型肌电假手[1]通过人体肌肉电信号(EMG)[2]进行控制,常被用于截肢患者的肢体复健,具有多自由度和拟人化等特点[3].理想假手应该具有与人手一样的形状、大小和功能.根据假手的性能特点,可分为装饰性假手、索控型假手和肌电假手3类.目前一些公司和研究机构在多功能仿人型肌电假手上做了很多研究[4- 10].现在的多自由度假手大多采用欠驱动、耦合连杆和模块化设计等技术,使得假手能在功能上与人手接近.商业型假手i-Limb具有5个独立驱动的手指,由两个肌电电极通过简单的开合信号进行控制[4];Dalley等[5]研发出一个具有16个关节的假手,通过5个独立的驱动器实现了8种手势的功能;Smarthand假手具有5个手指和4个自由度,通过40个传感器实现自动控制和反馈传递[6];Southampton Remedi Hand假手具有5个手指和6个自由度,其控制的反馈系统由动态压电测力传感器和压阻式电阻组成[7];UB Hand Ⅲ 假手手指的设计是基于弹性铰链连接刚性骨骼构件实现的,通过由腱鞘引导的肌腱进行手指的驱动[8];HIT/DLR假手具有5个手指,由3个电机驱动,通过多传感器实现自适应的功能[9];Zollo等[10]开发的假手具有3个铰接式的手指,由4个直流电机通过一个特殊的欠驱动传动机构进行驱动.以上的假手都具有与人手相似的外观和大小,能够实现日常生活中的各种抓握手势.由此可以得到仿人型假手的设计要求:①假手应具有与人手类似的装饰性外观,让使用者容易接受;②假手设计要轻巧、结构紧凑简单且易于加工;③抓握动作的可靠性高,能实现复杂的抓取功能;④能够及时准确地获取被抓物体的信息并做出相应的调整;⑤具有合适的抓取速度且能承受一定的力;⑥成本低、能耗少、噪音低,而且要易于维护、经久耐用.
基于对自然人手的骨骼结构和运动功能的分析,文中提出了一种仿人型肌电假手的设计.通过对手指的运动分析以及对假手进行仿真,展现了该假手多样的抓握能力.
1 人手分析和肌电假手的建模
根据人体构造学,人的自然手有5只手指,一共由27块骨头组成,其中包含有8块紧密结合的小腕骨[11],如图1所示.食指、中指、无名指、小指(又名尾指)分别有近节指骨、中节指骨、远节指骨3块指骨和掌骨.不同的是,拇指除了掌骨以外,只包含近节指骨、远节指骨2块指骨.
手指的关节连接着临近的2块骨头,不同的关节形成了各种不同的手指动作.除了拇指以外,其余四指中,指骨之间的关节依次是远指关节、近指关节、掌骨关节.远指关节和近指关节分别有1个自由度,完成弯曲/伸展运动;而掌骨关节具有2个自由度,可以完成弯曲/伸展和侧向摆动的动作[12].因此对于除拇指外的4只手指,每只手指具有4个自由度.不同的拇指骨骼构成也形成了拇指关节的独特性,使得拇指的作用占据了人手全部功能的40%左右[13].拇指中的关节依次是远指关节、近指关节和腕掌关节.除了远指关节和近指关节有1个自由度外,腕掌关节具有2个自由度,使得拇指可以完成弯曲/伸展和外展/内收的动作.因此,加上腕关节的2个自由度,人手一共有21个自由度,可以灵活地完成各种手势,与外界物体进行交互.
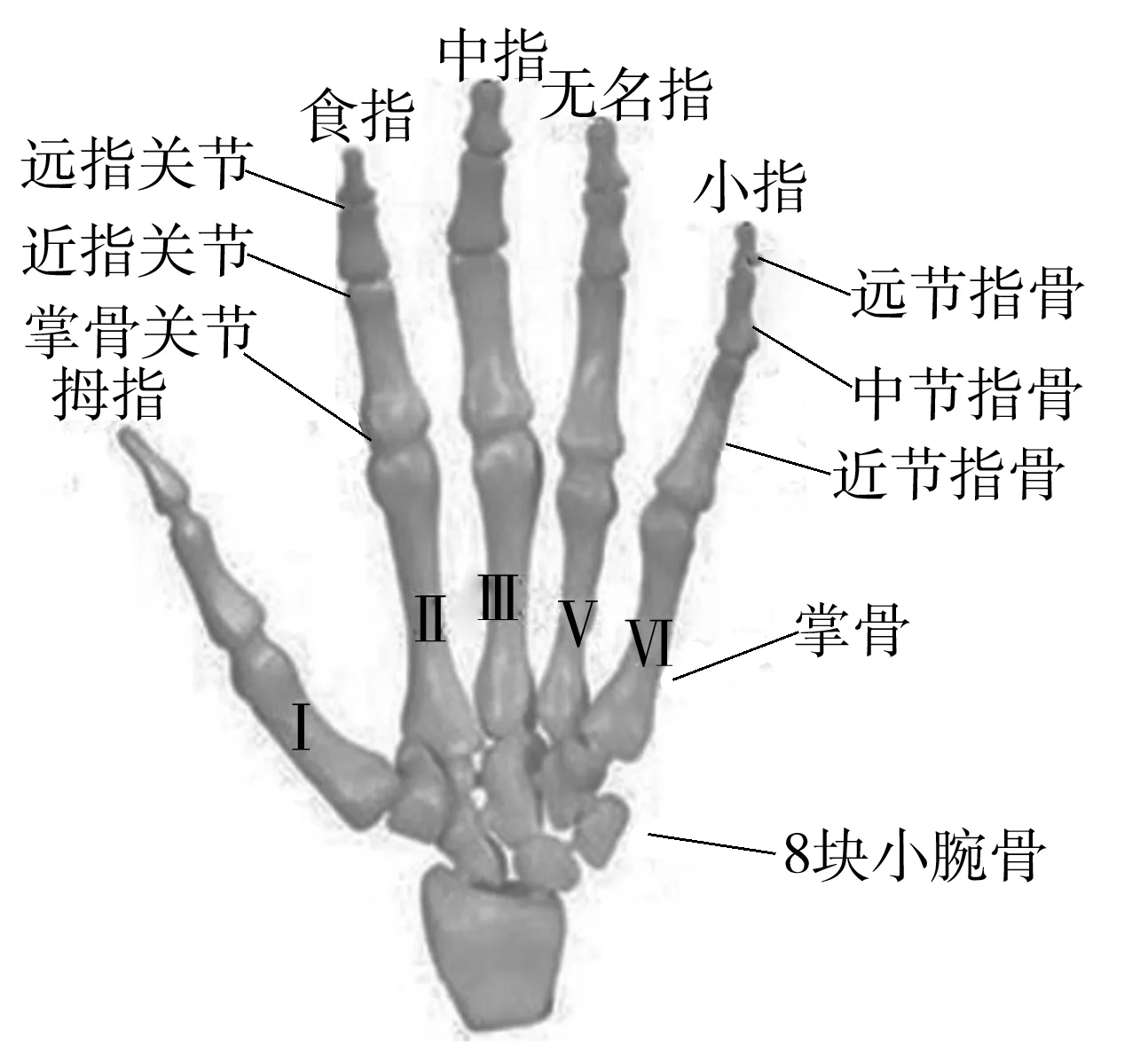
图1 人手骨骼
根据以上对于人手骨骼的分析,文中利用SolidWorks建立了一个仿人型肌电假手的模型.如图2所示,假手和人手一样,具有5只手指.假手手指的模型如图3所示,每只手指具有3节指骨(拇指只有2节指骨),指骨的长度根据一般成年男性手指进行设计,假手设计中近节指骨、中节指骨、远节指骨的长度分别为L1=37 mm、L2=34 mm、L3=27 mm.手指的关节采用弹性铰链机构,其中图3中关节A为掌骨关节,关节B为近指关节,关节C为远指关节,点P为指尖,θ1、θ2和θ3分别为关节A、B、C转过的角度.人手的掌骨部分设计为假手的手掌,内置4个独立的驱动器.考虑到关节的数目远多于驱动器的数目,手指的关节通过腱驱动耦合成复合的动作,图3中虚线为手指中腱驱动的绳索路径示意图,实心圆点为绳索与手指连接部位的示意.每个手指具有1个自由度,只需要1个独立的驱动器进行驱动.由于拇指在人手活动中的重要作用,假手中拇指的设计具有2个自由度,分别为弯曲/伸展和绕手掌的旋转.拇指的旋转动作能让假手在侧边捏取和强力或精确抓取的手势之间切换[14].因此,该假手具有仿生的特性,具有与人手相似的大小和结构,能够实现人手日常生活中大部分的抓取行为,在功能上与人手接近.
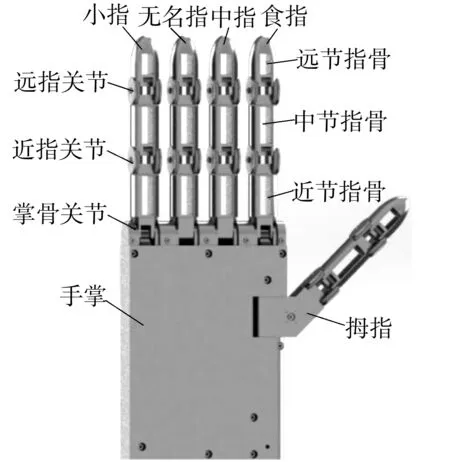
图2 假手模型
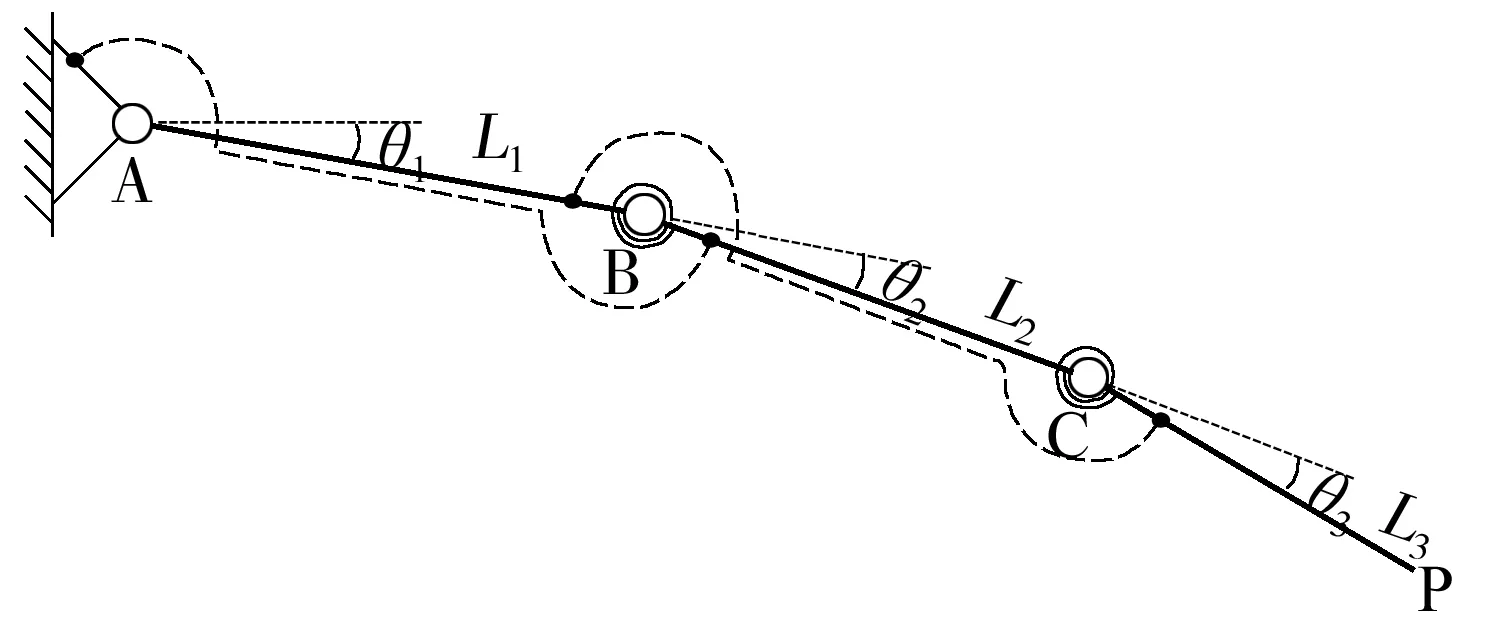
图3 假手手指模型
2 肌电假手的机构设计
2.1 手指的设计
假手的手指总长度为103 mm,如图4所示,共有3节指骨,即近节指骨、中节指骨和远节指骨.每节指骨内的中空结构可以达到减轻假手重量的目的.手指的关节采用弹性铰链,相邻的两节指骨之间通过2根等长的螺旋弹簧并排放置进行连接,分别嵌在指骨两端直径为2 mm的孔上.手指的开合运动采用腱驱动的传动方式,通过拉紧/放松贯穿手指的绳索来实现手指的弯曲/伸展动作.手指关节两侧的薄片通过螺钉固定在指骨前端的圆盘上,起到防止绳索滑出轨道的作用.
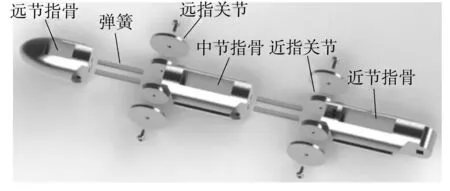
图4 手指爆炸图
2.1.1 手指的关节设计
假手的手指关节设计通过柔顺机构来实现.柔顺机构是利用构件自身的弹性变形来完成运动和力的传递与转换的新型机构[15].假手的关节采用柔顺机构中的弹性铰链,每个关节在指骨的结合部嵌入螺旋弹簧.弹簧的外径为2 mm,丝径为0.35 mm,有效长度为4 mm,最大弯曲角度为90°.如图5所示,弹簧在一定范围内进行弯曲,一个较小的弯曲长度便可以产生很大的弯曲角度,形成较大的位移,而且不会产生永久的变形和扭转现象.当弹簧在0°~90°的范围内做弯曲运动时,这种柔性弯曲的旋转中心是固定的[8].因此,在对机构进行分析时,如图3所示,可以近似地把机构等效为一个伪刚体模型,即具有一定扭转刚度的旋转中心固定的铰链.为了限制关节的自由度、防止手指的侧摆运动,2根弹簧并排安装.
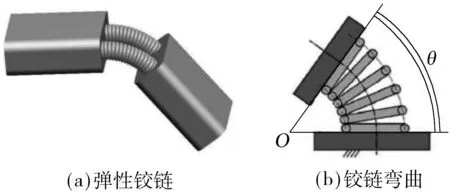
图5 弹性铰链弯曲示意图
关节中弹性铰链的使用具有重要的作用.首先,受弯曲的弹簧给手指的伸展提供一个返回的力,在没有外力作用的情况下手指可以自行伸直,简化了关节的驱动,关节只需一个正向的驱动就能保证手指完成抓握、捏取等基本动作.此外,弹性铰链相比传统的刚性铰链结构简单、安装方便.由于没有铰链间隙,弹性铰链结构可靠性高,几乎不存在磨损.同时,在负载过大或者受到较大冲击时,弹性铰链能起到缓冲作用,使机构的平稳性提高,对假手和用户都有保护作用.
2.1.2 手指的腱驱动设计
对于仿人型假手来说,自由度并不是越多越好.自由度越多,假手所需的驱动器就会越多,结构就越复杂,假手的重量和体积也会增加.在满足基本功能的前提下,假手的自由度应该尽可能地少[16].
对于单只手指来说,如果要使手指的灵活性达到最好,就需要4个自由度,即掌骨关节、近指关节和远指关节的弯曲/伸展自由度以及掌骨关节侧向摆动的自由度.而事实上,手指只需要1个自由度就可以完成抓握、捏取等基本的动作,即手指只需要1个驱动器来驱动弯曲,而侧向摆动的动作可以整合到手掌上.通过腱驱动的传动方式耦合手指各个关节之间的运动可以实现这个要求.
由于掌骨关节侧向摆动的动作整合到了手掌上,整个手指取消了相对于手掌左右摆动的自由度,因此手指只有1个自由度,即手指的弯曲/伸展.掌骨关节由驱动器经齿轮系直接进行驱动,近指关节和远指关节的运动通过腱驱动的传动方式进行耦合,跟随掌骨关节运动.根据人手的规律,掌骨关节、近指关节和远指关节的运动幅度都在90°左右,因此掌骨关节、近指关节和远指关节之间可以近似为1∶1 ∶1的传动比例.该设计能通过腱驱动实现驱动关节从某一点开始转过90°,从动关节平稳地同步转过所需角度.
腱驱动是通过拉动贯穿各节指骨的绳索来实现的,图6为手指中各个关节耦合运动所用绳索的路径示意图.近指关节跟随掌骨关节的耦合运动中,腱驱动的绳索贯穿整个近节指骨,两端分别绕过手掌和近节指骨前端的圆盘,最后固定在手掌和中节指骨上;同样,远指关节跟随近指关节的耦合运动中,腱驱动的绳索贯穿整个中节指骨,两端分别绕过近节指骨和中节指骨前端的圆盘,最后固定在近节指骨和远节指骨上.绳索在两端圆盘上的缠绕方向并不相同,在主动关节部分绳索绕在圆盘的上方,而在从动关节部分绳索则绕在圆盘下方.由公式(1)可得圆弧长度:
l=θr
(1)
其中,绕在圆盘上绳索增加或减少的长度l与手指关节旋转角度θ成正比.如图3所示,以近指关节B跟随掌骨关节A的耦合运动为例,当近节指骨绕掌骨关节A转动时,随着转动角度θ1的增加,绕在掌骨关节圆盘上的绳索成正比地增加长度l,由于绳索具有不可延展性,即绳索的总长度保持不变,且绳索在两端圆盘上的缠绕方向相反,因此绕在近节指骨圆盘上的绳索需要相应减少长度l,绳索便对中节指骨产生一个拉力,使中节指骨也随着绕近指关节B转过相应的角度θ2.同理可得远指关节C跟随近指关节B的耦合运动.因为各个指骨和手掌前端的圆盘直径均为d=10 mm,所以掌骨关节A、近指关节B、远指关节C之间耦合传动比例为
θ1∶θ2∶θ3= 1∶1∶1
(2)
若要设计成其他的传动比例,可以通过改变主从关节上圆盘的直径大小来实现.
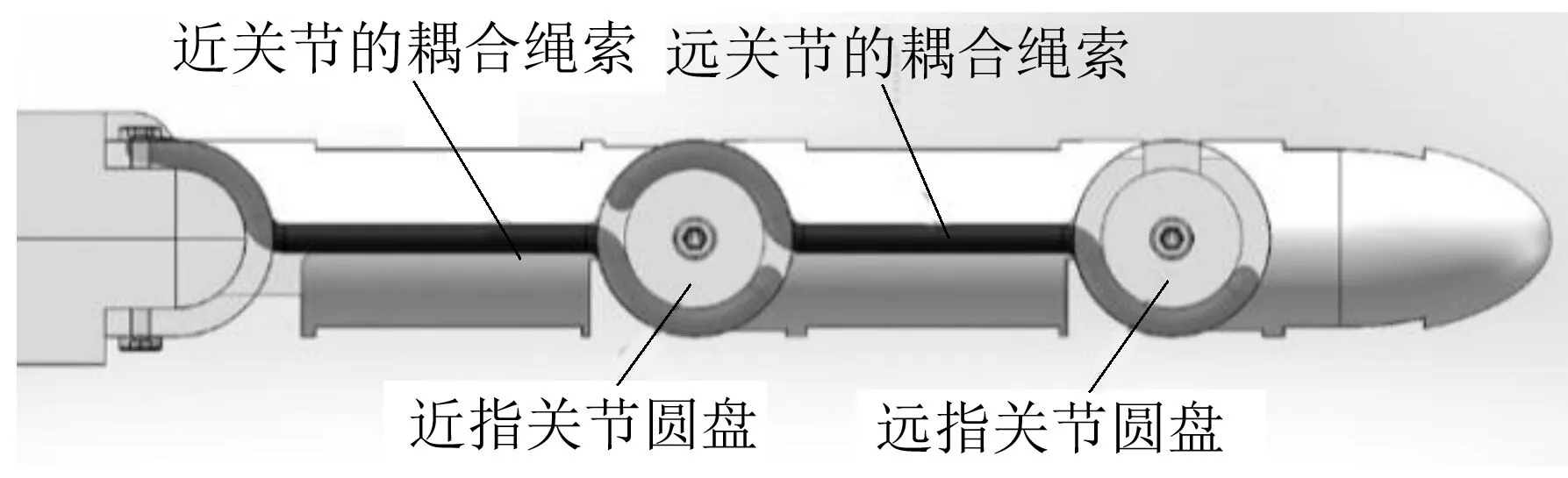
图6 绳索路径示意图
2.2 手掌的设计
肌电假手是一个高度集成化的系统,除了机械结构以外,还有传感器、控制模块、驱动器和电气系统等.文中设计的肌电假手所使用的驱动系统设计安装在手掌内.4个驱动器分别驱动5个手指共4个自由度,分别为拇指绕手掌的旋转、拇指的弯曲/伸展、食指的弯曲/伸展、其余三指的弯曲/伸展.其中拇指绕手掌的旋转、食指的弯曲/伸展、其余三指的弯曲/伸展由驱动器通过齿轮系驱动,拇指的弯曲/旋转由驱动器经过齿轮系和滑轮实现腱驱动.
假手的手掌具有集成度高、安装方便的特点,由手掌背、手掌盖、驱动系统和传动部分组成.如图7所示,驱动系统包含有4个驱动器,由两个电机架固定在手掌内.从左往右4个驱动器交错平行排列,分别驱动假手的4个自由度,依次是拇指的弯曲/伸展、3只手指(中指、无名指和小指)的弯曲/伸展、拇指绕手掌的旋转、食指的弯曲/伸展.食指弯曲/伸展的驱动中,传动系统由1对锥齿轮和1对圆柱直齿轮组成.锥齿轮使传动方向改变90°,齿数比为1∶1.圆柱直齿轮直接驱动近节指骨绕掌骨关节运动,从而带动整个食指的弯曲/伸展,齿数比为10∶26.3只手指(中指、无名指和小指)弯曲/伸展的驱动中,小指的传动系统与食指相同,中指和无名指通过1根传动杆来实现与小指的耦合运动,传动杆是固定在中指、无名指和小指的掌骨关节中,带动三指同时进行弯曲/伸展运动,传动比例为1∶1∶1.拇指绕手掌旋转的驱动中,传动系统由4个圆柱直齿轮组成,直接驱动腕掌关节的旋转,传动比为10∶26.拇指弯曲/伸展的驱动中,传动系统由1对圆柱直齿轮和1个滑轮组成.拇指的驱动腱固定在滑轮上,圆柱直齿轮带动滑轮旋转实现拇指的弯曲/伸展运动,圆柱直齿轮的齿数比为10∶26.由此,在手掌的驱动系统中,各个自由度的传动比例均为10∶26,相同的传动比例有利于未来对肌电假手的驱动控制.
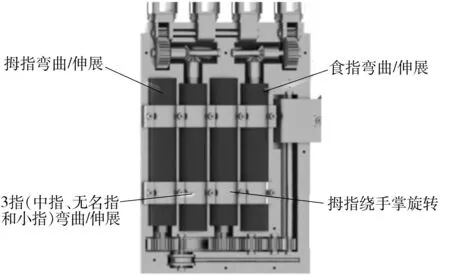
图7 手掌内部结构
3 肌电假手的运动分析
3.1 手指的运动学分析
由于肌电假手除拇指外的4只手指采用相同的结构设计和驱动方案,在对假手进行运动学分析时,以单个手指进行运动学分析.
如图8所示,建立手指的坐标系,并依次对每个关节定义本地的参考坐标系,掌骨关节、近指关节、远指关节之间的耦合传动比例为1∶1∶1.
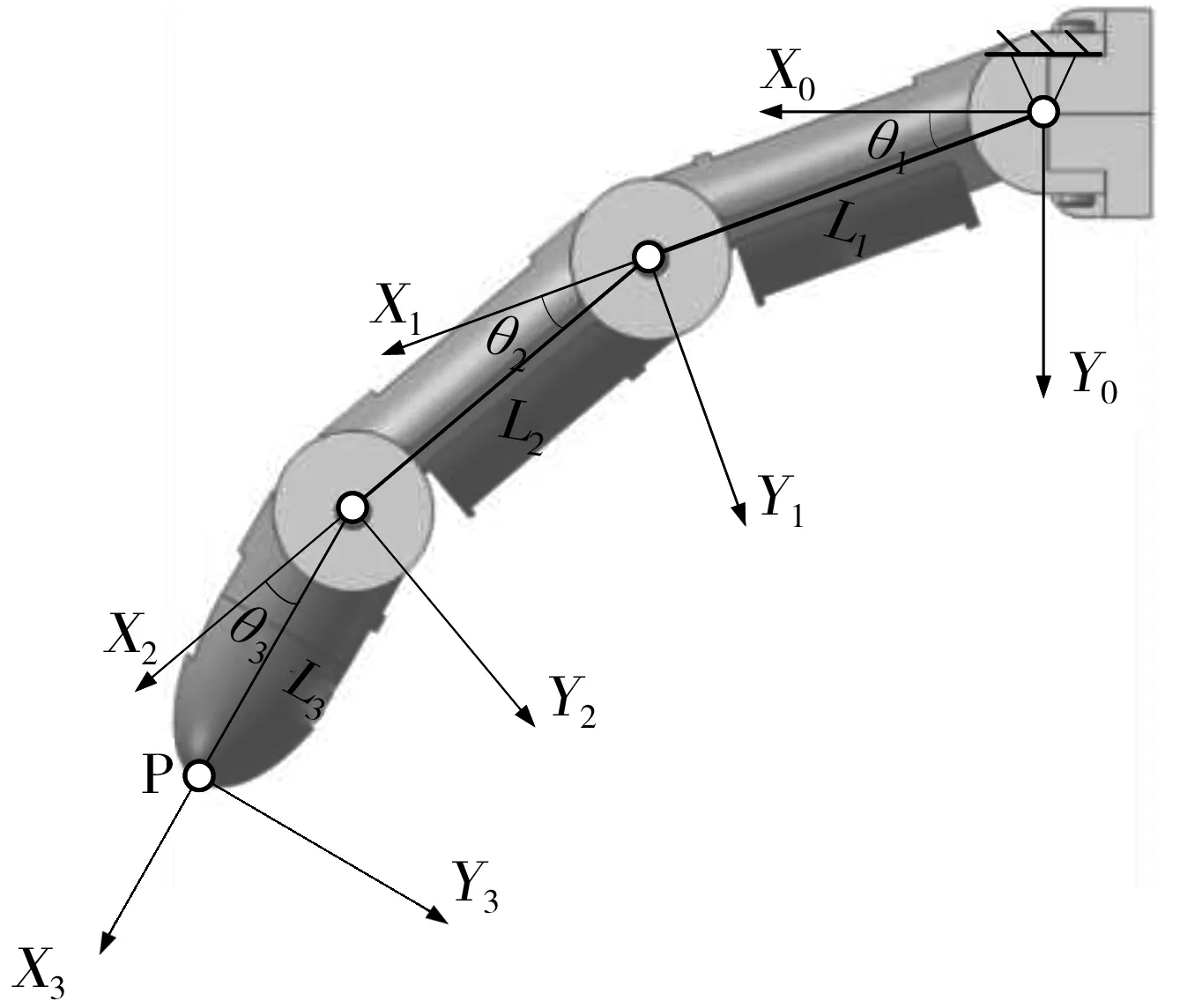
图8 手指运动分析
由于手指机构只有1个自由度,因此手指上一点相对于基点的坐标由θ1唯一确定,即其坐标分量x、y、z均为关于θ1的函数.以指尖上点P来分析,指尖上一点P的位置矢量为P=(xp,yp,zp,1)T,则有位置方程如下:
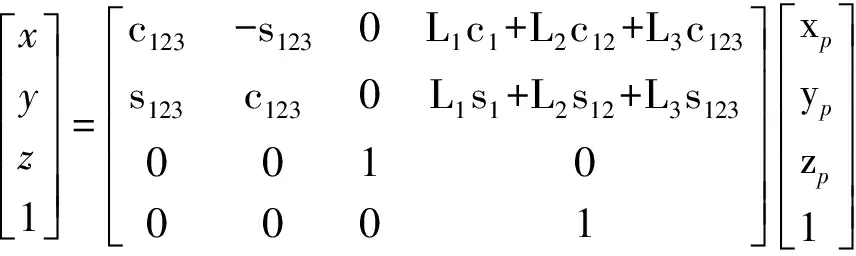
式中:c1表示cosθ1,s1表示sinθ1,而,c12=cos(θ1+θ2)=c1c2-s1s2,同样地有s12=sin(θ1+θ2)=c1s2+s1c2,如此类推.由于除拇指外其余4个手指是平面机构,可以忽略z方向上的位移.根据以上指尖点P的位置方程,可以求得指尖点P的运动轨迹,如图9所示.
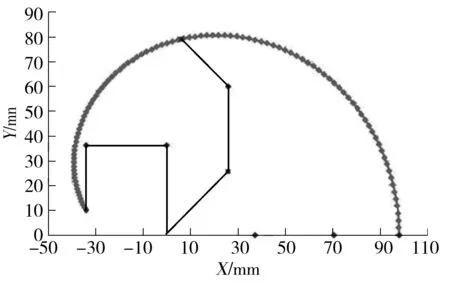
图9 手指指尖点P的运动轨迹
同样地,如图10所示,建立假手拇指的坐标系,依次对每个关节定义本地参考坐标系,L1x和L1z分别表示近指关节与掌骨关节在x轴和z轴上的距离,α为拇指的倾斜角度.由于近指关节、远指关节之间具有1∶1的耦合传动比例,可知θ2=θ3.

图10 拇指运动分析
拇指具有绕手掌旋转和弯曲/伸展两个自由度,拇指上一点相对于基点的坐标由θ1和θ2确定.以拇指的指尖点P进行分析,拇指的指尖上一点P的位置矢量为P=(xp,yp,zp,1)T,则有位置方程如下:

根据以上拇指指尖点P的位置方程,可以求得指尖点P的运动空间,如图11所示.
图11 拇指指尖点P的运动空间
3.2 假手的运动模拟
通过SolidWorks的模拟,该肌电假手能够成功做出8个经典的抓握手势,如图12所示.这些抓取动作包括了大部分人手的抓取行为,并且能够满足一般人的日常生活需要.这8个手势分别是:①圆柱抓取,用整个手抓取圆柱形的物体,例如抓饮料瓶子;②勾取手势,通过4只手指弯曲来提或拉物体,例如提公文包;③侧边捏取,拇指与食指侧边之间的捏取,例如拿钥匙或信用卡;④指向手势,食指伸展.其余四指做抓握的手势,例如按键盘或按钮;⑤放松手势,五指摊开的手势,例如拿一本书或盘子;⑥球形抓取,用整个手抓取球形的物体;⑦3只手指捏取,拇指、食指和中指之间的捏取动作,用来稳固地抓取较小的物体;⑧两指捏取,拇指和食指指尖之间的捏取,用来抓取更小的物件.
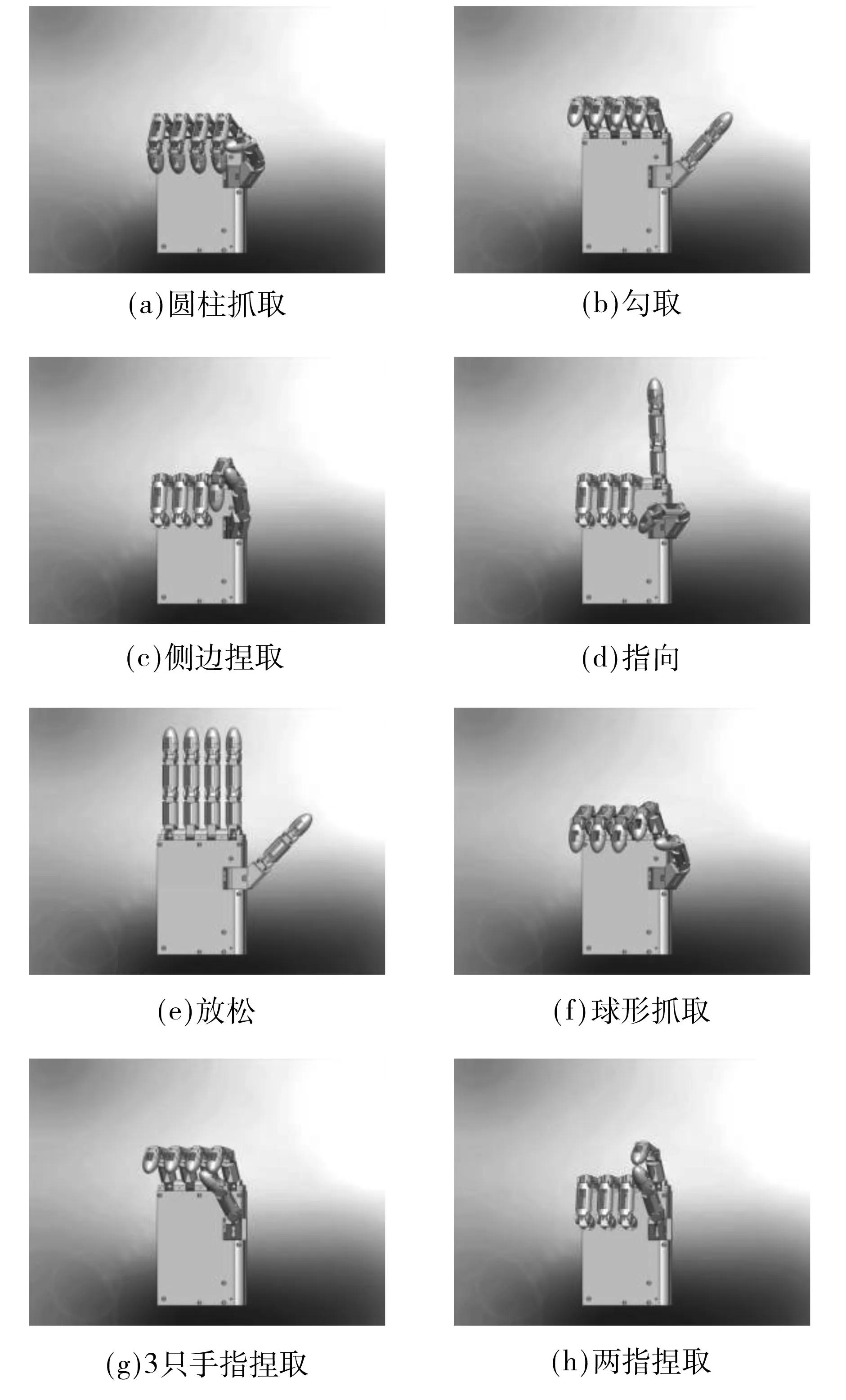
图12 8个抓握手势的模拟
如图13所示,通过SolidWorks的模拟,该肌电假手分别通过三指捏取、圆柱抓取、两指捏取、球形抓取4种手势,抓握直径为10、20、40、50 mm的圆柱和球体.可见该假手能够适应并稳定抓握各种不同大小形状的物体.
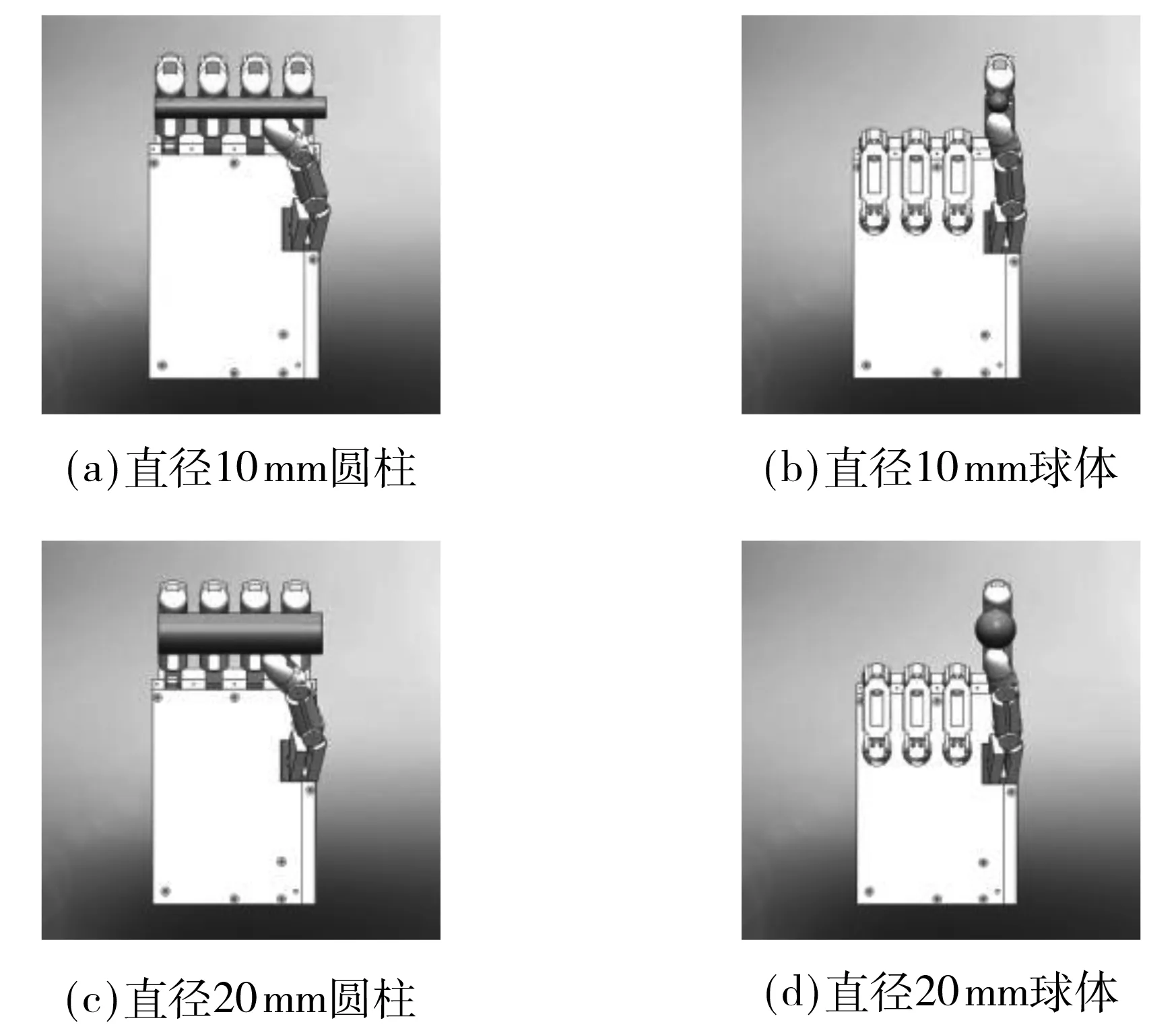
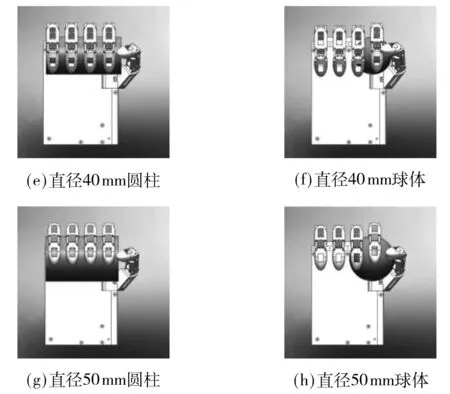
图13 不同尺寸圆柱和球体的抓握模拟
4 机械假手模型
文中设计的仿人型假手经加工装配后得到的假手模型如图14所示.该假手的形状和大小都与人手相似,而且能够实现日常生活中的抓握功能.
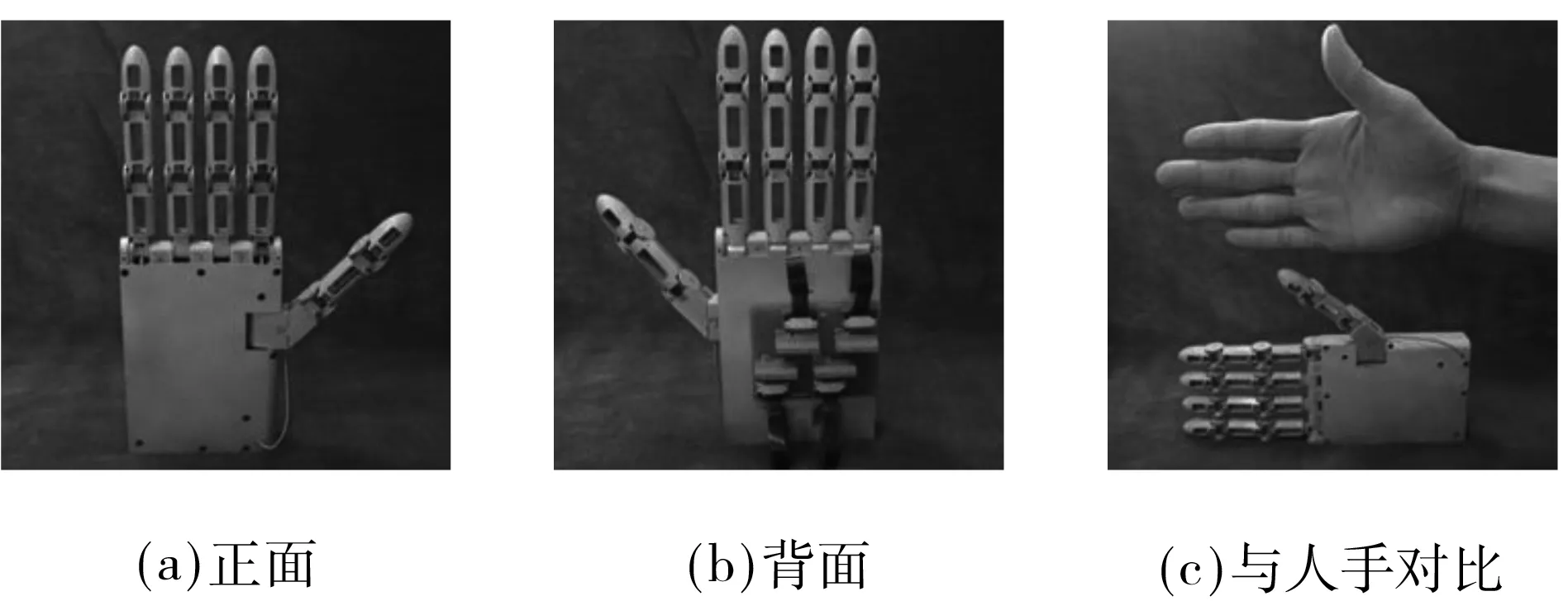
图14 仿人型肌电假手模型
图15中为假手的整体系统.假手的控制系统包括ACS运动控制公司的运动控制器、运动驱动器和配套的控制软件.肌电假手的电机采用Maxon motor公司的直流微型电机.首先建立计算机、运动控制器、运动驱动器和肌电假手之间的通讯,四者之间按实际要求接线并接通电源;然后通过软件依次进行通信配置、系统配置、电机参数配置和控制调试等设定;最后对电机的运动方式进行控制编程.图16为肌电假手抓握不同物体时的8个手势.
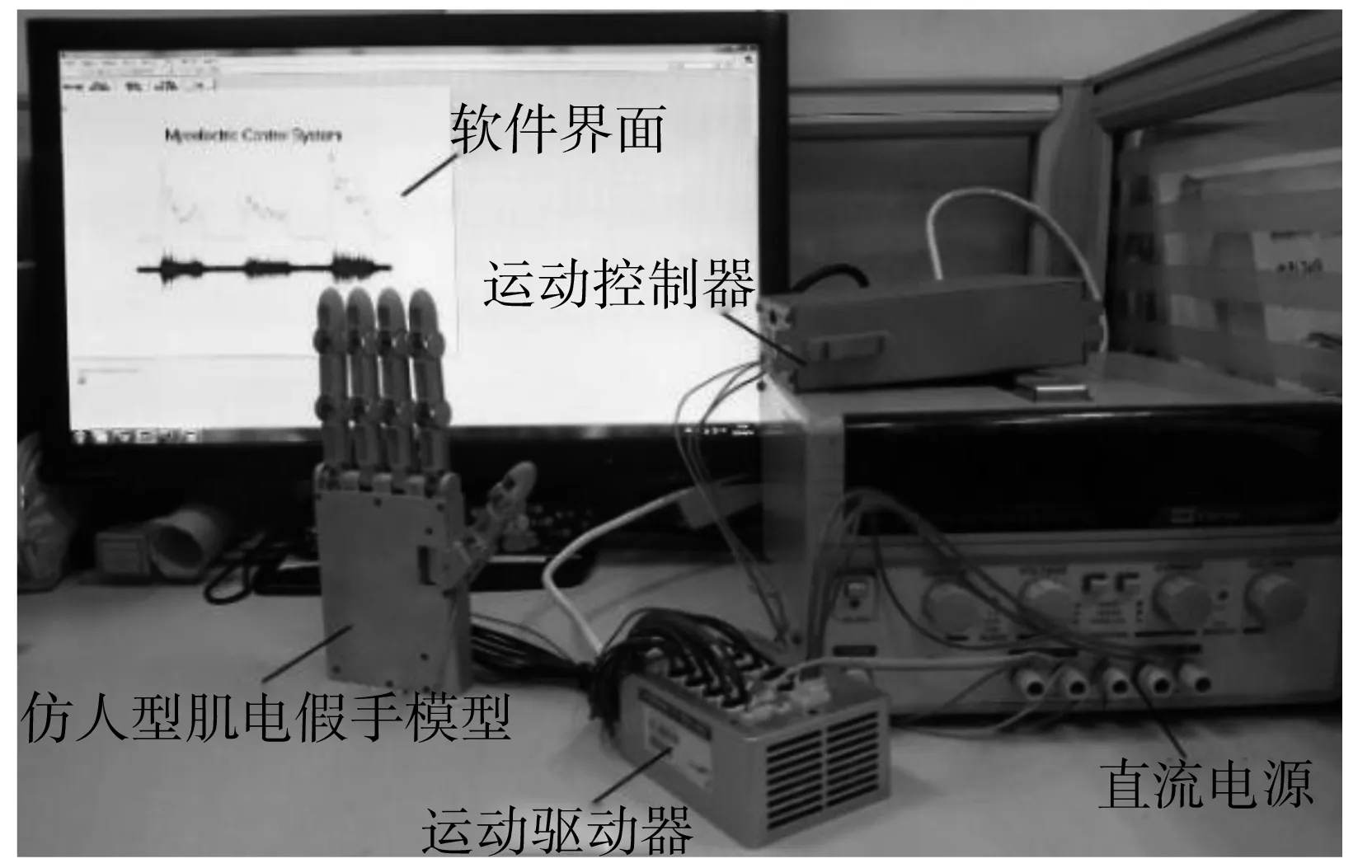
图15 肌电假手的整体系统
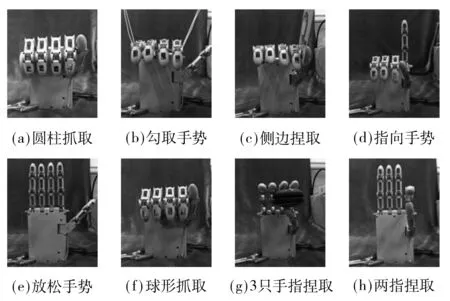
图16 肌电假手的8个手势
5 结语
文中提出了一种基于弹性铰链的仿人型肌电假手的设计,基于对人手骨骼结构的分析,建立起该肌电假手的基本架构.该假手具有与人手相类似的形状结构和大小,有5只手指,拇指和食指可以独立运动,中指、无名指和小指联立运动;手指基于弹性铰链设计,除拇指外,每个手指有3节指骨,指骨间通过螺旋弹簧连接,保证了手指活动的灵活性;手指各个关节的运动通过腱驱动实现耦合,当手指的近节指骨被驱动绕掌骨关节产生弯曲时,其中节指骨和远节指骨在耦合绳索的作用下分别绕各关节实现弯曲.此外,拇指在与手掌连接处还有1个拇指绕手掌转动的自由度.假手的4个驱动器安装在手掌内部,分别驱动拇指绕手掌的旋转、拇指的弯曲/伸展、食指的弯曲/伸展、其余三指的弯曲/伸展4个自由度.通过对假手手指的运动分析以及假手各种功能的模拟,该假手能够实现多种抓握手势,并能够抓取各种不同形状大小的物体,能完成日常生活中的基本抓握动作.在未来的工作中,将进一步改进该仿人型假手的结构及外观设计,使其从手指和手掌等各方面更加接近于人手,同时能实现更多的抓握和操作功能.
[1] HISHIKAWA D,YU W,YOKOI H,et al.EMG prosthetic hand controller discriminating ten motions sing real-time learn method [C]∥Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems.IEEE:Kyonggju,1999:1592- 1597.
[2] KONRAD P.The abc of emg:a practical introduction to kinesiological electromyography [M].Scottsdale,Arizona:Noraxon USA,Inc.,2005.
[3] OSKOEI M A,HU H.Myoelectric control systems-a survey [J].Biomedical Signal Processing and Contril,2007,2(4):275- 294.
[4] CONNOLLY C.Prosthetic hands from touch bionics [J].Industrial Robot:An International Journal,2008,35(4):290- 293.
[5] DALLEY S,WISTE T,WITHROW T,et al.Design of a multifunctional anthropomorphic prosthetic hand with extrinsic actuation [J].IEEE/ASME Transactions on Mechatronics,2009,14(6):699- 706.
[6] CIPRIANI C,CONTROZZI M,CARROZZA M.The smarthand transradial prosthesis [J].Journal of Neuroengineering and Rehabilitation,2011,8(1):29- 42.
[7] ZECCA M,MICERA S,CARROZZA M,et al.Control of multi-functional prosthetic hands by processing the electromyographic signal [J].Critical Reviews in Biomedical Engineering,2002,30(4/5/6):459- 485.
[8] LOTTI F,TIEZZI P,VASSURA G,et al.Development of ub hand 3:early results [C]∥Proceedings of IEEE International Conference on Robotics and Automation.Barcelona:[s.n.],2005:4488- 4493.
[9] HUANG H,JIANG L,LIU Y,et al.The mechanical design and experiments of hit/dlr prosthetic hand [C]∥Proceedings of 2006 IEEE International Conference on Robotics and Biomimetics.Kunming:IEEE,2006:896- 901.
[10] ZOLLO L,ROCCELLA S,GUGLIELMELLI E,et al.Biomechatronic design and control of an anthropomorphic artificial hand for prosthetic and robotic applications [J].IEEE/ASME Transactions on Mechatronics,2007,12(4):418- 429.
[11] HANS-MARTIN S,ULRICH L.Surgical anatomy of the hand [M].Stuttgart:Thieme,2004.
[12] WU Ying,HUANG T S.Hand modeling,analysis and recognition [J].IEEE Signal Processing Magazine,2001,18(3):51- 60.
[13] OUELLETTE E,MCAULIFFE J,CARNEIRO R.Partial-hand amputations:surgical principles [M]∥Atlas of Limb Prosthetics,Surgical,Prosthetic,and Rehabilitation Principles.St Louis:Mosby-Year Book,1992:199- 216.
[14] JOSEPH T B,JACOB S,AARON M D,et al.The mechanical design and performance specifications of anthropomorphic prosthetic hands:a review [J].Journal of Rehabilitation Research and Development,2013,50(5):599- 618.
[15] 王雯静,余跃庆,王华伟.柔顺机构国内外研究现状分析 [J].机械设计,2007,24(6):1- 4. WANG Wen-jing,YU Yue-qing,WANG Hua-wei.Analysis on the research status of compliant mechanism at home and abroad [J].Journal of Machine Design,2007,24(6):1- 4.
[16] MASSA B,ROCCELLA S,CARROZZA M C,et al.Design and development of an underactuated prosthetic hand [C]∥Proceedings of International Conference on Robotics and Automation.Washington:IEEE,2002:3374- 3379.
Design of an Anthropomorphic Prosthetic Hand with Elastic Joints
WANGNian-fengLAOKun-yiZHANGXian-min
(School of Mechanical and Automotive Engineering,South China University of Technology, Guangzhou 510640,Guangdong,China)
In the amputee rehabilitation,the anthropomorphic prosthetic hand of light weight,small size and most of the grasping and operating functions of human hands is needed.In this paper,by analyzing the skeletons and functions of human hands,a design of the anthropomorphic prosthetic hand is proposed.The prosthetic hand has five fingers and four degrees of freedom (DOFs),and is driven by four independent actuators.The joints of each finger are designed based on elastic joints,and the adjacent phalanxes are connected by using helical springs.Except for the thumb,each finger is of one DOF,and the movements among the joints are realized by using tendons to couple the joints.The compact drive system is settled in the palm to control the fingers.Through the analysis of the finger workspace and the simulation of the prosthetic hand,it is proved that the proposed prosthetic hand can execute most gestures and grasping tasks in the activities of daily life.
anthropomorphic prosthetic hand;elastic joint;myoelectric control
2015- 12- 22
国家自然科学基金资助项目(51205134,51575187,91223201);广州市产学研协同创新重大专项(2014Y2-00217);广东省自然科学基金资助项目(S2013030013355);黄埔区重大专项(20150000661);华南理工大学中央高校基本科研业务费专项资金资助项目(2015ZZ007) Foundation items: Supported by the National Natural Science Foundation of China(51205134,51575187,91223201) and the Natural Science Foundation of Guangdong Province(S2013030013355)
王念峰(1978-),男,教授,博士生导师,主要从事结构优化及机器人技术研究.E-mail:menfwang@scut.edu.cn
1000- 565X(2016)10- 0015- 07
TH 122
10.3969/j.issn.1000-565X.2016.10.003