基于禁忌搜索优化的直线进给系统矢量控制
2016-12-06施昕昕
林 健,刘 坤,施昕昕,刘 娣
(南京工程学院 自动化学院 ,南京 211167)
基于禁忌搜索优化的直线进给系统矢量控制
林 健,刘 坤,施昕昕,刘 娣
(南京工程学院 自动化学院 ,南京 211167)
数控机床的直线进给矢量控制系统中包含多个PID调节器,其控制参数直接影响系统性能。而直线进给系统是一个复杂的非线性时变系统,为了优化PID调节器控制参数,文章提出了改进的禁忌优化算法(Tabu),并将其应用于直线进给系统。在分析现有禁忌算法基础上,对Tabu算法的邻域范围、Tabu表和算法终止条件进行了改进,以直线进给系统的跟踪性能指标为目标函数, 应用该算法对直线进给矢量控制系统各调节器的PID参数进行优化,并进行了实验验证。结果表明,应用文中方法优化控制器参数后,与传统PID控制相比,直线进给系统在负载改变时转速波动和位置跟踪误差显著减小,提高了直线进给系统的稳态和动态性能。
直线进给系统;禁忌搜索;矢量控制;PID参数优化
0 引言
在高性能数控机床中,除了要有性能优良的高速主轴单元外,还需要有刚度高,动态响应迅速的快速进给系统。传统的“旋转伺服电动机+滚珠丝杠”传动方式所能达到的最大速度与加速度有限,远远不能满足生产的需求。直线电动机驱动的进给系统取消了从电动机到工作台之间的一切中间传动环节,其速度可以达到滚轴丝杆副的30倍,加速度可达滚轴丝杆副的10倍,且频率响应高,因此被越来越多地应用于高速精密机床中。但直线进给系统是高刚度、高加速度系统,“零传动”使得在工作过程中各种自身和外界扰动都直接作用在直线电动机上,且直线电动机由于其独特的结构产生端部效应,引起推力波动,这些特点使得其控制难度增加[1-3]。矢量控制方案是目前直线进给控制系统的主要控制方式之一, 其控制效果的好坏与各调节器PID参数的配置密切相关。工程上根据实验和经验整定PID参数的方法很多,然而都存在参数整定困难、整定结果性能不高等问题。韩京清设计一种跟踪微分器来实现系统的无超调控制,但参数条件过于复杂[4]。黄科元等采用输出微分负反馈来消除超调,然而输出微分会引入噪声,影响系统性能[5]。直线进给系统是一典型的非线性多变量耦合系统,端部效应、负载阻力扰动、摩擦力扰动、推力扰动、磁链谐波扰动等多种扰动对系统的性能都会造成明显的影响,对于这样一个非线性、时变、大延时的复杂系统,其PID 参数整定实质是一个优化问题,即在可行域内迅速找到全局最优解,现在越来越多地应用到智能优化方法,包括模糊控制、神经网络、粒子群算法、遗传算法等,这些方法不依赖于系统数学模型,将这些智能算法用于整定PID 调节器,可有效提高控制器的鲁棒性和控制精度。蓝益鹏将模糊PID 控制器应用到直线电机悬浮子系统位移环中,以满足悬浮系统控制高精度的要求,然而模糊控制中模糊规则的设计完全依赖于经验[6];韩明文用RBF神经网络整定PID来控制直线电机,在一定程度上改进了传统PID 控制性能,但神经网络结构复杂,控制难度大[7];盘真保采用遗传算法对直线电机二自由度PID 控制器的参数进行优化,解决传统控制器在设定值跟随性能和干扰抑制特性不能达到共优的问题,但遗传算法迭代次数多、计算效率低[8]。禁忌算法(Tabu)作为一种高效启发式算法受到越来越多的关注[9-11], 具有收敛速度快、搜索精 度高的优点,本文的主要工作有三个方面:①首次将Tabu算法应用于直线电机矢量控制系统中PID 参数的整定;②为了提高Tabu算法的收敛精度与搜索速度,对算法的邻域范围、Tabu表和算法终止条件进行了改进;③在自制控制器的实验平台上进行了实验,得到Tabu优化后的控制器在不同扰动下的速度跟踪曲线以及阶跃输入下的位置跟踪曲线,并与传统PI控制器跟随性能进行比较,验证了算法的有效性。
1 直线进给系统的矢量控制
将正弦三相对称交流电通入直线电动机动子绕组中后,如果不考虑纵向端部效应,会产生沿展开方向呈正弦分布的气隙磁场。当时间改变,气隙磁场将沿直线运动,称之为行波磁场。行波磁场与永磁体产生的励磁磁场交互作用,形成电磁推力,推动动子作直线运动,其方向与行波磁场运动的方向相反。因为是永磁体,故磁动势可看做常量。
矢量控制基本思想是在三相交流电动机上设法模拟直流电动机转矩控制的规律,为此,建立磁场定向坐标(d-q轴模型),将电流矢量分解成产生磁通的励磁电流分量id和产生转矩的转矩电流分量iq,并使两分量互相垂直,彼此解耦,然后分别进行调节。由此得到d-q轴磁链方程及电压方程为:
(1)

(2)
式中:ψd、ψq为d、q轴动子磁链, ψf为永磁磁链;ud、uq为d、q轴动子电压,id、iq分别为d、q轴动子电流,ω为直线电动机对应的电角速度,Ld、Lq为d、q轴动子电感;R为动子电阻。
从上述方程可推得电磁推力方程:
(3)
式中:Fe为电磁推力,τ为极距。可以看出,式(3)前一项是永磁直线电动机励磁绕组的次级磁动势和初级电枢反应磁动势相互作用产生,后一项则由磁阻变化产生。
矢量控制的目标要求定子永磁体磁场与动子电流矢量在空间上正交,同时控制策略上令电流励磁分量id=0,此时电磁推力Fe与iq将成正比,设直线电动机端部效应产生的等效阻力为Fd,则直线电动机的运动方程为:
(4)
式中:Kf为电磁推力系数; M为动子与负载总质量;B为粘滞摩擦系数;v为动子速度;F1为负载阻力;Fd为等效阻力。
进一步得到直线电动机的传递函数为:
(5)
2 禁忌搜索算法的改进
禁忌搜索法是一种随机搜索法,主要思想是先对每个解定义一个解的邻域,从一个初始解出发,按照特定搜索方向(禁忌表)移动搜索,不断迭代逐渐逼近最优解。为了提高搜索效率,本文对禁忌算法的邻域范围、Tabu 表和算法终止条件等做了改进,简述如下。
2.1 邻域范围的动态调整
搜索初始阶段,为了获得尽可能多的周围信息,邻域范围应设定的大一些,但这一邻域若固定不变则影响后期搜索效率。本文在开始阶段针对每个邻域限定搜索次数,一旦超过则进入下一邻域搜索,后期接近最优解时减小搜索范围。
2.2 Tabu表的结构改造
一般Tabu 表存入某一步长L,凡是步长为L的移动全部被禁止, 这样禁止的移动范围有可能包含了一些对寻找最优解有益的移动,因此本文Tabu表不仅存入步长L,同时存入对应于这一步长的状态点坐标,这样做禁止的仅仅是围绕某个状态点周围的邻域范围,禁止的范围缩小了且更精确。
2.3 终止条件的改进
一般优化算法终止条件有两种: ①预先设定一个最大迭代次数,但弊端是可能还未达到最优解就已经达到最大迭代次数。②预设一个最大误差,但问题是优化前最优解并不知道。本文设计了一种动态终止条件:设定一个适当的迭代次数周期,将本次迭代周期内产生的最优值与上一次迭代周期的最优值相比较,如有改善则继续,否则就终止。这一方法克服了单一判据的不足。
3 基于Tabu搜索的PID参数优化
本文的直线进给矢量控制系统应用在数控机床上,具有典型的三环结构,由外到内分别是位置环、速度环和电流环,按照工程经验,位置环多采用P控制,速度环采用PID控制器,电流环采用PI控制,系统结构如图1所示。

图1 直线进给矢量控制系统框图
直线进给矢量控制系统中需要优化的位置、速度和电流调节器PID参数(比例系数KP, 积分时间常数TI和微分时间常数TD)一共6个,首先需要对这些参数分别进行二进制编码, 再组合成一个二进制码串,构成Tabu搜索算法的初始解。
为了提高优化效率,需要对待优化的PID参数范围进行初步估算,本文使用的估算方法不依赖数学模型,而是利用ZN工程整定法获得基准PID参数,再向两边延拓。PID参数的搜索范围由下列不等式确定:

(6)

评价PID 控制器性能好坏的常用积分性能指标有误差绝对值积分(IAE)、误差平方积分(ISE)和时间乘以误差平方积分(ITSE)。由于IAE和ISE没有考虑时间因素,在得到相对较小超调的同时,需要较长的调节时间。ITSE 虽然考虑了时间因素,但其公式复杂并且费时。为此综合直线进给系统的控制性能指标,提出如下简单有效的适应度函数:
(7)
式中,权重系数w∈[0,1],σ为超调量,ei为输出误差,tr为上升时间,ts为调节时间。搜索适应度函数f的最小值可保证获得要求的最优性能指标,从而得到对应的一组最优控制参数KP、TI和TD。如果在迭代次数周期内适应度函数达到最小(不再改善),算法终止。基于Tabu搜索的PID参数优化流程如图2所示。具体步骤如下:
(1)初步设定算法参数,包括迭代周期、邻域范围、Tabu表长度等,Tabu表置空;
(2)在种群中任选某个个体作为当前解x,以当前解为起点,随机产生若干邻域解,将对应的PID参数用于直线进给系统,计算其适应度;
(3)判断当前状态点是否满足禁忌要求,不满足则跳转到(5);
(4)判断当前状态点是否满足释放条件,不满足跳转到(2);
(5)对当前解x邻域的若干个邻域解对应的PID参数计算其适应度,取局部最优解;
(6)比较局部最优解与全局最优解来更新全局最优解;
(7)若没有超过迭代周期或适应度有改善,则继续下一次迭代,否则结束。
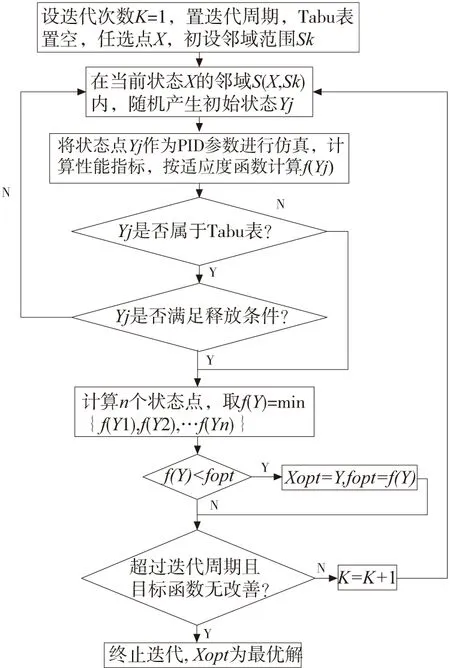
图2 基于Tabu搜索的PID参数优化流程
4 系统实验测试
为了验证上述算法的优化效果, 本文以数控永磁直线进给矢量控制系统为对象,对基于传统PID和基于Tabu优化PID的直线进给系统进行实验对比研究。直线电机实验平台采用美国Kollmorgen公司的IC22-050A2P1系列组件,包括直线导轨(REXROTL)、动子(IC22-050A2P1)、磁钢(MC050-0512)、驱动器(CB10560-000000)等。位置测量选择了德国HEIDEHAIN公司的LIDA485光栅尺,精度等级为±5μm。组装成型后的整机外形长度约为2000mm,净行程约为1800mm。原系统有自己的控制器,为了验证本文的优化控制策略,通过改变原有控制器中的参数设置,断开驱动器内部的闭环回路,接入自己设计的以DSP为核心的控制器,并经RS-232C接口向驱动器下发控制指令,驱动器中实际参数反馈值由控制器上传给上位计算机进行优化算法的分析与计算,得到相应的控制指令。直线进给实验平台如图3所示,包括直线电机、伺服控制器、直线光栅、垂直与水平加载装置等。上位机监控采用在线调试仿真软件─MOTIONLINK。该软件与伺服控制器之间通过RS-232C串口通信连接,并设计有相应的参数输入、输出结果数据及图形显示界面。
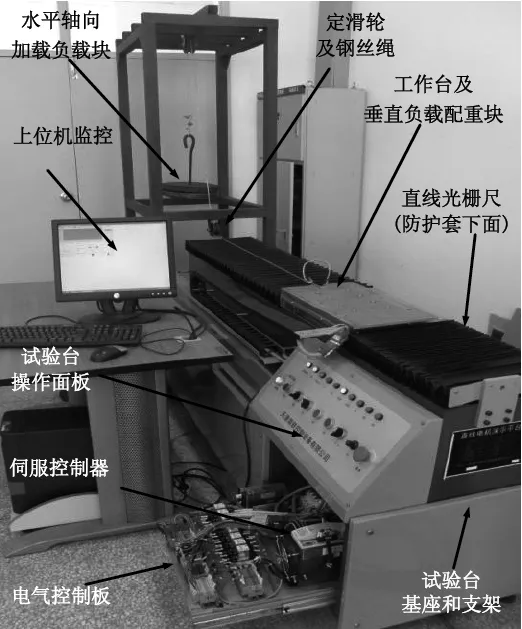
图3 直线进给系统实验平台
直线电动机参数如下:动子质量M=6.9kg, 极距τ=32mm,粘滞摩擦系数B=0.2N·s/m,电磁推力系数kf=63N/A, 额定推力Fn=548N,额定电流In=8.7A。
应用Tabu算法对位置、速度和电流调节器的PID参数进行优化。适应度函数中w的取值是关键,主要根据系统对性能指标的要求来决定,若系统对动态响应速度要求高,则w值宜取小一点,如系统要求更小的超调和误差,则w可以取大一点。本文的直线进给系统对跟踪精度和超调量要求较高,因此加权系数w取为0.7,周期迭代次数设为100。适应度函数经过若干次迭代周期后如不再改善就得到最优PID参数,从而应用于直线进给系统。
在直线进给系统运行过程中,突然施加350N扰动力,得到传统PID和Tabu优化PID控制系统的速度跟踪曲线,将二者放在一起比较如图4所示。图5则是连续施加300sin(2πt) (N)正弦负载扰动后的速度跟踪曲线。由图可见,传统PID控制不仅超调量大,负载干扰下转速波动显著,而经过Tabu 搜索算法优化后的PID控制系统,超调量小,转速波动明显改善,显示其对抗外部干扰能力强,稳态精度和动态响应都高于传统的PID控制器。图6为输入幅值为1.2 mm 的位置阶跃信号指令,传统PID和Tabu优化PID控制系统的位置跟踪曲线,可明显看出经Tabu优化PID的直线进给系统有更高的位置跟踪精度。
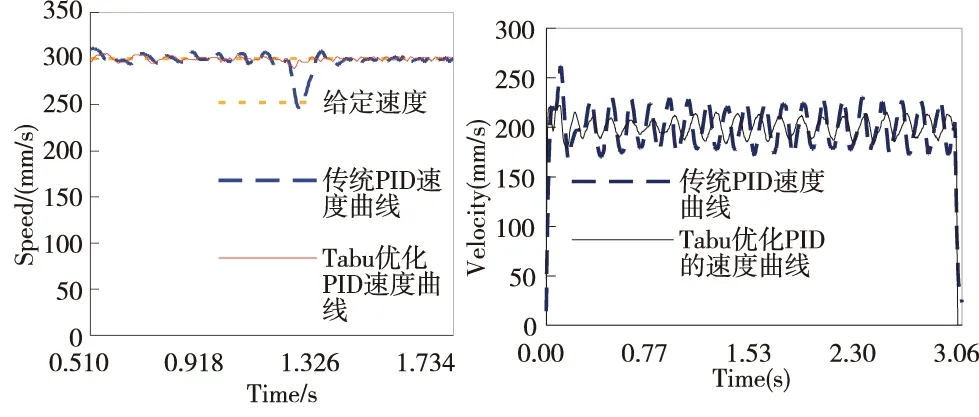
图4 突加负载扰动后的速度跟踪曲线图5 连续正弦干扰下的速度跟踪曲线
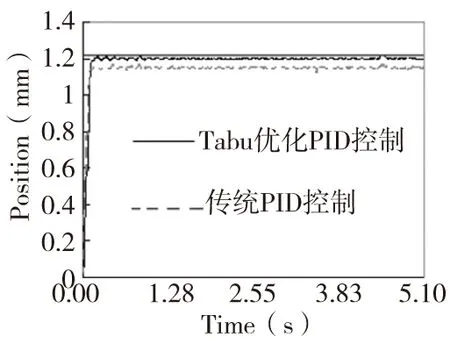
图6 位置跟踪曲线
5 结束语
直线进给矢量控制系统中各调节器PID参数的整定直接影响控制性能,工程上多采用实验与经验相结合的整定方法,本文采用Tabu搜索法对PID参数进行优化。为提高Tabu搜索的效率和精度,对邻域搜索范围、Tabu表规则、算法终止条件等算法要素进行了改进,并将Tabu搜索优化后的PID参数应用于直线进给矢量控制系统,实验结果表明, 相比于传统PID控制器,Tabu 优化的PID控制器,超调量、位置跟踪精度等性能指标提高,转速抗负载干扰的能力明显增强。
[1] 刘春芳,杜昭童. 数控机床永磁同步直线伺服系统免疫控制[J]. 沈阳工业大学学报,2015,37(1):1-5.
[2] 王善华,杨龙,王保升.基于SVPWM的永磁直线同步电机直接推力控制[J].组合机床与自动化加工技术,2015(6):93-95.
[3] Youn S W, Lee J J, Yoon H S, et al. A new cogging-free permanent-magnet linear motor[J]. IEEE Transactions on Magnetics, 2008,44(7): 1785-1790.
[4] 韩京清. 自抗扰控制技术—估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008.
[5] 黄科元, 周滔滔, 黄守道, 等. 永磁伺服系统基于微分自适应补偿的快速无超调控制策略[J]. 电工技术学报, 2014, 29(9): 137-144.
[6] 蓝益鹏,邱超.磁悬浮永磁直线电动机悬浮系统模糊PID控制器的设计[J].机床与液压,2013,41(7):94-96.
[7] 韩明文,刘军.永磁同步直线电动机径向基神经网络PID控制[J]. 微特电机,2012,40(6):62-64.
[8] 盘真保,董菲,赵吉文,等. 基于遗传二自由度的永磁同步直线电机PID控制参数优化研究[J]. 电气工程学报,2015,10(8):50-55.
[9] Dr’eo J,P’etrowski A,Taillard E.Metaheuristics for hard optimization [R].Germany:Springer-Verlag,2006.
[10] 姚静,方彦军,陈广.遗传和禁忌搜索混合算法在机组负荷分配中的应用[J].中国电机工程学报,2010,30(26):95-100.
[11] 陈亮,傅闯,李兴源.基于禁忌搜索算法的直流融冰计划优化决策 [J].电网技术,2015,39 (6):1637-1642.
(编辑 李秀敏)
Vector Control of Linear Feed System Based on Tabu Algorithm Optimization
LIN Jian,LIU Kun,SHI Xin-xin,LIU Di
(School of Automation,Nanjing Institute of Technology,Nanjing 211167,China)
Linear feed vector control system of numerical control machine contains multiple PID controller whose control parameters directly affect system performance. Linear feed system is a complex nonlinear time-varying system,an improved Tabu optimization algorithm (Tabu) is presented and applied in the linear feed system to optimize PID regulator control parameters ,Based on the analysis of the existing Tabu search algorithm (Tabu), the neighboring regions, Tabu table and algorithms termination condition is improved. The linear feed system tracking performance indicators are taken as the objective function, all regulator PID parameters of linear feed vector control system are optimized based on the improved Tabu search algorithm, the experiment is carried out . The results show that , compared with conventional PID control, the optimized controller makes the motor speed fluctuation and position tracking error reduce significantly when the load changes,and steady-state and dynamic performance of the linear feed system are improved.
linear feed system;Tabu search;vector control;PID parameters optimization
1001-2265(2016)11-0080-04
10.13462/j.cnki.mmtamt.2016.11.022
2015-12-07;
2016-01-06
国家自然科学基金项目(61503180);江苏省自然科学基金项目(BK20130744);江苏省高校自然科学研究项目(13KJB120003)
林健(1971—),男,南京人,南京工程学院教授,研究方向为数控机床的伺服控制,(E-mail)zdhxlj@njit.edu.cn。
TH166;TG659
A
