一种新型高铁接触网绝缘子冲洗机构优化及模态分析
2016-11-16王国志
邓 斌,郑 涛,王国志,秦 萍
(西南交通大学机械工程学院,四川成都610031)
一种新型高铁接触网绝缘子冲洗机构优化及模态分析
邓 斌,郑 涛,王国志,秦 萍
(西南交通大学机械工程学院,四川成都610031)
运用ANSYS Workbench 对一种新型绝缘子冲洗机构的伸缩臂进行静力学分析,并利用Design Exploration实现了以伸缩臂重量极小化为目标的截面参数优化。在满足负载要求的前提下,伸缩臂整体质量减少22.1%(17.9 kg)。对处于工作状态的伸缩机构进行模态分析,研究优化后机构在该状态下的动态特性,结果表明:优化后机构在该状态下的动态特性良好,优化结果可行。
冲洗机构 ANSYS Workbench 优化设计 模态分析
0 引言
绝缘子污闪已被公认是引发高铁电气化系统故障的最重要因素。绝缘子污闪放电的流程如图1所示[1]。

图1 绝缘子闪络流程图
目前绝缘子维护方式主要有:定期清扫方式;检测更换方式;种类替换方式以及水冲洗方式[2]。
水冲洗技术因具有高效、省力、成本低的特点,在绝缘子维护领域得到非常广泛的应用,是预防绝缘子发生污闪现象的有效措施。国外绝缘子水冲洗技术发展较早,水冲洗设备种类齐全。国外很多大型变电所采用固定水冲洗设备对绝缘子进行维护,这种冲洗方式作业时耗水量大、设备的成本高[3];日本Kyushu电子电力公司和安川电子公司共同研制出一种带电水冲洗作业机器人,该机器人通过伸缩机构,可将喷嘴直接对准绝缘子进行冲洗作业,但该机器人并不能完全自动化,还需人工完成切割和连接户外架空配电线路等工作[4];意大利Pisa University开发了通过直升机安放绝缘子水冲洗机器人的方式,但该方式成本高昂,技术难度大,操作困难[5]。
我国水冲洗技术虽然起步较晚,但是发展速度快。目前国内专用于绝缘子冲洗的设备有电力专用高空作业综合水冲洗车、KJ系列绝缘子带电水冲车以及便携式小水量冲洗设备等。其中轨道牵引式水冲洗车由于蓄水量足,操作方便,冲洗效率高、效果好而广泛应用在电气化铁路接触网绝缘子维护工作中[6]。
不足之处是既有线铁路和高铁线路存在一定的区别,使得目前国内已有的牵引式绝缘子水冲洗车无法直接用于高铁接触网绝缘子维护,因此西南交通大学新型驱动中心研制出一种专用于高铁接触网绝缘子维护的牵引式水冲洗车,设备简图如图2所示。
设备利用液压系统控制冲洗机构,实时调整冲洗距离和冲洗角度,大大提升了冲洗效率和效果。
1 冲洗机构简介

1-喷枪;2-摆动液压缸1;3-摆动液压缸2;4-伸缩臂;5-液压缸2;6-基本臂;7-液压缸1;8-回转盘图3 冲洗机构简图
冲洗机构是该设备及其关键的部件,其简图如图3所示[7]。
冲洗机构在液压动力的作用下可完成收缩、伸展、旋转以及摆动四个动作,充分保证冲洗作业要求。冲洗机构的工作简图如图4所示。

图4 冲洗机构工作简图
其中,o为回转机构中心;Lob表示机构回转中心o距顶部绝缘子b的距离,是冲洗的最长距离;Lof表示机构回转中心o距底部绝缘子f的距离。
调节伸缩臂和基本臂的长度和角度,可大幅度增长冲洗距离。
2 伸缩臂截面优化
冲洗机构依靠伸缩臂改变冲洗距离,传统伸缩臂设计方式通常依据经验选取较大的安全系数,这种设计方式虽然保证了臂架的力学性能,但却降低了材料的使用效能。利用SolidWorks和ANSYS Workbench优化设计出伸缩臂截面参数,优化过程如图5所示。

图5 伸缩臂优化流程图
其中,DM表示Workbench中的三维参数化模型,在SolidWorks中完成;DS表示Workbench中的有限元分析模型,在ANSYS Workbench中的Static Structural模块完成;DX表示Workbench中优化过程,在ANSYS Workbench中Goal Driven Optimization中模块完成。
2.1 参数化建模
伸缩臂由三节臂组成,臂截面为矩形。在SolidWorks中首先对第一节臂进行参数化建模[8],如图6所示。

图6 第一节臂截面尺寸参数化建模
其中,a是腹板的长度;b是翼板的长度;h1是上翼板的厚度;h2是下翼板的厚度;h3是腹板的厚度。在SolidWorks中分别命名为:DS_a;DS_b;DS_h1;DS_h2;DS_h3。
在优化过程中,臂与臂间滑块的尺寸参数固定不变,故第二、第三节臂的截面参数可通过第一节臂的截面参数表示。其中各节臂腹板、翼板间距的数值关系如下所示。
DS_a-DS_a_s1=56 mm DS_b-DS_b_s1=50 mmDS_a-DS_a_s2=112 mm DS_b-DS_b_s2=100 mm
其中,DS_a_s1、DS_a_s2分别表示第二、第三节臂腹板的长度;DS_b_s1、DS_b_s2分别表示第二、第三节臂翼板的长度。
伸缩臂的主要作用力都集中在第一节臂上,第二、第三节臂负载较小,理论上基本臂的腹板和翼板的厚度应高于伸缩臂1、2的厚度,但考虑到冲洗机构整体承受的负载较小,各节臂的厚度本身较低,不利于焊接,因此第二、第三节臂的厚度与第一节臂对应相同。
2.2 静力学分析
伸缩臂材料为低合金结构钢Q345A,屈服强度为345 MPa,安全系数取1.33。许用应力[σ]=345/1.33=259.4 MPa;伸缩臂许用变形量[f]=7×10-6×l2=41 mm。
网格采用三角形网格划分法,控制网格单元尺寸设置为15 mm,共生成171 718个节点,53 726个单元。零件间的connection type设置成contacts,contacts type设置为Bounded。
伸缩臂最危险工况是伸缩臂最长的工况,因此在对伸缩臂进行配合装配时即是按照伸缩臂完全伸出的状况进行装配的。该工况下伸缩臂的负载包括:伸缩臂自重G1;支撑液压缸2的作用力F1=5 288 N,垂直作用在伸缩臂表面;由1、2、6组成的喷嘴构件自重G2,经计算M2=165 kg,G2=1 617 N,方向铅垂向下;冲洗作业时喷嘴的反作用力F2。

在Workbench中StaticStructural添加约束和力,伸缩臂的静力学分析结果如图7所示。伸缩臂的最大应力115.75MPa,出现在伸缩臂基本臂的下缘翼板前端和滑块连接处;伸缩臂的变幅平面内最大变形量为0.79mm。

(a)最大应力云图 (b)最大变形云图图7 伸缩臂静力学结果
计算结果表明:伸缩臂最大应力小于许用应力[σ],且变形量远小于许用值[f],因此结构存在较大的优化空间。
2.3 优化分析
优化设计时,截面参数为自变量,伸缩臂最大应力、最大变形量和质量为因变量,自变量取值范围如表1所示,设置如表2所示[9]。

表1 自变量取值范围

表2 优化目标及约束条件设置
Workbench中的Optimization模块根据前期计算结果拟合得到3组满足目标设置条件的候选参数值,结果如表3所示。

表3 优化结果
注:A、B、C是优化结果,由于A、C差别较小,圆整后两组数据完全一样。
由表3知,A、C组的质量一样且最轻,并且最大应力和最大变形量都在强度和刚度条件要求范围内,所以最终选择A或C组作为最终优化结果。圆整A组参数,确定a=200 mm,b=185 mm,h1=4 mm,h2=6 mm,h3=3 mm。
建立伸缩臂优化后的三维模型,在同等载荷作用下,伸缩臂的应力云图和变形云图如图8所示。
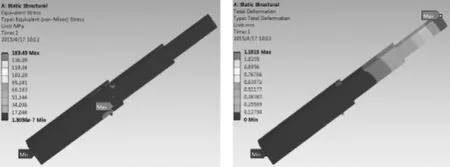
(a)最大应力云图 (b)最大变形云图图8 优化后伸缩臂静力学结果
伸缩臂优化前后的数据如表4示。

表4 优化结果分析
分析表4数据可知,伸缩臂优化前后,质量减少了17.9 kg,优化后臂重减轻22.1%;最大变形量值增加了0.47 mm,较优化前有所增加,但小于许用值41 mm;最大应力有所增加,但小于许用应力259 MPa。结果证明该优化设计方法在保证材料力学性能要求的前提下能提高材料使用效能,降低产品生产成本。
3 冲洗机构模态分析
3.1 振动激励源
模态分析用以提取结构自由振动的振型和固有频率,判断结构的动态特性。冲洗机构安装在铁路轨道牵引平板车上,主要振动激励源包括:轨道不平引起的振动、电机转动引起的振动以及风载振动。三种激励源的振动频率如下:
(1)轨道不平引起的振动频率
轨道不平引起的纵向振动对机构影响最大,激励频率计算公式为f=v/λ,f为频率;v为列车运行速度;λ为波长,取值500 mm[10]。牵引平板车工作时运行速度为10 km/h,求出频率为5.6 Hz;往返运行速度为120 km/h,求出频率为66.7 Hz。
(2)风载振动的频率
根据斯脱罗哈系数的求解公式确定横风向旋涡脱落频率,公式为f=Stv/B,St为斯脱罗哈系数,矩形截面通常取0.15;为来流的平均风速[11]。表5所示是前六级风速对应的旋涡脱落频率。

表5 前六级风速及对应的旋涡脱落频率
(3)电机振动频率
电机转动部分偏心引起的振动频率计算公式为f=n/60,n表示电机实际转速[12]。
3.2 模态分析
冲洗机构在处于全伸状态时受外界振动激励的影响最大,因此提取该状态的前六阶模态。首先在SolidWorks中建立冲洗机构全伸状态装配体,然后在ANSYS Workbech中建立Modal案例并导入模型,计算并提取机构的前六阶模态。图9是机构的前4阶的模态分析结果。表6所示是机构的前6阶振型。
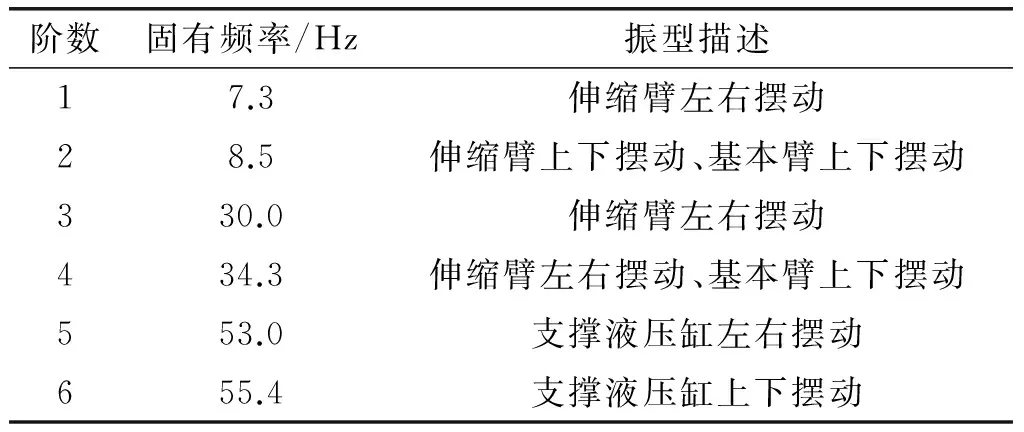
表6 冲洗机构前六阶振型

图9 冲洗机构前四阶振型
分析图9和表6可知,优化后冲洗机构的前6阶固有频率明显避开了振动激励源频率,仅一阶固有频率和6级风速的最高旋涡脱落频率7.3 Hz相等,因此在风速较高的天气中应停止工作。通过n=f×60求出共振频率下的电机转速,电机选择应避免上述转速。
4 结语
本文对新提出的高铁接触网绝缘子冲洗机构进行有限元强度分析及模态分析,得到以下结论:
1)冲洗机构的长度范围是3 300 mm到4 300 mm,在既定的接触网支柱绝缘子冲洗位置处,机构能够充分满足不同位置绝缘子的冲洗要求。
2)在SolidWorks中对伸缩臂进行参数化建模,并利用Workbench对冲洗机构伸缩臂进行轻量化设计,在满足力学性能的前提下,伸缩臂质量减轻17.9 kg,有效提高了材料的使用效能。
3)对优化后的冲洗机构进行了模态分析,结果表明机构动态特性基本良好,同时为机构使用过程中避免共振提供了参考数据。
[1] Miller H C. Surface flashover of insulators[J]. IEEE Transactions on Electrical Insulation, 1989, 24(5):765-786.
[2] Li X F, MacAlpine J M K, Chen J W, et al. A novel insulator and its characteristics[J].Journal of Southeast University(English Edition),2001,17(2): 47-51.
[3] 房光辉.高压带电清扫机器人移动载体的研究[D].上海:上海交通大学,2008.
[4] Nakashima M, Yakabe H, Maruyama Y, et al. Application of semi-automatic robot technology on hot-line maintenance work[C]//IEEE International Conference on Robotics and Automation. Nagoya: IEEE,1995:843-850.
[5] Pelacchi P. Automatic hot line insulator washing device positioned by helicopter[C]//IEEE 8th International Conference on Transmission & Distribution Construction, Operation & Live-Line Maintenance Proceedings. Orlando:IEEE,1998:133-143.
[6] 陈晓国,杨楚明,饶章权.变电设备带电水冲洗技术探讨[J].电网技术,2007,31(2):60-63.
[7] 刘洪良,林杰江,梁湛原,等. 含机械臂作业的变电设备带电水冲洗装备[J]. 电气技术, 2014(10):81-84.
[8] Du W P, Zhang Y J, Zhou C Q, et al. Analysis and optimization of dismantling machine shear head based on ANSYS Workbench[J]. Advanced Materials Research, 2014, 945-949:653-657.
[9] 苏世卿,刘雪东,李柏贤.基于Pro/E与Workbench的超大型蒸压釜壁厚优化设计[J].机械设计与制造,2015(5):249-252.
[10] 赵勇.轻油罐车罐体的动力学分析[D].郑州:郑州大学,2006.
[11] 季斌.高层悬挂结构风致振动响应研究[D].南京:南京航空航天大学,2005.
[12] 武颖利, 蔡新, 李洪煊,等.机组振动下电站厂房共振校核和动力响应分析[J].人民黄河,2010,32(10): 141-143.
Optimization and modal analysis of a new-type insulator washing device for high-speed rail contact line
DENG Bin, ZHENG Tao, WANG Guozhi, QIN Ping
In this study, we carried out static analysis of the telescopic arm of a new-type insulator washing device with ANSYS Workbench, and with Design Exploration, we optimized the section parameters aiming at maximum stress, maximum deformation and minimum weight of the telescopic arm. Under the premise of meeting the load requirements, the overall weight of the telescopic arm was reduced by 22.1% (17.9 kg). We then carried out modal analysis of the telescopic arm at work, and the results showed that the optimized device had good dynamic performance, and that the optimization was feasible.
washing device, ANSYS Workbench, optimization, modal analysis
U469.6
A
1002-6886(2016)05-0020-05
邓斌(1964-),男,湖北荆门人,教授,博士,研究方向:机电一体化及智能驱动。
2016-03-14
