基于Cloude目标分解的极化InSAR地物分类方法
2016-11-04钱方明楼良盛张笑微
钱方明,楼良盛,刘 薇,张笑微,张 昊
1.西安测绘研究所,陕西 西安,710054;2.地理信息工程国家重点实验室,陕西 西安,710054
基于Cloude目标分解的极化InSAR地物分类方法
钱方明1,2,楼良盛1,2,刘薇1,2,张笑微1,2,张昊1,2
1.西安测绘研究所,陕西 西安,710054;2.地理信息工程国家重点实验室,陕西 西安,710054
本文针对利用Pol-InSAR数据进行地物分类的问题,提出了一种基于Cloude目标分解的Pol-InSAR地物分类方法。该方法首先对Pol-InSAR数据进行预处理,抑制噪声影响,然后采用Cloude目标分解结果和极化相干性信息确定初始类别,最后对初始类别利用Wishart分类器进行聚类分析得到分类结果。实验结果表明,该方法在地物类型单一区域分类精度较高,在地物类型多样区域分类精度相对较低。
极化干涉合成孔径雷达;地物分类;Cloude目标分解
1 引 言
地物分类是将图像中的所有像元按其性质分为若干个类别的技术过程,主要任务是提取地物要素信息(几何和属性信息)。通常,地物分类的实现途径有基于光学(高光谱)数据的分类方法和基于极化SAR(Polarimetric SAR,Pol-SAR)数据的分类方法。高光谱遥感的波长范围比较宽,从可见光延伸到短波红外,甚至到中红外和热红外,光谱分辨率高,能够获取地物精细的光谱特征曲线,并可根据需要选择或提取特定的波段来突出目标特征,实现地物的定量分析与提取。其缺点是在数据获取阶段采用被动式传感器,受气候、光照等条件的影响严重;此外,由于表面材质相同的地物具有相同的光谱特性,容易混淆相同材质的不同地物。极化干涉合成孔径雷达(Polarimetric SAR Interferometry,Pol-InSAR)属于主动式微波传感器,兼具极化和干涉测量特性,具备全天候、全天时数据获取能力。它既具有Pol-SAR对地表散射体的细致结构、指向、均衡性以及物质组成敏感的特性,还具有对地物高度敏感的特性[1-3]。Pol-InSAR将相干性信息引入数据处理,能够获取地物类别、地貌形态、植被高度、建筑物高度等信息,提高了地物分类与解译的精细度和准确度,与其它分类手段相比具有显著优势,能广泛应用于地理国情监测、地形图测制和更新以及各种专题图制作[4],还能用于土地资源普查、植被生长监测、农作物估产、海面船只检测等领域[5]。
目前,国内外大多数基于极化数据(主要是Pol-SAR数据)的地物分类研究主要集中在如何根据某些判据实现图像中各类别的划分以及影像最佳分类数目的确定,而对于各类别实际属于什么地物,研究较少。本文基于Pol-InSAR数据首次系统研究了融合极化干涉相位、相干性谱、散射熵等信息进行地物分类与解译的理论与方法,设计了地物分类处理流程,研制了原型系统,提高了非监督分类情况下地物分类与解译的精细度(如可对植被中的树种进行解译)和准确度。
2 Pol-InSAR地物分类
Pol-InSAR与Pol-SAR相比,增加了空间观测通道,能获取较多的地物散射信息,引入了相干性信息,能提取地物高度;Pol-InSAR与单极化InSAR相比,优势在于可以获取目标的多极化散射信息,最大限度地将不同地物的散射特征以矢量的形式表现出来,揭示地物的散射差别,同时能通过极化最优过程[2]得到地物的最大相干系数值。本文从目标散射机理出发,通过相干性分析,提取符合分类条件的目标特征,进而实现目标的分类与识别。Pol-InSAR地物分类主要包括极化滤波、确定初始类别和聚类分析等处理过程,如图1所示。

图1 Pol-InSAR地物分类技术流程
2.1极化滤波
Pol-InSAR数据由多幅Pol-SAR图像组成,在影响图像质量的各种噪声因素中,相干斑噪声的影响比较大。相干斑噪声使SAR图像的辐射分辨率明显变差,同时降低了图像的空间分辨率,严重影响了图像的可解译性以及后续的各种应用[5]。抑制相干斑噪声的影响,一般采用多视处理[6]和滤波,考虑到多视处理会降低数据的分辨率,因此本文采用极化Lee滤波方法[5,7]进行相干斑滤波。该方法以一种类似于多视处理的方式对极化协方差矩阵或极化相干矩阵中的所有元素进行独立滤波,这样既避免了极化通道之间的串扰,又保持了极化通道之间的极化信息和统计相关性,并采用非方形边缘窗口,以保持边缘纹理和点目标。
2.2确定初始类别
大量研究表明,Cloude目标分解是一种有效提取极化信息的方法,该方法提取的极化信息能有效覆盖整个散射机制范围,并能给出散射机制的分布[8]。因此,本文在Cloude目标分解基础上,将相干性和相干系数谱作为附加约束条件来确定初始类别。
(1)Cloude目标分解
基于相干矩阵的特征矢量分析,Cloude提出了能够包含所有散射机理的分解定理。Cloude分解得到三个极化特征参数[5,8]:散射熵H、散射角α和反熵A。它们可以分别定义如下:
(1)
(2)
(3)
其中,αi表示第i种散射机制的类型,Pi表示第i种散射机制的发生概率,Pi可以进一步定义如下:
(4)
其中,λi表示相干矩阵T的特征值。
以上三个特征参数的物理意义为:
①散射熵(0≤H≤1)表示散射单元的不确定性,从单一目标相干散射(H=0)变化到完全非相干散射(H=1)。若H值很低,则认为系统弱去极化(单一目标),小特征值的特征向量可忽略;如果H值很高,则目标的去极化效应很强(时变目标、分布目标),此时不存在一个等效的单一散射体,需要考虑所有的特征值;H=1时,对应回波为完全非极化波,极化信息为0。目标散射实际上是一个随机噪声的过程。
②散射角α的值与散射过程的物理机制相互联系,对应着从奇次散射(或表面散射α=0°)到偶极子散射(或体散射α=45°)到偶次散射(或二面角散射α=90°)的变化,如图2所示。

图2 α角的散射机制解释
③反熵A为散射熵H的一个补充参数,是描述三个特征值的大小关系的重要参数,用以解决散射熵一定时特征值之间关系的模糊,提高确定初始类别的准确性。
(2)相干性
极化散射相干性可用下述相干系数进行表征:
(5)
其中,ω1、ω2表示主、辅图像的极化观测方式;矩阵T11和T22是3×3极化复相干矩阵,分别用于描述各图像的极化特性;矩阵Ω12是3×3非厄米特复相干矩阵,它包含了主、辅图像散射矢量之间的极化和干涉相关性信息;H表示共轭转置。目标区域的相干性反映了分辨单元中各散射机理的散射特性和对应的等效散射中心的稳定性。根据相干系数值可以确定地物类别,如裸露地表的表面粗糙性质(形成类似于微二面角和微三面角的散射机理)和镜面散射使其具有较高的相干性;城市建筑区的人造地物大多呈现二面角和三面角等散射,保持了较高的相干性;水域主要是单次散射,因此,其相干性较低;植被区域存在体散射去相干,因此,具有较低的相干性。
(3)相干系数谱
通过极化相干最优过程[2,9],可以得到一组最优相干系数γopt-1、γopt-2、γopt-3,其幅度相对差异可由下面两个参数来描述:
(6)
其中,A1、A2为相干性谱(相对)参数。在以体散射机理占主导的森林植被覆盖区,属于同一树种且具有相同树高和生物量的植被具有相同的相干性谱,不同树高的植被的相干性谱分布存在一定的差异;不同树种的植被,相干性谱一般也不同。因此,基于二维相干性谱A1、A2的分布情况可对以体散射机理为主的植被覆盖区进行初步的分类,如图3所示。
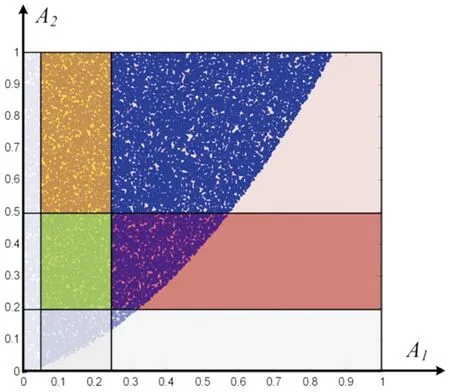
图3 体散射集相干性谱分布示意图

2.3聚类分析
本文采用基于最大似然准则监督分类的Wishart分类器[5],完成Pol-InSAR图像的聚类分析。类初始集确定后,输入M个初始聚类中心的信息,分别计算每一类所有Nm(m=1,2,…,M)个像素的平均协方差矩阵Cm,并以这M个平均协方差矩阵Cm(m=1,2,…,M)作为聚类中心进行聚类分析,对所有图像像素重新分类。在分类过程中,像元被分配给具有最短统计距离的聚类。按照这一准则将所有像素重新分为M类后,计算每一类所有像素的平均协方差矩阵Cm,并以这M个平均协方差矩阵为新的聚类中心,继续对所有图像像素重新聚类。如此迭代若干次,得到较好的地物分类结果。图4所示为Wishart分类器处理流程图。

图4 Wishart分类器处理流程
3 实验结果及分析
实验用Pol-InSAR数据为ESAR系统获取的德国Oberpfaffenhofen地区数据,该系统的波长为23.5cm(L波段),斜距分辨率为1.5m,方位向分辨率为0.89m。图5为该地区的光学图像,图6为分类前利用相干矩阵生成的伪彩色图,图7为利用本文提出的Pol-InSAR地物分类算法处理的结果。

图5 Oberpfaffenhofen地区光学图像

图6 伪彩色图

图7 Pol-InSAR地物分类结果
图7中将场景内的地物分成森林、建筑、农田、裸地、道路(机场跑道)等5类,由于从光学图像上无法获取森林地区的树种信息,因此未对森林地区进行细分。由于光学图像获取时间与Pol-InSAR数据获取时间不同,因此有些地物不能严格对应。选取图7中的5个典型区域(区域1为森林,区域2为居民地,区域3为农田,区域4为裸地,区域5为跑道),以光学影像上地物判读结果为基础,对分类结果进行评估。将每个区域内分类结果(不同地物像素个数)填入表1,计算分类精度,其中居民地区域中统计的是建筑的分类精度。从表1可以看出:森林、农田、裸地、跑道区域地物类型单一,分类精度较高;居民地区域地物类型多样,分类精度较低。
表1Oberpfaffenhofen地区分类结果

分类结果(像素)区域(地物)森林建筑农田裸地道路(跑道)总计分类精度区域1(森林)623385393174656195.00%区域2(居民地)16121885179519661132257(建筑)83.52%区域3(农田)4180806333818198.77%区域4(裸地)00101019101020199.90%区域5(跑道)000010531053100%
4 结 论
本文提出了一种基于Cloude目标分解的Pol-InSAR地物分类方法,该方法首先对Pol-InSAR数据进行预处理,抑制噪声影响,然后采用Cloude目标分解和极化相干性信息确定初始类别,最后利用Wishart分类器进行聚类分析得到分类结果。实验结果表明,该方法在地物类型单一区域分类精度较高,在地物类型多样区域分类精度相对较低。目前,基于Pol-SAR数据的分类方法典型地物的平均分类精度在80%左右[10,11],本文提出的方法与之相比精度有明显提高。如何利用Pol-InSAR数据提高地物类型多样区域的分类精度是今后研究的重点。
[1]周梅,王新鸿,唐伶俐等. 极化干涉合成孔径雷达技术发展与应用[J]. 科技导报,2008,26(21):90-93.
[2]吴一戎,洪文,王彦平. 极化干涉SAR的研究现状与启示[J]. 电子与信息学报,2007,25(5):1258-1262.
[3]楼良盛,刘志铭,钱方明. 全极化InSAR技术在测绘中应用[J]. 测绘科学与工程,2012,32(4):65-70.
[4]冯伍法. 遥感图像判绘[M]. 北京:科学出版社,2014.
[5]王超,张红,陈曦等. 全极化合成孔径雷达图像处理[M]. 北京:科学出版社,2008.
[6]肖国超,朱彩英.雷达摄影测量[M].北京: 地震出版社,2001.
[7]杜丽娜. 极化SAR/InSAR信号处理与应用[D]. 西安:西安电子科技大学,2014.
[8]曹芳,洪文,吴一戎. 基于Cloude-Pottier目标分解和聚合的层次聚类算法的全极化SAR数据的非监督分类算法研究[J]. 电子学报,2008,36(3):543-546.
[9]易恒. 基于极化SAR数据的地表信息提取研究[D]. 长沙:中南大学,2011.
[10]梁志锋,凌飞龙,陈尔学. 全极化SAR数据的最大后验概率分类[J]. 武汉大学学报·信息科学版,2013,38(6):648-651.
[11]郎丰铠,杨杰,赵伶俐等. 基于Freeman散射熵和各向异性度的极化SAR影像分类算法研究[J]. 测绘学报,2012,41(4):556-562.
Polarimetric InSAR Object Classification Method Based on Cloude Target Decomposition
Qian Fangming1,2,Lou Liangsheng1,2,Liu Wei1,2,Zhang Xiaowei1,2,Zhang Hao1,2
1. Xi’an Research Institute of Surveying and Mapping, Xi’an 710054, China 2. State Key Laboratory of Geo-information Engineering, Xi’an 710054, China
An object classification method based on Cloude target decomposition for polarimetric InSAR (Pol-InSAR) is proposed in this paper to resolve the classification problem using Pol-InSAR data. The classification principles and procedure are described and designed. Firstly, the Pol-InSAR data is pre-processed to reduce noise impact, and then the Cloude target decomposition result and polarimetric coherence information are used to confirm the initial classification result. At last, cluster analysis is conducted with Wishart classifier to obtain the final classification result. The experiment shows that the classification precision is higher in areas of single-type object and relative lower in areas of various objects.
polarimetric InSAR; object classification; Cloude target decomposition
2015-10-28。
钱方明(1981—),男,工程师,主要从事InSAR数据处理与应用研究。
P231
A
