基于模块化多电平矩阵变换器的电力电子变压器控制策略
2016-10-29王广柱
王 婷 王广柱 张 勋
基于模块化多电平矩阵变换器的电力电子变压器控制策略
王 婷 王广柱 张 勋
(电网智能化调度与控制教育部重点实验室(山东大学) 济南 250061)
为实现机车牵引电力电子变压器(PET)小型轻量化的目标,对基于模块化多电平矩阵变换器(M3C)的PET新型拓扑结构进行研究。该拓扑结构的核心M3C的易扩展性及输出任意波形的灵活性使该拓扑结构特别适用于中/高电压大功率的场合,尤其是高速动车机组中。该拓扑结构只需要一个中频变压器,在体积和重量上较已存在的拓扑具有明显优势。本文介绍了基于M3C的PET拓扑基本结构,通过建立该拓扑的数学模型,提出了一套M3C和二次侧全桥独立控制策略,用Matlab搭建了该拓扑结构的Simulink模型,并在实时仿真器RT-lab上进行了实时仿真验证,实验结果验证了提出控制策略的可行性和有效性,并具有优良的动静态特性。
电力电子变压器 模块化多电平矩阵变换器 桥臂电流控制 电容电压控制 移相闭环控制
0 引言
电力机车、动车机组中采用的传统工频牵引变压器体积庞大,不仅占用很大的空间,而且质量大、损耗大。笨重而效率低的工频变压器已经不能满足日益提高的速度要求,随着高铁动车的快速发展,牵引变压器作为电力传动系统的关键部件日益向轻量化、小型化和高可靠性方向发展。
实现高速机车牵引变压器小型轻量化是设计变压器的首要目标[1]。为实现这一目标,常常选用电力电子变压器(Power Electronic Transformer, PET)代替工频变压器。PET是一种新型的变压器,通过在常规电力变压器的基础上,引入电力电子变换技术,使变压器的一次、二次电压或电流可以灵活控制,从而具备了解决现代电力系统面临的许多新问题的潜力[2]。它不仅可以实现电压的转换,而且可以通过现代的电力电子变换器实现电能质量控制等功能[3]。与工频变压器相比,中频变压器在减轻重量的同时提高了效率。实际上,PET是通过在变压器的一次侧或二次侧使用电力电子技术为变压器的设计提供了一种不同于传统变压器的设计方法。
针对适用于铁道牵引动力系统的PET,世界各国已研制出了几种PET拓扑结构[4-7],这些拓扑中交流高压侧都采用级联H桥结构,每个级联H桥子模块直流侧与独立的基于中频隔离变压器的双向DC-DC相连,通过各个隔离式双向DC-DC的协调控制实现各级联H桥子模块直流侧电容电压平衡。已有的拓扑结构中需要大量的变压器,体积和重量问题并没有解决,不仅不利于PET的功率密度,而且造价很高[8]。
近年来,德国学者Rainer Marquardt提出的模块化多电平变换器(Modular Multilevel Converters, MMC)[9]引起了人们广泛关注。其易于模块化的设计和易于扩展的特点,特别适用于中/高电压电能变换的场合[10-12]。基于H桥的模块化多电平矩阵变换器(Modular Multilevel Matrix Converters,M3C)可以输出直流和交流电压,不仅能输出工频,也能输出中频用于电力电子变压器[13,14]。Rainer Marquardt在文献[13]提出了AC-AC模块化多电平变换器,并应用于铁道PET领域中,该PET拓扑可大大减少中频变压器的数量,易实现PET小型轻量化的目标,但文中没有给出其控制策略。本文对基于M3C的PET拓扑结构进行了介绍,建立了其核心部分M3C和变压器二次侧全桥数学模型,提出了一套M3C和二次侧全桥独立控制策略。在Matlab中建立了基于单相M3C的PET的Simulink模型,并在实时仿真器RT-lab平台上进行了实时仿真验证,实验结果验证了所提出控制方法的有效性且具有良好的动静态性能。
1 基于单相M3C的PET拓扑结构
图1为基于单相M3C的PET拓扑。M3C包括4个结构相同的桥臂,每个桥臂有个完全相同的H桥子模块,每个H桥子模块由一个H桥和一个直流储能电容组成,并且每个桥臂均串联。图1中,v和i(=1,2,3,4)为四个桥臂电压和电流,i和i为交流输入侧的电压和电流,f和s为变压器一次、二次电压,i为M3C输出电流,out和o为输出直流侧电压和电流。该拓扑的输入为工频交流网侧,输出接中频变压器,变压器二次侧连接一个全控桥,经滤波电容输出直流。关于输出端的DC-AC逆变器部分拓扑及其控制方案已有很多文献报道,本文不再赘述。

图1 基于单相M3C的PET拓扑
该拓扑结构适用于高铁牵引机车等中/高电压和大功率的场合。若要提高电压等级,只需要增加M3C各个桥臂的子模块数量即可。
2 控制策略
2.1单相M3C控制方法
基于M3C的特点,利用各桥臂之间的相对独立性,采用各桥臂电流直接控制的基本思想,即通过检测各桥臂电流,实现各桥臂的电流瞬时反馈控 制[15,16]。要研究M3C的控制策略,则需要建立M3C的交流小信号模型。根据参考文献[15],现以桥臂1为例建立其小信号模型。首先做如下定义,令桥臂1中子模块(=1,2,∙∙∙,)的开关函数为1i,电容电压为1i。当1i=1时,子模块输出电压为1i;当1i=-1时,子模块输出电压为-1i。结合图1可列出电压电流方程,对其求开关周期平均值,得到开关周期平均模型为
式中,为桥臂电感;s为电感串联等效电阻;o为子模块电容;o为子模块电容并联等效电阻。其中开关函数在开关平均周期内的平均值用占空比表示,即。在所有子模块参数完全对称的条件下,当控制各个子模块输出开关周期平均值相同时,则各个子模块具有相同的占空比和相同的直流侧电容电压。
为了得到小信号模型,令
将式(2)代入式(1),展开后忽略二次项,建立桥臂1的传递函数框图如图2所示。图2中,为子模块的开关信号占空比,为开关信号静态占空比,为桥臂1的电流静态值,为子模块电容稳定电压。

图2 桥臂的传递函数框图
与电流变化相比,电容电压和电源电压变化非常缓慢,可以忽略其影响;又由于串联电感等效电阻s很小,可以将其忽略。考虑到主电路PWM控制的滞后影响,这里用简单的惯性环节表示,通常时间常数取,s为子模块载波频率。得到电流闭环控制框图如图3所示。

图3 M3C电流控制闭环控制框图
电流控制要求具有较快的电流跟踪速度和较小的超调量,根据调节器工程设计方法,系统的开环传递函数设计采用典型I型系统,电流调节器取比例调节器。
M3C中各变量基本关系分析:对于单相M3C,由于结构参数对称,通过适当的控制,电压可独立施加在输入、输出端。桥臂电压和两端口电压的关系为
由式(3)可知,当施加于四个桥臂电压满足上述关系时,输入、输出端可得到所需的电压。假设所有电容电压均相同,根据结构的对称性,输入电流均分到两个桥臂中。同理,M3C输出电流即图1中也是一样。所以有桥臂电流
忽略电感串联电阻s的影响,桥臂静态工作点占空比为
式中,o为变换器M3C理想输出电压,在下文有介绍。结合图3可得到桥臂电流直接控制策略框图如图4所示。其中,为桥臂的电流参考值,为桥臂公共占空比。

图4 桥臂电流直接控制策略
根据前文中对M3C中变量的分析,由式(4)、式(5)可得上、下桥臂(1、2桥臂)瞬时功率为
根据桥臂瞬时功率和直流侧电流的关系及子模块直流侧电压和电流的关系可知,桥臂瞬时功率决定该桥臂子模块直流侧的纹波电流成分,且子模块直流侧电流决定子模块纹波电压波动成分及其波动规律[17]。在电容电压闭环控制时,必须设法滤除电容电压反馈值中的电压纹波,否则会使电压调节器输出中带有同样的电压纹波,由下文可知,桥臂的参考电流信号由电压调节器的输出组成,若纹波不滤除,则会引起电流参考信号中出现不应有的谐波电流成分。一般用低通滤波器滤除电容电压反馈信号中的纹波电压。根据文献[17]可知该拓扑子模块直流侧含有电源二倍频及高次纹波电压,在实际中,为了简单,常用电源周期滑动平均滤波算法实现低通滤波,若电源周期为50Hz,其时间常数为20ms,对于40点滑动滤波(采样周期),滑动平均滤波时间常数等效为(=40)。
在桥臂电流独立控制的基础上,根据参考文献[18]将M3C电容电压平衡控制分解为3个层面——M3C层次化电容电压平衡控制:①通过微调M3C的总有功功率,实现M3C上、下桥臂所有子模块电容总电压平均值控制;②通过微调上、下桥臂之间的有功分配,实现上、下桥臂电容总电压之间的均衡控制;③通过微调各个子模块输出电压来微调各个子模块间的有功功率分配(因流过同一桥臂的各子模块电流相同),实现同一桥臂上各子模块间的电容电压均衡控制。上、下桥臂(1、2桥臂)综合控制策略框图如图5所示。

图5 M3C的综合控制策略框图
同一个桥臂各子模块之间也需要进行平衡控制,上桥臂和下桥臂各子模块在电容电压平衡微调环节的输出占空比,与桥臂公共占空比信号1和2叠加即得到每个子模块的占空比,输入到载波移相控制器后,得到相应占空比的PWM信号驱动子模块的开关管。本文中调制方式采用的是载波移相PWM调制。
2.2 移相闭环控制
该PET拓扑中M3C的四个桥臂中的电感参数一样,结合图1及其参数关系,M3C输入侧的频率明显低于输出侧的频率,上、下桥臂电感上的压降可以看作近似相等,所以上、下桥臂电感可以看作并联关系,电感值变为原来的一半,等效出来的两个电感又是串联的关系,则在M3C输出侧(变压器一次侧)等效为一个电感,等效电路如图6所示。

图6 M3C输出后的等效电路
图6中,o为M3C理想输出的中频方波,用滞后或超前o一定角度的触发脉冲触发变压器二次侧全桥,则在变压器的二次侧得到滞后或超前o同样角度、幅值为输出电压out的方波电压s,通过控制该移相角控制输出电压out。本文采用输出电压移相闭环控制[19,20],电压调节器输出为移相占空比。o、f、i和输出电流o波形如图7所示。

图7 变压器一次侧和输出电流波形
f和s相位关系相同,o和f是相位相差的同频方波。根据对称性,由输出电流o和电流i的关系,可以得到
式中,为o和之间的移相占空比且,为移相角。为了得到小信号模型令
则有
结合图6有
将式(9)代入式(10)中得到
由式(11)得到移相闭环控制结构如图8所示。其中()为设计的电压调节器,该闭环控制的开环传递函数为

图8 移相闭环控制框图
输出电压的波动量可表示为
如果开环增益足够大,则输入电压o的波动变化导致输出电压的变化可以忽略,则可简化系统的传递函数,提高其性能。补偿之前的开环函数为
2.3 基于单相M3C的PET综合控制策略
本文采用M3C和变压器二次侧全桥独立控制策略,对M3C的控制主要得到理想的中频方波输出(即图6中o),移相控制则是对变压器二次侧全桥控制,将相对于o滞后或超前一定角度的触发脉冲施加于二次侧全桥,控制直流侧输出。可以看出,从M3C输出到最后的输出部分类似双全桥DC-DC变换器,所以移相控制同样和双全桥DC-DC控制相似。
3 实时仿真验证
本文首先在Matlab/Simulink平台中搭建了基于单相M3C的PET模型。将运行成功的原始模型按照RT-lab的要求编辑成可供RT-lab使用的Simulink模型,并在RT-lab中对模型进行编译、分配节点和加载,实现模型在上位机和目标机上的运行,在实时仿真器RT-lab平台上进行实时仿真验证。本文使用的是OP5600仿真机,通过RT-lab的I/O口用示波器测量所需观测的量。
本文主要完成实时仿真验证,所以选择的电压等级较低,输入侧的电压为220V/50Hz的交流电,每个桥臂有4个子模块,每个桥臂串联的电感为1mH,子模块并联的直流储能电容为2.4mF,变压器的频率为500Hz,变压器的电压比为1∶1,载波频率为5kHz,输出侧电容为10mF,电阻为16W,输出功率为10kW。因为实时仿真器RT-lab的最小仿真步长为10ms,所以实验仿真步长取20ms。
根据电路参数有
本文取()=0.01,可得到开环传递函数
为了改善系统在低频带的扰动特性,调节器选择PI调节器
式中,取P=0.1,I=1。
本文从启动过程、稳定状态、负载变化和能量双向传输等方面进行了实时仿真验证。
图9为启动时的波形图。其中out为负载直流侧的输出电压;i和i为M3C输入侧的电压和电流;11为M3C桥臂子模块电容电压。可以看出,启动过程需要约2s达到稳定状态。

图9 启动时的波形
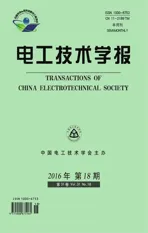
图10为能量正向传输稳定时的波形。其中图10a中的符号和图9中的一样;图10b为图6中等效电感前后的电压o和f以及流过变压器一次电流。可以看出,M3C的输入电压和电流同频同相,也就是说功率因数为1,该控制策略具有优良的静态特性。

(a)

(b)
图10 能量正向传输稳定波形
Fig.10 Waveforms of power forward transmission in steady state
图11为突加负载时的波形。本文在突变时刻加了32W的负载。可以看出,在突加负载之后,out和子模块电容电压会有小的波动,但都在2s内达到稳定状态,该控制方案具有优良的动态性能。

图11 突加负载时的波形
图12为功率正向传输变为反向传输时的波形图。功率正向传输时,负载侧为16W电阻,o相对f超前20°移相角;功率反向传输时,负载侧接400V电动势,f相对于o超前20°移相角。可以看出,当功率正向传输时,输出侧电压out稳定约为490V;当功率传输方向突变时变为400V。通过i和子模块电容电压波形可知该控制策略具有良好动态响应速度。

图12 能量传输方向改变时波形
图13为功率反向传输稳定时的波形。可以看出,M3C输入侧的电压i和电流i是反相的,能量从输出侧传向网侧。因为M3C的多电平结构及RT-lab步长参数设置的限制,由多电平组成的o不能输出标准的方波,但不影响整体的控制效果。
(a)

(b)
图13 能量反向传输时的稳定波形
Fig.13 Waveforms of power backward transmission in steady state
4 结论
本文为了实现铁路牵引PET的小型轻量化目标,对基于M3C的PET新型拓扑结构进行了介绍,通过对其数学模型的分析,提出了一种M3C和二次侧全桥独立控制策略:该拓扑的核心M3C采用桥臂电流独立控制和兼顾电容电压平衡控制的协调控制策略,而输出侧采用电压闭环移相控制,通过控制变压器二次侧全桥触发脉冲的移相角实现对输出的控制。该PET不仅可以稳定运行,而且从启动过程、负载变化和能量双向传输等方面进行了实时仿真,实验结果表明,提出的控制策略具有较好的静动态性能,验证了它的有效性和可行性。
参考文献
[1] 张雪原, 吴广宁, 何常红, 等. 车载牵引变压器小型轻量化研究[J]. 机车电传动, 2007 (4): 5-8.
Zhang Xueyuan, Wu Guangning, He Changhong, et al. Study on miniaturization and lightening of on-board traction transformer[J]. Electric Drive for Locomo- tives, 2007(4): 5-8.
[2] 王丹, 毛承雄, 陆继明. 自平衡电子电力变压器[J]. 中国电机工程学报, 2007, 27(6): 77-83.
Wang Dan, Mao Chengxiong, Lu Jiming. Auto balancing electronic power transformer[J]. Pro- ceedings of the CSEE, 2007, 27(6): 77-83.
[3] 凌晨, 葛宝明, 毕大强. 配电网中的电力电子变压器研究[J]. 电力系统保护与控制, 2012, 40(2): 34-39.
Ling Chen, Ge baoming, Bi Daqiang. A power elec- tronic transformer applied to distribution system[J]. Power System Protection and Control, 2012, 40(2): 34-39.
[4] Steiner M, Reinold H. Medium frequency topology inrailway applications[C]//2007 European Conference on IEEE Power Electronics and Applications, Aalborg, 2007: 1-10.
[5] Taufiq J. Power electronics technologies for railway vehicles[C]//IEEE Power Conversion Conference- Nagoya, 2007: 1388-1393.
[6] Jih-Sheng L, Maitra S, Goodman F. Performance of adistribution intelligent transformer ender source and load disturbances[C]//Proceedings of the 2006 Indu- stry Applications Conference(IAS), Florida, USA, 2006: 719-725.
[7] 王奎, 郑泽东, 李永东. 一种新型的无变压器级联型多电平变换器拓扑[J]. 电工技术学报, 2011, 26(8): 1-6.
Wang Kui, Zheng Zedong, Li Yongdong. A novel transformerless cascaded multilevel converter topo- logy[J]. Transactions of China Electrotechnical Society, 2011, 26(8): l-6.
[8] 李子欣, 王平, 楚遵方, 等. 面向中高压智能配电网电力电子变压器研究[J]. 电网技术, 2013, 37(9): 2592-2601.
Li Zixin, Wang Ping, Chu Zunfang, et al. Research on medium- and high-voltage smart distribution grid oriented power electronic transformer[J]. Power System Technology, 2013, 37(9): 2592-2601.
[9] Lesnicar A, Marquardt R. An innovative modular multilevel converter topology suitable for a wide power range[C]//2003 IEEE Power Tech Conference Proceedings, Bologna, 2003, 3: 1-6.
[10] 雷鸣, 李耀华, 葛琼璇, 等. 一种新型单桥臂电感模块化多电平变流器及其控制方法[J]. 电工技术学报, 2014, 29(2): 231-238.
Lei Ming, Li Yaohua, Ge Qiongxuan, et al. A new modular multilevel converter with single arm inductor and its control strategies[J]. Transactions of China Electrotechnical Society, 2014, 29(2): 231-238.
[11] 高建, 苏建徽, 高航, 等. 模块化多电平换流器电容电压与环流的控制策略[J]. 电力系统保护与控制, 2014, 42(3): 56-62.
Gao Jian, Su Jianhui, Gao Hang, et al. Capacitor voltage and circulation current control strategy in modular multilevel concerter[J]. Power System Pro- tection and Control, 2014, 42(3): 56-62.
[12] 陈耀军, 陈柏超, 袁佳歆, 等. 模块化多电平逆变器电容电压及环流控制[J]. 电工技术学报, 2014, 29(10): 166-174.
Chen Yaojun, Chen Baichao, Yuan Jiaxin, et al. The control of capacitor voltages and circulating currents of the modular multilevel inverter[J]. Transactions of China Electrotechnical Society, 2014, 29(10): 166-174.
[13] Glinka M. A new AC/AC multilevel converter family[J]. IEEE Transactions on Industrial Elec- tronics, 2005, 52(3): 662-669.
[14] Glinka M, Marquardt R. A new single phase AC/AC multi-level converter for traction vehicles operating on AC line voltage[J]. EPE-European Power Elec- tronics and Drives Journal, 2004, 14(4): 7-12.
[15] 王广柱. 模块化多电平换流器桥臂电流直接控制方案[J]. 电力系统自动化, 2013, 37(15): 35-39.
Wang Guangzhu. An arm current direct control scheme for modular multilevel converters[J]. Auto- mation of Electric Power Systems, 2013, 37(15): 35-39.
[16] 郑博文, 武守远, 戴超波, 等. 模块化多电平换流器分桥臂电流控制策略[J]. 电网技术, 2013, 37(6): 1742-1731.
Zheng Bowen, Wu Shouyuan, Dai Chaobo, et al. Anindividual bridge arm current control strategy for modular multilevel converter[J]. Power System Tech- nology, 2013, 37(6): 1726-1731.
[17] 李峰, 王广柱. 模块化多电平矩阵变换器电容电压纹波稳态分析[J]. 中国电机工程学报, 2013, 33(24): 52-58.
Li Feng, Wang Guangzhu. Steady-state analysis of sub-modular capacitor voltage ripple in modular multilevel matrix converters[J]. Proceedings of the CSEE, 2013, 33(24): 52-58.
[18] 张兰华. 模块化多电平变换器设计及其控制策略研究[D]. 济南: 山东大学, 2012.
[19] Guo X, Jiang J, Niu L, et al. A 10kW DC-DC system based on a bidirectional high-frequency isolated dual active bridge DC-DC topology[C]//2011 IEEE Power Engineering and Automation Conference (PEAM), Wuhan, 2011, 1: 50-54.
[20] 程红, 高巧梅, 朱锦标, 等. 基于双重移相控制的双向全桥DC-DC变换器动态建模与最小回流功率控制[J]. 电工技术学报, 2014, 29(3): 245-253.
Cheng Hong, Gao Qiaomei, Zhu Jinbiao, et al. Dynamic modeling and minimum backflow power controlling of the bi-directional full-bridge DC-DC converters based on dual-phase-shifting control[J]. Transactions of China Electrotechnical Society, 2014, 29(3): 245-253.
The Control Strategy of Power Electronic Transformer Based on Modular Multilevel Matrix Converters
(Key Laboratory of Power System Intelligent Dispatch and Control Ministry of Education Shandong University Jinan 250061 China)
To achieve the goals of compact size and lightweight of on-board traction power electronic transformer (PET), this paper studies a new topology of PET based on modular multilevel matrix converters (M3C). The new PET is available in medium/high voltage and high power occasions, especially in high-speed EMU unit, since M3C as the core of the PET is easily extended and exports arbitrary waveform flexibly. Compared with the existing topologies, the proposed topology requires only one MF transformer, which is superior to the existing circuits in terms of volume and weight. This paper describes the proposed circuit topology. Through establishing the mathematical model of the topology, this paper presents an independent control scheme of M3C and secondary controlled bridge. According to the model of the PET built in Matlab/Simulink platform, the simulation experiments based on RT-lab real-time simulation platform are carried out. The simulation results verify the proposed control scheme, which has excellent dynamic and static characteristics.
Power electronic transformer, modular multilevel matrix converters, arm current control, capacitor voltage control, phase loop control
TM41
王 婷 女,1988年生,硕士,研究方向为电力电子在电力系统中的应用。
E-mail: wangting091118@163.com(通信作者)
王广柱 男,1963年生,教授,博士生导师,研究方向为现代电力电子技术及应用和电缆故障诊断技术。
E-mail: sdwfz@sdu.edu.cn
2014-07-28 改稿日期 2014-11-06
国家自然科学基金(51177095、51277115)和山东省自然科学基金(ZR2011EEM026)资助项目。