基于H∞的分布式光伏并网系统的协同跟踪控制
2016-10-22瞿丽杨富文邱全伟
瞿丽,杨富文,2,邱全伟
(1.华东理工大学信息科学与工程学院,上海 200030;2.格里菲斯大学工程学院,澳大利亚黄金海岸 QLD 4222)
基于H∞的分布式光伏并网系统的协同跟踪控制
瞿丽1,杨富文1,2,邱全伟1
(1.华东理工大学信息科学与工程学院,上海 200030;2.格里菲斯大学工程学院,澳大利亚黄金海岸 QLD 4222)
针对光伏微网并网系统提出了一种分布式协同控制策略。该策略通过搭建一个环形通信结构,实现各个光伏逆变系统之间的信息共享,实现分布式控制。整个控制系统分为2层,上层控制策略为协同跟踪控制;下层控制针对单个光伏单元控制器鲁棒性能较差等问题,设计H∞控制器。这种策略使光伏发电并网单元收敛和运行在同样的可用功率输出比上,确保分布式光伏发电系统的稳定。最后,通过Matlab/Simulink搭建了仿真平台,验证了所提出控制策略的有效性。
光伏并网发电系统;H∞控制器;环形通信网络;协同控制;分布式控制
光伏并网系统通常由光伏阵列、PWM环节、变换器、滤波器、控制器等连接电网组成。目前,在逆变器并网控制中得到研究和应用的控制技术包括:PID控制、滞环控制、重复控制、滑模变结构控制、无差拍控制等[1-4]。电网负载复杂多变,由于系统的部分参数的不确定性,会引起控制系统的波动,导致不稳定,因此要求控制器具有很强的鲁棒性。一般来说,设计控制器时,通常需要把系统的跟踪性能、稳定性和抗干扰性能同时纳入考虑,但是这3者是相互牵制的,不可能同时满足[5]。针对光伏逆变器的控制问题,文本提出了通过设计混合灵敏度指标的H∞控制器来应对电网负载的波动,保持并网系统的稳定性和抗干扰能力[6-7]。
通常管理光伏单元的输出有3种控制模式:集中模式、分散模式和分布式模式[8-10],集中模式接收和发送系统的信息均要覆盖全网络,对于在不同地域分布的光伏单元而言,这种控制模式成本高,但控制结构简单,通信延迟小。基于分散模式的控制策略包括恒功率控制、最大功率点跟踪控制、恒压恒频控制等。通过本地测量信息,分散模式的系统相对强健。但在该模式下光伏单元很难在不同因素(如负载变化)的影响下保证它们适当的运行点。分布式控制使用局部通信网络,它结合了集中式和分散式控制两者的优点,PV单元可以从附近的单元获得信息并将其纳入控制策略中,控制器不需要与系统中的每个发电单元通信也能合理地调整光伏单元的输出,这样很大程度上减小了通信成本。
本文采用了一种基于环形通信网络的分布式模式,通过设计平衡的环形通信网络,提出了一种基于H∞控制的协同控制的2层分布式控制策略。顶层控制通过电网功率给定,设计PI控制器,在环形平衡通信网络的基础上将顶层控制输出传递给各个光伏单元,实现给定信号的协同跟踪效果。底层控制针对单个光伏单元,通过设定混合灵敏度性能指标,设计了一种H∞电流控制器,使每一个光伏单元的交流总线上的电流都跟踪给定的参考电流。最后通过Matlab/Simulink搭建了含多个光伏单元的分布式并网光伏发电系统的仿真平台,验证了所提控制策略的有效性。
1 系统模型及控制系统的设计
1.1单光伏发电系统拓扑结构
1.1.1单光伏发电系统拓扑结构
传统的单相光伏逆变器可以简化成如图1所示的拓扑结构。直流电压Vd表示光伏电池的输出直流电压,二极管D保证逆变器能量的单相流通,C1为直流侧稳压电容。逆变单元由开关功率管S1~S4表示,通过SPWM调制将直流电转变为交流电。L1和C2形成1个LC滤波器,用来将逆变单元输出方波的高频成份过滤,保留基波成份。R1为线路电阻,阻值很小,可以忽略。一般来说,电网负载为感性,L2和R2表示并网过程中的馈线参数,在实际情况中有一定的波动,也可以代表电网负载的情况。
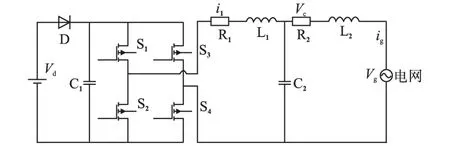
图1 单相光伏并网系统Fig.1 Single-phase photovoltaic grid-connected system
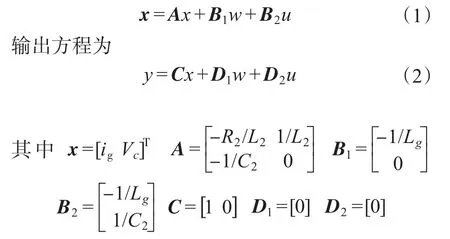
本文采用状态空间法来建立单相逆变器并网系统的模型。选择电网电流ig和滤波电容电压Vc作为状态变量x,电网电压vg作为干扰变量w,i1作为系统输入u,电网电流ig作为输出信号y,由此可以得到状态方程为
1.1.2单光伏发电系统H∞控制器设计
逆变器并网的主要目标为控制并网电流的幅值、频率和相位。因此图1所示的逆变器系统可以由图2a中的广义对象P来表示,K表示所需要设计的控制器。其中,系统模型P可以描述为[4]

将单相逆变器并网控制器的跟踪性能、稳定性和抗干扰性能同时纳入考虑,本文在设计单个逆变器的控制器的过程中,通过选择合适的误差跟踪加权函数W1、鲁棒稳定性加权函数W2,使灵敏度函数S(s)=(I+PK)-1和补灵敏度函数T(s)=(I+PK)-1PK从变小的频域分离,在高频段以减小T(s)的增益为主,而在低频段以减小S(s)的增益为主。设定如下混合灵敏度性能指标则H∞控制系统的框图如图2b所示。
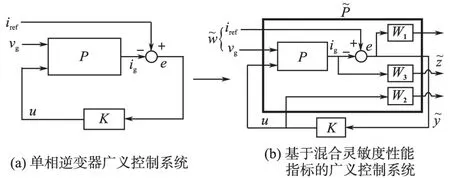
图2 单相逆变器广义控制系统框图Fig.2 Single-phase inverter general control system structure
通过内模原理选择一个标准的二阶系统作为误差跟踪加权函数W1,选择W2为常数0.1进行加权保证被控矩阵满秩,选择W3保证系统工作在馈线参数最差的情况下依然能维持稳定。设电网馈线参数变化范围为L2∈[0.2,0.8]mH,R2∈[0.1,0.8]mH,当馈线参数呈最差的感性时,对并网要求最高,即当L2=0.8 mH,R2=0.1 Ω时,系统处于最差工作状态,选定鲁棒稳定性加权函数为
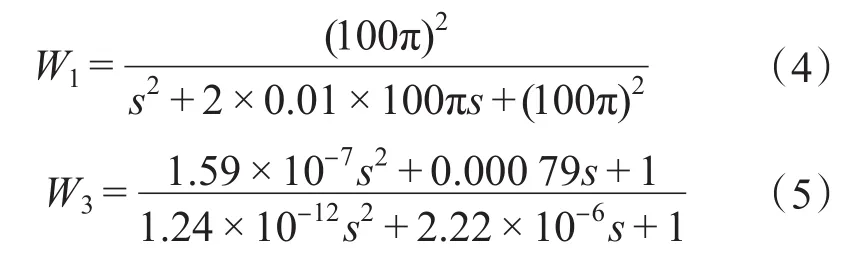
最终通过采用Matlab鲁棒工具箱中的Hinfsyn函数来设计H∞控制器,利用Matlab中的降阶工具对所得到的控制器进行降阶处理[2],可以得到H∞控制器为

1.2分布式光伏发电系统的顶层控制系统
针对分布式光伏发电系统,本文采用了一种基于平衡的环形通信网络上的协同控制方案。环形通信方案相比于主从集中控制方案具有通信成本少的特点,主要体现在通信端口数目减少和通信隔离电压减小两个方面。具体通信方案和控制结构如图3所示。
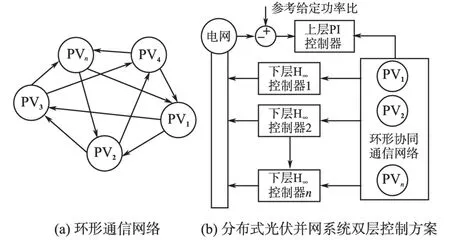
图3 分布式光伏并网协同通信结构和控制结构Fig.3 Structures of communication and cooperation control of the distributed photovoltaic grid-connected system.
在图3a平衡的环形通信网络中,每个单元节点接受上两个节点的输出信息,向下两个节点发送输出信息,实现整个环网中各个节点的信息共享,达到协同控制的目的。以节点2为例,通过接收节点1和n的输出信息作为自身的电流参考输入,所得到的输出信号又发送给节点3和4,每个节点都按照这个规律接收前两个节点和向后两个节点发送信息,每个信息流的权数为0.5,因此该通信系统是一个平衡的系统。在图3b所示的控制结构中,从电网的角度出发,根据电网需求量,控制系统的控制目标为每个光伏发电单元都贡献相同的功率比率,其数学表达式为

式中:Pi,Pimax分别为第i个单元的实际有功功率和最大有功功率;α为有功功率输出比率。
在光伏渗透率比较高的分布式光伏发电系统中,各个光伏发电小组的功率输出比可能稍有不同,为了不失一般性而选择统一的值。顶层控制系统保证了光伏并网系统对电网需求功率给定的跟踪性能,把控制信号通过环形通信网络传送到每个光伏节点,让每个节点发出相同比例的功率,最终使整个光伏系统输出相应的功率。
采用环形通信方案来完成各光伏发电系统的协同控制的可行性主要受控制延时的影响,一方面存在通信延时,另一方面是由于在有功控制过程中,对电网电压有效值的测量有很大的延时。在单相系统中,有效值最少的测量时间为1个周期,经过环形通信结构,这样带来的通信延时对整个系统的影响是很大的。
2 实验结果及分析
本文以4个光伏单元组成的微网系统为例,系统中部分参数的设置如下:PV2,PV3,PV4的最大功率为66 kW,PV1的最大功率为132 kW。即PV2,PV3,PV4的最大输出电流为30 A;PV1的最大输出电流为60 A。LC滤波器参数Ll=73.4 mH,C2=5.3 μF,光伏直流电压Vd=400 V。电网馈线相关参数范围L2∈[0.2,0.8]mH,R2∈[0.1,0.8]Ω,L1=4 mH,C2=50 μF,R1=0.01 Ω,R3=0.5 Ω。为了简便,假设电网电压为220 V,4个变压器均为1∶1的工频隔离变压器,将逆变器与电网隔离开来。负载消耗22 kW的有功功率。图4为整个微网的拓扑和控制系统。
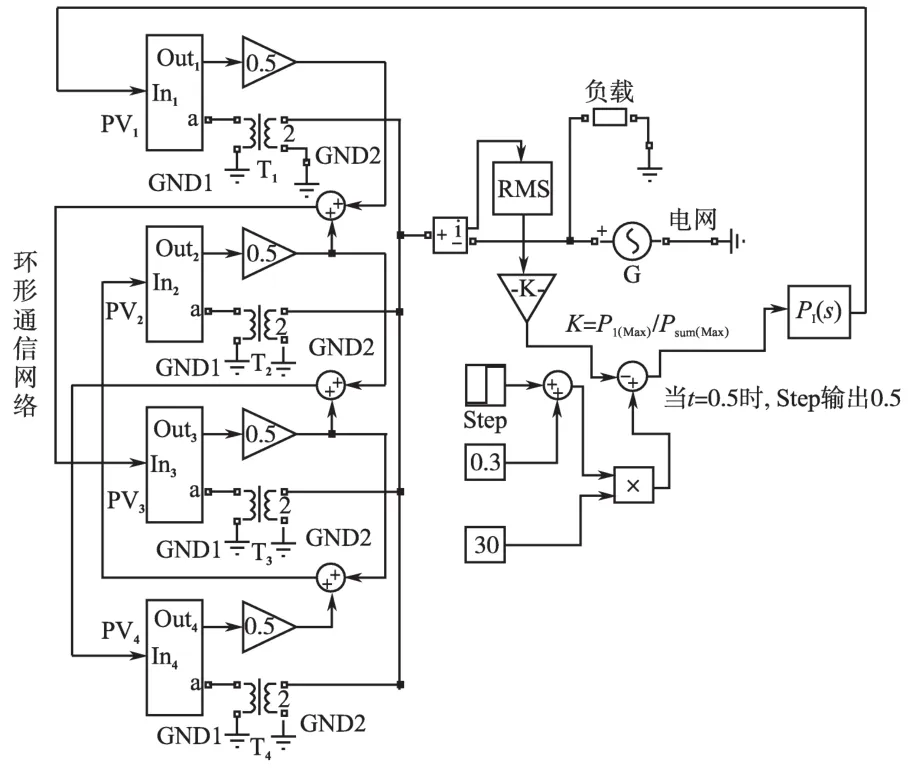
图4 分布式光伏并网发电的仿真验证系统拓扑及控制图Fig.4 Simulation topology and control diagram of the distributed photovoltaic grid-connected system
本次仿真的控制目标为:即初始状态下α= 0.3,在系统仿真进行到0.5 s时,α=0.8。由于采用基于环形通信网络的分布式协同控制,假设PV1先接到上层控制输出,为了防止逆变器输出饱和超出其最大功率,将微网系统发出的总功率中PV1的部分作为输出反馈量,与给定功率比进行比较,通过PI控制器进行调节。发送功率比α=0.3。PV1先接到上层控制信号,然后通过平衡环形通信网络实现各个光伏并网单元的协同控制。
2.1H∞控制器仿真结果分析
对H∞控制器进行分析,当给定电流有效值为10 A时,对于单个光伏单元,当馈线电阻和电感参数处于常态时,即L2=0.45 mH,R2=0.2 Ω时,输出电流波形如图5所示。由图5可知,H∞控制器具有快速跟随性能,在1个电网周期内就能实现无静差调节。通过改变馈线参数,在馈线电阻和电感变化剧烈时,依然能够保持稳定。
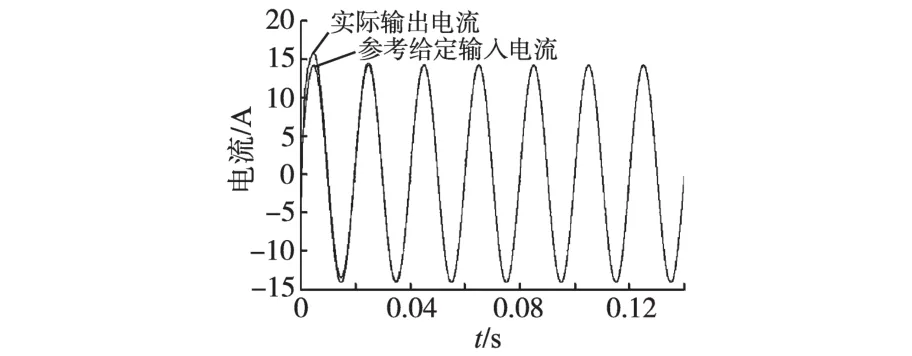
图5 单个光伏单元H∞控制器控制输出波形Fig.5 Output current of theH∞controller of a single photovoltaic inverter
2.2上层协同控制仿真结果分析
在设计上层协同控制器时,应先分析环形通信系统的稳定性。采用1.1中设计的H∞控制器,通过建立线性对应的线性系统,通过Matlab线性系统工具箱,将光伏并网系统简化为线性系统模型,绘制全局给定功率比和输出功率比的伯德图可以得到控制系统的带宽,进而可以分析环形通信回路对整个系统控制的影响。通过将非线性逆变器并网系统等效转换为线性模型,主要考虑电压电流有效值模块等延时环节,用一阶惯性环节表示,e-Ts≈1/(Ts+1),来观察不同PI参数时系统的频率响应。图6为上层控制系统开环伯德图,通过分析可知,在该环形通信网络下,系统的相位裕度足够充分,可以保证系统的稳定性。将可取的PI参数在非线性系统中进行仿真验证,考虑逆变器单元的超调等控制指标,最终设计上层PI控制器为Kp=1.5,Ki=50。
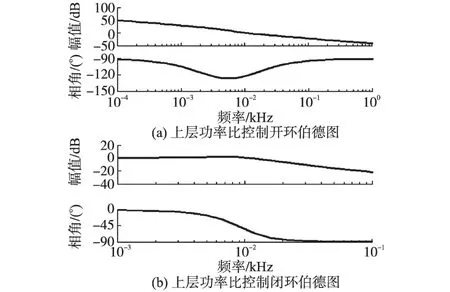
图6 上层功率控制伯德图Fig.6 Bode plot of the upper layer control of the power ratio of the whole system
由图7和图8所示的系统对电网给定功率的跟踪结果可知,顶层PI调节器基本实现了无静差跟踪。
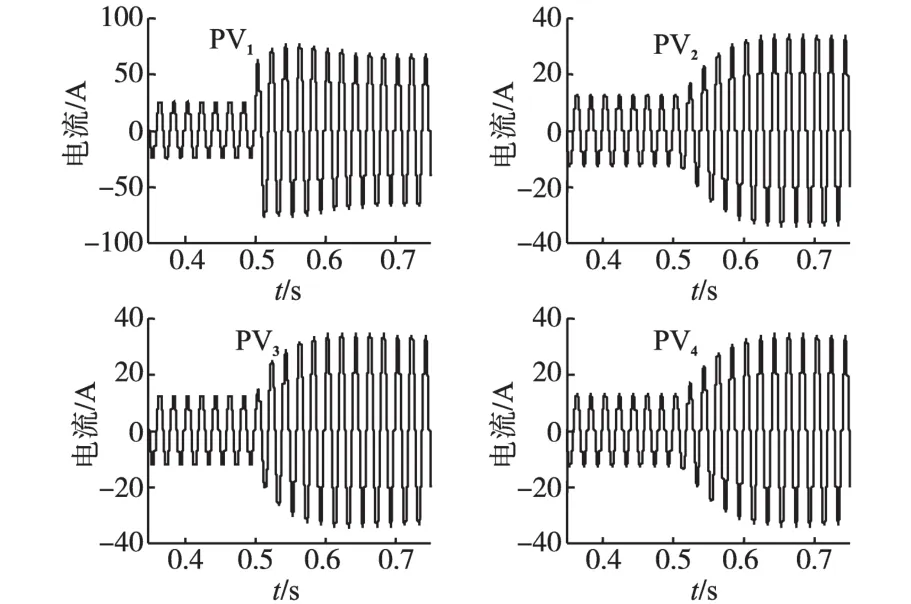
图7 各光伏发电单元的输出电流波形Fig.7 Output current of each photovoltaic inverter
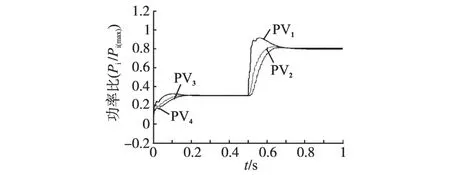
图8 各光伏单元输出功率比跟踪波形Fig.8 Output power ratio of each photovoltaic inverter
如图7所示,由于PV1为PV2,PV3,PV4的最大功率的2倍,因此在并网电压一致的情况下,逆变器PV1的输出电流为其他3个逆变器的2倍。如图8所示,由于第1个逆变器PV1先接收到上层控制输出,因此最先做出反应,PV2,PV3,PV4的响应存在一定程度的延时。但最终均能实现给定功率比的控制目标。整体验证基于环形通信网络的协同控制的可行性。图9的并网电流和电网电压波形相位基本一致,在给定功率比变化时,光伏微网提供的总电流也会相应上升至新的稳定值,因此验证了本文有功功率并网控制的可行性。
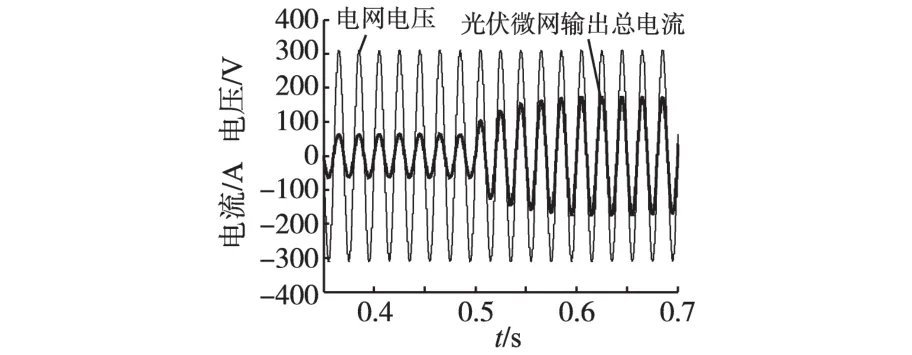
图9 并网电压电流图Fig.9 Grid voltage and grid connected current
3 结论
本文针对分布式并网发电系统提出了基于环形平衡通信网络的双层协同控制,设计了基于混合灵敏度性能指标的H∞控制器,解决了传统控制器鲁棒性能较差,受负载波动影响较大的问题。而上层协同控制所采用的环形通信方案实现了各个光伏单元之间的信息传递,采用传统的PI控制,PI控制器又能保证各个分布式发电单元工作在相同的功率比下,维持了电网的稳定性。仿真结果也验证了理论的可行性。
[1]何俊,彭力,康勇.PWM逆变器PI双环模拟控制技术研究[J].通信电源技术,2007,24(3):1-3.
[2]Zhang K,Kang K,Xiong J,et al.Repetitive Waveform Correction Technique for CVVF SPWM Inverters[C]//IEEE PESC Conf.Rec.,2000:153-158.
[3]陈庆学,南余荣,孟飞锋.全桥逆变器的滑模控制器设计及仿真[J].机电工程,2008,25(5):61-64.
[4]Hornik T,Zhong Q C.H∞Repetitive Current Controller for Grid-connected Inverters[C]//IEEE Ind.Electron Conf.,2009:554-559.
[5]Lee T S,Chiang S J,Chang J.M.H∞Loop-shaping Controller Designs for the Single-phase Ups Inverters[J].IEEE Transactions on Power Electronics,2002,16(4):473-481.
[6]陈宝远,邹丽爽,吴茜,等.基于H∞控制算法的单相逆变电源控制器研究[J].哈尔滨理工大学学报,2010,15(4):14-18.
[7]Yang S,Lei Q,Peng F Z,et al.A Robust Control Scheme for Grid-connected Voltage Source Inverters[J].IEEE Trans.Ind.Electron.,2011,58(1):202-212.
[8]Timbus A V,Rodriguez P,Teodorescu R.Control Strategies for Distributed Power Generation Systems Operating on Faulty Grid[J].IEEE Int.Symp.Ind.Electron.,2006,2:1601-1607.
[9]Zobaa A F,Cecati C.A Comprehensive Review on Distributed Power Generation[C]//Int.Symp.Power Electron Elec.Drives,Auto.Motion,2006:514-518.
[10]Jin T,Jimenez J A.Review on Planning and Automation Technologies for Distributed Generation Systems[C]//IEEE Conf.Auto.Sci.Eng.,2010:269-274.
Cooperative Tracking Control Based onH∞for Distributed Photovoltaic Grid-connected System
QU Li1,YANG Fuwen1,2,QIU Quanwei1
(1.Institute of Information Science and Engineering,East China University of Science and Technology,Shanghai 200030,China;2.Griffith School of Engineering,Griffith University,Gold Coast Campus,QLD 4222,Australia)
A distributed cooperative control method for the multiple photovoltaic grid-connected system was proposed.It was based on a ring communication structure through which the control messages were shared between the PV nodes.The control system was based on a two-level control strategy.The upper layer control strategy was to organize all the PV nodes to work cooperatively to track the reference power of the grid for the whole system.For a single PV node,the lower layer control used the H infinity control algorithm to solve the problem of weak robustness.On the base of such a control strategy,the output powers of all the PV systems were of the same ratio compared to their maximum power,and the distributed multiple photovoltaic grid-connected system was kept stable.The feasibility of such a method is proved by simulation in Matlab.
photovoltaic grid-connected system;H infinity controller;ring communication structure;cooperative control;distributed control
TM464
A
2015-08-08
修改稿日期:2016-03-18
瞿丽(1991-),女,硕士研究生,Email:fwyang@ecust.edu.com