基于钻机遥控改造的钻爆堵一体化机器人设计
2016-10-21褚明杰张锋孟庆铸
褚明杰 张锋 孟庆铸
【摘要】针对山区地震抢险救援危险度高,抢险设备智能化程度低,工作效率差等问题设计了基于钻机遥控改造的集钻孔、封堵、爆破于一体的机器人系统,研究了钻机液压系统原理,综合视觉技术、无线通讯和遥操作等相关技术建立了系统的总体方案。
【关键词】地震抢险救援;机器人;钻机
Abstract: For Mountain Earthquake Rescue danger of high and low degree of intelligent emergency equipment, poor performance issues design rig remote control transformation set drilling, plugging, blasting in one of the robot system of drilling rig hydraulic system principle, comprehensive vision technology, no line communications and remote operation and other related technologies the overall scheme of the system is established based on.
Key words: earthquake rescue,robot,drilling machine
1、引言
目前,山区地震抢险救援中处理山石滑落封道的方法通常是采取人工操作鉆机对山石钻孔,人工装药并进行爆破。作业过程中经常伴有余震及山石二次滑落发生,严重危害救援人员的人身安全,且救援作业经常被打断,效率低下。所以建立一套安全、高效、智能的钻爆一体化机器人系统势在必行。本文在改造手动操作钻机的基础上应用了视觉技术、无线通讯及遥操作等相关技术,建立了集钻孔、封堵及爆破于一体的钻爆堵机器人系统。
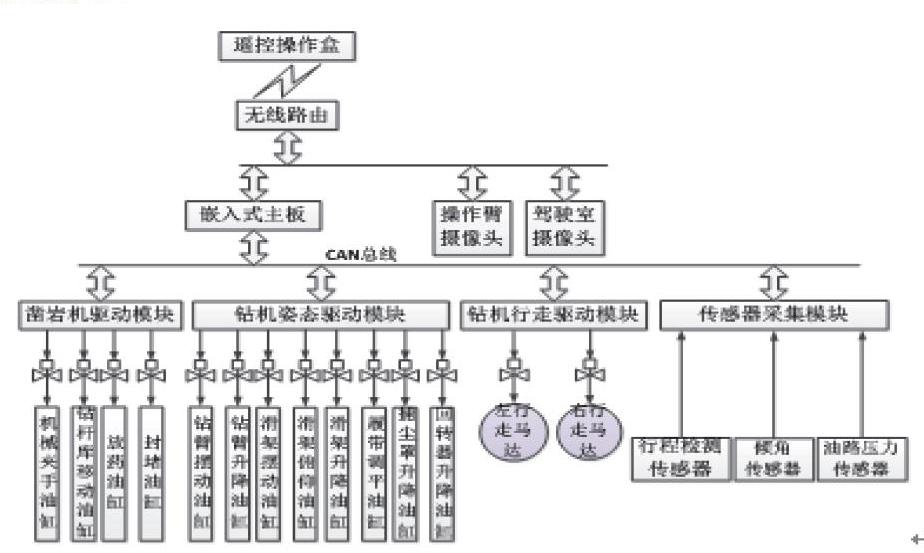
2、机器人总体方案设计
2.1总体方案 在全液压履带式钻机(以阿特拉斯D7型号为例)基础上进行遥控改造,增加装药与封堵机构及相应液压驱动装置,通过钻机的换杆机构更换放药装置及封堵装置,并通过摄像机来协助定位,完成整个钻孔、放药、封堵的工作流程。总体系统框架如图所示。
整个系统分为遥操作盒及车体控制系统两部分,遥操作盒与车体间通过工业级无线宽带设备点对点连接。车体控制系统分为主站控制器及从站控制器,主站控制器做为系统主控单元,接收遥操作指令并完成系统逻辑控制。从站控制器为系统执行单元,完成液压系统驱动及信号采集。主从站间通过CAN总线通讯。
考虑到应用环境对系统抗震性和稳定性的较高要求,从站控制器采用专为工程车辆开发的面向液压控制的控制器,此类控制器具有CAN接口,支持CANopen和SAE J1939协议。主站控制器由于需要具有视觉定位功能,需要有较高的处理能力,采用定制的基于X86架构的嵌入式主板。遥操作盒采用工程化设计,满足野外应用要求,带有操纵杆、旋钮开关、拨动开关及指示灯等。
2.2液压控制系统遥控改造方案 阿特拉斯D7钻机液压系统采用直控式控制系统,主要分为钻机行走系统、悬臂与推进梁定位系统、钻进操作系统、钻杆操作系统。
2.2.1钻机行走系统改造 原系统通过两个手柄分别控制两个手动先导阀,驱动液压马达主阀芯,实现液压马达控制,手柄可以控制行走速度和方向,可通过并联比例阀方式,实现行走遥控。2.2.2悬臂和推进梁定位系统改造 原系统悬臂及推进梁的定位控制,通过3个手柄控制手控液压阀直接控制速度和方向。可通过并联比例阀方式,实现悬臂与推进梁的定位遥控。2.2.3钻进操作系统改造 原系统通过集成的钻进手柄操作,实现钻机的旋转、推进及冲击控制。PLC采集手柄信号,经过适当的逻辑判断后输出控制电磁阀。该系统主要为开关量的输入及输出控制(液压及气压电磁阀控制)。可在遥控盒上并联手柄,采集输入信号,从站控制器经过逻辑处理后控制输出。2.2.4钻杆操作系统改造 集成钻机钻进操作以外的全部操作,如换杆接杆系统,点火开关、行进钻进切换、集尘器开关等功能。该系统一部分为PLC控制,还有一部分为开关直接控制。可在遥控盒上并联开关输入信号,从站控制器控制经过逻辑处理后控制输出。
3、机器人封堵技术研究
3.1钻孔自动识别及定位技术 遥控钻机钻孔后,需将雷管放置到钻好的孔中,具体方案是在机器人端增加图像识别与自动定位功能。相机采集钻孔的二维图像,并对钻孔的圆口进行特征点识别,计算出圆口的中心坐标点。将圆口的中心位置与摄相机视场的中心位置做比较,根据偏差量控制机械臂来移动注射机构。
3.2放药及封堵方案 设计机械接口与钻杆相同的PVC管及橡胶堵盖,将其预先置于钻杆库中,当钻孔工序完成后,通过换杆机构将装入炸药的PVC管顶端与滑架回转接头固定,然后进给PVC管,使其下移至钻孔处,当其部分插入钻孔后,使用上下夹杆器将PVC管与滑架回转接头脱离,松开夹杆器,使PVC管和炸药一同落入钻孔内。若PVC管不能可靠落入钻孔中,通过换管机构将一根钻杆与滑架回转接头固定,通过慢速推进钻杆,将PVC管推入钻孔内,完成放药工序。橡胶堵盖中间为大于钻孔孔径的圆盘结构,下部可塞入钻孔内进行封堵,上部通过接头采用螺纹连接方式连接钻杆,钻杆另一端连接滑架回转接头,实现可靠进给;进给到一定长度后,通过上下夹杆器和回转接头将钻杆与橡胶堵盖分离,完成封堵工序。
4、结论
本文通过对钻机原有液压系统进行分析后提出了遥控改造的实施方案并增加装药与封堵功能。采取视距内遥控操作方式,消除救援过程中对人员、设备的安全事故隐患和危害,解除工人繁重的劳动,有效地提高工作效率。
参考文献
[1]张为春,邹广德,高松.轮式工程车辆遥控操纵电液系统设计[J].山东交通学院学报.16/2-0032(2007)01-0059-04 .
