基于激光扫描测距技术的岸桥下集卡自动定位系统
2016-10-20许博
许博

岸桥是专业化集装箱码头的主要岸边作业机械,其作业效率和安全生产直接影响船舶装卸效率。为进一步提高岸桥作业效率,降低劳动强度,提高设备安全性,青岛前湾集装箱码头有限责任公司(以下简称青岛前湾码头)研发岸桥下集卡自动定位系统,丰富并完善岸桥应用系统。在岸桥作业过程中,当吊具从集卡上吊运集装箱或将集装箱放置到集卡上时,传统方法需要依靠集卡司机通过个人目测和前后反复移动集卡来完成集卡与吊具的对位。该对位方式降低集装箱装卸效率,增加司机的操作难度,同时会因吊具、集装箱与集卡间的碰撞造成设备损坏,从而带来诸多安全隐患。青岛前湾码头研发的岸桥下集卡自动定位系统采用激光扫描测距原理、模式识别和自动控制技术,实现集卡的精确对位,并根据作业类型及时提示集卡司机调整停车位置,以便集卡预先准确地停在岸桥起吊位置,达到减轻司机劳动强度、提高集装箱装卸效率的目的。
1 基于激光扫描测距技术的岸桥下集卡自动定位系统功能和技术指标
1.1 功能
(1)对岸桥下各条车道上作业的空载和重载集卡进行精确对位,以便集卡预先准确地停在岸桥起吊位置。
(2)自动识别各种箱型,包括单45英尺集装箱、单40英尺集装箱、单20英尺集装箱、双20英尺集装箱、罐式集装箱、液货集装箱和平板集装箱等。
(3)进行多车道测量,自动识别集卡车型及其行驶方向。
(4)采用发光二极管(Light Emitting Diode,LED)显示屏显示集卡定位信息,及时提示集卡司机调整停车位置,实现集卡向前、向后快速对位,并使作业区域亮度满足全天候作业的要求。
(5)在集卡未停到位的情况下,对吊具下降采用限制策略,以保证人车安全。
(6)为防止集卡拖拽吊具,在集卡完成对位后,LED显示屏提示集卡司机停止移动车辆;当岸桥完成装箱或卸箱操作且吊具起升到一定高度后,LED显示屏提示集卡司机驶离操作区域。
1.2 主要技术指标
激光检测距离为30 m;激光测量误差为;集卡对位误差小于100 mm;工作温度为 30~50癈;存储温度为 30~70癈;湿度为100%;防护等级为室外IP65。
2 基于激光扫描测距技术的岸桥下集卡自动定位系统构架及工作原理
2.1 构架
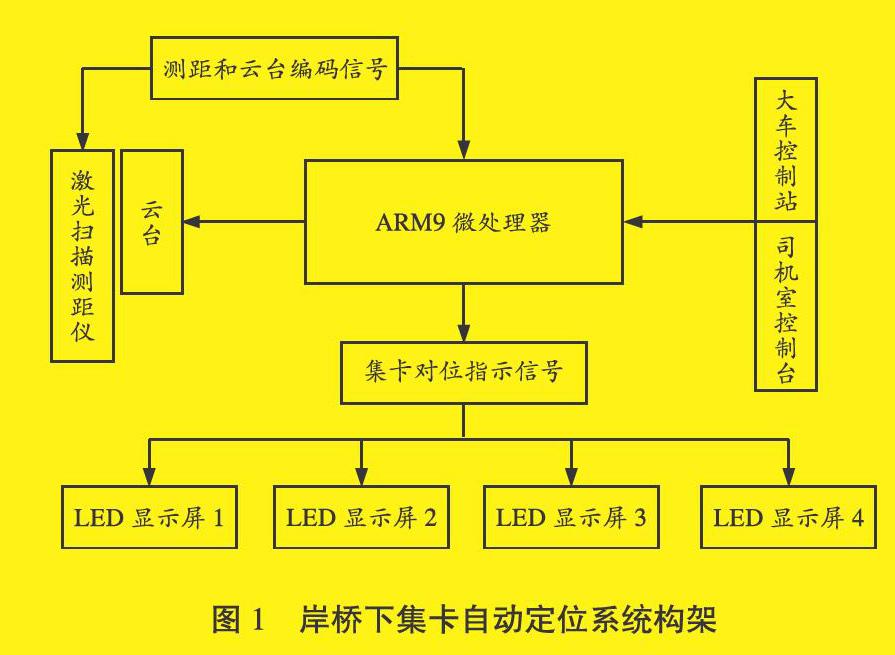
基于激光扫描测距技术的岸桥下集卡自动定位系统的主要设备包含旋转云台、激光扫描测距仪、系统控制器、LED显示屏等(见图1),其中,系统控制器上部署集卡对位控制软件。这些设备与岸桥上原有的可编程逻辑控制器(Programmable Logic Controller,PLC)系统、司机室控制台和功能启停选择开关共同实现系统功能。
岸桥司机通过操作台按钮实现对车道的选择和系统的设置,设置信息主要包括岸桥下集装箱起吊作业车道、作业类型等。系统控制器通过与PLC以PROFIBUS-DP总线接口的方式获取当前作业的吊具操作模式、作业类型等。为方便岸桥边作业人员调整集卡作业车道,在岸桥下设置与系统控制器相连的车道调整开关,以便对云台进行调整。激光扫描测距仪将数据发送至系统控制器,系统控制器据此识别集卡的行驶方向、位置及其偏离岸桥基准起吊点的距离;同时,系统控制器从PLC获取吊具操作模式、开闭锁信号和起升高度等信息,并将集卡偏离岸桥起吊点的方向和距离、作业车道、操作模式、行驶方向等信息实时显示在LED显示屏上,提示司机调整集卡停车位置,对准岸桥起吊点。如果集卡向后偏离岸桥吊具起吊点的距离大于安全距离,系统禁止吊具下放,以保护人车安全;当系统收到开闭锁信号且吊具起升至一定高度时,LED显示屏提示集卡司机驶离,以防止集卡拖拽吊具。
2.2 工作原理
2.2.1 激光扫描测距原理
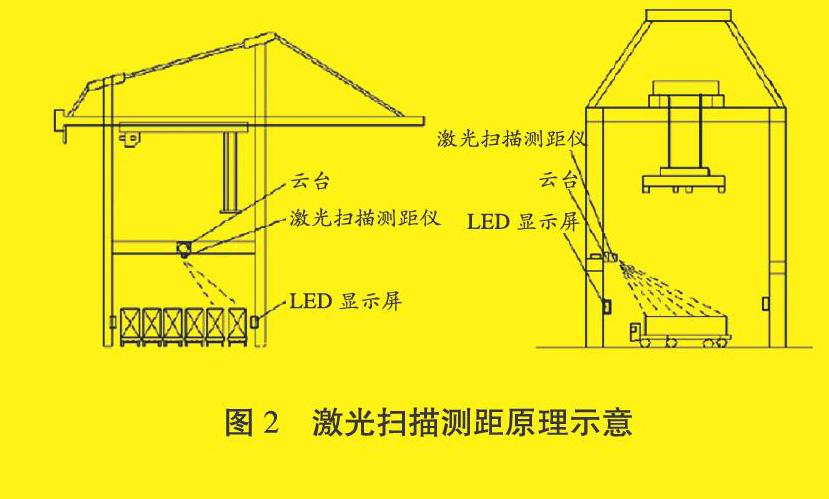
在集卡车道上方的岸桥横梁中部安装可编程控制转动角度的云台,该云台在岸桥横梁下垂直于集卡车道的平面内旋转;在云台上安装1台激光扫描测距仪,激光沿平行于集卡车道中心线的方向对集装箱及集卡平板车顶面立体扫描测距;激光扫描测距仪跟随云台转动,实现对岸桥下6条集卡车道的扫描测距(见图2)。激光扫描测距仪测得从扫描测距点到码头地面的垂直高度及从测距点到岸桥起吊点中心的距离,同时设定车道测距范围,将初始设定的数据储存在系统控制器内的ARM9微处理器中。当激光扫描测距仪对集卡车道进行测距时,微处理器控制云台旋转角度,云台带动激光扫描测距仪旋转扫描车道上的物体,并通过微处理器的计算,得到被测物体的高度及其与测距点的距离。通过微处理器的计算和分析,系统识别出所测集卡和集装箱的形状,判断集卡的位置及其偏离岸桥基准起吊点的距离,同时将集卡偏离岸桥起吊点的数据显示在LED显示屏上,以便集卡司机调整集卡停车位置。
2.2.2 LED显示屏对位显示原理
LED显示屏通过安装支架固定在岸桥海侧和陆侧基础梁前后,距地面高度约3 m,屏幕中心高度与集卡司机视线高度一致。LED显示屏采用红色、黄色、绿色3种颜色显示,分为5个显示区域(见图3):操作模式用红色和绿色显示,绿色为单20英尺集装箱作业模式,红色为双20英尺集装箱、40英尺集装箱和45英尺集装箱作业模式;集卡行驶方向用红色显示;集卡对位方向“向前”和“向后”用绿色箭头显示,对位后用红色表示停止,驶离时用绿色显示;当前扫描作业车道号用黄色显示;集卡对位偏离距离用红色显示,单位为厘米。
2.2.2.1 集卡对位方向
集卡对位方向采用红色和绿色显示:当系统控制器识别出操作区域内有集卡进入时,对应的对位方向显示为绿色箭头;当集卡调整到位后,显示为红色横杠,此时禁止集卡移动;当岸桥完成装箱或卸箱操作后,显示为绿色横杠,提示集卡可以驶离操作区域。
2.2.2.2 集卡对位偏离距离
集卡对位偏离距离显示为红色,显示范围为“000”至“299”,单位为厘米,该区域表示集卡当前位置与正确的停车位置之间的距离。当集卡停车到位时显示“000”;当岸桥完成卸箱或装箱操作时,显示为“---”,此时允许集卡驶离操作区域;当操作区域内没有集卡进入时,也显示为“---”。
2.2.3 激光扫描测距定位过程
激光立体扫描可以对岸桥下6条车道进行集装箱测距定位。首先,选择扫描的车道,步进电机转动使得激光扫描测距仪锁定在当前车道;然后,判断集卡的行驶方向及车头位置。当扫描测距系统测得单40英尺集装箱或单20英尺集装箱时,微处理器控制系统根据集装箱中心位置判断定位;当扫描测距系统测得40英尺集装箱或前后装载2个20英尺集装箱时,为区分这2种集卡装载状态,系统根据集卡行驶状态及测得的数据进行分析,判断集卡装载状况,确定集卡停车位置。当集卡装载前后2个20英尺集装箱分别起吊时,按照集装箱装卸工艺,集卡先进入前载20英尺集装箱测距范围,前载20英尺集装箱定位起吊后,系统判断后载20英尺集装箱中心位置并自动定位。当双箱吊具同时起吊集卡装载的前后2个20英尺集装箱时,测距定位过程与40英尺集装箱大致相同。岸桥下空载集卡测距定位判断方法与重载集卡相同。空载集卡平板车有大梁和横梁,激光测到的数据不在同一平面上,可以通过图形扫描和程序算法判断平板车上的基准点进行测距定位。
3 基于激光扫描测距技术的岸桥下集卡自动定位系统安全防护功能
3.1 防止吊具误砸集卡和司机
在岸桥作业过程中,岸桥司机需要经常切换吊具操作模式。当吊具操作模式从单20英尺集装箱作业切换到40英尺集装箱作业时,若集卡司机未注意到吊具模式已切换,仍将集卡停在前载20英尺集装箱作业位置,同时岸桥司机由于视线被遮挡而未注意到下方集卡未停到位,继续下放吊具,则会造成安全事故。此外,若集卡司机未停车到位或停车到位后未拉起手刹,则集卡可能在风力影响下移动,从而造成安全事故。
为防止在集卡未停到位的情况下吊具下放误砸集卡和司机,系统通过激光扫描测距仪实时检测集卡偏离距离,并从PLC获取开闭锁信号及吊具起升高度,以便当集卡偏离距离大于安全距离时,对吊具下降采用限制策略,从而保证人车安全。系统对每次防护进行记录,以便事后查找和分析问题。
3.2 防止集卡拖拽吊具
在岸桥作业过程中,吊具空载或重载起升至一定高度后,才允许集卡从岸桥下驶离。集卡司机一般通过目测判断吊具是否已升至安全高度,其弊端为:集卡司机经常仅凭经验驾驶集卡,加之通过集卡后视镜观察存在一定误差,容易使司机误判,导致集卡司机在吊具未完全脱离集装箱或集装箱未完全脱离集卡的情况下开动集卡,引起岸桥吊具锁头被拉坏、起升钢丝绳损坏等事故。
为防止集卡拖拽吊具,在集卡完成对位后,系统通过LED显示屏提示集卡停止移动;同时,系统实时从PLC获取开闭锁和吊具起升高度信息,当岸桥完成装箱操作(即系统检测到开锁信号)且吊具起升高度达到5.5 m时,LED显示屏提示集卡司机驶离操作区域。卸箱操作安全防护与装箱操作类似,当吊具由空载变为重载且吊具起升高度达到时,LED显示屏提示集卡司机驶离操作区域。
4 基于激光扫描测距技术的岸桥下集卡自动定位系统应用效果
4.1 消除不安全因素
基于激光扫描测距技术的岸桥下集卡自动定位系统实现集卡的准确对位,使岸桥司机通过LED显示屏掌握集卡停车位置,从而能够一次性起吊集装箱,减少吊具与集装箱及集装箱与集卡之间的撞击,确保作业安全。
4.2 减轻集卡和岸桥司机劳动强度
在传统岸桥作业模式下,集卡司机需要目测吊具起吊点,反复调整和移动集卡;在集卡自动定位系统作业模式下,集卡司机只须查看对位数据便能实现集卡与岸桥的一次性准确对位,大大减轻劳动强度。
4.3 提高集装箱装卸效率
根据统计分析,在同岸桥、同司机的情况下,从吊具下降至车道上方岸桥横梁抓取40英尺集装箱,到吊具起吊集装箱过岸桥横梁,采用集卡自动定位系统的岸桥完成该过程的平均时间是,而未采用集卡自动定位系统的岸桥完成该过程的平均时间是,前者比后者节约时间。按岸桥装卸效率/h计算,基于激光扫描测距技术的集卡自动定位系统使集装箱装卸效率提高9.84%。
4.4 提升经济效益
(1)提高效率,增加收入。集卡自动定位系统的应用使码头集装箱装卸效率提升9.84%,按码头年作业箱量800万TEU计算,可增加作业箱量 78.72万TEU;按收入(扣除成本) 200元/TEU计算,每年可增收万元。
(2)节约能耗,减少成本支出。在传统岸桥作业模式下,吊具与集装箱平均对位 2 次。集卡自动定位系统的应用减少岸桥吊具重复对位次数,按吊具单次起升或下降耗电及电费0.8元/kW计算,可节省电费0.28元/TEU;按码头年作业箱量800万TEU计算,可节约电费224万元/年。
5 结束语
基于激光扫描测距技术的岸桥下集卡自动定位系统的应用不仅有利于提高集装箱码头人机交互作业安全性,而且能降低岸桥和集卡司机的劳动强度,提高码头装卸效率,增加码头收入,减少能源消耗,降低生产成本,为集装箱码头带来一定经济效益和社会效益。目前,该集卡自动定位系统已成功应用于青岛前湾三期集装箱码头的5台岸桥上,并取得良好的应用效果。
(编辑:曹莉琼 收稿日期:2016-06-21)
