寄生式时栅传感器测量不确定度的分析与评定
2016-10-13杨洪涛章刘沙费业泰彭东林
杨洪涛 章刘沙 费业泰 彭东林
1.安徽理工大学,淮南,232001 2.合肥工业大学,合肥,2300093.重庆理工大学,重庆,400054
寄生式时栅传感器测量不确定度的分析与评定
杨洪涛1章刘沙1费业泰2彭东林3
1.安徽理工大学,淮南,2320012.合肥工业大学,合肥,2300093.重庆理工大学,重庆,400054
为了全面分析寄生式时栅误差和不确定度来源,提高寄生式时栅的测量精度,建立符合国际GUM规范检测结果的不确定度评定模型,以84对级的寄生式时栅为研究对象,根据其测量原理分析所测量角度的计算公式,进而将不确定度来源分为插补脉冲个数的误差、插补脉冲信号的量化误差、行波信号的周期误差和环境误差四大类,从理论上建立各不确定度分量之间的理论传递关系,应用现代不确定度理论,推导出合成测量不确定度计算公式。搭建实验平台,利用示波器等仪器的测量结果评定各不确定分量具体数值大小,计算被测角度的合成测量不确定度值。通过与寄生式时栅整圆周的实际测量误差相比较,可以看出利用该评定方法评定的传感器角度测量不确定度与实际误差相符,因此可以用于寄生式时栅传感器的实际评定。
寄生式时栅;不确定度分量;合成不确定度;评定;GUM规范
0 引言
寄生式时栅角位移传感器(简称寄生式时栅)是一种新型的测角传感器。目前国内研制的时栅传感器主要有场式时栅、变耦合系数时栅等。为了提高场式时栅和变耦合系数时栅测量精度,目前已经采用的误差分离与修正方法有:多测头分离周期性谐波法[1]、多面棱体和自准仪对示值误差的分离与评定方法[2]、谐波修正法[3]、时间序列法[4]以及采用高精度电源控制技术结合数字信号处理技术(digital signal processing,DSP)研究高精度驱动电源[5]等方法,新研制的寄生式时栅除应用了其中一些方法外,还利用自修正方法[6]进行误差分离与修正。但这些方法只是进行了误差修正,并没有从源头上分析误差来源,因此误差修正研究成果无法用于指导传感器的结构优化设计。另外在传感器研制过程中,缺乏从理论上分析寄生式时栅的误差和不确定度来源,从而无法建立符合国际GUM规范的时栅传感器不确定度评定体系。因此针对存在的上述问题,本文在寄生式时栅测角原理的基础上,全面分析寄生式时栅的不确定度来源,然后根据其来源建立各分量的评定方案,建立符合国际《测量不确定度评估指南》(guide to the expression of uncertainty in measurement,GUM)规范检测结果的寄生式时栅不确定度评定模型,并通过实验进行各不确定度分量的实际评定,并比较合成的不确定度结果与实际测量的传感器整圈测量误差数据,验证评定方案的正确性与有效性。
1 寄生式时栅结构与工作原理
与较为成熟的场式时栅[7]、变耦合系数时栅[8]采用整圈的定子线圈的结构不同,本文研究的寄生式时栅结构如图1a所示。它应用基于时空坐标转换原理的全新检测技术,利用沿圆周安装的离散定子线圈作为测头,由被检测的传动件如蜗轮、齿轮、轴承等代替原场式时栅中的转子,从而实现转子转过的角位移测量。它可以实现在大型、中空和被测对象限重等特殊条件下的角度测量,具有体积小、质量小、密封好、不怕振动冲击等优点。
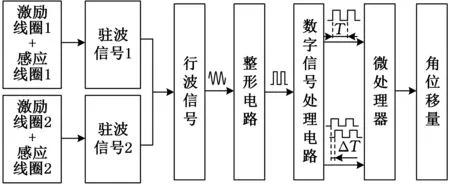
寄生式时栅的两路激励线圈和一路感应线圈分别绕制在测头上,其工作原理如图1b所示。在两路激励线圈中施加正交的正弦和余弦信号,如
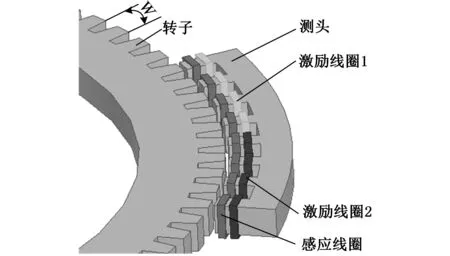
(a)结构图
(b)工作原理图1 寄生式时栅传感器的结构和工作原理
在感应线圈中感应出两路拍频驻波信号:
将这两路驻波叠加成电行波,合成的行波公式如下:
(1)
其中,A、U分别为激励信号和感应的驻波信号幅值,t为时间变量,T为激励信号的时间变化周期即行波信号的周期,x为转子与测头间相对转过一定角度时所处的位置,W为空间节距(一齿一槽)尺寸,即一个对级所对应的角度大小,如图1a结构图所示。将感应电行波信号与激励电源的一路参考信号同时送入数字信号处理电路,比较两路信号的相位,可得到反映转子角位移的两路信号相位差,并通过高频时钟脉冲插补计数,可实现相位差与时间差的转换。根据时空坐标转换原理,传感器测量的角位移θ可以表示为
(2)
式中,ΔT′为感应信号与参考信号的时间差;T为感应电行波信号的周期。
2 寄生式时栅测量不确定度分量分析及评定
根据寄生式时栅的测量原理[9-11],本文以84对级的寄生式时栅传感器为研究对象,分别对传感器的感应电信号和原始激励信号进行84分频,这样就能使测得的时间差和空间角位移达成一一对应的关系。根据上文的原理在数据处理模块中进行计算处理,式(2)可以表示为
(3)
式中,n为插补脉冲个数;Tb为插补脉冲信号周期。
从式(3)中可知,360°是圆周常量值,影响寄生式时栅测角不确定度的主要因素有:插补脉冲个数n,插补脉冲信号周期Tb,行波信号的周期T,因此寄生式时栅不确定来源主要分为四大类:插补脉冲个数n变化引起的误差,插补脉冲信号周期Tb变化引起的误差,行波信号周期T变化引起的误差和环境误差。下面分别进行上述不确定度分量的分析与评定。
2.1插补脉冲个数误差引起的不确定度评定
寄生式时栅是采用高频插补脉冲实现对电行波信号与标准参考信号相位差的计数的,相位差表示为插补脉冲个数与插补脉冲周期的乘积,插值脉冲个数可以表示为
(4)
由式(4)分析可知,插值脉冲个数的不确定度主要来源于两信号相位差φ和高频时钟脉冲周期Tb的误差。将相位差φ这个不确定分量记为u11,将高频时钟脉冲周期Tb这个不确定度分量记为u12,表示如下:
(5)
(6)
式(5)中的uφ是相位差φ引起的不确定度分量,它受到行波信号的初相位、信号宽度、零位误差等因素的影响,需要进一步作评定;式(6)中的uTb的误差受到晶振频率稳定性的影响,也需要作进一步分析。由于影响因素太多,无法从原理上进行评定,只能从观测信号上进行实际测量的评定。下面分别进行分析。
(1)相位差φ变化引起的脉冲个数n的不确定度分量评定。理想情况下,传感器动测头输出的行波信号应该是一个波形宽度为无穷小、过零点、稳定的标准正弦波。但是由于受定子和测头的圆度误差、跳动、偏心,绕组的不均匀分布等影响,实际产生的行波信号是波形具有一定宽度、过零点、上下波动的非标准正弦信号,因此行波信号与标准参考信号之间的相位差受到行波信号的过零点变化、信号宽度变化等导致初相位变化的影响,具有一定的变动,直接影响传感器测量精度。该相位差引起的不确定度可以利用高精度示波器直接测量行波信号与标准参考信号的相位差进行评定,测得相位差跳动范围记为ΔφDO,利用均匀分布进行评定,由式(5)可以得到相位差φ变化引起的不确定度分量为
(7)
(2)高频插补脉冲周期Tb变化引起脉冲个数n的不确定度分量评定。传感器行波信号与标准信号的相位差是由插补脉冲周期Tb与插补脉冲个数的乘积得到的,因此Tb的误差会引起脉冲个数的计算误差。高频时钟的周期Tb等于时钟电路的频率f的倒数,所以高频插补脉冲周期的误差来源于晶振频率的稳定性。环境因素、激励信号稳定性、负载变化、晶体发热老化等都是影响晶振频率稳定性的原因。对于集成式时钟电路,通过理论分析上述误差源太过复杂,本文采用高精度示波器多次测量f的方法完成对Tb的不确定度评定。设由上述误差源引起的时钟频率的误差为Δf,按均匀分布评定,脉冲周期Tb的不确定度uTb可以表示为
(8)
式中,uf为由时钟电路频率f引起的不确定度分量。
则插补脉冲信号周期Tb的误差引起脉冲个数n的不确定度分量u12可以表示为
(9)
综上,对插值脉冲个数n变化引起的不确定度分量进行合成,记由n的误差引起角度Tb的不确定度分量为u1,合成的表达式如下:
(10)
2.2插补脉冲信号量化误差引起的不确定度评定
寄生式时栅传感器采用的是高频时钟插补技术来实现对时间间隔(相位差)的数字化测量的。但当高频插补脉冲对两相信号的相位差进行计数时,由于相位差不可能总是插补脉冲周期的整数倍,因此存在着相位差的量化误差,进而产生传感器的测量不确定度。该量化误差大小取决于插补脉冲信号周期Tb。
(11)
2.3行波信号周期变化引起的误差评定
寄生式时栅传感器行波信号是通过时空正交的两列驻波叠加形成的,驻波信号的时间正交通过激励信号的时间正交性来保证,空间正交通过机械加工和空间绕线相配合实现。在测头的实际加工中,由于采用多匝线圈绕组,故两组激励绕组的绕制不可能完全一致。同时输入的信号是特定的精密正交激励电源,如果激励电源不够稳定,其电源的幅值、频率、相位不等,发生变动,那么这些原因都会导致行波信号周期的变化。通过理论分析各误差源的影响太复杂,为了简化评定过程,本文采用高精度示波器直接测量激励信号周期的方法进行评定,设测量得到激励信号的周期误差为ΔTe,按均匀分布,行波信号周期变化引起的周期不确定度分量为
(12)
设行波信号周期T的误差引起角度θ测量不确定度分量为u3,根据式(3),可得到行波电场周期误差引起角度的测量不确定度分量u3计算公式为
(13)
2.4环境变化引起的误差评定
传感器的环境误差主要由工作环境温度、湿度等因素变化引起。环境温度和湿度的变化会引起定转子几何尺寸的变化、测量零点的漂移和电阻值的变化等,进而导致传感器产生测量误差。设环境变化引起的角度测量误差为φe,按均匀分布进行评定,则温度变化引起角度的不确定度分量为
(14)
2.5测量不确定度合成及评定结果分析
将上述各个不确定度分量的分析结果进行合成,则寄生式时栅的角度合成测量不确定度可表示为
(15)
通过式(15)计算,就可得到寄生式时栅传感器的合成测量不确定度,完成对寄生式时栅的测量不确定度实际评定。根据上述分析结果,寄生式时栅传感器的不确定度分量可总结为表1所示的结果。

表1 寄生式时栅测量不确定度分量表
3 实验验证
3.1寄生式时栅实际测量误差分离实验
为了验证上述评定方案的正确性,本文搭建了寄生式时栅不确定度评定验证实验装置进行寄生式时栅测量误差分离实验,实际测量整周角度测量误差用于后续的实际评定结果比对,验证评定结果。实验装置由未进行误差软件补偿的84对级的寄生式时栅原机(未经过信号处理和误差补偿)、高精度的海德汉圆光栅(分辨能力为±1″)、精密分度转台、电机、数据采集系统和上位机组成。将时栅和圆光栅通过同心轴系安装在精密分度转台的主轴上,电机通过蜗轮蜗杆传动带动分度转台做匀速运动。将圆光栅作为角度测量基准,时栅和光栅按照相同的采样周期进行同步采样,两者比较得到寄生式时栅的角度测量误差,由上位机实时显示时栅、光栅测量值和测量误差曲线图。本验证实验是在一个地下洁净恒温实验室进行的,实验室保持恒温19 ℃,避免因环境温度、湿度的变化引起测量误差。实验系统实物如图2所示。在电机的带动下,时栅和光栅从0°位置开始同步等间隔采集转过的角度数据并计算测量误差,转动一周后停止采样。采集到的时栅的整圈原始误差数据曲线如图3所示,图中纵坐标误差Δθ为传感器角度综合误差。从中可看出本文研究的寄生式时栅整圈实际测量误差峰峰值为1523″,误差具有一定规律性,可以进行精确建模进行补偿。
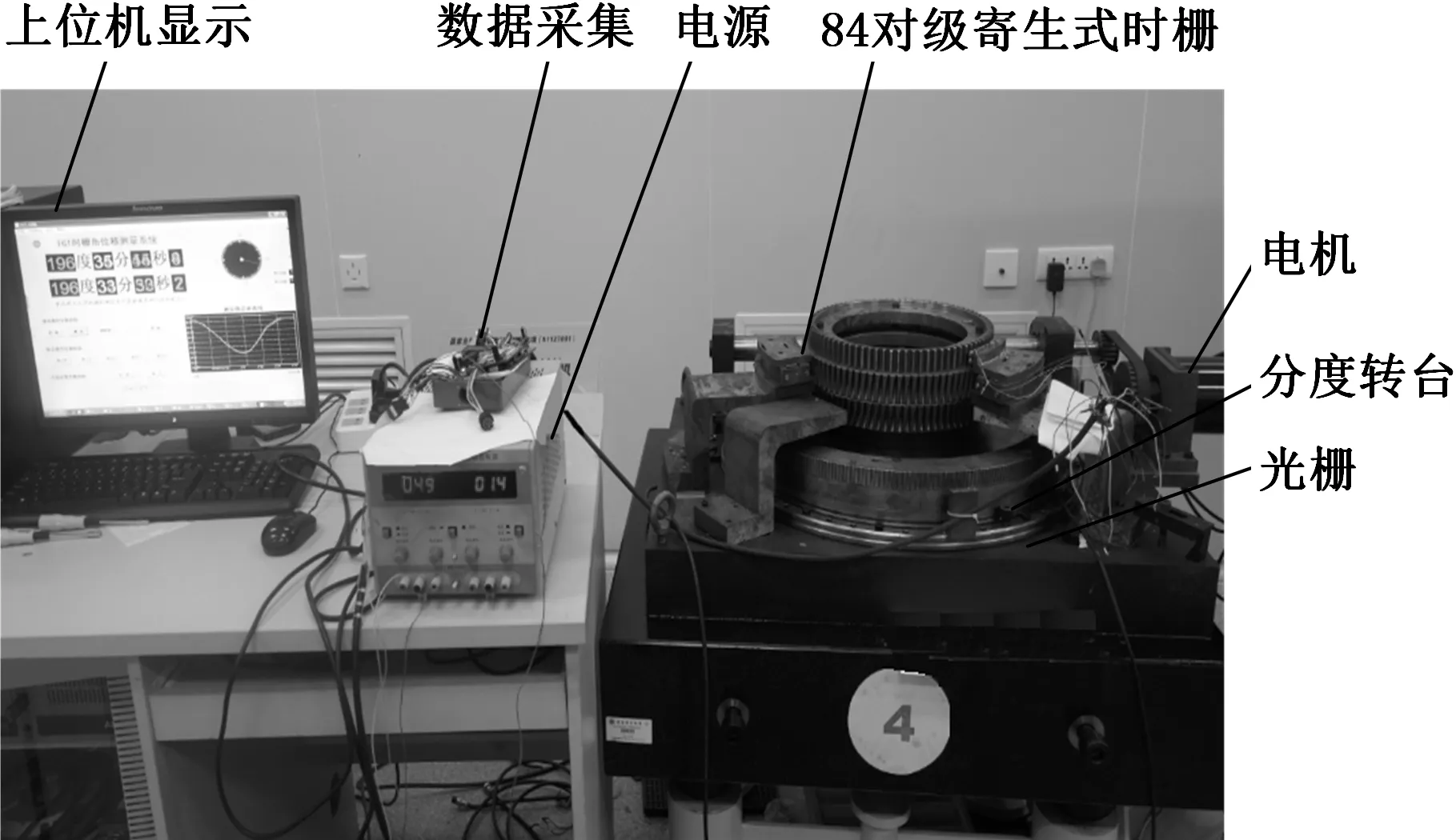
图2 实验系统实物图
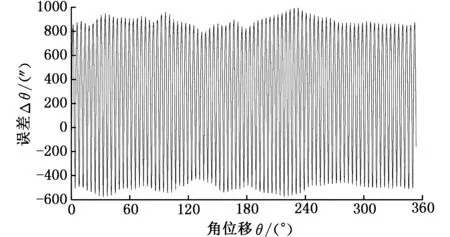
图3 整圈误差数据
3.2不确定度实际评定实验与数据处理
由上述不确定度来源及分量的理论分析结果,本文进行了各个不确定分量的实际评定实验和数据处理。
3.2.1插补脉冲个数n变化引起的不确定度分量评定
依据2.1节中插值脉冲个数的不确定度的评定公式可知,其待测量有相位差波动量ΔφDO和插补脉冲频率误差Δf,本文采用LeCory WaveJet-314A型高精度示波器对上述两个量分别进行测试与分析。该示波器带宽为100 MHz,采样率为1 GHz,4通道,捕获时间为500 μs,时基精度触发为0.001%。本文实验需要测量的最高频率的高频插补脉冲的频率为80 MHz,测量相位差需要两通道,因此本文所选示波器能够满足实验要求。
(1)相位差波动量ΔφDO引起的测量不确定度分量测量与评定。本文所应用示波器可以直接测量显示两路信号的相位差、周期、频率等数据,因此可用于测试标准参考信号(图4中的正弦波)和行波信号(图4中的方波,已经过整形)的相位差。

图4 动定测头信号示波器的测试结果
分别利用示波器采集寄生式时栅在四个不同测量位置时的标准参考信号与行波信号的100个相位差数据,所绘制相位差波动曲线如图5所示。
(a)位置1的相位差跳动
(b)位置2的相位差跳动
(c)位置3的相位差跳动
(d)位置4的相位差跳动图5 动定测头相位差跳动范围
从图5中可以看出,位置1的相位差跳动范围为4 μs,位置2的相位差跳动范围为6.3 μs,位置3的相位差跳动范围为9.5 μs,位置4的相位差跳动范围为10.1 μs,因此评定过程中取相位差跳动的最大值ΔφDO=10.1 μs进行该项不确定度分量评定。将该值代入评定公式(式(7))进行计算,得到:
(2)插补脉冲频率误差Δf引起的测量不确定度分量测量与评定。高频插补脉冲是通过晶振发出的,通过示波器测得的信号如图6a所示。采集一段时间内示波器测量的100个晶振数据,绘制高频晶振信号的频率变化曲线,如图6b所示,从图中可以确定高频晶振的频率变化范围Δf为
Δf=80.09-79.88=0.21 MHz
在评定过程中,相位差取理想情况下动定测头相位差的真值,由于真值不能通过实际测量获得,此处根据一段时间内相位差的最大值是行波信号的周期,即1/(384 Hz)=0.0026 s。相位差取平均值φ=(T-0)/2=0.0026 s/2=0.0013 s,代入式(9)得
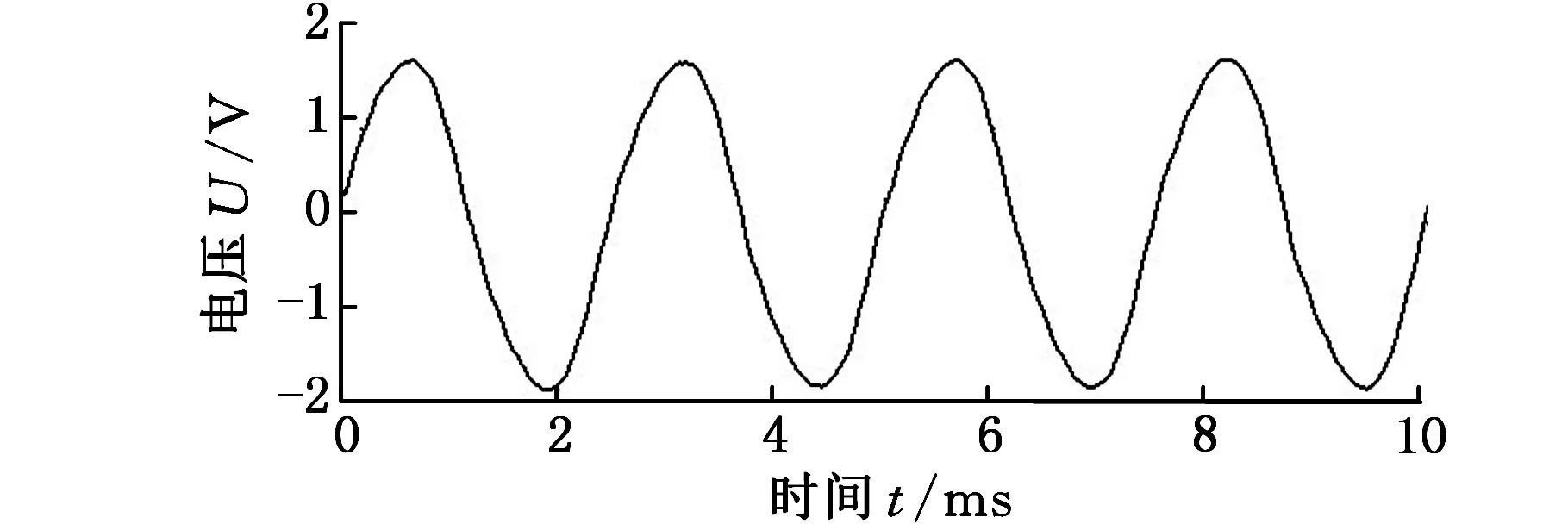
(a)示波器测试结果
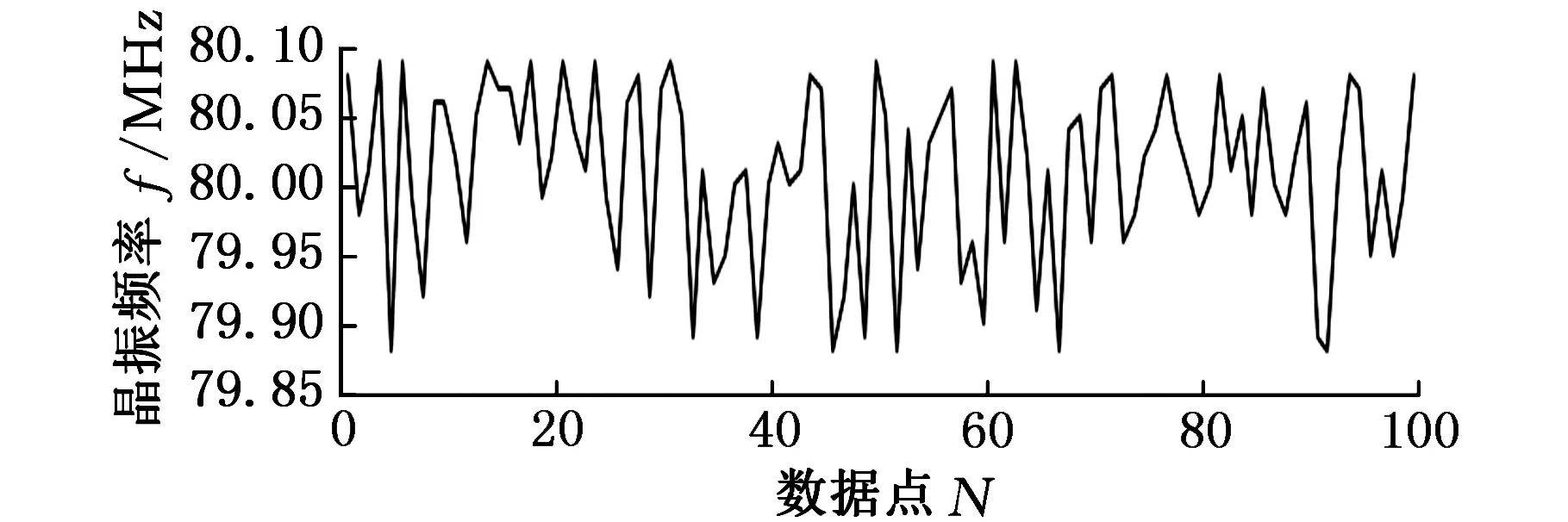
(b)高频晶振的频率测量数据图6 晶振高频脉冲信号示波器测试结果和测量数据
综合上文中对引起插值脉冲个数变化的各个不确定度分量进行合成,代入式(10),得到插值脉冲个数引起的角度测量不确定度分量合成为
3.2.2高频插补脉冲信号量化误差引起的测量不确定度分量评定
本次实验采用的是84对级的寄生式时栅传感器,电源频率是384 Hz,高频的晶振是80 MHz,将这些参数代入式(11)中,可以计算得到插补脉冲信号量化误差引起角度θ的不确定度分量u2的值为
3.2.3行波信号周期误差引起的测量不确定度分量测量与评定
利用示波器采集一段时间内的行波信号100个周期波动值,绘制的周期变化曲线如图7所示,从图中可以确定行波周期信号的变化范围ΔTe为
ΔTe=2.601-2.6=0.001(ms)
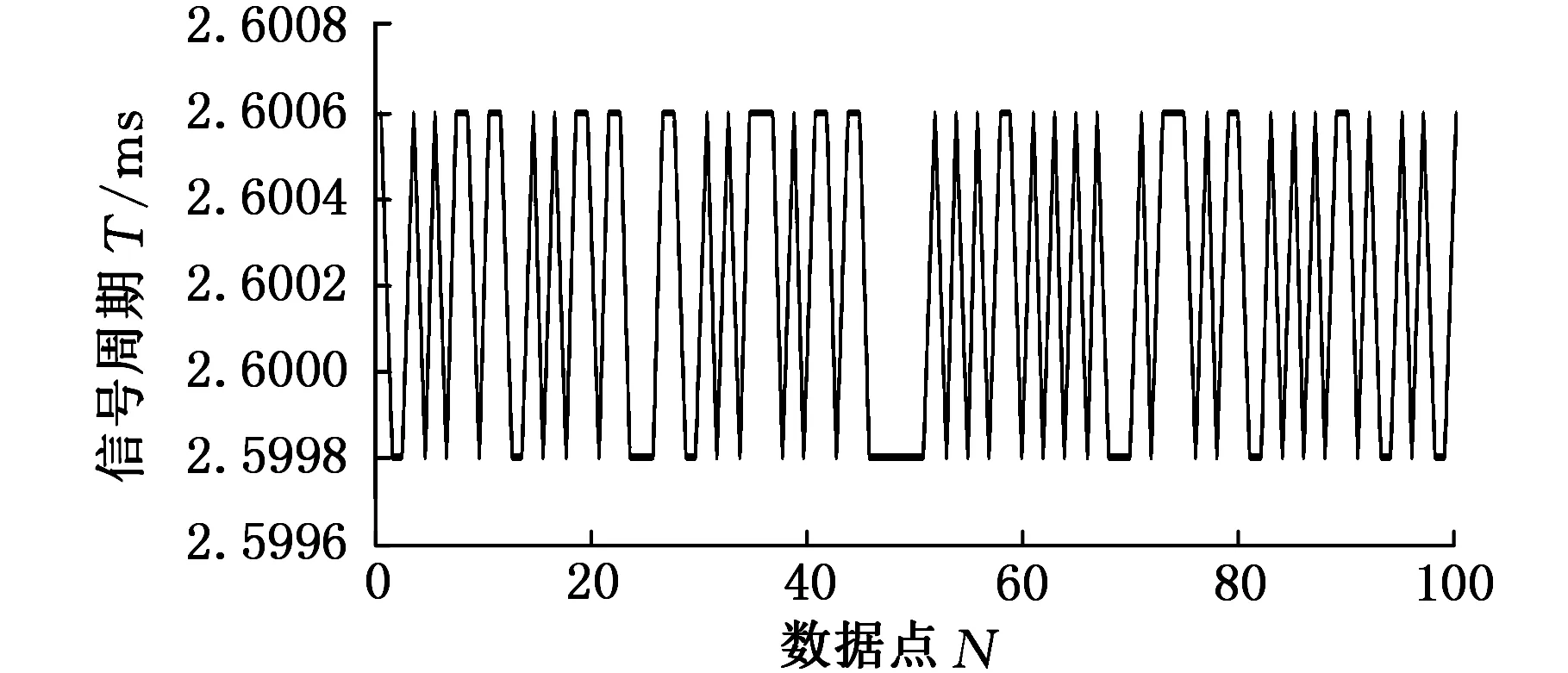
图7 行波信号周期的跳动范围
因此行波信号周期T变化引起角度θ的不确定度分量为
3.2.4环境误差引起的测量不确定度分量评定
由于本次实验是在地下洁净恒温实验室开展的,整个实验设备安装在花岗石隔振平台上,避免了环境温度、湿度变化、振动等因素对传感器测量精度的影响,因此可以确定环境误差引起的测量不确定度分量为
u4=0
3.2.5不确定度合成与分析
依据不确定度合成公式(式(15)),合成不确定度:
从3.1节寄生式时栅传感器的实际测量误差结果可知,其实际误差的峰峰值为1523″,与本文所建立的不确定度评定体系评定的测量不确定度评定结果1533.3″基本相符,因此评定结果符合传感器的实际误差分布情况。另从评定过程及结果中可以看出,对测量不确定度影响最大的不确定度分量是u1,即插补脉冲个数对测角精度的影响,要提高传感器测量精度,必须进一步对该分量进行产生机理分析与建模修正。
4 结语
本文在分析寄生式时栅角位移传感器工作原理的基础上,根据其测角表达式确定了各不确定度来源,主要包括插补脉冲个数变化、插补脉冲信号量化误差、行波信号周期误差和环境误差四个方面,推导了各分量的传递关系和合成不确定度的计算公式,并搭建了实验平台进行了各不确定度分量的评定实验和实际评定。同时将评定结果与传感器实际测量误差进行比较,可知两者相符,因此本文所建立的寄生式时栅不确定度评定体系可以用于该传感器的实际评定,并符合GUM规范。在评定过程中可以看出插补脉冲个数是最大的不确定度来源,因此有必要在后续研究中对该分量进行进一步分析,用于指导传感器的结构优化设计。同时可以看出寄生式时栅各误差具有一定的变化规律,可以建立精确的误差修正模型进行修正。
[1]彭东林, 周玮, 陈锡侯. 时栅位移传感器的误差修正实用技术[J]. 机械传动, 2012, 36(4):34-36.
PengDonglin,ZhouWei,ChenXihou.PracticalTechnologyofErrorCorrectionforTimeGratingDisplacementSensor[J].MechanicalDrive, 2012, 36(4):34-36.
[2]郑方燕, 郑永. 时栅位移传感器示值误差测量不确定度分析与评定[J]. 计量与测试技术, 2008, 35(2):35-38.
ZhengFangyan,ZhengYong.Analysis&EvaluationofUncertainlyaboutIndicationofTime-gratingDisplacementSensor[J].Metrology&MeasurementTechnique, 2008, 35(2):35-38.
[3]彭东林, 刘小康, 张兴红,等. 基于谐波修正法的高精度时栅位移传感器[J]. 仪器仪表学报,2006, 27(1):31-33.
PengDonglin,LiuXiaokang,ZhangXinghong,etal.High-precisionTime-gratingDisplacementSensorBasedonHarmonicWaveCorrectingMethod[J].ChineseJournalofScientificInstrument, 2006, 27(1):31-33.
[4]陈自然, 彭东林, 刘小康,等. 基于时间序列的时栅数控转台动态建模研究[J]. 中国机械工程, 2011, 22(23):2853-2857.
ChenZiran,PengDonglin,LiuXiaokang,etal.DynamicModelingforTimeGratingCNCRotaryTableBasedonTimeSeries[J].ChinaMechanicalEngineering, 2011, 22(23):2853-2857.
[5]杨继森, 陈锡侯, 万文略,等. 时栅位移传感器高精度驱动电源研究与设计[J]. 仪表技术与传感器, 2010(10):5-7.
YangJisen,ChenXihou,WanWenlue,etal.StudyandDesignofDrivingPowerofTimeGratingDisplacementSensor[J].InstrumentTechniqueandSensor, 2010(10):5-7.
[6]高忠华, 陈锡候, 彭东林,等. 时栅传感器动态自动测试与标定系统[J]. 仪表技术与传感器, 2010(2):95-97.
GaoZhonghua,ChenXihou,PengDonglin,etal.DynamicAutomaticTestingandCalibrationSystemofTimeGratingSensor[J].InstrumentTechniqueandSensor, 2010(2):95-97.
[7]彭东林, 刘小康, 张兴红,等. 高精度时栅位移传感器研究[J]. 机械工程学报, 2005, 41(12):126-129.
PengDonglin,LiuXiaokang,ZhangXinghong,etal.ResearchonHigh-precisionTime-gratingDisplacementSensor[J].ChineseJournalofMechanicalEngineering, 2005, 41(12):126-129.
[8]彭东林, 汤其富, 陈锡侯,等. 变耦合系数型时栅位移传感器后期处理新方法[J]. 仪器仪表学报, 2012,32(11):28-30.
PengDonglin,TangQifu,ChenXihou,etal.NewMethodofPostprocessinginTime-gratingwithVariableCoefficient[J].InstrumentTechniqueandSensor, 2012,32(11):28-30.
[9]彭东林, 李彦, 付闵,等. 用于极端和特殊条件下机械传动误差检测的寄生式时栅研究[J]. 仪器仪表学报, 2013, 34(2):359-364.
PengDonglin,LiYan,FuMin,etal.StudyonParasiticTimeGratingSensorsUsedforMechanicalTransmissionErrorMeasurementunderHarshandSpecialEnvironment[J].ChineseJournalofScientificInstrument, 2013, 34(2):359-364.
[10]WatanabeT,FujimotoH,NakayamaK,etal.AuthomaticHighPrecisionCalibrationSystemforAngleEn-coder[J].ProceedingsofSPIE, 2001,4401(1):267-274.
[11]WatanabeT,FujimotoH,MasudaT.Self-cali-bratableRotaryEncoder[J].JournalofPhysics:ConferenceSeries, 2005,13(1):240-245.
(编辑王艳丽)
Analysis and Evaluation of Measurement Uncertainty Sources for Parasitic Time Grating Sensors
Yang Hongtao1Zhang Liusha1Fei Yetai2Peng Donglin3
1.Anhui University of Science and Technology,Huainan,Anhui,232001 2.Hefei University of Technology,Hefei,230009 3.Chongqing University of Technology,Chongqing,400054
In order to conduct systemic analyses of the error and uncertainty sources of parasitic time grating sensors, and to improve the measuring accuracy, a 84-level parasitic time grating was used as the research object to establish the uncertainty evaluation system which met the international GUM standard. The angle calculation formula was analyzed according to its measurement principles, and the uncertainty sources were divided into four categories which included errors of interpolation pulses, quantization errors of interpolation pulse signals, periodic errors of traveling wave signals and environmental errors. The theoretical transfer relationship among different uncertainty components were used to deduce the formula for the calculation of the synthetic measurement uncertainty according to the modern uncertainty theory. The experimental platform was built to measure the specific values of the uncertainty components by using the oscilloscope measurement result evaluation. And the synthetic measurement uncertainty of the parasitic time grating sensors was calculated by using the above specific value of the uncertainty components which was compared with the actual sensor measurement errors of the whole circumference. It may be seen that the uncertainty evaluation results by using the above built uncertainty evaluation method are consistent with the actual sensor errors. Therefore, it may be used in the practical evaluation of the parasitic time grating sensors.
parasitic time grating; uncertainty component; synthetic uncertainty; evaluation; GUM standard
2015-11-26
国家自然科学基金资助项目(51107001);重庆理工大学时栅传感及先进检测技术重庆市重点实验室开放课题资助项目(KFKT2013001)
TH712
10.3969/j.issn.1004-132X.2016.18.013
杨洪涛,男,1972年生。安徽理工大学机械工程学院教授。主要研究方向为精密测试技术、现代精度理论。发表论文40余篇。章刘沙,男,1991年生。安徽理工大学机械工程学院硕士研究生。费业泰,男,1934年生。合肥工业大学仪器科学与光电工程学院教授、博士研究生导师。彭东林,男,1952年生。重庆理工大学电子信息与自动化学院教授、博士研究生导师。
