Dynamic Modeling and Adaptive Fast Nonsingular Terminal SlidingMode Control for Satellite with Double Rotary Payloads
2016-09-05XuChenLuYupingYaoKemingLiuYanbinXiaoDibo
Xu Chen, Lu Yuping*, Yao Keming, Liu Yanbin, Xiao Dibo
1.College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, P.R. China;2.College of Electric and Information Engineering, Jiangsu University of Technology, Changzhou 213001, P.R. China
(Received 23 January 2015; revised 27 April 2015; accepted 29 April 2015)
Dynamic Modeling and Adaptive Fast Nonsingular Terminal SlidingMode Control for Satellite with Double Rotary Payloads
Xu Chen1, Lu Yuping1*, Yao Keming2, Liu Yanbin1, Xiao Dibo1
1.College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, P.R. China;2.College of Electric and Information Engineering, Jiangsu University of Technology, Changzhou 213001, P.R. China
(Received 23 January 2015; revised 27 April 2015; accepted 29 April 2015)
A robust attitude control methodology is proposed for satellite system with double rotary payloads. The dynamic model is built by the Newton-Euler method and then the dynamic interconnection between satellite′s main body and payloads is described precisely. A nonlinear disturbance observer is designed for satellite′s main body to estimate disturbance torque acted by motion of payloads. Meanwhile, the adaptive fast nonsingular terminal sliding-mode attitude stabilization controller is proposed for satellite′s main body to quicken convergence speed of state variables. Similarly, the adaptive fast nonsingular terminal sliding-mode attitude maneuver controller is designed for each payload to weaken the disturbance effect of motion of satellite′s main body. Simulation results verify the effectiveness of the proposed method.
satellite with double rotary payloads; multi-rigid-body system; sliding mode control; disturbance observer; attitude control
0 Introduction
Satellite often carries various of rotary payloads such as antenna or mobile crane to meet the application demand, and attitude control of this system has gained extensive interests in recent years, motivated by benefits in space application[1-6]. The motions of satellite′s main body and payloads act as disturbance to each other, thus increasing the difficulty of attitude control for both satellite′s main body and payloads. Therefore, dynamical coupling becomes a major problem of designing the attitude controller of such a multi-rigid-body satellite system, which requires a strong robustness. In Ref.[7], an active disturbance rejection controller (ADRC) is proposed to compensate the disturbances induced by solar array driving. In Ref.[8] the motor driving torque of antenna was calculated from a dynamical model and compensated by a satellite attitude controller based on the decoupling mechanism. In Ref.[9], residual disturbing torque of the rotary payload was calculated from a dynamic balance test. In Ref.[10] the robust gain-scheduled control was applied for spacecraft with mobile appendages, and the coupling torque was reckoned based on a dynamic model. However, the coupling torque is hard to acquire accurately in practice because some parameters such as motor current is difficult to measure. Besides, it is also hard to obtain coupling torque precisely based on calculation from dynamical model because of model uncertainty, or the state variables, such as attitude angle and angular velocity of payload due to electrical failure. When double rotary payloads work together, the coupling torque between satellite′s main body and payloads should be determined as possible as we can for high precision attitude control. Based on the consideration, the nonlinear disturbance observer is designed for satellite′s main body to estimate disturbance torque exerted by payloads′ motion in this work.
Sliding-mode control (SMC) has been widely used in many applications because of its strong robustness. Robotics, spacecraft control are some typical applications[11-12]. One of SMC is the terminal SMC[13], which can converge the control system in finite time. However, the singular problem limits the application in practice. Then, nonsingular terminal SMC[14]is proposed, which is able to avoid the singular problem completely. To achieve fast finite-time convergence, fast nonsingular terminal SMC[15-16]has been suggested recently. In Ref.[15], an adaptive nonsingular fast terminal SMC was proposed, containing an adaptive control term and a robust control term for electromechanical actuator. Ref.[16] investigated a nonsingular fast terminal SMC for a class of nonlinear dynamical systems. Therefore, we propose an adaptive fast nonsingular terminal SMC for satellite with double rotary payloads working simultaneously in this paper.
1 Dynamic Model of Satellite with Double Rotary Payloads
Dynamic model of satellite with double rotary payloads (Fig.1) is established by the Newton-Euler method in this section. The dynamic interconnection between satellite′s main body and the payloads is described accurately.
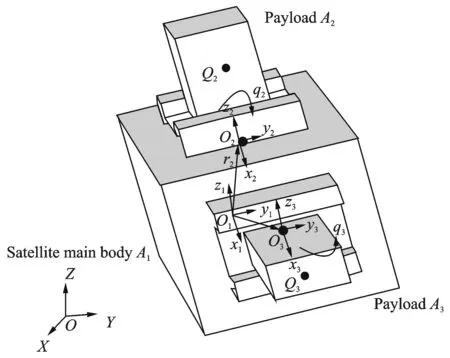
Fig.1 Satellite with double rotary payloads
For satellite′s main body A1shown in Fig.1, the kinematic equation is described in the coordinate O1x1y1z1as follows

(1)
where O1x1y1z1is the body-fixed coordinate of A1, whose origin is at the mass center of A1and axes are paralleled to the principal axes of inertia. q1=[φ1θ1ψ1]Tis the Euler attitude angle andω1=[ω1xω1yω1z]Tthe angular velocity.
The dynamic equations of A1described in the coordinate O1x1y1z1are
m1a1=F1
(2)
F1=-A12F2-A13F3
(3)
(4)

For the appendage A2, the kinematic equations are described in the coordinate O2x2y2z2.
(5)
(6)
(7)

Furthermore, the payload A2just rotates around the axis O2x2, which is a motion with one degree of freedom. We can obtain a simpler kinematic equation based on Eq.(5).
(8)

m2a2=F2
(9)
(10)
(11)
where J2=diag(J2x,J2y,J2z) is the inertia matrix of A2relative to O2, and T2=[T2xT2yT2z]Tthe control torque.
From Eqs.(6), (11), we have
(12)
Likewise, the motion of the payload A2just has a single degree of freedom. We can thus also deduce the simpler dynamic equation based on Eq.(11).

(13)


For appendage A3, the kinematic equations are described in the coordinate O3x3y3z3as follow
(14)
(15)
(16)
Furthermore, the payload A3just rotates around the axis O3z3to perform one degree of freedom motion. We can obtain the simpler kinematic equation based on Eq.(14).
(17)
m3a3=F3
(18)
(19)
(20)
where J3=diag(J3x,J3y,J3z) is the inertia matrix of A3and T3the control torque.
From Eqs.(15), (20), we get
(21)
Likewise, the payload A3just moves with a single DOF, so we can also gain the simpler dynamic equation based on Eq.(20)
(22)


(23)
Substituting Eqs.(3), (9), (10), (18), (19) into Eq.(2), it yields

(24)
Substituting Eqs.(6), (15) into Eq.(24), we get

(25)
where

Substituting Eqs.(6), (25) into Eq.(10), we obtain

(26)

(27)
Substituting Eqs.(26), (27) into Eq.(4), we get


(28)
Substituting Eqs.(12), (21) into Eq.(28), we can obtain
(29)
where








(30)
(31)
(32)
All state variables can be solved from Eqs.(29)—(32).
2 Controller Design of Satellite with Double Rotary Payloads
In this section, the nonlinear disturbance observer is designed for satellite′s main body to estimate and compensate disturbance torque acted by payloads′ motion, and the adaptive fast nonsingular terminal attitude stabilization SMC is designed for satellite′s main body. Meanwhile, the adaptive fast nonsingular terminal attitude maneuver SMC is planned for payloads′ attitude maneuver along the reference trajectory in same way.
2.1Nonlinear disturbance observer design
The main task in this subsection is to design disturbance observer for satellite′s main body A1to estimate the disturbance part -H1fj·fD1in Eq.(30). From Eq.(30), we have
(33)

(34)

(35)


(36)

2.2Nonsingular fast terminal attitude stabilization SMC design
The main task in this subsection is to design attitude stabilization controller for satellite′s main body A1.
The sliding surface is defined by[16]
(37)


where f1is the unknown upper bound of disturbance observer error.
For the system described by Eq.(30), the controller u1is designed as follows
(38)

and the adaptation update law is

Theme 1For satellite′s main body system Eq.(30), if the sliding surface is designed as Eq.(37) and the controller is defined as Eq.(38), then system Eq.(30) is in asymptotic stability.




(39)

To avoid chattering problem, u12can be changed into the following form
u12=
whereλis the small positive real number andλ≤1.
2.3Nonsingular fast terminal attitude maneuver SMC design
In this subsection we will design adaptive nonsingular fast terminal attitude maneuver SMC for payloads disturbed by motion of satellite′s main body.
The sliding surface is defined by[16]
(40)

Assumption 2The disturbance E2is assumed to be bounded and satisfy the following condition
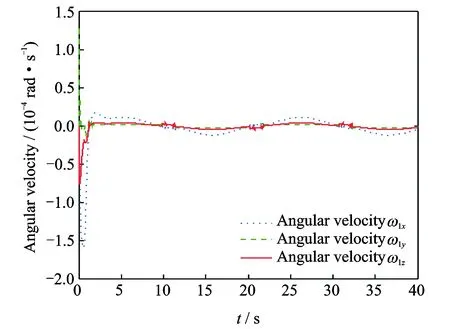
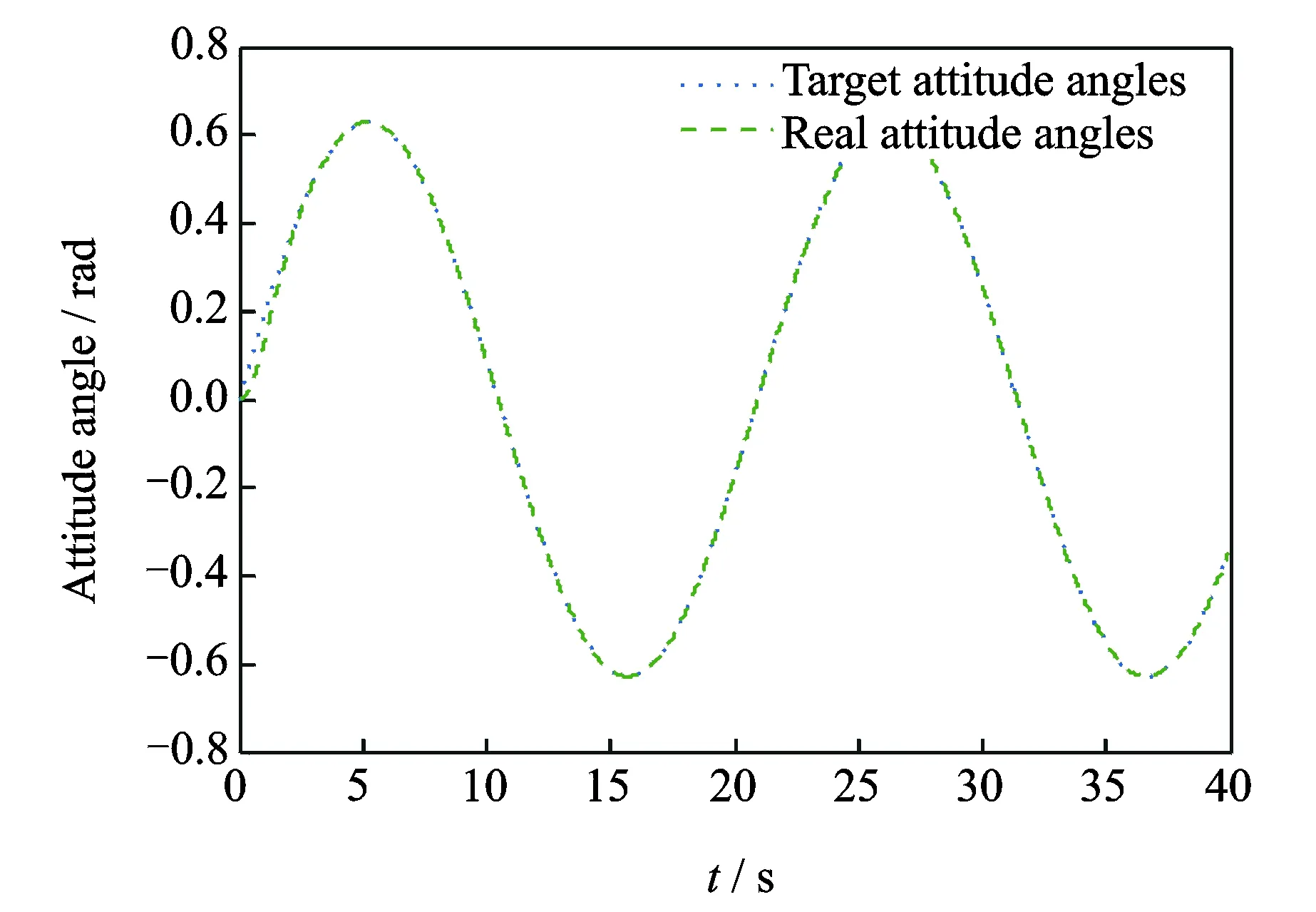
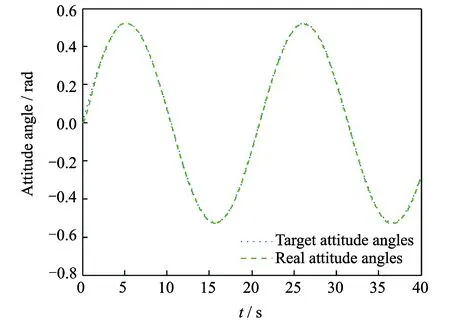
E2 In same way, the controller for A2is designed by (41) and the adaptation update law is Then Theme 2 is given. Theme 2For system Eq.(31), if the sliding surface is designed as Eq.(40) and the controller is defined as Eq.(41), then e21→0 and e22→0 when t→∞. The procedure to design attitude maneuver controller of payload A3is similar to A2, and we do not repeat it here for lack of space. To illustrate the effectiveness of the proposed method, we conduct simulations for satellite system with double rotary appendages in Matlab/Simulink environment. The main parameters are listed as follows. The inertia matrices of A1, A2and A3are J1=diag[97,83,76] kg ·m2,J2=diag[19,15,8] kg ·m2and J3=diag[16,18,9] kg ·m2. The mass of A1, A2and A3are m1=95 kg, m2=9 kg,m3=11 kg, r1=[0,0,0.2] m, r2=[0,0,0.6] m, r3=[0.6,0,0] m, r4=[0.15,0,0] m. For A1, the initial value of attitude angle is q1=[0,0,0]Trad. The parameters of disturbance observer are N1=diag[-8.669 9, -8.669 9,-8.669 9], N2=diag[-35.234 1,-35.234 1,-35.234 1], and of controller (38) are φ11=diag[2,2,2], φ12=diag[0.1,0.1,0.1], r11=5/3, r12=7/5, k1=1.2×[1,1,1]T,ρ0=0.01. Considering the actual situation, saturation function sat(·) is used instead of sign(·) to avoid the chattering problem in the controller Eq.(38). Simulation results are shown in Figs.2,3,4. Fig.3 Angular velocities of satellite′s main body A1 Fig.4 Control torques of satellite′s main body A1 Fig.5 Disturbance observer error 1 In Figs.2, 3, the Euler attitude angle and angular velocity of satellite′s main body A1are illustrated. From Fig.1, the control precision of attitude angle is about 2×10-4. Control accuracy of attitude angle will be improved when k1in Eq.(38) is enlarged, however, control torque will be also enlarged. The control torque is given in Fig.4. The observer error of disturbance torque acted on A1is shown in Fig.5, and we conclude that the disturbance observer designed in this paper is effective. For the payloads A2and A3, the inertia matrices are J2=diag[19,15,8] kg·m2and J=diag[16,18,9] kg·m2. The initial value of attitude angles are q2=q3=0 rad. The target attitude angles are q2d=π/5·sin(0.3t) and q3d=π/6·sin(0.3t). The control parameters are r21=r31=5/3, r22=r32=7/5,φ21=φ31=2,φ22=φ32=3 and k2=k3=2,ρ1=ρ2=0.003。 Fig.6 Attitude angles of payload A2 Fig.7 Attitude angles of payload A3 In Figs.6,7, the Euler attitude angles of payloads A2and A3are shown. We can obtain that the payloads A2andA3track target attitude angles accurately even when A1introduces a disturbance. The attitude control of satellite system with double rotary payloads is proposed in this paper. Firstly, system dynamic model is established by the Newton-Euler method so that the system dynamic interconnection is described accurately. Secondly, nonlinear disturbance observer is designed for satellite′s main body A1to estimate disturbance torque exerted by A2and A3and then compensated by the controller of A1. Meanwhile, the adaptive fast nonsingular terminal attitude stabilization SMC is proposed for A1, and the attitude of A1thus has a fast convergence speed. In same way, the adaptive fast nonsingular terminal attitude maneuver SMC controller is designed for each payload of A2and A3. Finally, simulation results prove the effectiveness of the proposed control strategy, thereby providing reference values in practice. Acknowledgements This work was supported by the National Natural Science Foundation of China (No.91016017), the Funding of Jiangsu Innovation Program for Graduate Education (No.CXZZ12_0160), the Natural Science Foundation of Jiangsu Province of China (No.BK20130234), and the Changzhou Sci. & Tech. Program (CE20145056). [1]TORAL M, STOCKLIN F, BAR-SERVER Y, et al. Extremely accurate on-orbit position accuracy using NASA′s tracking and data relay satellite system (TDRSS)[C]∥Proc of the 24thAIAA International Communications Satellite Systems Conference. [S.l.]: AIAA, 2006:1-9. [2]ZHANG S J, CAO X B. Coordinated attitude control for a tracking and data relay satellite with mobile antennas[J]. Aircraft Engineering and Aerospace technology: An international Journal, 2004,76(4):414-419. [3]FISHER J, VADALI S R. Gyroless attitude control of multibody satellites using an unscented Kalman filter[J]. Journal of Guidance Control and Dynamics,2008(31):245-251. [4]JING W X, XIA X W, GAO C S, et al. Attitude control for spacecraft with swinging large-scale payload[J]. Chinese Journal of Aeronautics, 2011,24(3):309-31. [5]ASHRAFIUO H, ERWIN R S. Sliding mode control of underactuated multibody systems and its applications to shape change control[J]. International Journal of Control, 2008,81(12):1849-1858. [6]QIAO B, LIU Z Y, HU B S, et al. Adaptive angular velocity tracking control of spacecraft with dynamic uncertainties[J]. Trans Nanjing Univ of Aero Astro, 2014,31(1):85-90. [7]SI Z H, LIU Y W. High accuracy and high stability attitude control of a satellite with a rotating solar array[J]. Journal of Astronautics, 2010,31(12):2697-2703. [8]GE S M, WANG L, GAN K L, et al. A method for decoupling control of satellite-borne large space antenna[J]. Journal of Astronautics, 2013,34(1):46-53. [9]XUE X B, ZHU H J, LÜ W, et al. Application research on dynamic balance control for spaceborne large-scale rotary payload[J]. Journal of Astronautics, 2012,33(8):1001-1005. [10]NAGASHIO T, KIDA T. Robust control of spacecraft with mobile payloads[J]. Transactions of the Japan Society for Aeronautical and Space Sciences, 2001,44(143):40-47. [11]CHUTIPHON P, PIMCHANA S. Nonsingular terminal sliding mode based finite-time control for spacecraft attitude tracking[J]. International Journal of Control, Automation and Systems, 2014,12(3):530-540. [12]VAN M, KANG H J, SUH Y S. Second order sliding mode-based output feedback tracking control for uncertain robot manipulators[J]. International Journal of Advanced Robotic Systems, 2013,10(16):1-9. [13]HUI L, LI J F. Terminal sliding mode control for spacecraft formation flying[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009,45(3):835-846. [14]JIN M, LEE J, CHANG PH, et al. Practical nonsingular terminal sliding-mode control of robot manipulators for high-accuracy tracking control[J]. IEEE Transactions on Industrial Electronics, 2009,56(9):3593-3601. [15]LI H, DOU L H, SU Z. Adaptive nonsingular fast terminal sliding mode control for electromechanical actuator[J]. International Journal of Systems Science, 2013,44(3):401-415. [16]YANG L, YANG J Y. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems[J]. International Journal of Robust and Nonlinear Control, 2011,21(16):1865-1879. [17]LIU L P, FU Z M, SONG X N. Sliding mode control with disturbance observer for a class of nonlinear systems[J]. International Journal of Automation and Computing, 2012,9(5):487-491. Mr. Xu Chen is a Ph.D. candidate in College of Astronautics, at Nanjing University of Aeronautics and Astronautics (NUAA). He received his first degree in NUAA. His research interests are spacecraft control. Dr. Lu Yuping is a professor in College of Astronautics, at NUAA. He received his master degree in NUAA. His research interests are spacecraft control, flight control. Dr. Yao Keming is a associate professor in College of Astronautics, at NUAA. He received his doctor degree in NUAA. His research interests are flight control. Dr. Liu Yanbin is an associate professor in College of Astronautics, at NUAA. He received his doctor degree in NUAA. His research interests are flight control. Mr. Xiao Dibo is a Ph.D. candidate in College of Astronautics, at NUAA. He received his first degree in NUAA. His research interests are flight control. (Executive Editor: Zhang Tong) , E-mail address: yplac@nuaa.edu.cn. How to cite this article: Xu Chen, Lu Yuping, Yao Keming, et al. Dynamic modeling and adaptive fast nonsingular terminal sliding mode control for satellite with double rotary payloads[J]. Trans. Nanjing Univ. Aero. Astro., 2016,33(3):310-318. http://dx.doi.org/10.16356/j.1005-1120.2016.03.310 V448.22Document code:AArticle ID:1005-1120(2016)03-0310-09






3 Simulations and Results



4 Conclusions
杂志排行

Transactions of Nanjing University of Aeronautics and Astronautics的其它文章
- Advances in Technologies of Piezoelectric Pumping with Valves
- Numerical Optimization on Aerodynamic/Stealth Characteristics of Airfoil Based on CFD/CEM Coupling Method
- Kinematic Calibration of Asymmetricly Actuated 6-DOF 3-PPPS Parallel Mechanism
- Kinematic Optimization of Bionic Shoulder Driven by PneumaticMuscle Actuators Based on Particle Swarm Optimization
- A Comprehensive Review on RNA-seq Data Analysis
- Joining Force of Heterogeneous Titanium Alloy in Linear Friction Welding Process