基于MATLAB的双闭环直流调速系统建模与仿真
2016-08-08刘胜前张烈平钟志贤
刘胜前,张烈平,孙 旋,钟志贤
(桂林理工大学 机械与控制工程学院,广西 桂林 541004)
基于MATLAB的双闭环直流调速系统建模与仿真
刘胜前,张烈平,孙旋,钟志贤
(桂林理工大学 机械与控制工程学院,广西 桂林541004)
摘要:结合转速、电流双闭环直流调速系统的系统结构和电路组成,使用仿真软件Simulink对双闭环直流调速系统电流环进行建模仿真。结果表明:阻尼系数越大,超调量越大,上升时间越短,当阻尼系数为0.5时,电流环性能达到最优。在电流环性能最优时:空载运行条件下,系统稳定转速随给定电压变小而变小;额定负载条件下,通过较长上升时间,达到额定转速。抗扰性检验表明,该系统抗扰性较强。
关键词:负反馈;双闭环;直流调速系统;Simulink
在生产和生活中, 各种电机的快速起动、 制动事关工业生产效率和人们的生活质量, 基于电力电子技术的不断发展, 对于调速系统的起动时间、制动响应等性能指标要求也越来越高。由于直流调速系统技术比较成熟, 多年以来一直是自动调速系统的主要形式, 普遍应用于冶金、 地质、 土建、 轻工业等领域[1]。相比开环调速系统, 闭环调速系统的各项性能指标更优[2]。如果对于系统的动态性能要求较高, 要求系统可以快速的起、制动, 尤其是在突然施加负载的情况下, 速降很小, 那么就需要应用转速、电流双闭环直流调速系统[3]。
1双闭环直流调速系统的数学建模
选取整流装置采用三相桥式电路由晶闸管供电的双闭环调速系统,基本参数如下:直流电动机, 220 V, 120 A, 1 000 r/min, 允许过载倍数λ=1.4; 晶闸管放大系数Ks=30; 电枢回路总电阻R=0.4 Ω; 时间常数Ti=0.023 s,Tm=0.2 s, 转速滤波环节时间常数Ton取0.01 s。
转速、电流双闭环调速系统的总体框架结构[4]及功能模块组成如图1所示。其中:内环代表电流环;外环代表转速环。

图1 双闭环直流调速系统总体结构Fig.1 General structure of double closed-loop DC speed regulating system
对于双闭环直流调速系统而言,设计要从内环即电流环开始[5]。在实际系统中,电流的超调量有严格的限制,所以电流环应该以随动性能为主。根据各环节的传递函数建立起来的电流环仿真数学模型如图2所示。
以转速、电流双闭环直流调速系统的各环节传递函数为基础,利用MATLAB软件的Simulink模块建立的双闭环调速系统整体模型如图3所示。

图2 电流环的仿真建模Fig.2 Current loop simulation modeling

图3 双闭环直流调速系统整体建模Fig.3 Double closed-loop DC speed regulating system modeling
2基于Simulink的电流环仿真研究
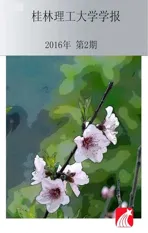
为了研究不同参数对电流的超调量和上升时间的影响,阻尼系数ζ分别取值0.25、0.39、0.50、0.69和1.0时,对电流环进行仿真得出波形并作出分析[6],如图4~8所示。其中,横坐标表示时间,单位为s;纵坐标表示电流,单位为A。
图4,当ζ=0.25时,波形电流无超调,上升时间长,σ=0,上升时间为0.042 s。
图5, 当ζ=0.39时, 有微小的电流超调量, 上升时间较长,σ=0.15%, 上升时间为0.022 s。
图6,当ζ=0.50时,有部分超调量,上升时间较短。σ=4.3%,上升时间约为0.012 s。
图7,当ζ=0.69时,超调量比较大,上升时间短,σ=9.5%,上升时间大约为0.008 s。
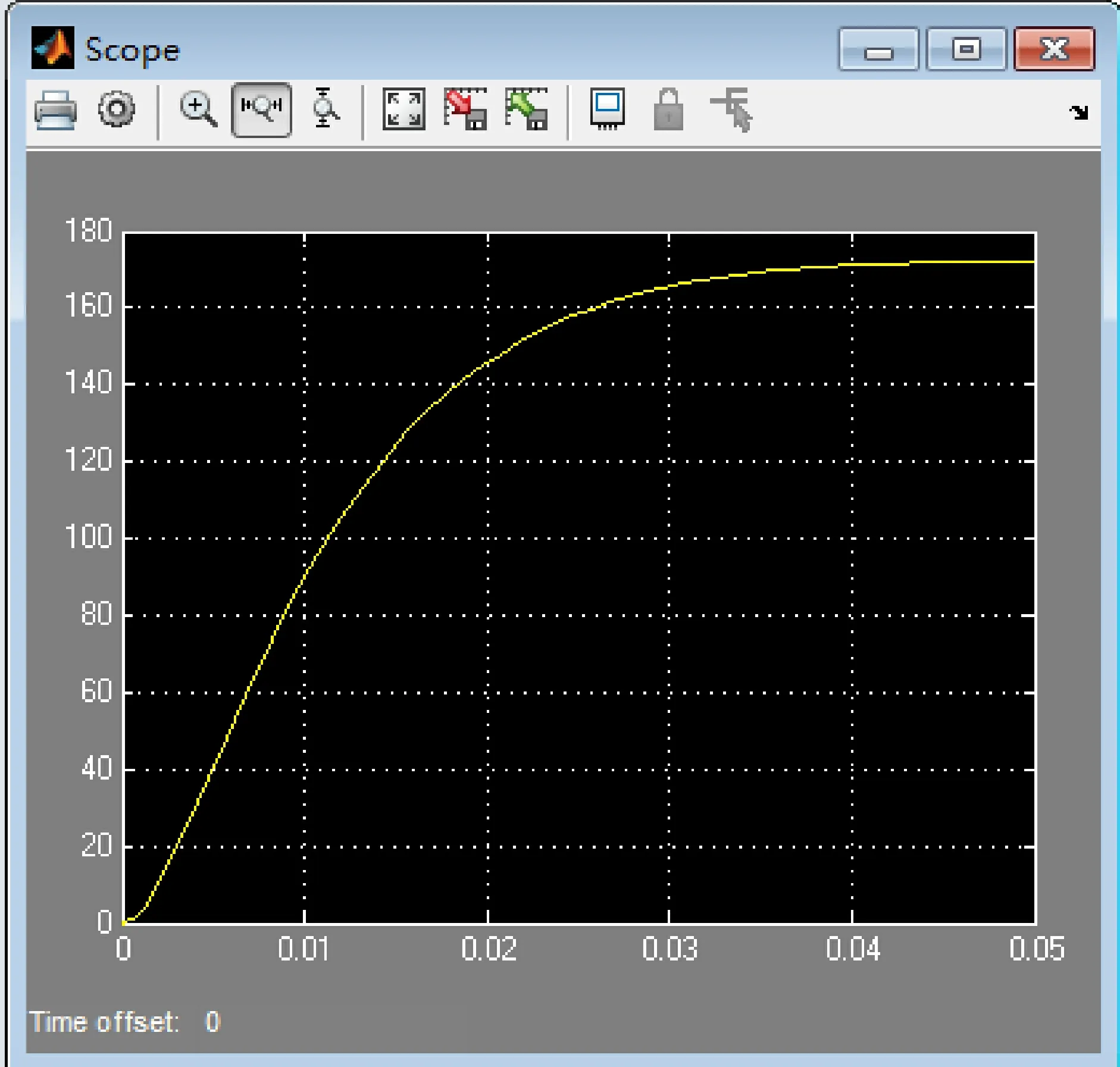
图4 当ζ=0.25时的仿真波形Fig.4 Simulation waveform with ζ=0.25
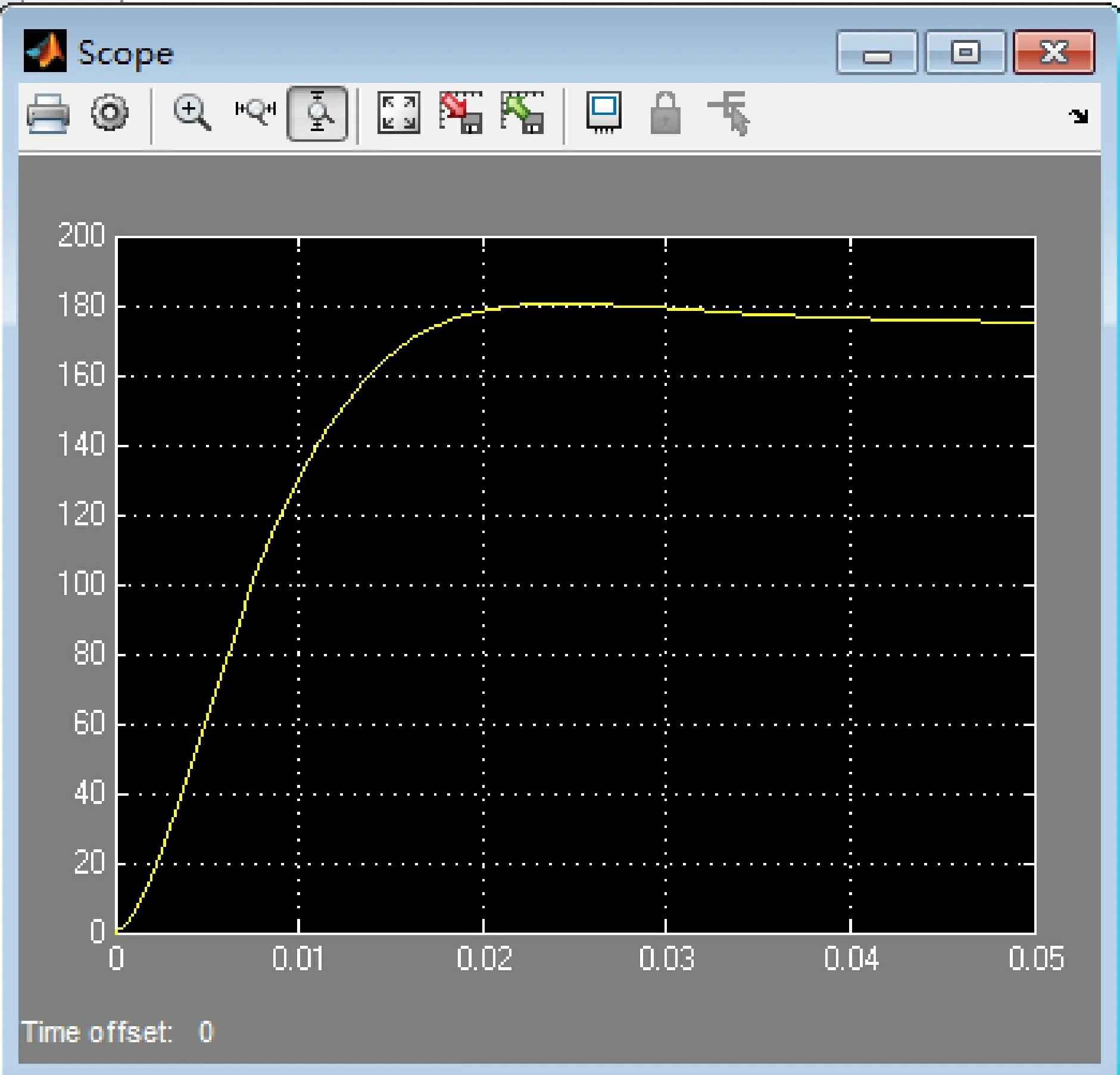
图5 当ζ=0.39时的仿真波形Fig.5 Simulation waveform with ζ=0.39
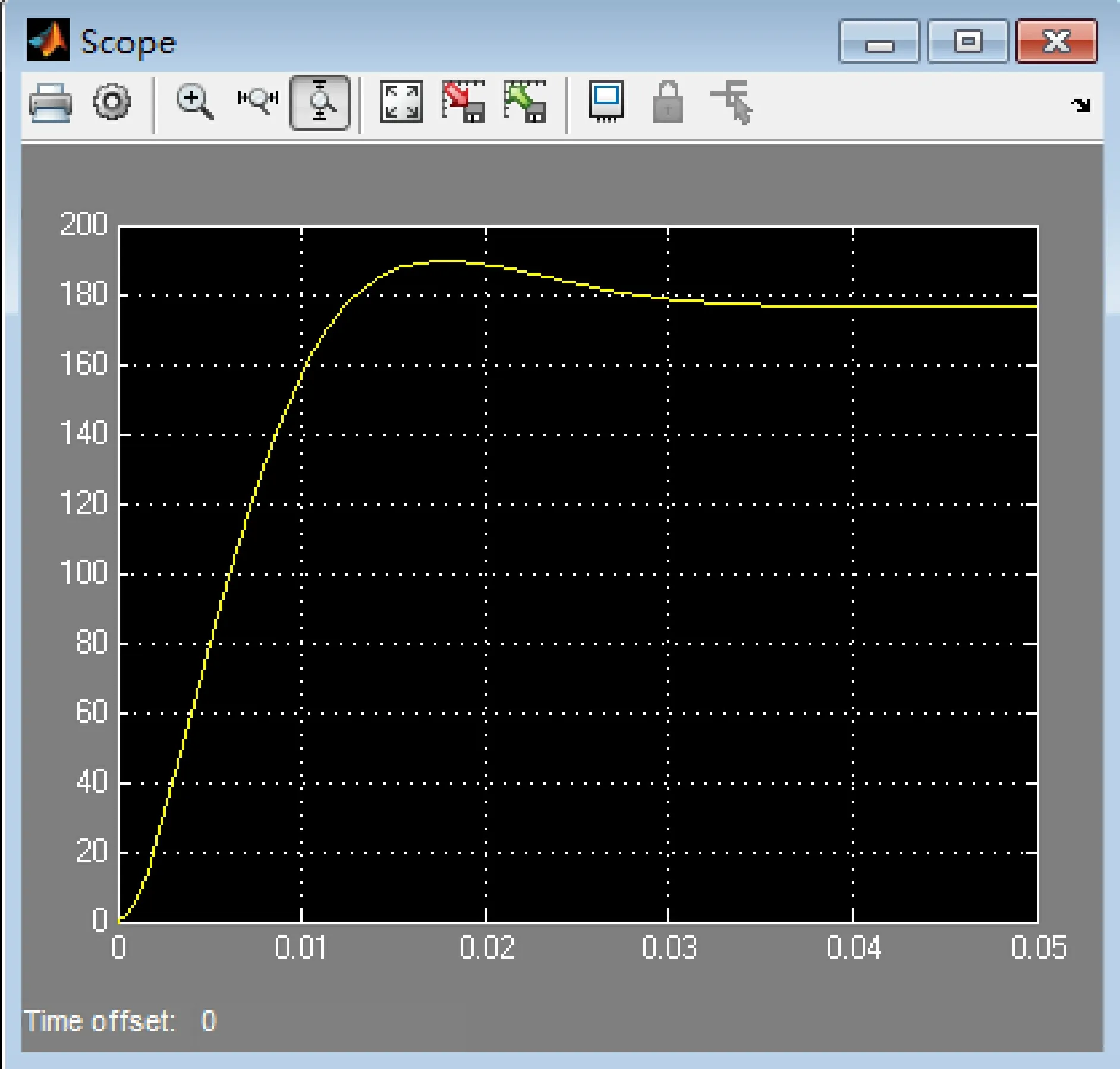
图6 当ζ=0.50时的电流仿真波形Fig.6 Simulation waveform with ζ=0.5
图8,当ζ=1.0时,超调量大,上升时间短,σ=16.3%,上升时间约为0.006 s。
结果表明: 在电流环中,ζ取值小时, 超调量小, 但同时上升时间大[7];ζ取值越大, 超调量越大, 但是上升时间减小[8]。 根据上述波形结合设计的双闭环系统, 取ζ=0.50时, 性能也较优良。
3基于Simulink的双闭环直流调速系统仿真
综上可知,当ζ=0.50时电流环的性能最优,因此在建模中不再变动电流环的参数。
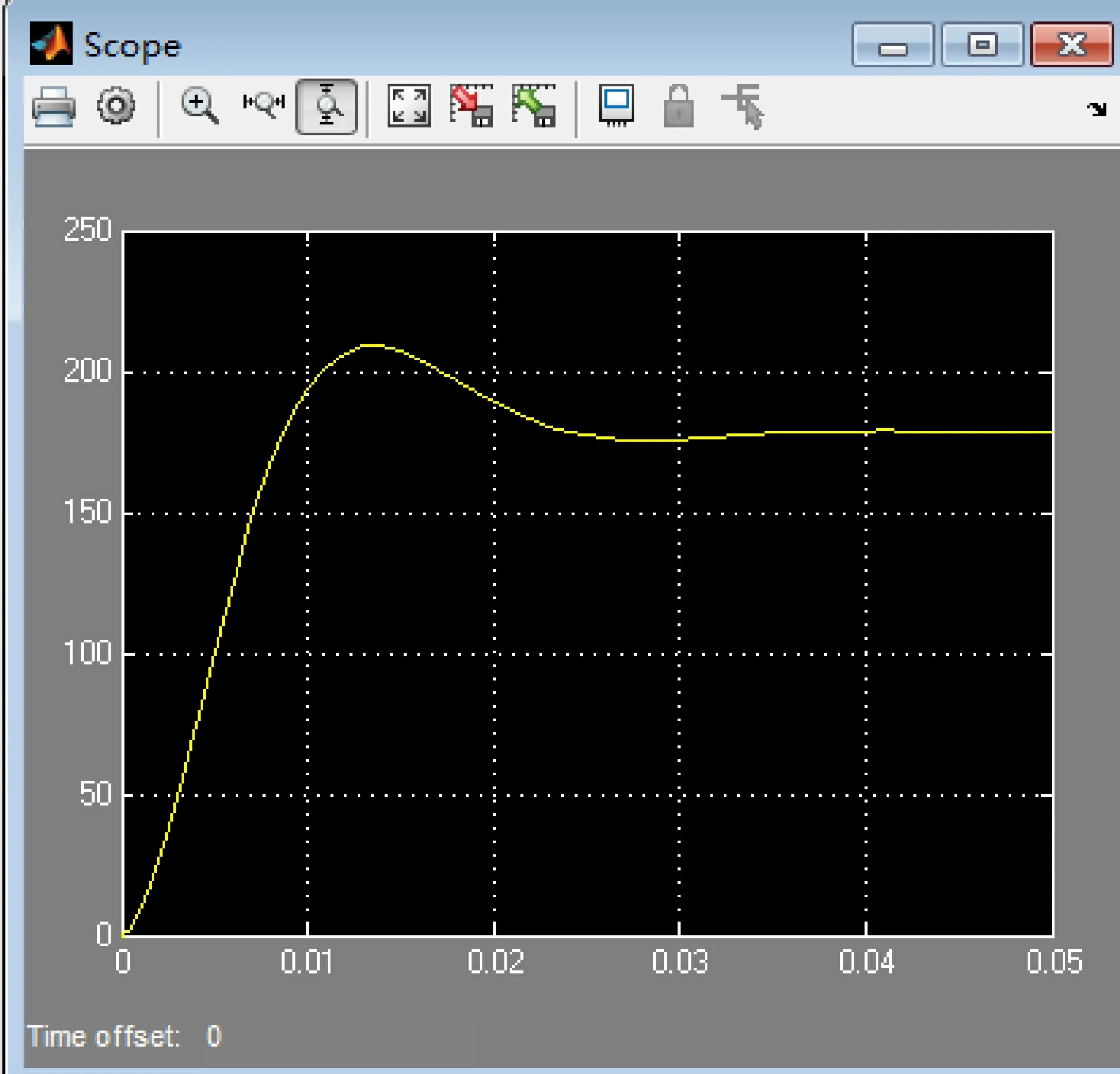
图7 当ζ=0.69时电流的仿真波形Fig.7 Simulation waveform with ζ=0.69

图8 当ζ=1.0时电流的仿真波形Fig.8 Simulation waveform with ζ=1.0
3.1系统在空载运行时的仿真分析
给定电压设为10 V,让系统空载运行,得到仿真波形图(图9)。其中横坐标表示时间(s),纵坐标表示转速(r/min)。
可知,当系统给定电压10 V,经历1 s,系统达到稳态,转速稳定在1 000 r/min,与选用的电机参数完全相符[9]。更改给定电压,观察波形的变化。转速超调量小于10%,符合设计要求。当电压为5和3 V时的仿真波形见图10和图11。
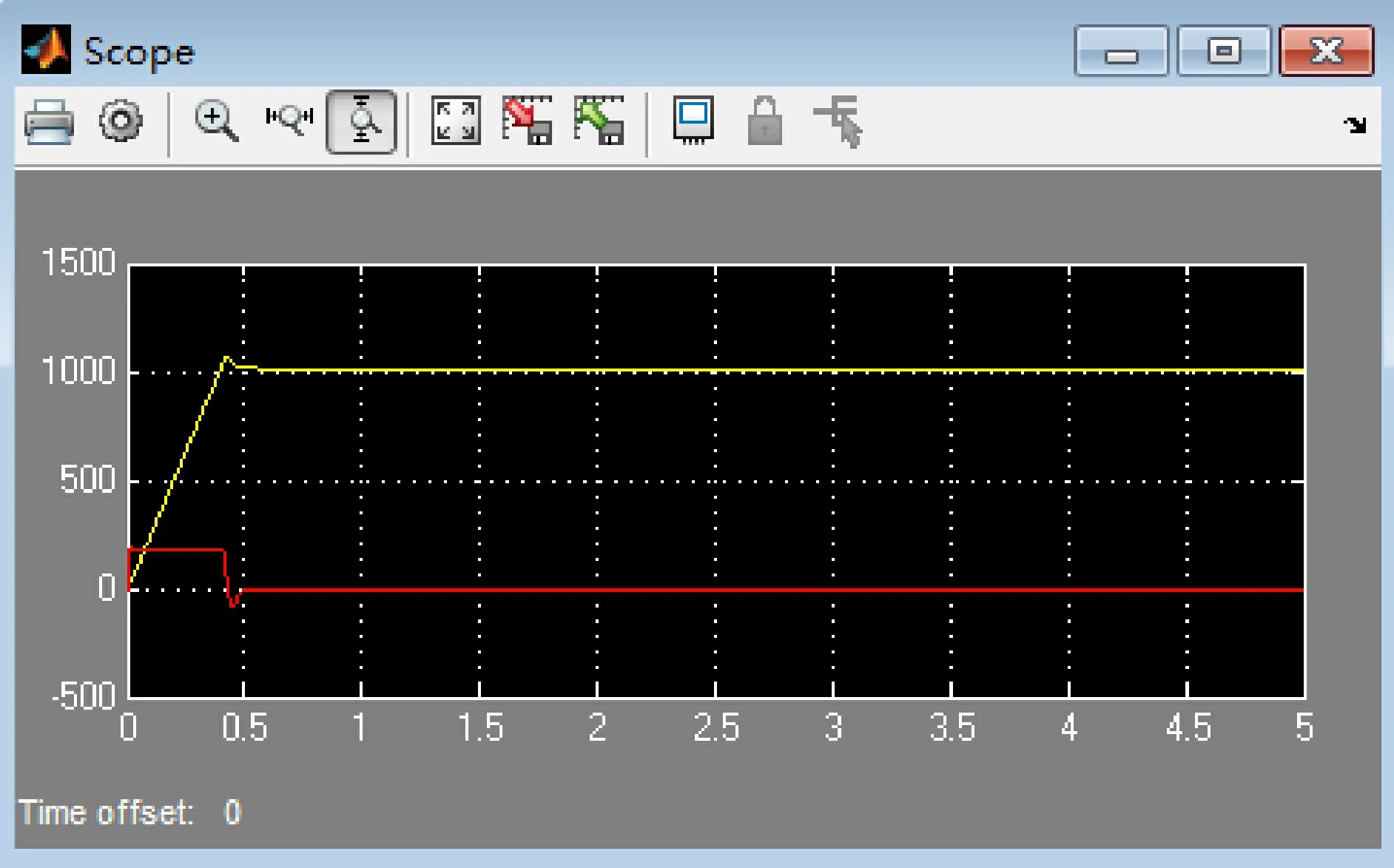
图9 当给定电压为10 V时的仿真波形Fig.9 Simulation waveform with 10 V
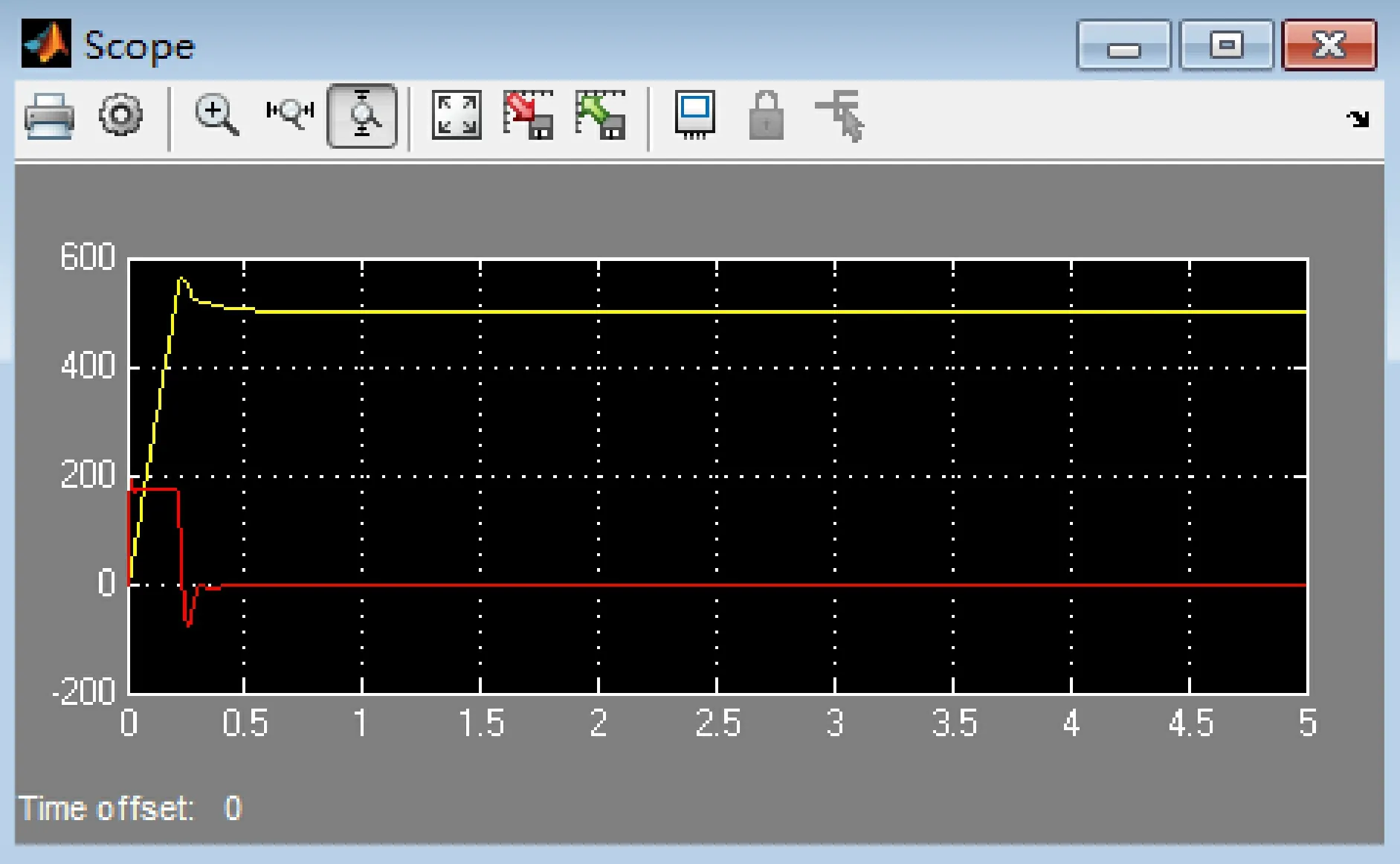
图10 当给定5 V时的仿真波形Fig.10 Simulation waveform with 5 V
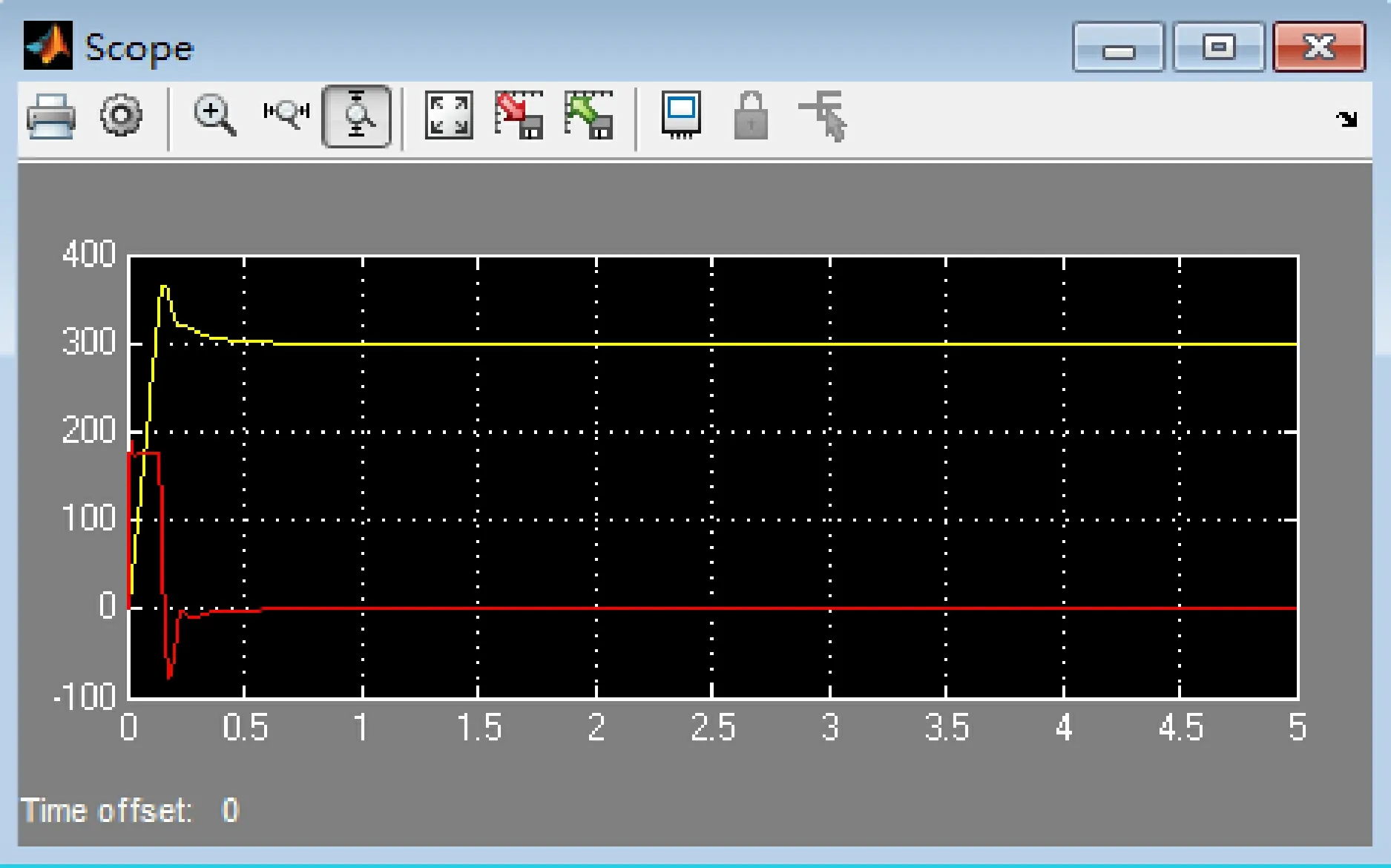
图11 当给定为3 V时的仿真波形Fig.11 Simulation waveform with 3 V
可知,转速、电流双闭环直流调速系统的电机转速会根据给定电压而稳定地变化:给定电压越小,稳定转速越小[10]。当给定为10 V时,电机按照额定转速运行[11]。
3.2系统在额定负载运行时的仿真分析
施加给系统一个负载, 使得系统工作电流等于额定电流,即120 A,观察仿真结果。
观察图12可知,当系统在额定负载情况下运行,虽然上升时间较长,但是最后依然会达到额定转速1 000 r/min。
3.3系统抗扰性能测试
系统在给定电压为10 V,在3 s时突加负载电流,添加额定负载,观察仿真波形。
在3 s时,突加给定120 A的负载电流,从图13可知,双闭环直流调速系统具有良好的抗扰性能。系统转速虽在3 s突加负载时有较小的波动,但是很快又恢复了稳定额定转速1 000 r/min。符合设计的转速无静差要求。
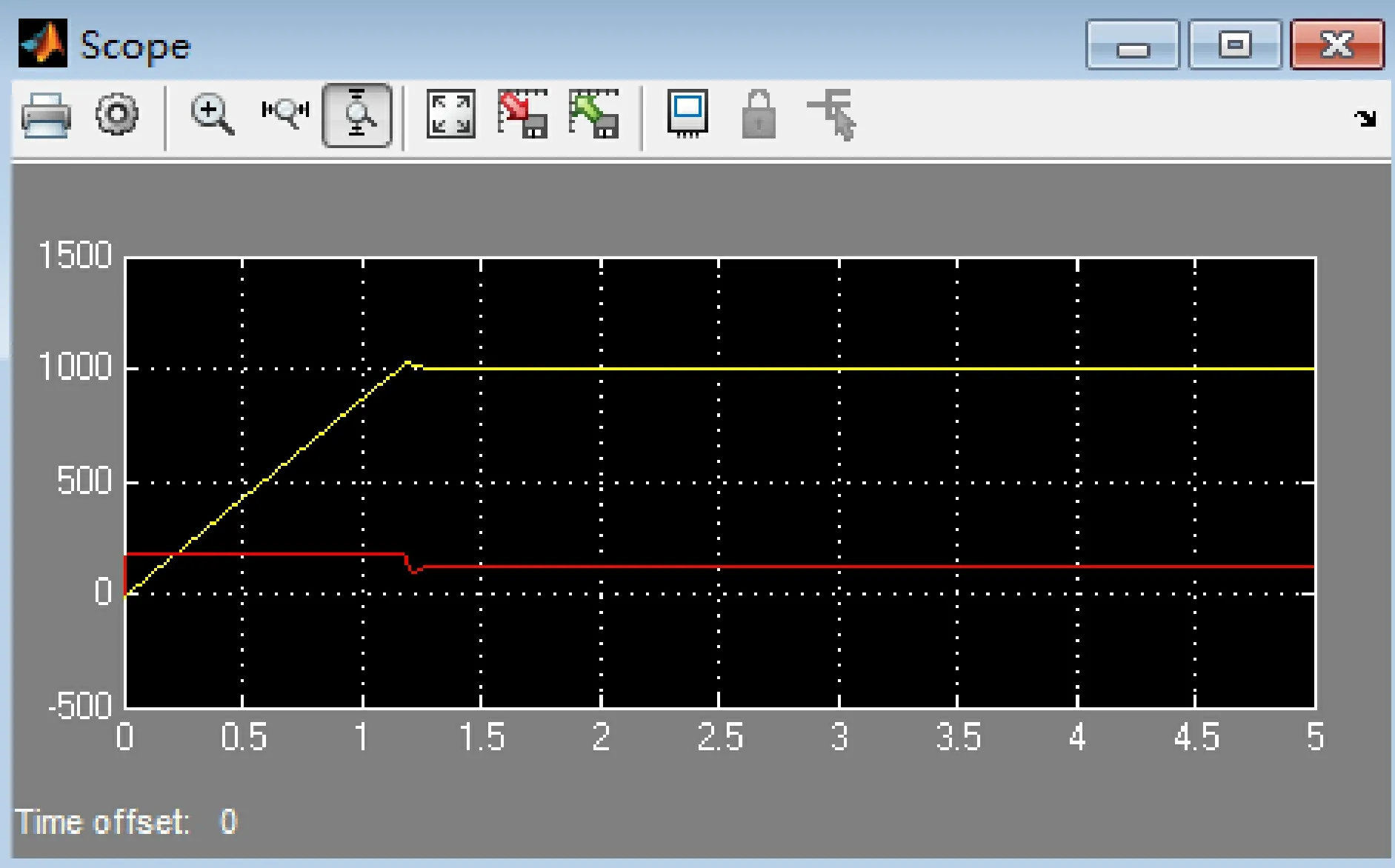
图12 额定负载运行时的仿真波形Fig.12 Rated load simulation waveform at runtime
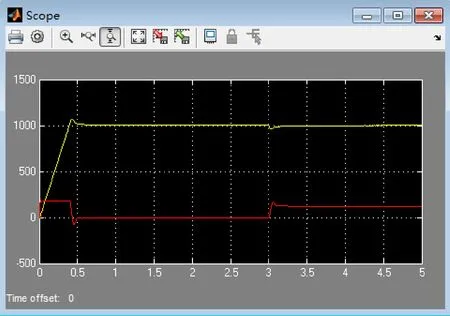
图13 在3 s时突加额定负载Fig.13 Added rated load at 3 s
4结论
以直流调速系统各环节的传递函数为基础,通过MATLAB的Simulink对系统进行建模仿真。对系统进行分析可知:阻尼系数越大,超调量越大,上升时间越短,当阻尼系数为0.50时,电流环性能达到最优。在电流环性能最优时:空载运行条件下,系统稳定转速随给定电压变小而变小;额定负载条件下,通过较长上升时间,达到额定转速。抗扰性检验表明,该系统抗扰性较强。通过仿真研究,进一步证实了双闭环调速系统的实用性和先进性,尤其是在分析和设计调速系统时,具有一定的帮助,有利于提高调速系统的性能指标,对于该系统在冶金、地质等领域的推广使用有一定的参考价值。
参考文献:
[1]廖京盛.基于TMS320LF2407的直流调速系统设计与实现[D]. 广州:华南理工大学, 2005.
[2]朱祥. 基于PLC大功率直流调速系统研究与设计[D]. 大连:大连海事大学,2013.
[3]樊娜. 潜器直流永磁电机推进系统的自适应控制[D]. 哈尔滨:哈尔滨工程大学,2005.
[4]郑光, 王迤冉. 双闭环直流调速系统优化及仿真研究[J].计算机仿真,2013,30(7): 321-325.
[5] 祁汭晗. 直流 V-M 双环不可逆调速系统调节器的设计[J]. 电气自动化, 2012, 34(5): 1-3.
[6]熊小娟,韩亚荣,邱鑫. 永磁同步电机伺服系统电流环设计及性能分析[J]. 科技传播,2010(9): 62-63.
[7]冯克强. 双闭环调速系统简介[J]. 科技资讯,2012(10): 131.
[8] 孔翠香, 廖萍. 参数选择对模糊控制器动态性能的影响[J]. 井冈山大学学报: 自然科学版, 2012, 33(2): 63-67.
[9] 闫肃, 谌海云, 杜振华, 等. 基于 PLC 的直流电机转速控制系统设计[J]. 自动化与仪器仪表, 2013 (6): 63-65.
[10] 何炜. 双闭环直流调速系统仿真研究[J]. 内蒙古石油化工, 2013, 39(4): 25-27.
[11] 刘春艳, 闻玉凤. 基于 MATLAB/Simulink 双闭环直流调速系统的仿真研究[J]. 山西大同大学学报: 自然科学版, 2014, 30(3): 26-29.
文章编号:1674-9057(2016)02-0378-05
doi:10.3969/j.issn.1674-9057.2016.02.032
收稿日期:2015-02-23
基金项目:广西自然科学基金项目(2015GXNSFAA139272)
作者简介:刘胜前(1984—),男,硕士,助教,自动化专业,117980887@qq.com。
中图分类号:TP273
文献标志码:A
Modeling and simulation of double closed loop DC speed control system based on MATLAB
LIU Sheng-qian, ZHANG Lie-ping,SUN Xuan,ZHONG Zhi-xian
(Collage of Mechanical and Control Engineering,Guilin University of Technology, Guilin 541004,China)
Abstract:Combined with the rotate speed and current double closed-loop DC speed regulating system, the system structure and the circuit composition process the modeling and simulation, using the simulation software Simulink of double closed-loop DC speed regulating system current loop. The results show that the greater the damping coefficient, the larger the overshoot amount and the shorter the rise time.When the damping coefficient is 0.5, the current loop performance is best.In the optimal performance of current loop and at no-load running conditions, the system steady speed changes smaller over a given smaller voltage.At the rated loading conditions, through a long rise time, the system will be at the rated speed. Disturbance rejection test shows that the system has a stronger resistance to interference.
Key words:negative feedback; double closed loop; DC speed control system; Simulink
引文格式:刘胜前,张烈平,孙旋,等.基于MATLAB的双闭环直流调速系统建模与仿真[J].桂林理工大学学报,2016,36(2):378-382.