一种旋转机械弯曲转轴平衡配重补偿方法
2016-08-04吴玉华
路 鹏, 吴玉华
(新疆电力科学研究院,乌鲁木齐 830011)
一种旋转机械弯曲转轴平衡配重补偿方法
路鹏, 吴玉华
(新疆电力科学研究院,乌鲁木齐830011)
提出一种旋转机械弯曲转轴的平衡配重补偿方法,从所测转轴弯曲分布曲线中计算得到补偿转轴弯曲影响的配重量,从而降低旋转机械振动。根据转轴弯曲变形的特点,认为轴段截面上弯曲值与角度之间的关系以及弯曲沿轴向的分布可以分别用三角函数和多项式来拟合。为了考虑弯曲截面位置对振动的影响,依据力和力矩平衡方法,把不同轴段上的力分解到两个端面上,在两个端面上保留反对称分量力并将对称分量力修正后移到转轴中部。结合某台135 MW汽轮机高压转子弯轴实例进行了分析。
旋转机械;振动;平衡;弯曲转子
在动静部件摩擦、热变形、中心孔进油、上下缸温差、非对称截面温差等因素作用下,旋转机械的转轴会因圆周截面上的非均匀温度分布和温差而产生热变形。热变形较小时,连续盘车一段时间后,转轴会逐步伸直。一旦热变形量超出转轴所能承受的屈服极限,转轴就会形成永久弯曲。转轴弯曲后,会象偏心轮一样,产生很大的不平衡激励力,导致大幅振动和噪音,进而对机器的安全运行和寿命产生很大危害。对于旋转机械而言,转轴弯曲是一类具有破坏性的故障,人们高度关注转轴弯曲故障的治理技术[1-2]。
当转轴弯曲量较大时,需要采用电加热等方法对弯曲转子进行直轴,所需时间较长,工作量较大,而且电热直轴还具有一定的风险。当转轴弯曲量不是很大时,为了避免直轴的风险和代价,人们通常不采用直轴的方法,而是通过在转轴弯曲高点对面配重的方法来补偿转轴弯曲变形的影响。实践证明,当转轴弯曲变形量较小时,这种方法所取得的减振效果还是很好的,在工程上一直得到广泛应用[3-7]。
本文针对弯曲转子平衡补偿方法存在的问题进行了分析,提出了一种基于双三角函数的平衡配重补偿方法,结合某台135 MW汽轮发电机组弯曲转子平衡实例进行了研究。
本方法能从实测转轴弯曲分布曲线中计算得到补偿弯曲转轴对振动的影响所需的配重量,降低旋转机械振动,适用于旋转机械因各类事故导致转轴弯曲后的故障治理。
1弯曲转子配重补偿方法分析
目前弯曲转子平衡配重补偿方法主要有三角形面积重心方法和矢量合成法等。
1.1三角形面积重心方法
将转子弯曲分布曲线近似看作为三角形,转子两端视为三角形的两个端点,将最大弯曲点视为三角形的第三个端点,由此计算出三角形的重心和面积,将面积乘以转轴均布质量得到配重量,在重心所在截面弯曲高点的对面施加该配重量。
该法比较简单,计算方便。但该法将弯曲分布曲线简化为斜线,与实际弯曲形状相差较大。该法主要适用于均布质量轴。当转轴结构比较复杂时,例如,轴段非均布质量轴、轴段截面直径差异较大以及轴段存在附加质量时,该法误差较大。
1.2矢量合成法
根据转轴形状,选择突变截面和叶轮截面等处,将其划分为若干轴段。计算出轴段质量,测出(或插值求出)每一轴段的弯曲量,求出轴段质量和弯曲量的乘积。将该乘积和其所在圆周角度合起来看做为该截面弯曲力矢量。将该轴段不同角度处的弯曲力矢量按矢量和相加,得到该轴段弯曲力矢量和。将所有轴段弯曲力矢量和相加,得到转轴总的弯曲力矢量,在总的弯曲力矢量的对面施加相应的补偿配重。
该法考虑了轴段直径非均匀以及附加质量等因素的影响,但该法将不同截面处弯曲力所起的作用等效看待,直接求其总和,没有考虑弯曲力所在截面位置对振动的影响。该法将某一截面不同圆周角度处的弯曲力按矢量和相加,求出该截面弯曲力矢量和,以此作为该截面的弯曲力。实际上,某一截面上转轴弯曲量及其所在的角度是恒定的,不应该用矢量相加的方法求得。
2基于函数逼近的平衡配重补偿方法
2.1函数逼近思想的提出
2.1.1转轴弯曲沿轴向分布
转轴弯曲是由于某一截面上温度分布不均所引起的。由材料力学理论可知,截面温度不均将在转子截面上产生弯矩Mx,My:
Mx=∫Aγ0·E·T·ydA
My=∫Aγ0·E·T·xdA
(1)
式中:γ0为线膨胀系数,E为弹性模量,T为温度分布。
以图1所示的简支梁为例,外界弯矩mc作用下转轴弯曲变形y为:

(2)
式中:I为截面惯矩,E为弹性模量,T为温度分布。由此可见,某一截面温度不均所引起的弯曲变形沿轴向分布可以用一个多项式来表示。由线性理论可知,多截面温度分布不均所引起的弯曲变形可以由单截面线性叠加而成,因此也可以用多项式来逼近。

图1 弯矩作用下的简支梁弯曲变形模型Fig.1 The model is the bending of simply supported beam under the action of moment
将测量所得轴弯曲变形沿轴向分布用多项式来逼近,不仅可以准确找到转轴上最大弯曲截面和弯曲量,而且可以用较少的测点来获得较高的测量精度,降低测量误差;
2.1.2转轴弯曲沿圆周方向分布
以图2为例分析。设转轴弯曲量为δ,圆周角度为θ,则y方向上位移为y=δsinθ,不同角度处的弯曲变形沿圆周方向上的分布满足三角函数关系。因此,可以将测量所得某一轴段弯曲变形沿圆周方向上的分布用三角函数来拟合,不仅可以准确找到截面上最大弯曲量及其所处圆周角度,而且可以用较少的测点数来获得较高的测量精度,减少测量误差。

图2 简支梁弯曲沿圆周方向分布模型Fig.2 The model for beam bending along the circumference
2.2不同截面弯曲量的等效
不同截面处的弯曲变形对振动的影响不同,不能简单地计算其总和。本方法提出利用力和力矩平衡原理,将不同截面上弯曲力矢量向转子首尾两个端面等效,求得两个端面上的合力矢量。将两个端面上的合力矢量分解为对称和反对称分量。在两个端面上保留反对称分量,将对称分量考虑两端平面与待加重平面之间灵敏度差异后移植到转轴中部。
2.3具体实现方法
本方法的具体实现步骤如下:
(1) 沿着转子轴向,选择若干截面Pi,i=1,2,…,m布置千分表。记截面到转轴首部的距离为li,i=1,2,…,m。在圆周方向上,选择若干角度φj,j=1,2,…,n,并作好标记。该角度一般是等间隔选择,n取为偶数。
(2) 低速盘动转轴,测量不同截面、不同角度处千分表读数,记为Aij,i=1,2,…,m,j=1,2,…,n;
(3) 计算不同截面、不同角度处的转轴弯曲值Bij
(3)
式中:下标k的选择方式如下:
(4)
(4) 选择某一截面i,将截面弯曲量Bij与圆周角度φj之间的关系用三角函数拟合
Bij=Ci1cos(Ci2+φj)
(5)
式中:Ci1,Ci2为待求系数,可以借助数值分析理论中的非线性函数最小二乘拟合等方法求得。
截面i处的实际弯曲量Di和角度Ei
Di=Ci,1
Ei=2π-Ci,2
(6)
选择不同截面,重复上述步骤,可以得到所有截面处的弯曲量和角度。
(5) 将不同截面处弯曲量Di与轴段位置li之间的关系用多项式函数拟合
(7)
式中:n为多项式系数,一般情况下n≤3,ai为待求系数,可以借助数值分析中的最小二乘拟合等方法求得。由上式可以求得转轴实际弯曲曲线的空间分布形状。
(6) 选择转轴截面突变处、叶轮和叶片截面处等,将转轴划分为m1个轴段,如图3所示,计算轴段质量Gk,k=1,2,…,m1
Gk=ρπRk2Δlk+weightk
(8)
式中:ρ为转轴密度,Rk,Δlk为轴段半径和轴段长度,weightk为轴段上叶轮和叶片等部件所带来的附加质量。

图3 轴段质量计算模型Fig.3 The calculation model of shaft segment mass
(7) 计算轴段k的弯曲力Hk
Hk=Gk·D(lk)
(9)
(8) 在转轴上选择首尾两个端面,记轴段k到首端和尾端的距离分别为sk,1,sk,2,利用力和力矩平衡原理将弯曲力Hk等效分解到两个端面上,如图4所示,得到Pk,1,Pk,2
(10)
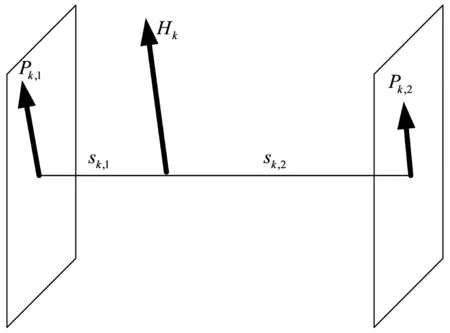
图4 某一段弯曲力向端部两个平面上的分解Fig.4 An bending force decomposed to the selected two end sections
将其它轴段上的力按同样的方法分解到两个端面上。
(9) 将等效到首端平面上的各轴段等效力合成,得到首端平面上的总力P1。将等效到尾端平面上的各轴段等效力合成,得到尾端平面上的总力P2。
(11)
(10) 将首尾两端的合成力P1,P2分解为对称分量力Pd和反对称分量力Pf,如图5所示。
(12)
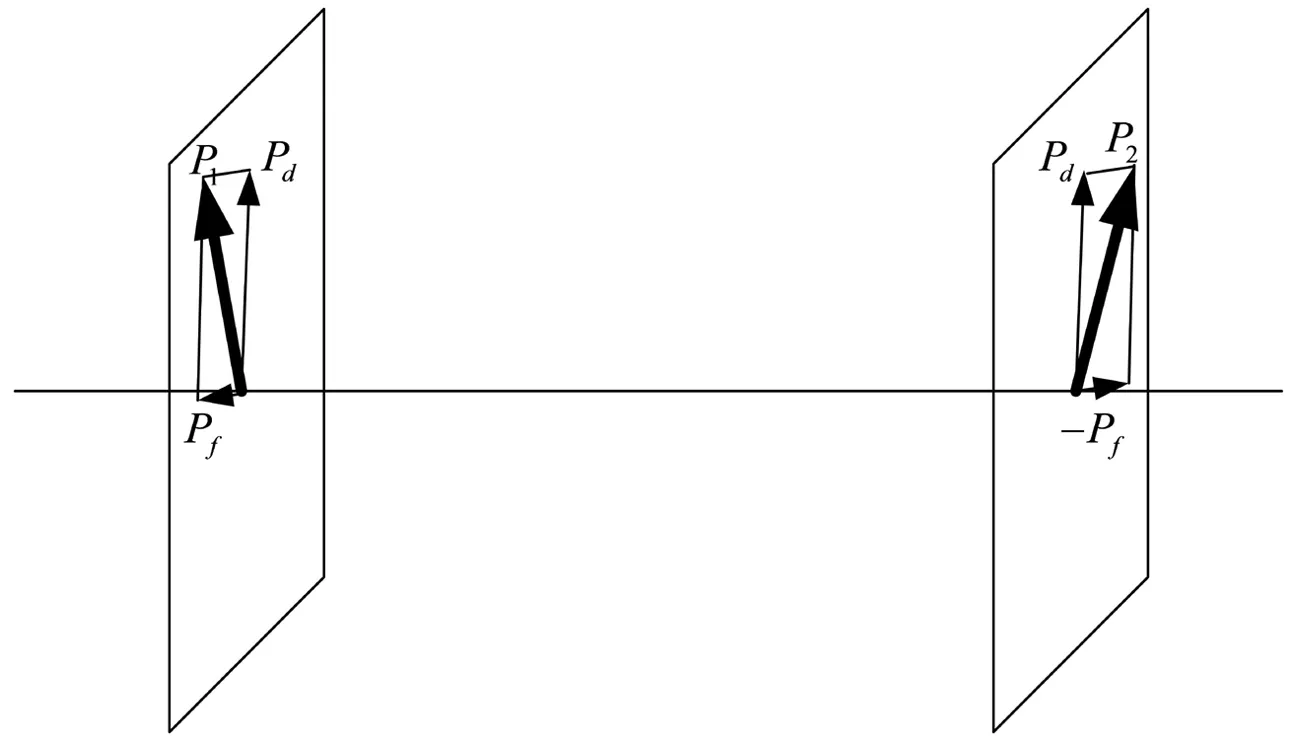
图5 两个平面上合成力的分解Fig.5 Decomposition of synthetic force on the twoselected planes
(11) 首端平面保留力Pf,尾端平面保留力-Pf,将对称分量力Pd向转轴中部移植。对称分量力移植到中部后,对振动的影响比较灵敏,移植到转轴中部后的力Q应比Pd小,如图6所示。
Q=α·Pd
(13)
式中:α为系数,一般可以取α=0.5~0.8。

图6 移植后的力Fig.6 Transplanted force
2.3补偿方法特点分析
与现有技术相比,本补偿方法的有益效果如下:
(1) 通过对圆周方向上实测弯曲值的三角函数拟合,能够比较准确地求出截面实际弯曲值和弯曲角度,减小测量误差。
(2) 通过对转轴长度方向上弯曲值的多项式函数拟合,能够比较准确地求出转子弯曲曲线在空间上的分布,减小测量误差。
(3) 通过力的等效、对称和反对称分解以及力的移植,可以考虑不同截面弯曲力对振动所起的不同作用。
3某135 MW汽轮机弯轴补偿实例
某台135 MW汽轮发电机组的高压转子出现了弯轴,决定利用机组检修机会实施平衡配重补偿方案。该转子总长7 384 mm,总重27 413 kg,如图6所示。晃度定义为转轴圆周方向上相对的两个角度处千分表读数的差值。事故前转轴各截面最大晃度0.03 mm,事故后转轴各截面最大晃度增大到0.085 mm,由此导致振动达到0.138 mm,振动处于报警状态。

图7 转子图Fig.7 The shaft diagram
检修时,沿转子轴向布置了10个测量截面,在每个截面沿圆周方向设置了8个测量角度,如图8所示。
表1给出了低速盘车状态下各截面千分表和转轴晃度测量数据。
图9给出了P5截面处的晃度量沿圆周方向分布实测图和拟合图。从图中可以看出,晃度量沿圆周方向上的分布可以用三角函数作比较准确的拟合。在圆周方向60度处弯曲量最大。

图8 转轴弯曲测点和测量角度布置Fig.8 The measuring points and measuring angle of bending distributed on the shaft
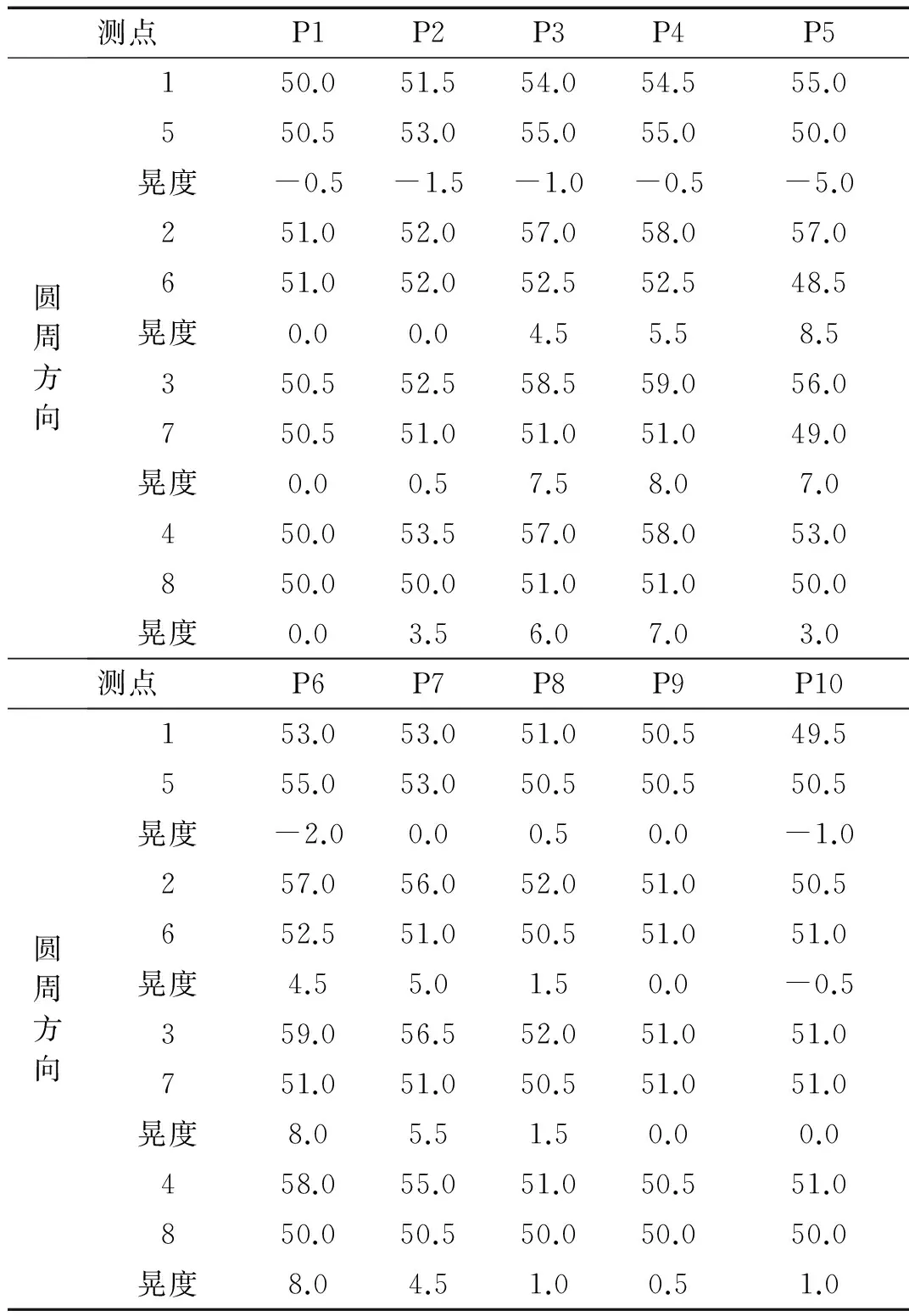
测点P1P2P3P4P5圆周方向150.051.554.054.555.0550.553.055.055.050.0晃度-0.5-1.5-1.0-0.5-5.0251.052.057.058.057.0651.052.052.552.548.5晃度0.00.04.55.58.5350.552.558.559.056.0750.551.051.051.049.0晃度0.00.57.58.07.0450.053.557.058.053.0850.050.051.051.050.0晃度0.03.56.07.03.0测点P6P7P8P9P10圆周方向153.053.051.050.549.5555.053.050.550.550.5晃度-2.00.00.50.0-1.0257.056.052.051.050.5652.551.050.551.051.0晃度4.55.01.50.0-0.5359.056.552.051.051.0751.051.050.551.051.0晃度8.05.51.50.00.0458.055.051.050.551.0850.050.550.050.050.0晃度8.04.51.00.51.0

图9 实测和拟合所得P5截面晃度沿圆周方向上的分布Fig.9 The simulation curve and measured ones of the axle’s flutter distributed along the circumference in P5 section
图10给出了各截面弯曲量沿轴向分布实测图和拟合图。从图中可以看出,弯曲量沿轴向的分布也可以用多项式函数作比较准确的拟合,实测弯曲分布有一定误差。

图10 实测和拟合所得弯曲量沿轴向长度方向分布Fig.10 The tortuosity of fitting curve and measured ones distributed in axial direction
按上述方法,以拟合后得到的圆周方向60°处数据为基准,将每一轴段的不平衡力向两端分解,合成后得到两端不平衡量分别为343.6 g和329.3 g,其中:


将对称分量向转子中部移植,取加重半径为450 mm和系数值0.7后,得到在转子中部240°方向加重523 g。因为反对称分量较小,两侧端面暂时不加这组反对称分量。
机组检修后开机,升速过程中和定速下高中压转子各点转轴振动小于0.05 mm,达到优秀水平。平衡补偿取得预期效果。
4误差分析
受加工精度等方面因素的影响,转轴截面本身存在初始跳动度,对测量结果会产生一定的影响。误差分析如下:
(1) 截面不光滑。圆周和轴线方向上的晃度分布都应该为连续函数,因此,可以通过对截面上多点晃度测量值的三角函数(连续函数)拟合来消除测量误差,如图9和图10所示;
(2) 轴截面椭圆度。轴截面存在椭圆度时,转动一周过程中,晃度变化频率为转动频率的2倍。因此,其影响可以通过对截面上多点晃度测量值的三角函数(周期取为2π)拟合来消除。
5结论
本平衡配重补偿方法充分利用了转轴弯曲后沿轴向和周向分布特征,减少了测量误差,考虑了转轴弯曲截面所在位置对振动的影响。该方法在某台135 MW汽轮机弯轴后的故障治理工作中取得了很好效果。
[1] 丘富学. 高中压合缸300 MW汽轮机弯曲转子动平衡[J].河南电力,2001,13(1):6-7.
QIU Fu-xue. Dynamic balancing for bow rotor on 300 MW HP IP combined turbine units[J].Henan Electric Power,2001,13(1):6-7.
[2] 肖高绘,葛庆,蒋浦宁,等. 600 MW超临界机组高中压转子弯曲的动平衡修复[J].热力透平,2009,38(4): 259-262.
XIAO Gao-hui, GE Qing, JIANG Pu-ning,et al.Solving deflection of HP-IP rotor for a 600 MW supercritical unit by dynamic balance test[J]. Thermal Turbine, 2009,38(4): 259-262.
[3] 安胜利,杨黎明. 转子现场动平衡技术[M].北京:国防工业出版社, 2007.
[4] Deepthikumar M B, Sekhar A S,Srikanthan M R. Modal balancing of flexible rotors with bow and distributed unbalance[J]. Journal of Sound and Vibration, 2013,332:6216-6233.
[5] Nicholas J C,Gunter E J,Allaire P E, Effect of residual shaft bow on unbalance response and balancing of single mass flexible rotor. PartI—unbalance response[J]. Journal of Engineering for Power ASME,1976,171-181.
[6] Nicholas J C, Gunter E J, Allaire P E, Effect of residual shaft bow on unbalance response and balancing of single mass flexible rotor. PartII-balancing[J].Journal of Engineering for Power ASME,1976:182-189.
[7] Parkinson A G, Darlow M S, Smalley A J. Balancing of flexible rotating shafts with an initial bend[J]. AIAA Journal,1984,22(5):683-689.
A compensation weight calculation method for bending shaft balance of a rotating machinery
LU Peng, WU Yu-hua
(Xinjiang Institute of Electrical Science, Urumqi 830011, China)
Here, a compensation weight calculation method for bending shaft balance of a rotating machinery was presented. The compensated weight was calculated from a measured rotor bending curve to reduce to rotating machinery’s vibration. The deflection of rotor’s cross section versus angle and its distribution. along shaft axis were fitted using triangular functions and polynomial functions, respectively. Unbalance forces in each shaft section were divided into its two ends’ cross sections using force and moment equilibrium method considering the influence of cross section’s location on the vibration of the rotating machinery. The symmetric force components were moved to the shaft center while the a symmetric force components were kept in the two end’s cross sections. The method was used to calculate the compensation weight for a 135 MW turbine’s high pressure rotor successfully.
rotating machinery; vibration; balance; bending shaft
10.13465/j.cnki.jvs.2016.11.033
2015-02-11修改稿收到日期:2015-07-08
路鹏 男,高级工程师,1975年4月生
TH113.1
A
