基于无人机技术的水质监测采样装置
2016-07-29刘国洋魏茂源
刘国洋,王 宇,魏茂源,李 楠
(山东科技大学,266510)
基于无人机技术的水质监测采样装置
刘国洋,王 宇,魏茂源,李 楠
(山东科技大学,266510)
摘要:为提高水质监测的效率、减少人力劳动和能源的浪费,提出了基于无人机技术的水样采集、水质监测装置,将现场通过水泵采样的数据通过无人机上搭载的STM32微处理器进行处理后用GPRS网络发送至服务器端,地面控制端通过PC机上的上位机进行数据的接收和无人机的控制。实验表明,该装置可高效地进行实时水质监测。
关键词:无人机;水质监测;STM32F103;GPRS
0 引言
近年来,受人类活动的影响,水资源污染越来越严重,近半数水资源收到严重污染。目前我国水质监测主要依靠人工监测和无人船监测,人工监测需要实地采样,周期很长且需要消耗大量人力物力;目前最新出现的水质监测船也有一定缺陷,如在水面收到严重污染或有大量漂浮物是无人船会受到阻碍和污染。本文设计了基于无人机技术的水质监测采样装置,较好的弥补了上述缺陷,且有助于水质监理的高效化和精确化,提高了水质监测的信息化水平,并最终达到水质监理监测自动化、信息化和现代化的目的。
1 拟解决的关键问题
本基于无人机技术的水质监测采样装置拟解决的关键问题有:
(1)地形复杂、险要、地处偏僻的水样采集点代替传统索道采集方式,提高采集效率与人员操作危险性;(2)开拓包含有害、有毒、放射性污染物的水域与地域人员无法涉足的采样空白领域,增强突发事件处置时效性;(3)需要频繁采样的水域,或在水域中央采样的水域,降低单次采样成本,减少人员、车辆与船舶的经济开支。
2 总体设计方案
2.1无人机主体设计
本无人机主要采用市面上常见的四、六旋翼无人机,利用多旋翼无人机飞行稳定,易于操作,动作灵活等优势。无人机采用11.2V、3300mAh锂电池作为系统的能源,因飞行环境与水样容积不同,飞行时间在25~40min之间。本设计无人机采用自组装四旋翼无人机,采用NAZA LITE飞控,2212电机,30A电调,GPS模块,1045和8045浆各两片,可以实现飞行时负载1kg的重物。
2.2水样采集装置设计
水样采集部分主要包含有上盖板、下盖板、连杆、支柱、法兰盘、万向节、橡胶卡、舵机、水泵、导管、浮漂与滤网组成。法兰盘安装在无人机底部,其作用是将连杆与万向节连接,万向节的作用为避免水样瓶采样的先后顺序导致水样采集部分侧翻,并将不平衡的扭矩传递到无人机上通过飞控的感应控制螺旋桨维持平衡。万向节下端连接有连杆,连杆与上盖板刚性连接,上下盖板通过支柱刚性连接,下盖板中心有圆孔方便导管下放。下盖板平均分布有四个橡胶卡,用于固定采样瓶,其优点是能够快速更换采样瓶,且能够兼容多口径、多容量的采样瓶。上盖板安装有一舵机,电机外壳刚性连接在上盖板上,其输出轴安装有小面积圆盘,圆盘上方固定有一水泵,水泵的出水口安装有折弯的导管,将水样输送至采样瓶中,其进水口连接有柔性软导管,延伸至无人机悬停水域水面以下,柔性导管末端安装有滤网,滤网上方安装有可调节的浮漂,用于限定采集水样的深度。
2.3控制及数据传输系统设计
(1)通过富斯i6控制器来发送信号来控制无人机的飞行,采用射频发送,能控制6个通道,距离超远,可达1000米,飞控中包含的GPS模块主要实现无人机的悬停,定高等操作;
(2)基于STM32微处理器,通过识别遥控器接收器未使用的第五或第六通道发出的PWM波来代替开关量。当识别出PWM波占空比大于一定百分比时便触发采集水样的操作。单片机引脚发送信号给三极管经过电流放大后接在继电器上以控制水泵的开关。
(3)通过控制STM32发出的PWM占空比来调节舵机的角度,实现了每触发一次开关量便在接下来的十秒内分别执行两次顺时针旋转45度的指令。
(4)传感器对已采样的水样进行检测,本例中仅对水样温度进行了检测,后续可加入更多传感器。此功能用到的模块有SIM900A模块,STM32F103,DS1820温度传感器。硬件框图如图1
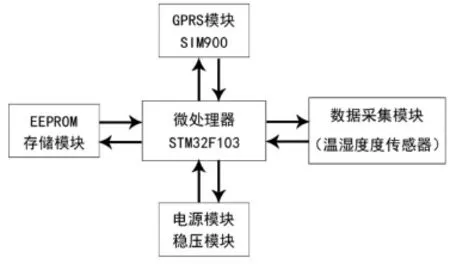
图1
当装置开始工作时,DS18B20将原始数据通过串行口发送至STM32进行处理,每次测量的时间和温度数据会存至外部EEPROM以免丢失。SIM900的GPRS模块与STM32之间的通信通过串行口发送AT指令完成,通过AT指令对SIM900进行初始化,配置参数,继而通过AT指令控制GPRSModem与服务器进行连接,实现透明传输,将数据传送至服务器。
3 作业流程
具体作业过程如下:
(1)规划作业路径
可以根据视频传输的图像加之肉眼视觉作为参考依据飞行,或者采用卫星定位进行直达定点飞行,亦可在固定取水电点安置信标,方便无人机进行航行至水体上方后进行悬停。
(2)采集第一次水样
悬停后舵机工作将出水口对准采样瓶口,水泵开始工作,一段时间后停止。此时瓶中传感器对水样进行检测并通过STM32处理器进行分析,将原始数据通过GPRS传输至地面控制端。无人机航行至下一采样地点并悬停在水域上方。
(3)采集非首次水样
采集非首次水样时,为保证水样品质均要对管路用待采样水体稀释清洗,两舵机协调旋转出水口至两个采样瓶之间,启动水泵,稀释清洗完成后关闭水泵,步进电机转动使得出水口对准采样瓶,后再次循环步骤2中的过程。
(4)返航
按照要求完成所有采样瓶的采样工作后,无人机返航。
(5)二次出发
快速更换洁净的采样瓶与电池后无人机将再次出发,循环上述的过程。
4 控制端软件设计
地面控制端上位机用可视化强,代码较为简单的VB设计,上位机的功能主要是从指定服务器获取数据并处理显示。在测试中,无人机获取的数据被传送到指定服务器,由服务器分析后存储在一个指定文档中,地面控制端的上位机只需定时读取和修改这个文档中的信息即可实现数据的接收和对无人机的控制。软件界面如图2
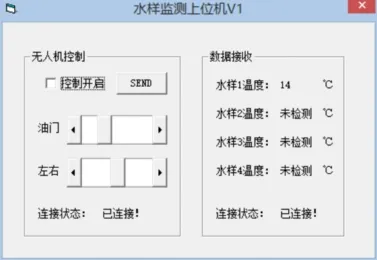
图2
5 结语
本文设计了一款基于无人机技术的水质监测采样装置,通过STM32F103与SIM900A的GPRS模块分析和传输数据,将带有水泵的小型化的采样和分析处理装置与目前极具发展前途的无人机相结合,具有采样便捷、实时监测、无线控制、多点采样等特点。实现了在恶劣环境下的水质采样,实时分析监测数据的功能。极大的降低了水质监测的成本,为水质监测的发展开辟出一条新的道路。
参考文献
[1]刘亮,王击,杨泽.基于ARM Cortex-M3和Internet的实时数据采集系统设计[J].2011(11).
[2] 周启星.环境基准研究与环境标准制定进展及展望 [J]. 生态与农村环境学 报, 2010, 26(1):1~8.
[3]杨明智,王敏.四旋翼卫星飞行器控制系统设计[J].计算机测量与控制.2008(16).485-490
[4]单海燕.四旋翼无人直升机飞行控制技术研究[D].南京航空航天大学.2008
作者简介
刘国洋(1995.04- ),男,山东省青岛人,汉族,本科,研究方向:测控技术与仪器
王宇(1993.10- ),男,山东省潍坊人,汉族,本科,研究方向:机械设计制造及其自动化
魏茂源(1995.01- ),男,山东省东营人,汉族,本科,研究方向:材料成型及控制工程
李楠(1996.01- ),女,山西省临汾人,汉族,本科,研究方向:测控技术与仪器
Water sampling and quality monitoring device based on UAV technology
Liu Guoyang,Wang Yu,Wei Maoyuan,Li Nan
(Shandong University of Science and Technology,266510)
Abstract:In order to improve water quality monitoring efficiency and avoid wasting labor and energy resources,a water sampling and quality monitoring device is designed on basis of UAV technology. Statistics collected from the water-pump will be processed by the STM32 microprocessor in the UAV and then the results will be sent to the service terminal through GPRS network. The upper computer of the control terminal on the ground will receive the processed results and control the UAV in the meanwhile. Through experiments, it can be proved that the device can efficiently perform real-time water quality monitoring.
Keywords:UAV;water quality monitoring;STM32F103;GPRS
