无人机自主控制应用需求及研究发展分析
2016-07-12贺若飞李大健刘宏娟刘慧霞
贺若飞,李大健,刘宏娟,刘慧霞
(1.西北工业大学第365研究所,西安 710038;2.西安爱生技术集团公司,西安 710038)
无人机自主控制应用需求及研究发展分析
贺若飞1,李大健1,刘宏娟2,刘慧霞1
(1.西北工业大学第365研究所,西安710038;2.西安爱生技术集团公司,西安710038)
摘要:随着无人机装备的快速普及,自主控制技术越来越成为提高无人机系统生存能力、适应能力和任务完成能力的重要因素。通过对无人机实战场景和使用需求的分析,提出近期对自主控制技术应用的重要需求是提高无人机感知能力和对故障及飞行状态的适应性。分析了当前自主控制技术在外部态势、内部态势和适应性飞行控制方面的研究和应用现状。最后,根据对应用需求的分析和当前相关技术的发展应用情况的考察,提出了无人机适应性自主控制的技术框架。
关键词:无人机,自主控制,适应性控制,状态感知
0 引言
近年来,随着无人机装备的快速发展和应用,无人机技术的研究已经越来越引起学术界和工程界的关注。其中无人机自主控制技术作为无人机与有人机区别的关键技术,更是成为无人机技术中的研究热点。
目前全球实际应用中的无人机仍处于依赖遥控和预编程飞行的阶段。在美国国防部发布的最新《无人系统综合路线图2013-2038》2.4.1[2]中,明确提到“当前国防部的无人系统使用遥控方式,只有在极端情况下,如数据链失联,才进入自主模式,即执行提前编程好的指令集。”该文4.6“自主与认知行为”一节中开篇就指出当前无人系统的自主行为基本上仍为重复完全预编程的动作。表明美国装备部队的无人机的自主控制能力仍然较为基础。
尽管如此,各国不仅在学术界进行相关技术的前沿研究,在工程界也都在加紧对自主控制技术,特别是适应性技术的应用研发。据公开报道,以色列空军108部队正在为无人机开发健康管理系统。英国在其验证无人机“恶魔”上也装载了针对机载供电系统和着陆装置的健康监测系统[3]。美国海军正在与空军联合研发机载感知与躲避技术。同时,美国海军还在对包括小型无人机高强度起降以及舰上高精度定位与跟踪等舰载无人机自主控制技术进行研究[2]。
本文将从实战需求分析和自主控制技术研究现状两个方面展开研究,重点探讨无人机适应性自主控制技术在应用层面可能的发展方向。
1 需求分析
自主控制技术需求分析立足于无人机在应用方面的现状和问题,提出现阶段对自主控制技术较为迫切的需求。
1.1复杂战场适应性
考虑一个战术侦查无人机在实战中运用的典型场景[1]。首先无人机从后方起飞,穿越部队前线,规避敌方防空炮火,到某固定位置侦查或在某区域搜索移动目标,任务完成后撤离,重新回到己方阵地,最终回收。整个任务过程中,无人机要面临可能的恶劣天气如强风阵风,敌方炮火威胁,复杂电磁环境,回收场地不符合安全回收条件,甚至油料不足和自身设备故障等问题。表1为依赖遥控与预编程控制的无人机系统和具备一定适应性能力的无人机对比。

表1 战场环境下无人机适应能力对比
表1中,依赖遥控与预编程控制的无人机系统在面对飞行意外时,基本上只能依靠操作人员的经验来判断,同时由于自主控制能力的低下,系统能提供给操作人员的调整工具仅限于最基本的操作指令。实战中,这种抗风险能力低的问题会更加突出。在表1中所列自主控制能力中,自主或辅助调整控制律和自主搜索回收场地属于对外部态势的适应性;优化飞行模式,空中加油以及自主或辅助处理故障属于对内部态势的适应性。这些技术都属于无人机适应性控制技术。
1.2简化飞行操作
应用无人机系统对自主控制技术的另一需求是简化飞行操作,使其能够更多地关注决策问题或使其能同时对多架无人机进行监控,同时降低操作人员误操作的风险。
随着无人机续航能力的增强,操作人员需要长时间面对单调枯燥的监视设备。精神疲倦易引起对飞行意外反应不及时,或在搜索时漏过搜索目标等情况,导致额外风险。这种情况下,需要无人机系统对底层飞行参数具备一定的监督能力,以及对任务数据具备一定的认知能力。
在单人控制多机的情况下,对自主控制技术的需求将更加复杂。操作人员的定位将由操作者变化为监督决策者,要求无人机对起飞、回收、威胁规避、目标识别等任务具备自主完成能力。由于多机同时飞行,还会产生对无人机防撞躲避技术,时敏的多机任务规划协调体制以及更加精确灵活的飞控技术的需求。
1.3紧急状态辅助
在无人机遇到紧急情况,如意外停车,舵面控制异常,开伞失败等关系到飞行安全的重大故障和意外时,应急处理是否得当关系到飞机能否安全回收。传统的应急处理主要取决于操作人员的经验、心态和反应等素质。如果系统在此时能够给出恰当的辅助、乃至自动操作,飞机的安全性将得到很大提升。这就需要系统对无人机故障或意外判断准确,同时准备合理可靠的操作预案。
以上是在目前基础上无人机应用进一步发展对自主控制技术的大致需求分析。综合起来看,除了对无人机执行层面如飞机性能提出更高要求以外,飞行态势感知层面的技术成为实现这些技术需求的关键。
2 自主控制技术研究应用现状
根据文献[5]对无人机自主控制技术内涵的分析,适应性自主控制技术支撑主要包括:外部态势(外部资源和威胁)通信告知/部分自感知、自身态势(平台健康和能力)感知、机载健康管理系统、故障自修复、控制律重构、面向飞行状态的适应性控制、面向任务的可变模态控制、自主起降、大飞行包线、大过载、大机动、恶劣环境下的适应性控制。其中除了飞机基础性能的提高外,这些技术主要包括对内外态势的感知以及应用感知信息对飞机进行适应性控制。
2.1外部态势感知
外部态势感知目前主要包括对风、地形地理环境和地面目标的感知[5]。
无人机机载在线风场估计技术是一个早已被广泛研究的课题。基于地速等于风速加空速的矢量三角关系,使用简单的单/多步长估计[4]或动力学模型和卡尔曼滤波[7-8],飞机在平直飞行时的平面稳态风场估计已经有多种方法实现,且已经应用于当前的无人机系统。由于突发阵风和空气中小范围紊流的存在,风场估计在实际应用中无法非常精确。
即便如此,稳态风场估计也有利于飞机对飞行轨迹的控制。由于目前的中小型无人机的飞行速度较低,其飞行航迹受风影响很大。将风速纳入导航控制律参数以及航迹生成的调整过程中,将有效提高飞机跟踪航迹的能力。相关的研究如参考文献[9-10]等。
对地形地理环境的感知主要为对飞机周围地形如山地及下方地形如水面,平缓表面的感知。
对山地的感知主要来自于已有的测绘结果。飞行区域的地形是操作人员在考虑起飞、回收以及任务规划时必须考虑的问题。在任务规划阶段,利用三维数字地图,地面站位置和目标任务区域的信息,无人机系统可以给出起飞回收阶段和飞行路线规划的地形约束辅助,从而进一步实现自主起降。
对下方地形的感知主要是利用机器视觉技术判断无人机下方或前下方的地形,以实现无人机自主回收。对滑降无人机而言,飞机的视觉感知是判断跑道相对位置的重要手段。由于可以人为地给回收区域设置易识别的标志,这方面的难度可以被显著降低[6]。然而,由于滑跑回收的复杂性和对控制精度的要求,一些其他的感知手段如精确的差分卫星定位[12],基于地面的视觉感知[13]的研究也在同步进行。对伞降方式而言,视觉感知的目的在于寻找较平整的回收区域。这方面的研究如参考文献[14-15]等。
无人机目标感知也基于机器视觉技术的发展。这方面技术的研究和应用已经非常广泛,只是在工程化后的可靠性和适应性方面仍有欠缺。除了机器视觉技术本身,针对飞行与环境状态的传感器可靠性管理[16]也是态势感知的一部分,即通过对飞机飞行的气象,光线条件等环境因素的分析来估计当前目标感知结果的可靠性。目前目标感知仅止于对操作人员的提醒与辅助。
2.2内部态势感知
无人机内部态势的感知主要包括飞机健康管理和飞行状态感知[5]。
飞机健康管理系统是航空界的重要研究领域。其内涵和外延已经延伸到整个飞机系统的方方面面。涉及到的领域也包括了传感器、材料、控制、机器学习等多个学科。目前主流的无人机具备机上故障检测(BIT)能力。但更复杂的故障预判,异常检测和诊断仍处于研究试验阶段。目前的检测技术中主要有两种类型:数据驱动和模型驱动。
数据驱动技术不需要对异常或故障模式的原理有深入了解,只需要对正常和异常数据进行分析比对就能检测出异常状况。主流的算法包括神经网络、贝叶斯网络、支持向量机、模糊逻辑、回归分析等。由于机上设备繁杂,故障类型多,所以使用数据驱动技术做故障检测需要对每种类型单独分析。数据驱动技术目前仍处在部分组件的应用研究阶段,如对副翼偏斜、液压阀、传动装置的数据异常检测[11,17 - 18]。其瓶颈在于需要大量实际飞行数据,特别是故障和异常数据。这类数据的采集以及模型生成后的飞行验证都是比较困难的。然而,由于机器学习理论和应用在近年来的迅猛发展,这方面技术在今后的应用将越来越广泛。
基于模型的方法需要对设备失效和故障模式原理有清晰的了解。由于多数故障模型在设备开发时已经同步建立并完善,因此,在实现时比较容易。用于诊断的一种通用模型是时标故障传播图(Timed Fault Propagation Graph),其被用来分析各种故障发生后的系统行为[19-21]。
以上两种方法各有优劣,更可靠的方法是将两种方法结合起来。即将采集到的数据和已有知识结合,来判断可能的异常事件,即专家系统。通过对故障树(Fault Tree Analysis)或事件树(Event Tree Analysis)分析生成的专家系统可以对结构损伤[23]、动力系统[24]、燃料系统[25]、航电系统[26]等进行检测和诊断。
无人机健康管理系统技术门类繁多,技术路径广泛。许多技术都是在应用中逐渐发展完善的。长时间的实践积累才是面向应用的健康管理系统的基础。这方面的发展将是一个不断进步又相当漫长的过程。
飞行状态感知主要是对正常飞行状态的感知和确认。这种感知方式将零散的传感器数据整合在一起,生成对操作人员更友好的信息,特别是在起飞和回收阶段。状态感知技术还可以与任务规划数据结合,感知与任务相关的飞行状态[22]。从目前无人机的发展方向看,飞行感知单元将逐步发展成为未来机载信息系统的基础[1]。
2.3适应性控制系统
适应性控制系统是无人机感知到内外部态势变化后在执行层面产生反应的机构。
适应性控制系统主要面对的问题之一是增强飞控系统的容错性,即容错控制系统。其中分为被动容错和主动容错。被动容错控制即所谓健壮系统(Robust System),已经有很多成功工程应用。然而被动容错控制系统仍属于反射性的适应行为,无法真正与故障检测和诊断系统配合[28]。与之相比,主动容错控制通过获取故障信息,对飞控系统的参数甚至结构进行调整,从而达到适应性飞行的目的[29]。目前,一定程度的容错控制系统在美国波音公司的X-36,X-40A,X-45和T-33型无人机等测试平台上已经进行过成功测试[30-31]。
适应性控制系统还包括面向飞行状态和飞行任务的动态控制等。这方面的控制一方面依赖于对态势的精确感知,另一方面依赖于机器学习和参数估计方法的引入,如神经网络、模糊逻辑、贝叶斯估计、专家系统等,达到对飞行控制参数的动态调整[27,32]。从而使飞行器能在较为抽象和面向任务的飞行模式中飞行:如低空高速突防模式,高空巡航模式,长航时巡航模式等。
总体来说,适应性控制系统还处于研究验证测试阶段。没有大规模应用的原因在于目前还没有较可靠的故障检测和态势感知技术与之配合。同时参数可变乃至结构可变的控制系统本身仍处于研究阶段。
3 无人机适应性自主控制技术框架
总结以上对无人机外部感知技术,内部感知技术以及适应性控制技术的分析,在现有无人机飞行管理系统的基础上,具备一定适应性自主控制能力的无人机系统在机载和地面设备中应有一信息处理层,用于处理原始数据,指导适应性飞控系统以及进行决策操作辅助。
本文中分析的感知和自主控制技术框架如图1所示。为了突出自主控制模块,其中省略和简化了部分在传统无人机系统中已经应用的成熟模块,如传统的导航和任务管理模块等。
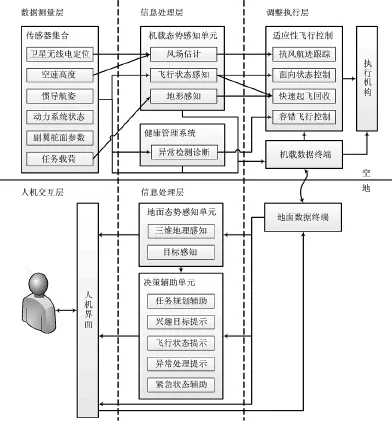
图1 无人机适应性自主控制技术框架
相比目前主流的无人机系统,操作人员仍然具备底层的数据获取和飞行控制权限。不同的是,原始数据会经过机载和地面的感知单元处理,更易于操作人员判断。多数时候,操作人员只需要关注这些信息。操作人员对飞机的指令也更趋于抽象和面向任务。飞机根据指令规划航路并进行适应性飞行。
图1展示的无人机自主控制框架基本上覆盖了第2节中分析的无人机自主控制技术需求,同时其中所列技术模块都已有相当的研究,具备一定的实验测试基础,可以考虑在未来的无人机发展中逐步应用完善。
4 结论
无人机适应性自主控制技术在目前我国的无人机发展中有现实的、迫切的应用需求。本文在分析了无人机适应性自主控制技术现实需求的基础上,考察了相关技术的研究发展现状,提出了旨在实现对故障和飞行状态具备一定适应性的无人机自主控制技术框架。对近期及中期的无人机应用技术发展具有一定参考意义。
参考文献:
[1]THEIBING N,KAHN G,SCHULTE A. Cognitive automationbased guidance and operator assistance for semi-autonomous mission accomplishment of the UAV demonstrator SAGITTA [M]. Deutsche GesellschaftfürLuft-und Raumfahrt-Lilienthal-Oberth eV,2013.
[2]United States Department of Defense.Unmanned systems integrated roadmap,FY2013-2038[M].United States Department of Defense,2013.
[3]LAWSON C P,MONTERZINO G A. Design manufacturing integration and flight testing of a health monitoring system for a prototype unmanned airborne vehicle[J].Proceedings of the Institution of Mechanical Engineers,Part G:Journal of Aerospace Engineering,2014,228(7):997-1009.
[4]屈耀红,凌琼,闫建国,等.无人机DR/GPS/RP导航中风场估计仿真[J].系统仿真学报,2009,21(7):1822-1825.
[5]陈宗基,魏金钟,王英勋,等.无人机自主控制等级及其系统结构研究[J].航空学报,2011,32(6):1075-1083.
[6]YANG W S,SEBASTIAN A. An onboard monocular vision system for autonomous takeoff,hovering and landing of a micro aerial vehicle[J].Journal of Intelligent & Robotic Systems,2013,69(1-4):499-515.
[7]BREZOESCU A,CASTILLO P,LOZANO R. Wind estimation for accurate airplane path following applications[C]//Unmanned Aircraft Systems(ICUAS),2013 International Conference on. IEEE,2013:869-874.
[8]PETHICH J,SUBBARAO K. On-board wind speed estimation for uavs[C]//AIAA Guidance,Navigation,and Control Conference,2011,10.2514/6.2011-6223.
[9]SUJIT P,SARIPALLI S,SOUSA J. Unmanned aerial vehicle path following:A survey and analysis of algorithms for fixed-wing unmanned aerial vehicless[J].Control Systems,IEEE,2014,34(1):42-59.
[10]RATNOO,A,SUJIT P B,et al. Optimal path following for high wind flights[C]//18th IFAC World Congress,Italy:Milano,2011:12985-12990.
[11]BALABAN E,BANSAL P,STOELTING P,et al,A diagnostic approach for electro-mechanical actuators in aerospace systems[C]//Aerospace Conference,2009 IEEE,2009:1-13.
[12]SMIT S J A. Autonomous landing of a fixed-wing unmanned aerial vehicle using differential GPS[D]. Stellenbosch:Stellenbosch University,2013.
[13]ZHANG Y,SHEN L,CONG Y,et al. Ground-based visual guidance in autonomous UAV landing[C]// International Societyfor OpticsandPhotonics,2013,9067:doi:10.1117/12.2052977.
[14]SHEN Y F,RAHMAN Z,KRUSIENSKI D,et al. A vision-based automatic safe landing-site detection system [J]. Aerospace and Electronic Systems,IEEE Transactions on,2013,49(1):294-311.
[15]WARREN M,MEJIAS L,YANG X,et al. Enabling aircraft emergency landings using active visual site detection[C]//FSR2013 the 9th International Conference on Field and Service Robotics,Brisbane,Australia,2013:167-181.
[16]RUSS M,SCHMITT M,HELLERT C,et al. Airborne sensor and perception management:Experiments and Results for surveillance UAS[C]// In AIAA Infotech@ Aerospace Conference 2013,Boston,MA. 2013,10.2514/6.2013-5144.
[17]FREEMAN P,BALAS G J. Analytical fault detection for a small UAV[C]// AIAA Infotech@Aerospace(I@A)Conference 2013,Boston,MA. 2013,10.2514/6.2013-5217.
[18]RASHIDY H,REZEKA S,SAAFAN A,et al. A hierarchical neuro-fuzzy system for identification of simultaneous faults in hydraulic servovalves[C]// American Control Conference,2003. Proceedings of the 2003,2003,5:4269.
[19]HOWARD L. An algorithm for diagnostic reasoning using TFPG models in embedded real-time applications[C]// AUTOTESTCON Proceedings,2001. IEEE Systems Readiness Technology Conference,2001:978.
[20]PADALKER S,KARSAI G,BIEGL C,et al. Real-time fault diagnostics[J].IEEE Expert,1991,6(3):75-85.
[21]OFSTHUN S C,ABDELWAHED S. Practical applications of timed failure propagation graphs for vehicle diagnosis[J]. Autotestcon,IEEE,2007,250(3):876-880.
[22]THEIBING N,SCHULTE A. Intent-Based UAV mission management using an adaptive mixed-initiative operator assistant system[C]// AIAA Infotech@ Aerospace Conference 2013,Boston,MA.2013,10.2514/6.2013-4802.
[23]LOPEZ I,SARIGUL K N. A review of uncertainty in flight vehicle structural damage monitoring,diagnosis and control:Challenges and opportunities[J].Progress in Aerospace Sciences,2010,46(7):247-273.
[24]ELSAADAWI AM,KALAS AE,FAWZI M. Development of an expert system to fault diagnosis of three phase induction motor drive system[C]// Power System Conference,2008. MEPCON 2008. 12th International Middle-East,2008:497.
[25]LONG H,WANG X. Aircraft fuel system diagnostic fault detection through expert system[C]// Intelligent Control and Automation,2008.WCICA 2008. 7th World Congress on,2008:7104.
[26]CHEN J,CHEN X. Research on embedded airborne electronic equipment fault diagnosis expert system[C]// Information Engineering and Computer Science(ICIECS),2010 2nd International Conference on,IEEE,2010:1-5.
[27]FENG G. A survey on analysis and design of model-based fuzzy control systems[J].Fuzzy Systems,IEEE Transactions on,2006,14(5):676-697
[28]ESPERON M M,PHILIP J,JENNIONS IK. A review of Integrated Vehicle Health Management tools for legacy platforms:Challenges and opportunities[J]. Progress inAerospace Sciences,2013,56:19-34.
[29]ZHANG Y,JIANG J. Integrated active fault-tolerant control using IMM approach[J]. Aerospace and Electronic Systems,IEEE Transactions on,2001,37(4):1221-1235.
[30]CHAMBERS J R. Partners in freedom:contributions of the langley research center to U.S. military aircraft of the 1990s [M]. NASA,2000.
[31]DUCARD GJJ. Fault-tolerant flight control and guidance systems:practical methods for small Unmanned Aerial Vehicles[M]. Springer,2009.
[32]STENGEL RF. Toward intelligent flight control[J]. Systems,Man and Cybernetics,IEEE Transactions on,1993,23 (6):1699-1717.
Requirement and Development Analysis of UAV Autonomous Control Technology
HE Ruo-fei1,LI Da-jian1,LIU Hong-juan2,LIU Hui-xia1
(1.No.365 Institute,Northwestern Polytecnical University,Xi’an 710038,China;2. Xi’an ASN Technology Group Co.Ltd,Xi’an 710038,China)
Abstract:By the fast development of UAV industry,the autonomous control technology is becoming an important factor for the improvement of UAV survival ability,adaptive ability and mission accomplishment ability. This paper analyzes the practical scenario and requirement of UAV usage and proposes that the recent important requirement for autonomous control technology of UAV is the improvement of the UAV situation perception and the adaptation to failure and flight status. This paper analyzes the current research application of the autonomous control on the external situation perception,internal situation perception and adaptive flight control. Finally,according to the analysis of the requirement and current technologies,this paper proposes a technology framework for the UAV adaptive autonomous control.
Key words:UAV,autonomous control,adaptive control,situation perception
中图分类号:V323.3+2
文献标识码:A
文章编号:1002-0640(2016)05-0001-05
收稿日期:2015-03-05修回日期:2015-05-07
作者简介:贺若飞(1982-),男,陕西西安人,博士,助理研究员。研究方向:无人机自主控制和导航控制技术。
