基于智能车模糊PI控制的研究
2016-06-02中北大学计算机与控制工程学院贾心言中北大学信息与通信工程学院高尚伟太原理工大学电气与动力工程学院陈鹏义
中北大学计算机与控制工程学院 贾心言中北大学信息与通信工程学院 曹 珹 高尚伟太原理工大学电气与动力工程学院 陈鹏义
基于智能车模糊PI控制的研究
中北大学计算机与控制工程学院 贾心言中北大学信息与通信工程学院 曹 珹 高尚伟
太原理工大学电气与动力工程学院 陈鹏义
【摘要】智能车已经成为自动控制领域内的一个研究热点,其控制系统的控制方法也越来越先进,典型的有传统PI控制和模糊PI控制,为了验证模糊PI控制方法的先进性,通过使用MATLAB软件和Simulink平台对其模型、加速性能和抗干扰性能进行仿真,实验结果表明,采用模糊PI控制,响应快速的同时超调量很小,改变了传统PI控制中响应时间和超调量总是相互矛盾的特征,并且消除误差的时间很短。
【关键词】MATLAB;Simulink;仿真;模糊PI控制
0 引言
在智能小车路径跟踪控制中目前采用的控制方法主要有常规 PI控制、模糊控制器等[1]。
模糊 PI控制把模糊控制和 PI 控制结合起来,利用模糊控制对PI 参数进行在线调整,提高了系统的动态性能[2]。改变了传统PI控制中响应时间和超调量总是相互矛盾的特征,并且消除误差的时间短,控制方法更为先进。
1 模糊PI控制系统仿真
模糊PI控制系统的仿真模型如图1所示:
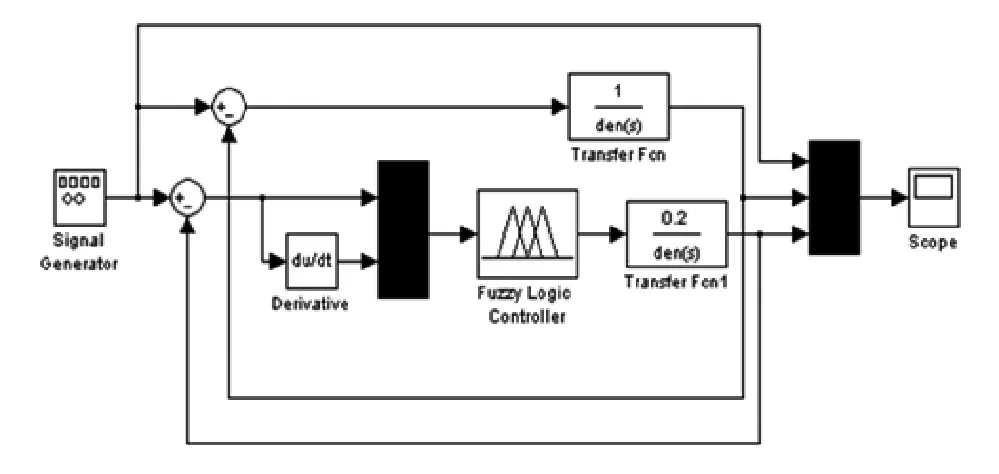
图1 模糊PI控制系统仿真图
在仿真之前,我们需要对仿真参数进行适当的修改,打开菜单“simulation”,选择下面的“configuration parameters”选项,将“zero crossing control”里面改为“disable all”,至于仿真步长,我们可以在“Max step size”中修改,如果没有很高的要求,我们可以选择“auto”,即系统自动设置步长[3]。通过这些设置我们便可以对系统进行仿真,以下是仿真结果:

图2 模糊PI控制系统的响应曲线
从图2中,我们可以得知模糊PI控制系统的动态性能如表1所示:

表1 模糊PI控制系统的动态性能指标 单位:(ms)
作为更高级别的控制系统,模糊PI控制的智能车系统,应该具有更好的跟随性能和抗干扰能力,首先必须满足这两项基本指标,才有可能再开发出更好更加优越的特性[4]。这两项指标也是反应其基本稳定性能的重要依据之一,所以,我们必须要对这两项性能进行测试,利用之前的测试方法,测试如下:
(1)加速性能:车的行驶归根结底就是速度的控制,当人或系统发出速度指令之后,系统能不能快速稳定的响应速度信号,达到控制要求,这密切关系着车行驶的高效性,以及能源的节约性。在这里,当系统响应稳定之后,在输入信号处再加上一个幅值为1的阶跃信号,模拟车的加速信号,仿真结果如下图3所示:
从图3中可以分析出,智能控制系统对加速信号的跟随性能可以实现快速稳定精确等特点,其相应曲线甚至比起动性能还要好,这充分体现了智能控制拥有其它控制方式所不具备种种优势。

图3 模糊PI控制系统加速响应曲线
(2)抗干扰能力:现实中有太多的不确定性,这样就导致有太多的干扰信号,对于这些不确定性的干扰信号,无法逐一将其考虑在控制规则之中,所以提出抗干扰能力就显得尤其重要。下面就将脉冲信号作为一个干扰源,加在一个稳定之后系统之上,看其对干扰的响应和抑制能力,所加信号为幅值为1,宽度为0.8ms的脉冲信号。仿真结果如图4所示:
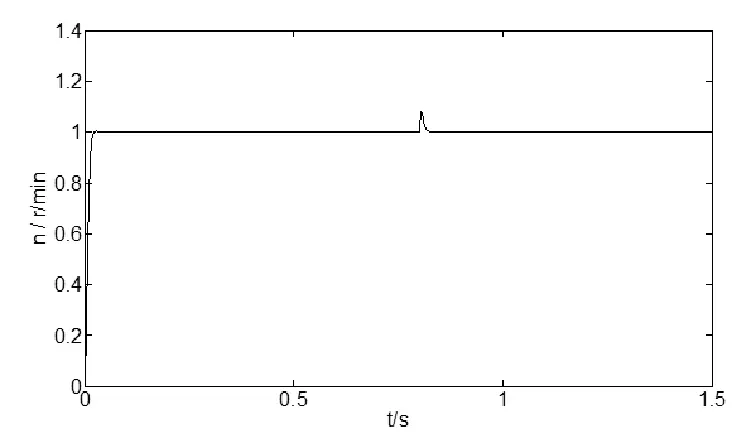
图4 模糊PI控制系统抗干扰响应曲线
通过对图4的分析,我们可以计算出,其波动量为0.08 ,波动百分比为8%,恢复时间为12ms,从恢复时间可以看出,系统能够在短时间内消除干扰,恢复到稳态,从而保证系统的稳定性,进而增加智能车的安全系数。
2 结论
通过运用Simulink进行模糊PI控制的仿真,分析得出模糊PI控制的优点。模糊PI控制方法灵活、方便、可观性强,并可在Simulink环境中非常直观地构建各种复杂的模糊PI控制系统。模糊PI控制具有控制灵活、超调小、响应快和适应性能强的优点。对于智能小车,将模糊PI作为控制方法,将极大的满足智能车系统的各项控制要求,从而将其作为智能车研究的重要内容,是必须的也是必然的。
参考文献
[1]刘进,齐晓慧,李永科.基于视觉的智能车模糊PID控制算法[J].兵工自动化,2008,27(10)﹕67-69.
[2]董宗祥,石红瑞,杨杰.嵌入式智能小车测控系统的设计与实现[J].计算机测量与控制,1671-4598(2010)02-0357-03.
[3]徐国华,谭名.移动机器人的发展现状及其趋势[J].机器人技术与应用,2001,(3)﹕7-14.
[4]李磊,叶涛,谭民等.移动机器人技术研究现状与未来[J].机器人ROBOT,2002,24(5)﹕475-480.