间接矢量控制的系统设计与参数整定
2016-04-18詹庄春
詹庄春
华南农业大学珠江学院信息工程系,广东广州,510900
间接矢量控制的系统设计与参数整定
詹庄春
华南农业大学珠江学院信息工程系,广东广州,510900
摘要:基于矢量变换原理,改进系统仿真模型,引入新方法整定控制参数,提高间接矢量控制技术应用水平。依据系统的近似动态结构及其简化处理,按工程设计方法估算转差频率控制器的参数。再结合计算机辅助设计和经验调试方法,进一步优化PID参数。系统通过测试,显示出较高的调速性能和较强的稳定性,且控制器参数的调节范围很宽。
关键词:间接矢量控制;转差频率;仿真设计;参数优化
间接矢量控制系统结构简单,控制策略优越,得到了广泛的应用[1]。关于矢量控制系统的文献很多,均侧重于如何进一步提高调速性能的理论研究与实践,而简化了建立系统仿真模型及其控制器参数估算的过程。本文旨在结合间接矢量控制系统的具体模型,整定控制器参数,展示一个系统仿真的实现例程,从而提高间接矢量控制技术的应用水平。
1按转子磁场定向的矢量控制原理
以旋转磁动势不变为前提,在三相静止坐标系下的感应电机定子交流电流通过坐标变换可等效为同步旋转坐标系下的二相直流电流,原交流电机的转子总磁通等于直流电机磁通。按等效直流调速系统给定的励磁电流和电枢电流,加上磁场相位角,经过反坐标变换,其信号加在变频控制器上,就可得到交流调速电机所需的三相变频电流。
综合上述,可看出矢量控制具有:电流和磁场相位角需协调控制,在动态过程中也需保持磁通恒定的特点。
2间接矢量控制系统模型设计
2.1间接矢量控制系统结构原理
基于异步笼型电机在同步旋转坐标系下的数学模型,矢量控制基本方程为:

(1)

(2)
(3)
式中,ψ2为转子总磁链,Lm为定转子互感,T2=Lr/R2为转子励磁时间常数,Lr为转子自感,R2为转子电阻,p为微分算子,ism为定子电流励磁分量,Te为电磁转矩,np为磁极对数,ist为定子电流转矩分量,ωs为转差频率。
当ψ2达到稳态值时,有:
ψ2=Lmism
(4)

(5)
由式(4)可知,ψ2唯一决定于ism;由式(5)和式(2)可知,Te、ist与ωs之间均存在线性关系。
从稳态特性出发,间接矢量控制调速系统采用磁链开环和转差频率控制,其结构和原理如图1所示[2]。

图1 间接矢量控制系统结构原理图
通过反馈,转速调节ASR(即转差频率控制)采用PID控制,其输出为给定转矩电流;给定励磁电流可保持转子总磁通稳态值不变,它与给定转矩电流一起,加上磁场相位角,经任意二相旋转坐标系/三相静止坐标系的数学变换,输出给定三相变频电流,作为电机的控制信号;电机主控电路采用正弦波脉冲宽度调制逆变器。不难预测,该系统有较高的调速性能,而且结构简单,控制策略优越。
2.2电机主控单元模块设计
如图2所示,主控采用交-直-交电力电子逆变装置实现,电机选用三相鼠笼异步电机,Ld为电流滤波电感[3],pulse为控制端输入脉冲,Step为电机测试转矩的阶跃输入,m为电机运行参数检测输出端。

图2 电机主控单元模型
2.3矢量变换模块设计
如图3所示,函数f(u)输出给定转差频率,其值与被测转速角频率相加,然后乘以磁极对数再积分,得到磁场相位角;相位角配合电流,经dq0_to_abc坐标转换,最后得到给定三相变频电流。
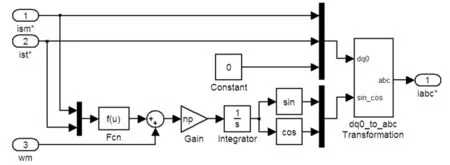
图3 矢量变换模型
2.4转差频率控制模块设计
如图4所示,PID控制器经限幅输出给定转矩电流。
整合以上各模块,可得间接矢量控制系统仿真模型,见图5。转速角频率通过电机多功能检测仪输出至输入端,与给定转速角频率比较,构建反馈系统。另外,电机运行输出信号一方面可采用示波器显示,另一方面可输出到Matlab的工作空间。

图4 转差频率控制模型

图5 间接矢量控制系统仿真模型
3转差频率控制器的参数估算
3.1间接矢量控制系统动态结构
以下建立系统动态结构图,假定条件为:忽略铁损,忽略旋转电动势对动态的影响,转子总磁通保持动态恒定,每个环节的输入输出关系均为线性的。
首先,PWM技术基于面积等效原理,采用全控型器件,故其传递函数近似为:

(6)
其次,考虑到产生磁场相位角所需的正反馈闭环传递时间,设为Tθ[4],矢量变换的传递函数近似为:
(7)
再次,三相桥式逆变电路一般采用120°导电型,在同一时刻,只有两个全控器件导通,对于星形电机绕组,则只有两相导电。令:



则电机主控制部分的传递函数近似为:

(8)
最后,根据电机基本运动方程,有:

(9)


(10)
空载时,系统动态结构的简化如图6(b)所示。

图6 系统近似动态结构图及其简化
3.2按工程设计方法估算控制器参数
令T∑=2Ts+Tl,为增强抗扰性能,转差频率控制环按典型Ⅱ型系统设计,ASR可选择PI调节器:
(11)
(12)
按工程设计方法估算出来的值很粗略,不妨再增加一个微分环节,其微分系数按临界比例度法[5]设置为:
(13)
则式(11)~(13)可为下面的PID参数优化设计提供初始值。
3.3按优化设计方法优化控制器参数

图7 PID参数优化设计模型
所拟用Matlab7.1/SimulinkResponseOptimization中的SignalConstraint模块,为非线性/线性控制器优化设计和仿真提供了有效手段。使用时,先建立系统模型,并定义模型参数及PID初始值[6],然后将优化模块连接到待控制的信号下,如图7所示。设计步骤如下:
(1)设置仿真求解器及仿真时间;
(2)根据系统要求的性能指标设置阶跃响应特性参数;
(3)设置待优化的参数;
(4)启动优化,读取参数优化值。
注意:优化值并不是控制器参数的最终整定结果,因为优化值的精准性有赖于系统模型的精确性。因此,在此基础上还需按经验调试方法对PID参数进一步微调。
4系统仿真测试
在Matlab/Simulink环境下,对电机等各模块参数进行设置[7],如表1所示。
将已知数据代入式(11)~(13),则可求出PID参数估算值以及PID参数优化值和经验整定值(表2)。其中,优化模块设置为:上升时间为1.5,调整时间为3.0,超调量为10,其他均为默认状态;然后设置单位阶跃为[0,0,1],限幅器为[-3,3]。另外,经验调试的依据是优化值的变化趋势及各参数之间的相互影响。

表1 电机等模块参数的设定值

表2 PID参数的设定值
系统仿真时间设置为[0~4],求解器选择ode23tb,仿真结果如图8所示。串级调速系统输出结果如图9所示[8]。通过比较可知,间接矢量控制系统的调速性能远远优于串级调速系统的调速性能。
5结束语
(1)按工程设计方法进行控制器的参数估算时,系统的结构模型应尽可能地简化,而当进行参数优化时,则不需要。
(2)与串级调速系统的双闭环相比,间接矢量控制系统采用的是单闭环,而调速性能明显优于前者,且控制器参数的调节范围较宽,原因是通过矢量变换,其电磁转矩与电流在很大程度上实现了解耦,在动态过程中表现为近似的线性关系。

图8 间接矢量控制系统的调速性能效果图

图9 串级调速系统的调速性能效果图
参考文献:
[1]张杰,柴建云,孙旭东,等.基于参数在线校正的电动汽车异步电机间接矢量控制[J].电工技术学报,2014,29(7):90-103
[2]陈伯时,陈敏逊.交流调速系统[M].3版.北京:机械工业出版社,2013:1-190
[3]马小亮.高性能变频调速及其典型控制系统[M].北京:机械工业出版社,2010:1-303
[4]刘军华,李春茂,褚丽丽.转差率控制的异步电动机调速系统的设计[J].电气传动,2008,38(5):22-24
[5]曾贵娥,邱丽,朱学峰.PID控制器参数整定方法的仿真与实验研究[J].石油化工自动化,2005(4):20-23
[6]滕青芳.基于NCD工具箱的非线性系统PID控制器优化设计[J].电气传动自动化,2002,24(3):32-34
[7]纪志成,薛花,沈艳霞.基于Matlab交流异步电机矢量控制系统的仿真建模[J].系统仿真学报,2004,16(3):384-389
[8]詹庄春.工程设计方法在串级调速系统中的应用[J].韶关学院学报,2014,19(10):43-47
(责任编辑:汪材印)
中图分类号:TP273
文献标识码:A
文章编号:1673-2006(2016)01-0115-04
作者简介:詹庄春(1978-),江西鄱阳人,硕士,讲师,主要研究方向:电气自动化。
收稿日期:2015-08-25
doi:10.3969/j.issn.1673-2006.2016.01.032
