利用保罗机械阱探究囚禁粒子的动力学特性
2016-03-07何雨华
冯 禹,习 爽, 何雨华,倪 晨,顾 牡,赵 敏
(同济大学 物理科学与工程学院,上海 200092)
利用保罗机械阱探究囚禁粒子的动力学特性
冯禹,习爽, 何雨华,倪晨,顾牡,赵敏
(同济大学 物理科学与工程学院,上海 200092)
摘要:在自制保罗机械阱上利用运动视频分析软件Logger Pro分析囚禁粒子的运动轨迹,形象地展现了囚禁粒子在势阱中的不同运动状态. 实验测得失稳临界值2q=0.989. 稳定条件下粒子被束缚在环形带中,且q与跃动系数正相关. 粒子失稳按指数规律变化,在运动后期,摩擦力导致的失稳明显显现.
关键词:保罗机械阱;非线性动力学;赝势;Logger Pro

指导教师:何雨华(1959-),男,上海人,同济大学物理科学与工程学院高级实验师,学士,主要从事物理实验教学工作.
离子阱是研究量子理论重要的实验装置. 利用多极电势构成三维势阱,将离子稳定地囚禁在几乎与外界隔离的空间几何构型中的实验方法,称为离子囚禁技术[1]. 离子阱技术因其优良的特性和先进的功能,逐渐形成了一片新型广阔的研究领域,如在量子信息[2-3]、量子计算逻辑门[4-5]、离子阱频标[6]、大规模光谱测量[7-8]等研究中具有广泛的应用. 囚禁粒子动力学特性及其稳定条件是离子阱研究的基础,但是四极离子阱的结构复杂,不宜直观地了解离子在其中的各种运动过程及离子的稳定性分析. 德国玻恩大学Wolfgang Paul教授利用可以旋转的对称马鞍面装置分析了离子在势阱中的运动规律,故将此装置命名为保罗机械阱[9]. 保罗机械阱的结构简单,实验现象清楚直观,适合于进行单粒子在曲面运动规律的实验探究和演示.
1实验设计
1.1 运动的稳定条件
在与马鞍面同步转动的参考系中,容易得到马鞍面中重力势场为

(1)
其中h0为鞍点到马鞍面最高点的垂直距离,r0为对称马鞍面的投影面半径,x0和y0为旋转参考系中的坐标. 通过对(1)式乘以旋转矩阵可以得到在实验室坐标系下的势能方程为

2xysin (2Ωt)],
(2)
其中Ω为马鞍面旋转的角频率.
对实验室参考系中的势场求负梯度,建立粒子运动的动力学方程组,可解出粒子的轨迹方程为[10]
z(τ)=(Ae+β+τ+Be-β+τ+Ce+β-τ+De-β-τ)eiτ,
(3)
其中τ为运动时间与旋转频率的乘积,β由马鞍面的形状与旋转速度决定:
(4)
τ=tΩ.
(5)
由(4)式可知,β为幂指数,要使上述解不发散,则β必须为纯虚数,方便起见令
(6)
要使所有β±为纯虚数,则q应满足
(7)
当2q≥1时,幂指数β为实数,此时解是发散的;当2q<1时,幂指数β为虚数,此时粒子的运动方程为稳定的周期运动. 在实验中可以通过调节转速来改变q:当马鞍面的转速增大时,2q的值减小,则粒子更容易处于稳定状态. 此外粒子的稳定条件与马鞍形状有关,投影面半径越大,马鞍半径越小,更容易实现粒子俘获.
1.2 动力学方程的定解条件
通过对(3)式求导,可以得到4个线性无关的方程组:
A+B+C+D=z0,
(8)
iμ+(A-B)+iμ-(C-D)=v0-iz0,
(9)

(10)


(11)
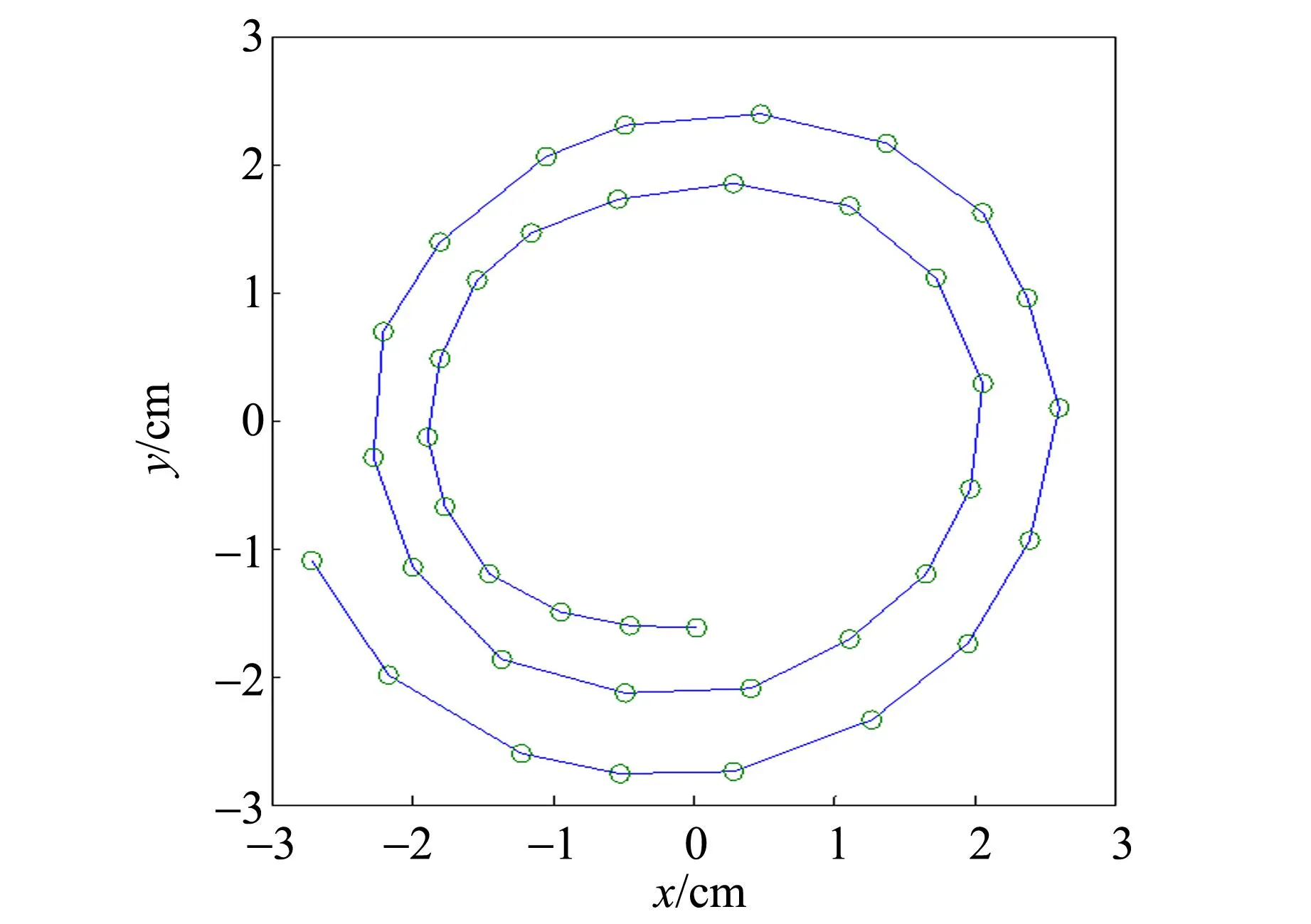
只要知道z0,v0和q,便可以求解线性方程组,从而确定参量A,B,C,D,得出囚禁粒子的运动轨迹. 当初始条件为z0=1.00 cm,v0=0.01 m/s,q=0.05时,计算粒子运动轨迹,如图1所示.
(a)短周期
(b)长周期图1 不同时间周期下粒子的运动轨迹
不难发现,计算结果与四极离子阱中囚禁粒子的运动轨迹相似[11]. 从图像中可以看到,囚禁在势阱中的粒子一方面在进行频率较高的跃动,同时又存在对称于鞍点周期较长的振动.不仅如此,粒子的运动轨迹在平行于马鞍面内以周期为q2Ω转动. 这样根据运动形式将囚禁粒子的运动分为高阶微振动、谐振运动和长周期转动. 当马鞍面的转速较高时,高阶微振动振幅较小,此时可近似视为粒子在谐振势场中的运动. 当马鞍的转速较低时,高阶微振动不可忽略,此时粒子的运动轨迹为上述3种运动的合成. 接下来将通过实验分析在稳定条件下囚禁粒子的运动轨迹.
2实验开发
2.1 稳定条件的验证
实验装置如图2所示. 马鞍面固定在旋转台上,通过皮带传动装置及马达与电源相连接,旋转台的转速可通过改变负载两端的电压进行调节.旋转周期由光电门读出.马鞍面的参量为r0=20.95 cm,h0=5.29 cm,负载电压可调范围为0~10 V,旋转台可调控最高转速为16 r/s. 实验中,通过改变马鞍面的转速来改变系统的q值.当转速稳定时将小球垂直放入鞍点,并利用计时器记录小球放入至飞出马鞍面的时间.

图2 实验装置图
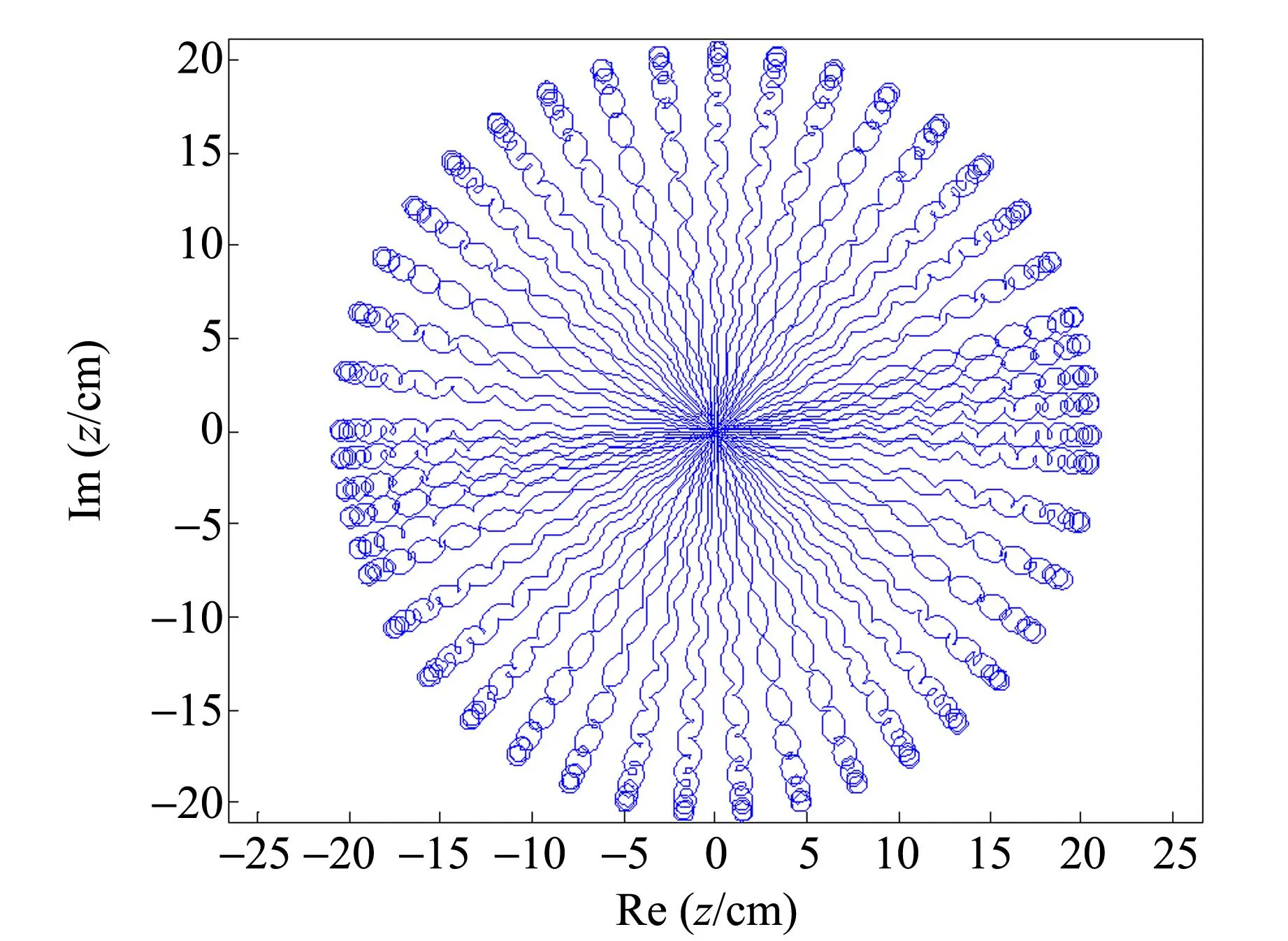
为了减小放入时由于初始条件不同引起的偶然误差,对每组确定的转速重复多次实验,取小球的最长稳定时间与q值作图. 实验结果见图3,图中虚线代表理论临界值2q=1. 实验发现在临界值两侧,小球的运动发生了失稳,实验测得的失稳临界值为2q=0.989,相对偏差为1.1%. 理论模拟中,可明显发现粒子的运动轨迹由封闭的曲线变为发散. 图4分别给出了q=0.499 9与q=0.500 1的粒子运动轨迹.
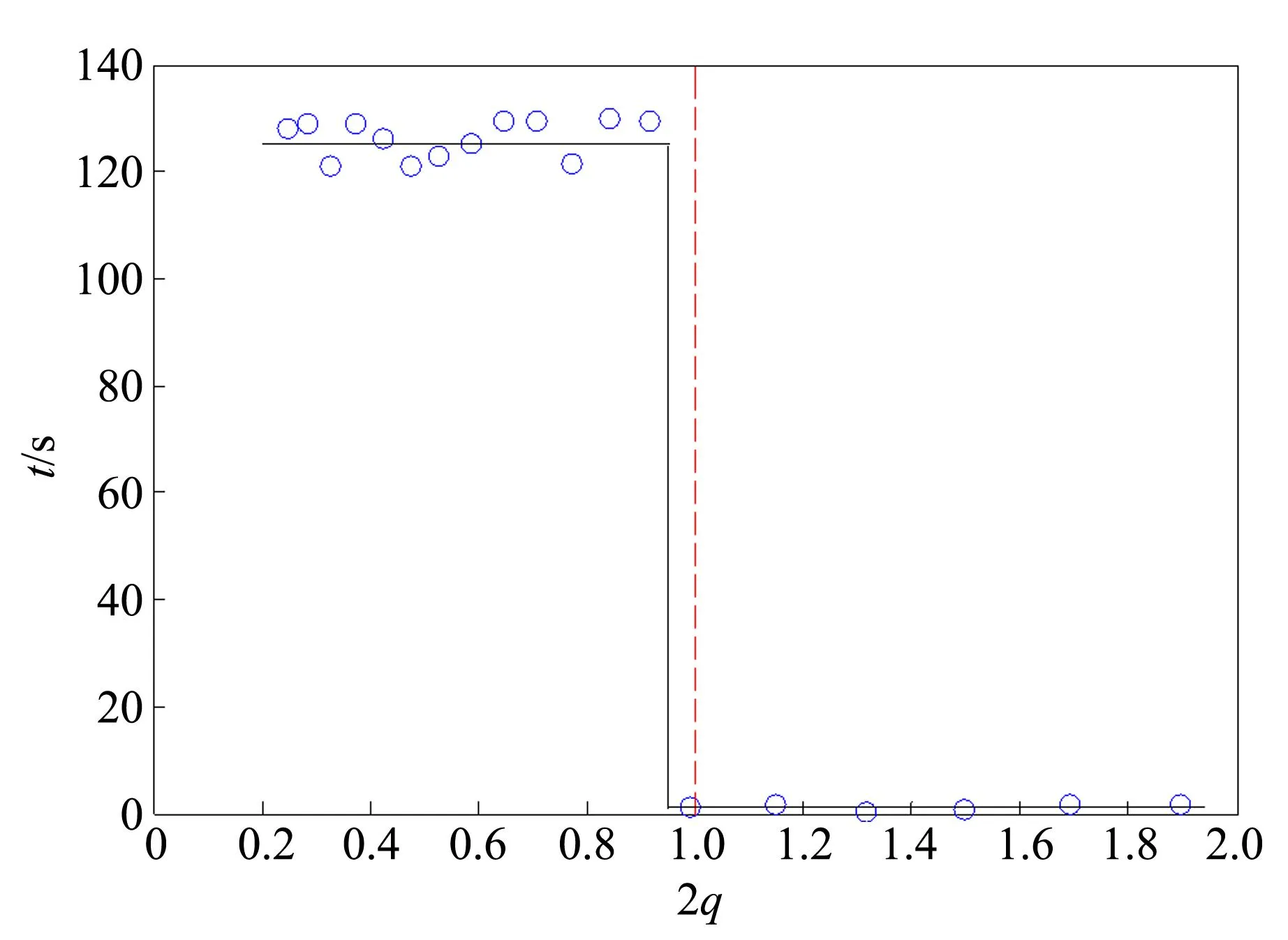
图3 粒子稳定时间的实验验证图

(a)q=4.999 9
(b)q=0.500 1图4 临界条件下粒子运动轨迹图
同时,我们发现实验中即使满足2q<1,粒子并不能一直处于稳定状态,这是由于摩擦力引起的失稳现象.
2.2 稳定条件下粒子运动轨迹的实验验证
我们不仅仅满足于确定粒子在何种情况下会保持稳定,更希望知道粒子在稳定条件下是如何运动的,前面已经给出了粒子的运动方程,现在将用实验的方法得到粒子的运动轨迹.
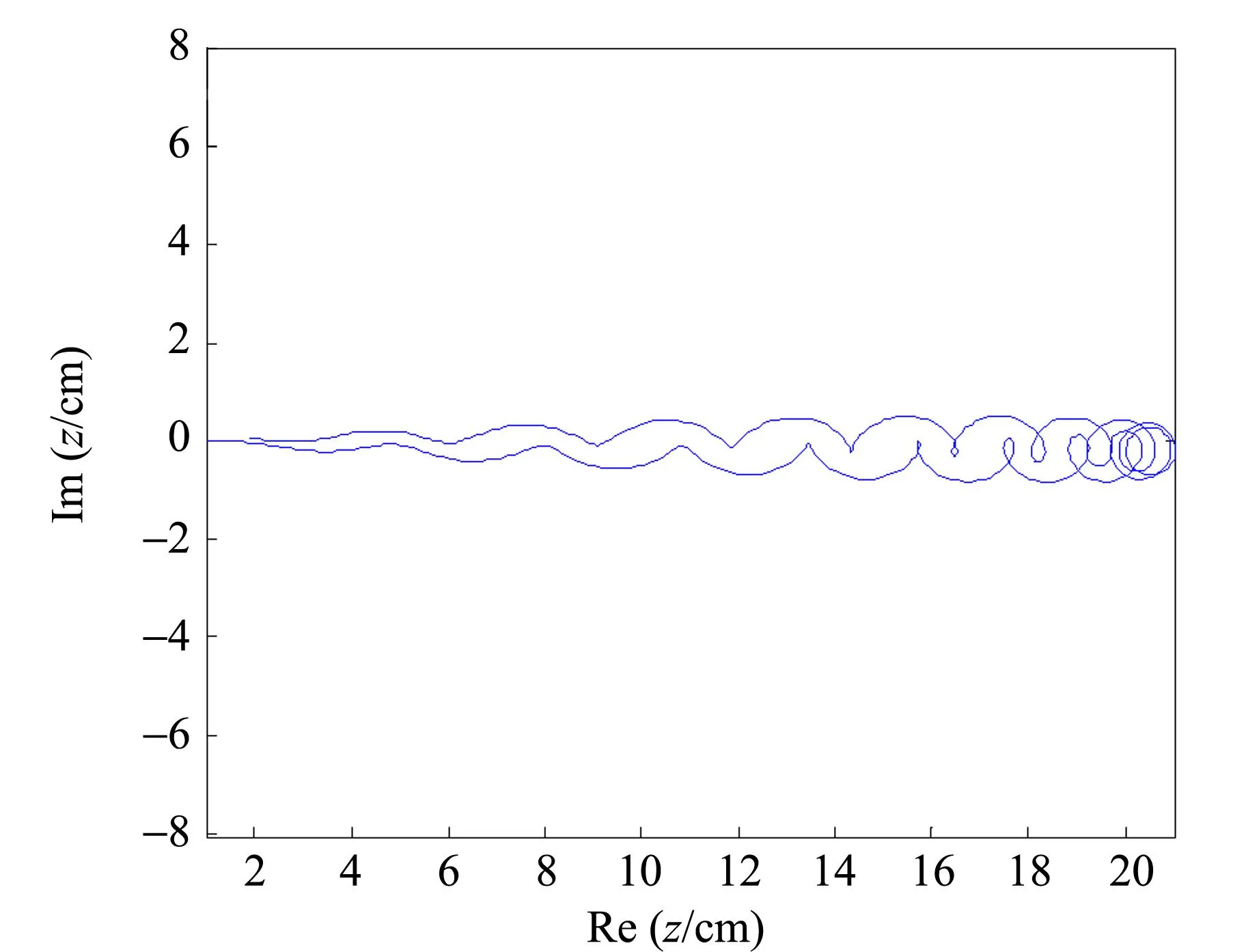
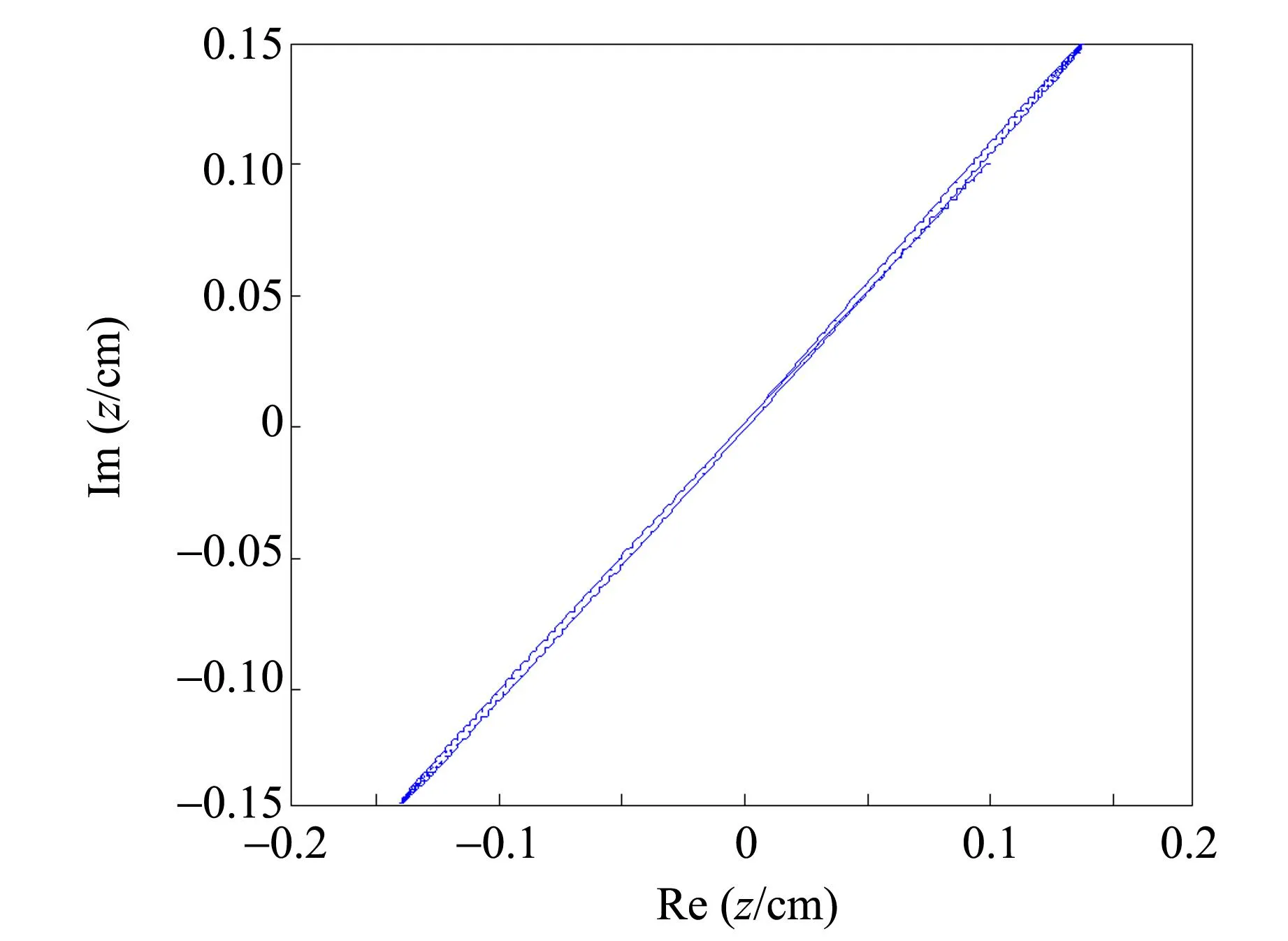
实验中用摄像机记录小球的运动轨迹,利用Logger Pro[12]软件将粒子运动的视频导入分析,可以得到粒子的初始位置、初始速度以及稳定条件下的运动轨迹. 在相同条件下进行计算模拟,初始条件为z0=0.14 cm,v0=0.03 cm/s,r0=20.95 cm,h0=5.29 cm,对比如图5所示.
(a)模拟轨迹
(b)实际轨迹图5 稳定条件下粒子运动轨迹的实验对比图
通过图5的对比,可发现粒子轨迹被束缚在环形内,理论轨迹中该环形的内径与外径与实际情况符合较好. 但是环形的束缚带只是由初始条件决定的一种特殊的囚禁模式.
2.3 粒子不同时间周期下运动的分析与讨论
在保罗机械阱中,粒子做谐振运动的运动方程为[13]
(12)
即粒子在二维平面上做角频率为qΩ的简单谐振子运动,其轨迹为频率比为1∶1的李萨如图形,初始相位差由粒子的初始条件决定.
实验中发现,当q≪1时,粒子的高阶微振动便可以忽略. 定义在环形囚禁带的情况下,粒子的跃动系数为环带宽度与粒子高阶微振动的模长的比值,即
(13)
其中d为环带宽度,可以预见,q减小时,S也随之减小. 图6给出了不同q下跃动系数的变化规律,模拟的初始条件为z0=0.10 cm,v0=0.
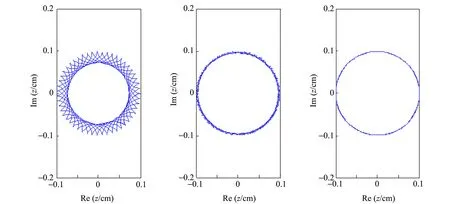
(a)q=0.45 (b)q=0.045 (c)q=0.004 5图6 不同q值对高阶微振动跃动系数的影响
从图6可看出,q与S呈正相关关系,当q→0时,粒子的高阶微振动也随之消失. 但是粒子的运动不仅仅是简单囚禁在圆环内,这由粒子的谐振运动所决定. 粒子的谐振运动轨迹为频率比为1∶1的李萨如图形,其运动轨迹方程为
(14)
在复平面内,粒子运动的相位差由粒子初始释放位置决定:
(15)
不同的相位差决定了粒子的谐振运动为圆、椭圆以及直线. 但是在实验中发现,即使在很小q下,粒子的轨迹依然不是稳定的李萨如图形,而是会有以鞍点为中心、频率为q2Ω的转动,这构成了粒子的长周期转动. 在高速的马鞍转动下,粒子的高阶微振动退化,在短时间内,粒子的长周期转动无法显现,此时粒子的轨迹主要表现为李萨如图形. 下面分别给出了初相位差为零的囚禁粒子谐振运动轨迹和长时间下的长周期转动轨迹,如图7所示. 文献[13]中囚禁粒子运动的二维投影与此相同.模拟的初始条件为z0=0.1+0.1i,v0=0,q=0.01.
一般情况下,粒子的谐振运动轨迹为椭圆,高阶微振动跃动系数也不为零,加之整个轨迹围绕鞍点转动,这3种周期运动的叠加,便构成了图1所示的一般运动轨迹.
(a)谐振运动

(b)长周期转动图7 囚禁粒子的谐振运动和长周期转动
2.4 摩擦力对囚禁粒子运动的影响
μ为小球与马鞍面之间的摩擦系数,则在该体系中摩擦力的形式为
(16)
加入摩擦力项的运动轨迹为
z(τ)=[Ae(+β++ε)τ+Be(-β++ε)τ+
Ce(+β-+ε)τ+De(-β-+ε)τ]eiτ,
(17)
其中
(18)
(18)式的值总为实数,因此在足够长的时间,总会引起解的发散,这也是实验中粒子无法一直保持稳定的原因.
利用Logger Pro软件将临近失稳状态的粒子运动视频导入分析,得到其运动轨迹,并在相同条件下进行计算模拟,初始条件为z0=1.02 cm,v0=0.03 cm/s,结果如图8所示.
(b)临近失稳条件下的粒子运动轨迹图8 临近失稳阶段粒子的运动轨迹与计算模拟对比
由于粒子的失稳是按指数规律变化的,因此实验中常常看到的现象是稳定运动的小球突然快速脱离马鞍,而其在前期运动的轨迹更接近无摩擦力计算模拟下的轨迹,只有在运动的后期,摩擦力导致的失稳才会明显地表现出来.
3结束语
保罗机械阱形象直观地展示了四级离子阱俘获粒子的概念和原理,将抽象的物理模型,以生动且有趣的实验形式呈现. 实验中通过运动视频分析软件Logger Pro捕获粒子运动轨迹,为学生提供了处理动力学问题的新方法和手段. 借助于Matlab使枯燥的理论推导可视化,将数学推导与物理分析紧密结合,有助于培养学生解决一般性物理问题的综合能力. 实验中宏观与微观之间的类比,能够很好地激发学生的探究兴趣,从而实现创新思维的培养,也为教师提供了微观现象教学与演示的新思路.
参考文献:
[1]Hasegawa T, Bollinger J J. Rotating-radio-frequency ion traps [J]. Physical Review A, 2005,72(4):043403.
[2]Steane A, Roos C F, Stevens D, et al. Speed of ion-trap quantum-information processors [J]. Physical Review A, 2000,62(4):042305.
[3]David S, Brochard J, Steane A M. Simple experimental methods for trapped-ion quantum processors [J]. Physical Review A, 1998,58(4):2750.
[4]Barenco A, Deutsch D, Ekert A, et al. Conditional quantum dynamics and logic gates [J]. Physical Review Letters, 1995,74(20):4083.
[5]Zhang X D, Zhang Q H, Wang Z D. Physical implementation of holonomic quantum computation in decoherence-free subspaces with trapped ions [J]. Physical Review Letters, 2006,74(3):034302.
[6]罗学立,朱熙文. 离子囚禁技术与量子计量基准的新进展[J]. 物理,1996,25(9):539-543.
[7]Kreuter A, Becher C, Lancaster G P T, et al. Experimental and theoretical study of the 3d2D-level lifetimes of40Ca+[J]. Physical Review A, 2005,71(3):032504.
[8]Barwood G P, Huang G, Klein H A, et al. Subkilohertz comparison of the single-ion optical-clock2S1/2-2D5/2transition in two88Sr+traps [J]. Physical Review A, 1999,59(5):R3178.
[9]Paul W. Electromagnetic traps for charged and neutral particles [J]. Reviews of Modern Physics,1990,62(3):531-540.
[10]Thompson R I, Harmon T J, Ball M G. The rotating-saddle trap: a mechanical analogy to RF-electric-quadrupole ion trapping [J]. Canadian Journal of Physics, 2002,80(12):1433-1448.
[11]March R E. An introduction to quadrupole ion trap mass spectrometry [J]. Journal of Mass Spectrometry, 1997,32(4):351-369.
[12]Vernier software & Technology [EB/ON]. http://www.vernier.com.
[13]Forbes M W, Shari M, Croley T, et al. Simulation of ion trajectories in a quadrupole ion trap: a comparison of three simulation programs [J]. Journal of Mass Spectrometry, 1999,34(12):1219-1239.
[责任编辑:任德香]
Study on the dynamics of trapped particles
using the rotating-saddle trap
FENG Yu, XI Shuang, HE Yu-hua, NI Chen, GU Mu, ZHAO Min
(School of Physics Science and Engineering, Tongji University, Shanghai 200092, China)
Abstract:Using the motion video analysis software Logger Pro, the motion of particles in self-made rotating-saddle trap was analyzed, and different motion states were shown. The critical value of neutral stability was 2q=0.989. The particles were bound in girdle in the stable state, andqand vigor coefficient were positively correlated. The destabilization of the particle appeared to obey an exponential rule, and in the late phase of the motion, obvious destabilization caused by friction force occurred.
Key words:rotating-saddle trap; nonlinear dynamics; pseudopotential; Logger Pro
作者简介:冯禹(1995-),男,甘肃庆阳人,同济大学物理科学与工程学院2013级本科生.
收稿日期:2015-11-02;修改日期:2015-12-23
中图分类号:O317
文献标识码:A
文章编号:1005-4642(2016)02-0001-06