基于ARM的危化品仓库堆垛安全距离监测装置的研究与开发
2016-03-02刘学君帆2栾海英京2
刘学君,江 帆2,,戴 波,栾海英,李 京2,
(1.北京石油化工学院,北京 102617;2北京化工大学,北京 100029;3.北京机械工业自动化研究所,北京 100120)
0 引言
危险化学品仓库由于本身存储危险品,如有处理不当,容易发生重大事故[1]。在保证危化品仓库安全的各项指标中安全距离是一项重要指标,仓库中堆垛过高过密,容易产生反应热的聚集和不同危化品的混存,造成很大的安全隐患[2]。在国家制定的《常用危险化学品贮存通则》和《易燃易爆性商品储藏养护技术条件》中对危险化学品储存堆垛的安全距离有严格的限制,然而在执行中监管部门缺乏实时高效的监测手段。
目前,针对危险化学品储存堆垛的安全距离的监测方法有视频监控、室内定位技术、基于图像的三维重构。视频监控[3]是目前大多数仓库采用的方法,通过在仓库地面给每个垛位画定安全区域就可大致判断堆垛的安全距离是否符合规定。这种方案的优点是技术成熟、价格低廉、易于安装,然而,该技术也存在一些弊端,目前的视频监控系统主要依靠监控人员进行人工监控,由于监控系统汇集了大量的视频,存在人员易疲劳、很难实时监控每路视频、报警精确度差、误报和漏报现象多、报警响应时间长、录像数据分析困难[4]。室内定位技术主要包括Wi-Fi(Wireless Fidelity)定位蓝牙、射频识别、ZigBee、红外线定位、超声波定位技术、超宽带(UWB)等,可以通过定位每个堆垛位置的方法确定安全距离是否符合标准,然而这些技术都存在定位精度不够的缺陷[5],其中定位精度最高的是超宽带技术,能达到5~45厘米,误差太大,不适用安全距离的监测。基于图像的三维重建[6]方法,是利用双目或多目相机获取监控区域环境图像,依据立体视觉原理[7]计算区域目标的结构和三维位置,在界面上显示出双目立体视觉的效果,该方法可以细致地复现仓储的细节情况,具有场景还原真实度高,重建速度快的优点,但受限于当前摄像机电子器件的性能,存在摄像范围小、功耗大、分辨率易受光源干扰等问题[8],高昂的成本也使得该应用难以在大型仓库的可视化模拟中推广。
针对以上方法的不足,研发了一种基于ARM的危化品仓库堆垛安全距离的监测装置,设计了上位机软件和通信协议,能够迅速判断每个堆垛安全状态,将问题垛位的信息上传,从而确保了监管部门对危化品仓库堆垛安全距离的有效监测。
1 监测原理
危化品仓库堆垛安全距离指堆垛的垛距、墙距、柱距、灯距、梁距等五距,根据国家对危化品仓库五距的要求,划定每个堆垛的安全区域,利用激光测距仪对每个监测面周期性扫描监测,同时通过编码器获得相应的角度值,当有堆垛超出安全边界时,激光测距仪受到遮挡,在同一角度的距离值产生变化,就可以根据对应的判定规则确定是否报警。堆垛安全距离监测原理图如图1所示。
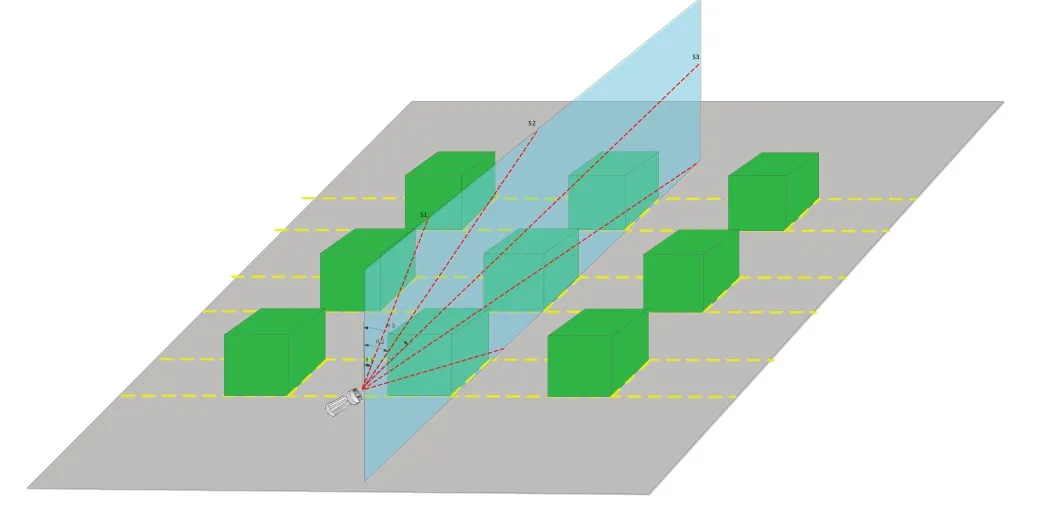
图1 堆垛安全距离监测原理图
2 安全距离监测装置的设计
安全距离监测装置的设计主要包括三个部分:控制板的设计、安全距离监测程序编写、步进电机驱动器选型。控制板包括MCU及相关硬件电路,主要实现信号的处理和命令的发布;安全距离监测程序实现对堆垛安全状态的判断;步进电机驱动器实现控制板对步进电机的精确控制。上电后MCU产生周期性的方波信号发送给驱动芯片,经驱动芯片细分之后控制步进电机的运动,同时步进电机通过蜗杆带动云台上的激光测距仪的扫描和云台下的编码器的运动,将扫描得到的距离值和对应的角度值通过RS-232总线发送,MCU对接收到的信号进行处理分析,根据预设的程序判断堆垛安全距离是否正常,并将相关信息通过CAN总线传输到远端的主控节点。安全距离监测装置架构如图2所示。
2.1 控制板硬件电路的设计
控制板负责向驱动板、编码器供电,向驱动板发送指令,分析处理来自激光测距仪和编码器的数据。控制板主要包括MCU、电平转换芯片、CAN收发器、整波器、EEPROM 数据存储器、电源模块。
MCU的选型。本系统选择TI公司的TM4C123GH6PM作为板载的MCU。TM4C123GH6PM是基于ARM Cortex-M4内核的MCU,该MCU最高主频可达80MHz,具有浮点运算和32位处理能力,能够满足对监测时产生的大量的数据的处理;支持串行调试接口JTAG并内置256KB片内闪存,便于对监测程序的开发和调试;支持多种通信协议,包括CAN、USART、I C和SPI通信,符合控制板与上位机及各个传感器之间的通信要求。
通信模块的设计。控制板与激光测距仪的通信采用232总线,由于MCU提供的信号电平和RS232的标准不一样,因此需要电平转换芯片,本设计采用MAX232,它是MAXIM公司专门为RS-232标准串口设计的单电源电平转换芯片,集成度高,符合所有的RS-232C技术标准。控制板与上位机的通信采用CAN总线,CAN总线具有传输距离远、可挂载节点多、实时性高等特点,CAN收发器采用TAJ1050,它是一种标准的高速CAN收发器,可以为总线提供差动发送性能,为CAN控制器提供差动接收性能。由于MCU正常工作电压为3.3V,所以需要一个转换芯片,本设计采用两个74LVC245分别实现收发信号电平的转换,74HC245是一种三态输出、八路信号收发器,可实现3.3V和5V电压的转换。同时,为了得到的信号清晰、无抖动,这里增加了一个74HC14芯片。通信模块电路图如图4所示。
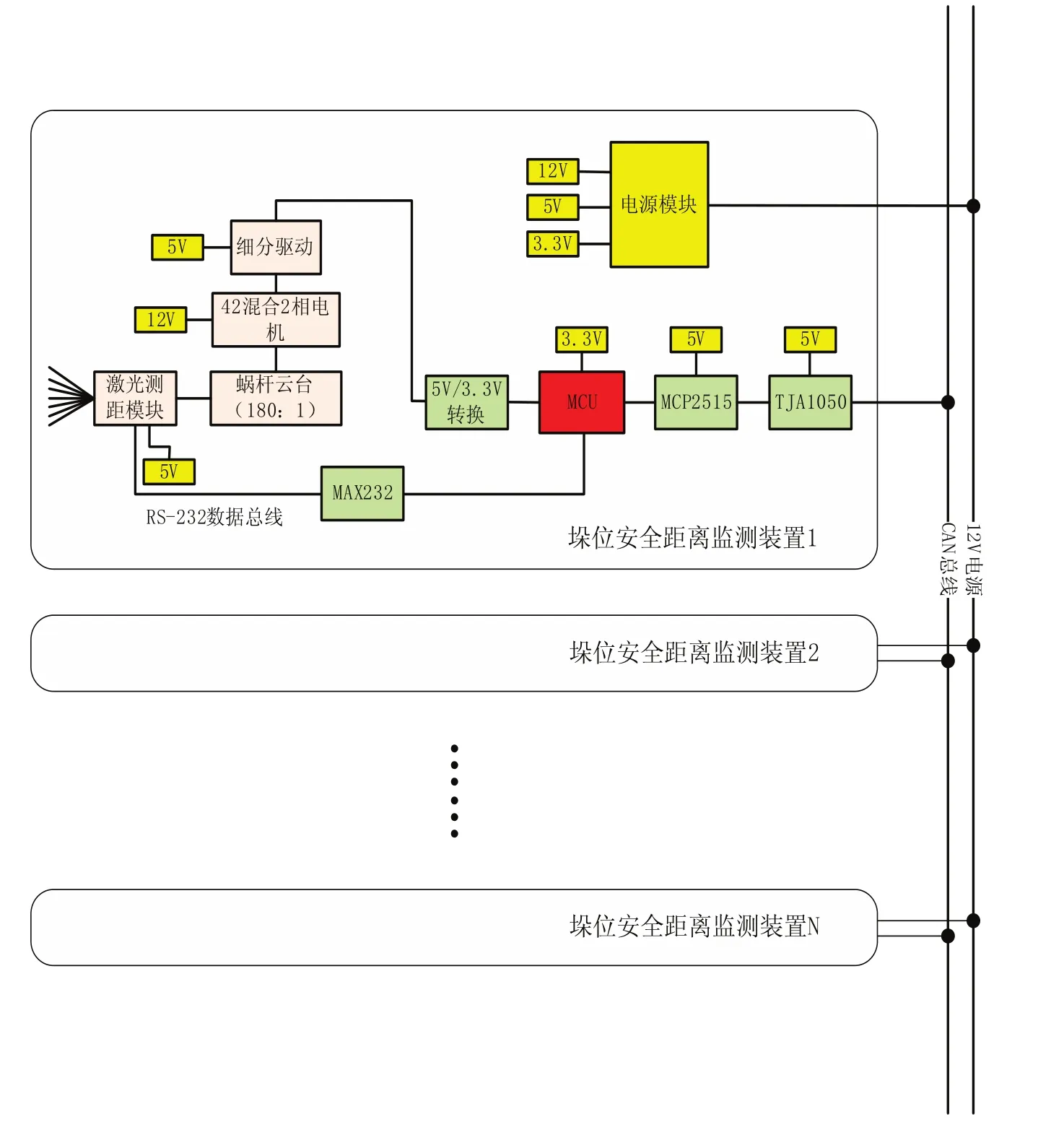
图2 安全距离监测装置架构图
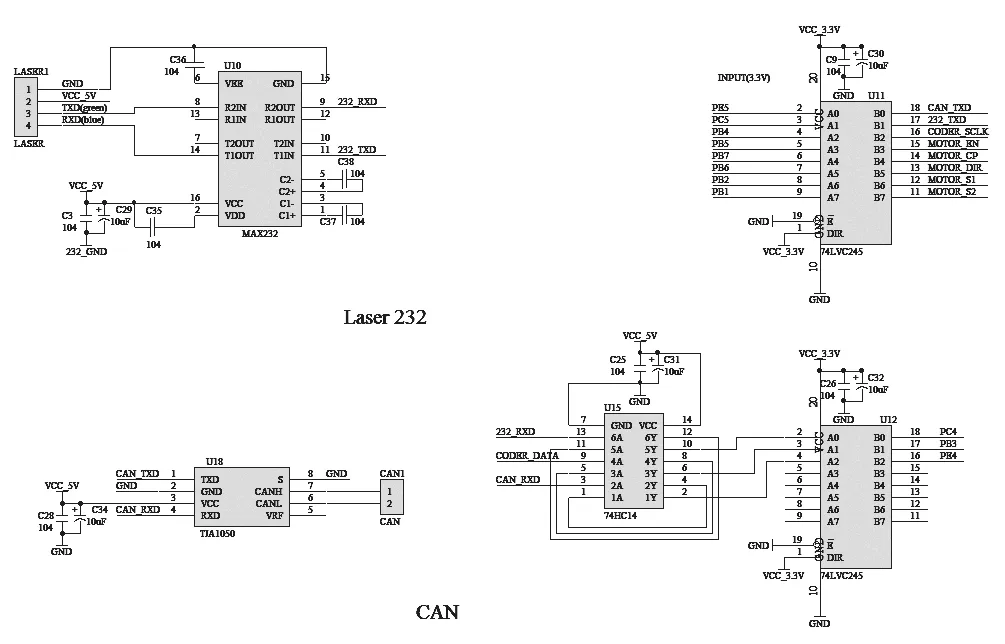
图4 通信模块电路图
为了防止掉电丢失数据,这里设计了一个电可擦可编程只读存储模块,选用Atmel公司生产的AT24C1024芯片,它采用CMOS 工艺,工作电压在1.8~5.5V之间,128KB,具有体积小、功耗低、容量大、二总线协议、占用I/O口线少读写操作相对简单等特点。EEPROM模块电路图如图6所示。
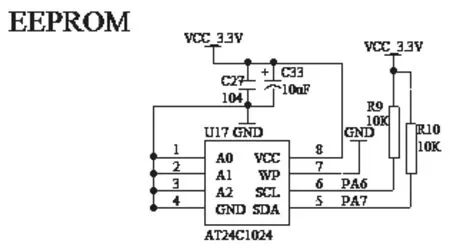
图6 EEPROM模块电路图
3.2 步进电机驱动器的选型
步进电机驱动器根据控制板发送来的脉冲信号转换为角位移,控制步进电机的运动,它的性能直接影响到步进电机的误差大小和运行是否平稳,进而影响到扫描测距的误差。因此步进电机驱动器的选型主要考虑扫误差和步进电机的平稳性两个因素。根据危化品仓库现场情况,需要将扫描测距的误差在三十米距离时控制在5~10厘米。
这里选用型号为THB7128的步进电机驱动器,它具有低功耗,多种细分,高细分(最高128细分),电机运行稳定,无噪音,不失步等特点,采用两片6N137高速光耦隔离输入,保护控制器同时是使步进电机工作更稳定准确。
误差因素: 在三十米的距离位置,云台的最大步距角为:

式中:S为危化品仓库的最大长度,设为30m;e为在三十米位置扫描测距的误差,设为5cm;
步进电机选用的是步距角为1.8°的步进电机,步进电机和云台之间有一台减速比180:1的蜗杆减速装置,则驱动器的最小细分倍数:

分析可知,扫描测距对步进电机驱动器的细分倍数要求不高,选择步进电机驱动器的选型主要考虑电机运行的平稳性,在调试过程中发现,采用128细分时,电机运行平稳,这里选用THB7128的步进电机驱动器,它符合对误差和平稳性的要求。
3.3 其它设备的选型
激光测距传感器选用型号为FTM-50A的传感器,它具有测程大、精度高、工业数据接口丰富、抗干扰能力强等特点,可适用于危化品仓库中的恶劣环境。
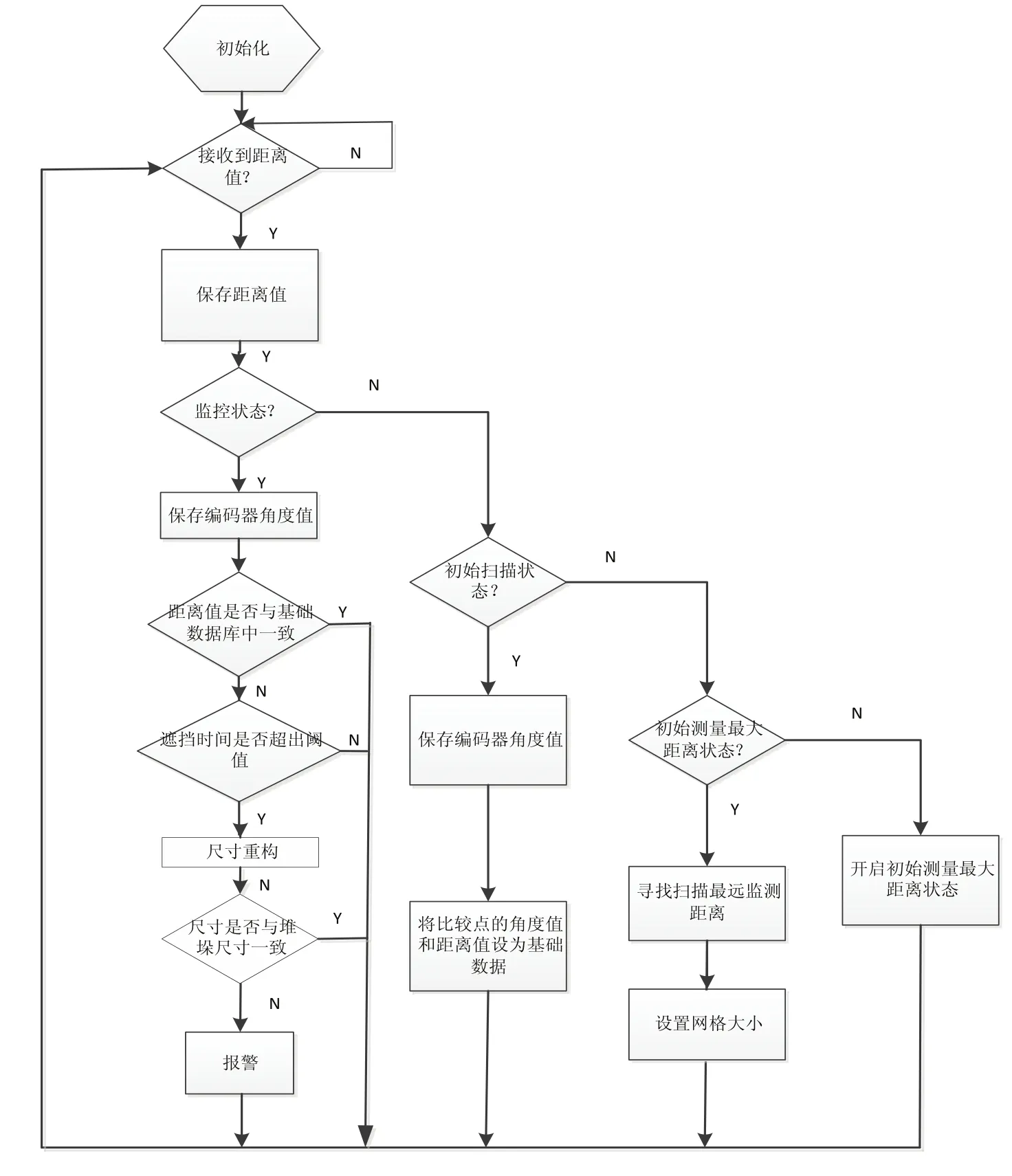
图7 主程序框图
云台选用蜗杆减速电动旋转台,型号为LY110DX,这种云台可以同时加装电机和编码器,并且装有180:1的蜗杆减速装置,在增强步进电机扭矩的同时,还提高了步进电机的精度。
编码器选用型号为JSP3806-S01的绝对值14位光电编码器,该编码器分辨率位360o/16384=0.02o,能够准确获得角度,并满足控制要要求。零位固定不受断电影响,抗干扰能力强,性能稳定可靠。
3.4 软件程序的设计
系统采用TI公司的Code Composer Studio5.5.0作为编程软件。它包含适用于每个TI器件系列的编译器、源码编辑器、项目构建环境、调试器、描述器、仿真器以及多种其它功能,为软件的编写提供了高效开发环境。
安全距离监测程序流程图如图7所示。系统初始化后,若接收到距离值则保存,并判断监测装置的状态,若处于监控状态,则保存得到的距离值和角度值,将距离值与数据库中相同角度的距离值比较,若不一致,则进一步判断测距仪受遮挡的时间是否超出阈值,若超出,则根据得到的距离值的角度值重构障碍物的尺寸,若尺寸与堆垛的尺寸不一致,则报警;若处于初始扫描状态,则保存角度值,并将接收到的距离值和对应的角度值作为基础数据库;若处于初始测量最大距离状态,则将得到的距离值进行比较找出最大值作为最远监测距离,根据最远监测距离设置网格的大小;否则进入初始测量最大距离状态。
3.5 精准定位测距控制算法
步进电机停位是否准确,关系到距离值和角度值是否准确,进而影响到对安全间距监测的准确性。对步进电机的控制,这里采用闭环PID控制算法,PID控制算法是最经典的一种控制方法,其控制简单,参数易调整,控制效果良好,被广泛应用于工业控制的各个领域。
PID控制算法又分为增量式控制算法和位置式控制算法,增量式控制算法与位置式控制算法相比,计算量小,适合步进电机的驱动。这里采用增量式PID控制算法。
增量式PID的表达式为:

式中: uk表示第k次输出的增量,ek表示第k次采样时刻输入的偏差值,ek-1表示第k-1次采样时刻输出的偏差值,ek-2表示第k-2次采样时刻输出的偏差值,Kp为比例系数,KI为积分系数,KD为微分系数。
步进电机采用位置单闭环控制,如图8所示。编码器检测并反馈云台转过的角度,于目标位置比较求出偏差量,传递给PID控制器, PID控制器经过计算后控制步进电机的运动。

图8 位置单闭环控制
4 实验验证
在实验室环境设置整齐排列的四个虚拟垛位,在三十米距离安装一台扫描监测装置,对两个处于同一监测面的堆垛扫描监测,系统上电后,扫描监测装置在第一个扫描周期内对监测面扫描,此时描监测装置处于寻找最远监测距离状态。进入第二个扫描周期,每转动一定角度,步进电机停顿一下较正位置,此时,扫描监测装置处于初始扫描状态。从第三个扫描周期开始,扫描监测装置周期性来回扫描,此时处于正常监测状态。在正常监测状态,令堆垛的监测面中某一处倾斜,验证系统能否正确得到该点的距离值,并与基础数据库中的数据比较产生报警。
经验证,本系统在三十米距离位置扫描监测误差在2-3厘米,能够在堆垛安全距离产生变化时系统产生报警,对危化品仓库堆垛安全距离进行监测。
5 结束语
本文完成了基于ARM的危化品仓库堆垛安全距离的监测的硬件设计和软件设计与开发。经实验测试,该系统运行稳定,可以对堆垛的安全距离进行有效的监测,达到了预期的目的,为危化品仓库堆垛安全距离的监管提供了一种实时高效的手段。
[1] 王辰勇.危险化学品安全存储研究[J].消防科学与技术,2013,32(9):1053-1053.
[2] 王兵.浅谈危险化验学品仓储企业安全管理[J].中国石油和化工标准与量,2014(9):203-212.
[3] 何军玲.视频监控技术的发展与应用探讨[J].电子技术与软件工程,2014(18):188.
[4] 骆云志,刘治红.视频监控技术发展综述[J].兵工自动化,2009,28(1):1-4.
[5] 曹世华.室内定位技术和系统的研究进展[J].计算机系统应用:2013,(22):1-5.
[6] 孙宇阳. 基于单幅图像的三维重建技术综述[J].北方工业大学学报:2011,23(1):9-12.
[7] 陈念,李进,王海晖.双目立体视觉测量系统的研究与实现[J].武汉工程大学学报:2011,33(5): 103-104.
[8] Shinohara, T, Expression of individual woven yarn of textile fabric based on segmentation of three dimensional CT image by using yarn position and orientation[J]. SICE Annual Conference (SICE), 2011.
