飞机自动喷涂碰撞防护方法
2016-03-02刘晨,张波,贾沛
刘 晨,张 波,贾 沛
(1.中航工业沈阳飞机工业(集团)有限公司;2.北京机械工业自动化研究所,)
0 引言
为实现飞机的自动喷涂,在国家重大专项资金的资助下,本课题研制了尾翼自动喷涂装备[1],用于飞机尾翼,包括平尾和垂尾外表面的喷涂。
装备是在现有人工喷涂厂房内改造完成,根据需要在整机状态下进行喷涂。飞机采用牵引车牵引就位后不再进行调整。为了保证飞机定位的一致性。在地面施画了轮胎引导线和前轮停止线,以便每次飞机停放在大致相同的位置。但由于飞机体型的巨大,微小的偏差都会带来机翼末端位置的严重偏差。同时由于每台飞机的状态均不相同,包括航油重量、发动机是否安装、轮胎气压等都会对飞机的姿态造成影响。
上述偏差都会对喷涂效果产生重大影响,甚至造成飞机与喷涂装备发生碰撞。因此必须采取措施解决。
本文介绍喷涂装备的结构和工作方式,以及由此带来的安全性问题。并提出针对此类问题的解决方案。
1 装备描述
1.1 喷涂系统
喷涂系统包括6自由度喷涂机器人、3自由度变位机、带双喷枪的延长杆,以及相关的输供漆、控制等系统。
3自由度变位机实现机器人沿飞机宽度方向(X轴)、沿飞机前后方向(Y轴)和垂直方向(Z轴)的运动。其作用是扩大机器人可达范围,满足飞机水平尾翼和垂直尾翼空间分布距离远,表面形状复杂的喷涂需求。机器人安放在Z轴平台上。
机械系统如图1所示。

图1 飞机尾翼自动喷涂系统
延长杆加装在机器人手腕部,延长杆末端安装扇面相互垂直的两把喷枪,以增加编程便利性。喷枪安装方式如图2所示。
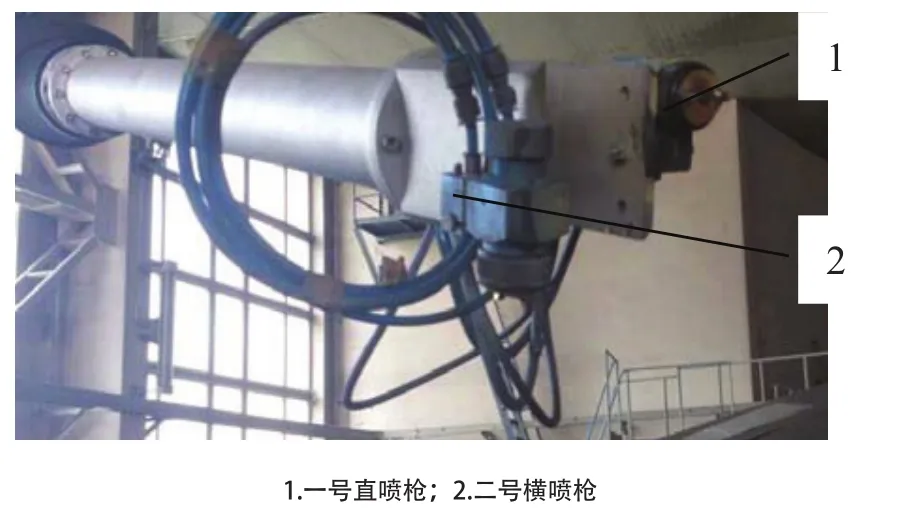
图2 双喷枪系统
1.2 位置检测系统
为解决引言中提出是飞机定位问题,目前采用的方法有两种,一种是应用调整装置调整飞机位姿,使飞机与喷涂装备处于相对固定的位置。F-35整机喷涂即采用移动台车(Paint Cell Dolly)进行飞机水平和高度的调整[2];另一种方法是测量飞机的位姿[3],调整喷涂装备来适应偏差。课题采用的是第二种方式。
课题采用激光跟踪仪作为检测仪器,在机器人示教过程中确定模型飞机与喷涂装备之间的位置关系,设定飞机坐标系与机器人坐标系重合,在飞机坐标系下进行编程。该方法在课题研制的进气道喷涂系统中得到成功应用[4]。
2 工作方式
本课题采用的补偿方式为:飞机定位后首先检测实际飞机坐标系与示教飞机坐标系,即机器人坐标系之间的关系,确定飞机偏移量,由机器人更改末端位姿来完成偏移量补偿。而3自由度外部轴仍然运动到原来设定位置。
由图1中喷涂照片可以看出,虽然增加了变位机和延长杆,喷涂时装备与飞机的距离仍然很近,特别是使用二号喷枪时。如直接进行喷涂作业,可能会出现机器人和变位机与飞机碰撞的危险。因此需要在正式喷涂前手动低速模拟喷涂过程,检验偏移补偿的有效性和喷涂作业的安全性。
即便如此,由于人工操作存在不确定性,在进行模拟操作时仍有发生碰撞的可能性,因此需要在技术上采取措施。
3 解决方案
从根本上解决问题的方法是在机器人和变位机上安装传感器,在装备与飞机碰撞前报警。目前通用机器人尚未集成碰撞检测传感器。一方面原因是机器人属于多自由度机构,工作范围大,很难预测哪些部位会发生碰撞;同时工业机器人技术目前发展非常成熟,公开报道的机器人事故通常发生在示教或者检测、检修时,安装传感器的必要性不大。
特殊应用场合,如AGV等,采用加装传感器的方式进行距离检测,常用的传感器有非接触式测距和接触式两类。非接触式测距通常采用激光、超声波、红外等测距,接触式传感器则多利用机械触碰微动开关原理。
在喷涂环境下,由于漆雾中含有复杂金属成分,激光和超声波等传感器无法正常工作,而一些接触式传感器普遍无法在爆炸环境应用。同时在装备进行喷涂时,为防止漆雾落在机器人上,需要为机器人穿上防护罩,这也影响到传感器的正常工作。
综上所属,在喷涂作业中很难进行飞机与装备之间的位置检测,比较可行的办法是在模拟过程中进行检测。
4 传感器应用
本课题采用了工业无线网络进行组网,用激光传感器进行测距。实现了测量数据的非接触采集、集中处理和无线传输三种功能。
无线网络模块采用了美国邦纳的无线模块,模块主要包括DX80网关、DX80节点、FlexPower和DX81 FlexPower 电池模块。模块组成和系统框图如图3、4所示。其中测距传感器与节点联接,与节点、电源模块共同组成移动单元,设备通过磁性安装附件安装在机械臂和变位机上。网关通过网线与主控PLC联接。

图3 无线模块组成
移动测量模块在进行模拟喷涂时安装,喷涂时移除。
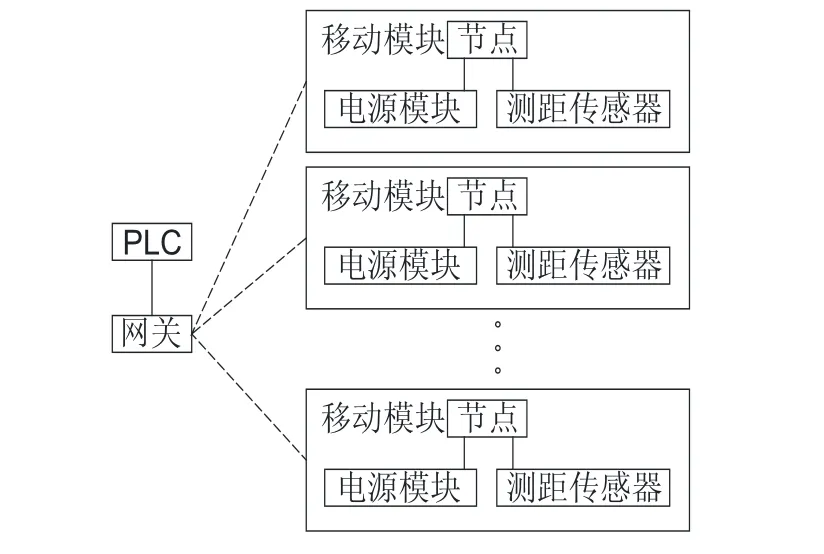
图4 系统框图
采用无线网络的优点是:
1)喷涂时可方便的移除移动模块,不影响喷涂系统正常工作。
2)不需要额外的布线,方便操作,也降低了安装及调试成本。
3)可灵活布置传感器位置,以适应飞机位置偏差。
5 结论
通过安装无线测量网络,可以极大的避免喷涂装备与飞机方式碰撞的危险性,在目前的技术条件下不失为一种可行的办法。
[1] 赵宏剑,王刚,张波,等.飞机尾翼自动喷涂系统,制造业自动化,第35卷,第1期(下),pp153-156.
[2] Seegmiller N A. Precision robotic coating application and thickness control optimization for F-35 final finishes[J].SAE Journal, 2010 (3).
[3] 石闻.F-22 战斗机的机器人表面喷涂,航空工程与维修,1997年08,pp22,38.
[4] 王崇,张波,赵宏剑,季旭东.激光跟踪仪在飞机喷涂中的应用,制造业自动化,第35卷,第9期(下),pp78-79.
