基于转子磁场定向的永磁同步电动机矢量控制系统对比分析
2016-01-22王飞宇赵朝会田井呈卓克琼
王飞宇, 赵朝会, 田井呈, 卓克琼
(上海电机学院 电气学院, 上海 201306)
基于转子磁场定向的永磁同步电动机矢量控制系统对比分析
王飞宇,赵朝会,田井呈,卓克琼
(上海电机学院 电气学院, 上海 201306)
摘要:介绍了基于转子磁场定向的永磁同步电动机(PMSM)矢量控制系统的原理,依据Clark变换、Park变换、空间矢量调制(SVPWM)和磁场定向控制等理论,借助Matlab/Simulink搭建了PMSM矢量控制仿真系统,研究了比例-积分-微分(PID)、积分分离式PID和比例-积分(PI)3种控制方式下PMSM矢量控制系统的启动性能、抗干扰性能和调速性能。仿真结果表明: 采用积分分离式PID控制方式较传统PID和PI控制方式的PMSM矢量控制系统具有更好的启动特性、动态响应、调速性能和转矩性能。
关键词:永磁同步电动机; 矢量控制; 积分分离式PID控制
收稿日期:2015 - 09 - 09
基金项目:上海市教育委员会科研创新项目资助(13ZZ142)
作者简介:王飞宇(1990-),男,硕士生,主要研究方向为电机驱动和控制,E-mail: wangfeiyu0202@163.com
通信作者:赵朝会(1963-),男,教授,博士,主要研究方向为电力电子及电力传动,E-mail: zhaoch@sdju.edu.cn
文章编号2095 - 0020(2015)05 -0260 - 07
中图分类号:TM 351; TM 341
文献标志码:A
Abstract:This paper introduces the principle of permanent magnet synchronous motor (PMSM) vector control system using field oriented control system based on rotor. According to the principle of Clarke and Park transformation, space vector pulse width modulation(SVPWM), and the theory of field oriented control, the paper builds a control simulation system of PMSM with Matlab/Simulink. Starting anti-jamming and speed control performance of PMSM vector control system are studied using three difference control styles: PID, integral separated PID, and PI. Simulation results show that a PMSM vector control system using integral separated PID has good startup characteristic, fast dynamic response, wide speed range and good torque performances as compared with PID and PI.
Comparative Study of Permanent Magnet Synchronous MotorControl System Based on Rotor Field Oriented Control
WANGFeiyu,ZHAOChaohui,TIANJingcheng,ZHUOKeqiong
(School of Electrical Engineering, Shanghai Dianji University, Shanghai 201306, China)
Key words: permanent magnet synchronous motor(PMSM); vector control system; integral separated PID control
永磁同步电动机(Permanent Magnet Synchronous Motor, PMSM)具有高效率、高功率密度、损耗小和结构简单等优点。伴随着数字交流伺服控制芯片的发展,PMSM矢量控制系统越来越多地被用于高动态性能、高精度的场合[1-2]。PMSM矢量控制系统通过Clark和Park正交坐标变换,将电动机电流分解成两个独立的直轴分量和交轴分量,实现了电流两个分量的解耦[3-4];这样,PMSM可以对定子电流的幅值、频率和相位进行灵活地调节和控制,进而通过调节直轴和交轴分量电流分别控制电动机的磁通和转矩,具有与控制直流电动机同样的效果[5],转矩分量与励磁分量的解耦使得PMSM矢量控制系统成为高性能的驱动系统。
在矢量控制系统中,电流的直轴和交轴分量经控制器调节输出电压信号。电压信号使空间矢量脉冲调制(Space Vector Pulse Width Modulation, SVPWM)[6-8]模块发出脉冲,逆变器通过脉冲指令来获得合适的电压矢量和作用时间,并在指定的时间达到需求值,完成对转矩分量和励磁分量的有效控制[9]。
在PMSM矢量控制系统中,电流环[10-11]和转速环[11]解耦所需的调节器往往选择使用比例-积分(PI)控制器。PI控制器具有简易性、鲁棒性和操作简单等优点。但是,在一些控制精度较高的场合,传统固定增益的PI调节器已不能满足需求,因此,研究人员对其进行了改进。文献[12]中采用一种变参数PI控制器,在一定程度上改善了控制精度。另外,在许多场合电动机需要面对频繁启动、突加负载和转速突变等工况;这些工况带来的输入信号偏差会使积分作用产生很大的负面效果,产生较大的超调、引起振荡和稳定性降低等,PMSM需要具备应对这些工况的能力。文献[13]中分析了一种抗积分饱和比例-积分-微分(PID)控制器,限定了输入误差信号偏差的最大幅值,避免了控制量长时间地停留在饱和区。文献[14]中分析了积分分离式PID控制器,当输入偏差超过一定值时,取消积分作用,避免了由于积分作用产生的超调;当偏差较小时,引入积分作用,以取消静差。另外,有研究人员将PID控制与智能控制算法结合[15],取得了不错的效果。
本文对基于转子磁场定向的PMSM矢量控制系统进行了理论分析与研究,对矢量控制系统中电流环电流的解耦给出了分析,扩展了电流环和速度环PID控制器,对比分析了PID、PI和积分分离式PID控制3种控制方式,并通过MATLAB/Simulink对矢量控制系统建模和仿真验证。
1PMSM的数学模型及矢量控制原理
PMSM是多变量耦合的系统。为更好地分析PMSM,本文做如下假设: ① 气隙磁场与感应电动势均为正弦分布;② 磁路不饱和;③ 转子无阻尼绕组;④ 永磁体磁动势恒定。
1.1 PMSM数学模型
PMSM矢量控制是建立在等效坐标变换理论基础上的控制方法,其在三相坐标系中的数学模型经过Clark、Park变换后可得到在dq坐标系的数学模型,其中,电压方程为
(1)
式中,ud、uq、id、iq分别为d、q轴电压和电流;Rs为定子绕组电阻;Ld、Lq为定子d、q轴等效电感;ωr为转子角速度;ψd、ψq为d、q轴等效磁链分量。
磁链方程为
(2)
式中,ψf为永磁体的励磁磁链。
电磁转矩方程为
Te=np(ψdiq-ψqid)
(3)
式中,Te为电磁转矩;np为极对数。
运动方程为
(4)
式中,TL为负载转矩;J为转动惯量。
1.2 矢量控制原理
PMSM矢量控制可以理解为对电磁转矩和磁阻转矩的控制,也就是对d、q轴电流的控制。依据对d、q轴电流控制方法的不同,有不同的控制方式,其中主要的矢量控制方式有id=0控制、恒转矩控制、最大转矩电流比控制、弱磁控制等[6]。
本文采用id=0控制。该控制方式使电流矢量全部位于q轴(即d轴分量为零),定子电流全部产生转矩,这样,就可以通过单一地控制q轴电流分量来控制电磁转矩,获得与控制直流电动机相同的作用效果。由于id=0,转矩方程可简化为
(5)
可见,反馈电流经变换后得到iq,其与设定电流值id经过调制可获得电压信号uα和uβ;然后根据uα和uβ的大小和方向合成需求电压矢量u,此时需要空间矢量脉冲调制(Space Vector Pulse Width Modulation, SVPWM)与逆变器的配合来合成控制电动机所需的电压矢量。
SVPWM技术在PMSM矢量控制系统中起着至关重要的作用。SVPWM将逆变器系统与交流电动机视为一个整体,以产生圆形旋转磁场作为控制逆变器动作的目的;其控制方式是通过交替使用几个不同的电压空间矢量来实现对磁链的跟踪。
SVPWM脉冲形成有以下4个步骤:
(1) 判断空间矢量电压所在的扇区;
(2) 计算晶体管导通的时间t1、t2,公用值X、Y、Z;
(3) 确定空间矢量的切换配合时间;
(4) 与三角载波比较生产6路PWM波形。
1.3 矢量控制系统框图
PMSM矢量控制系统框图如图1所示。

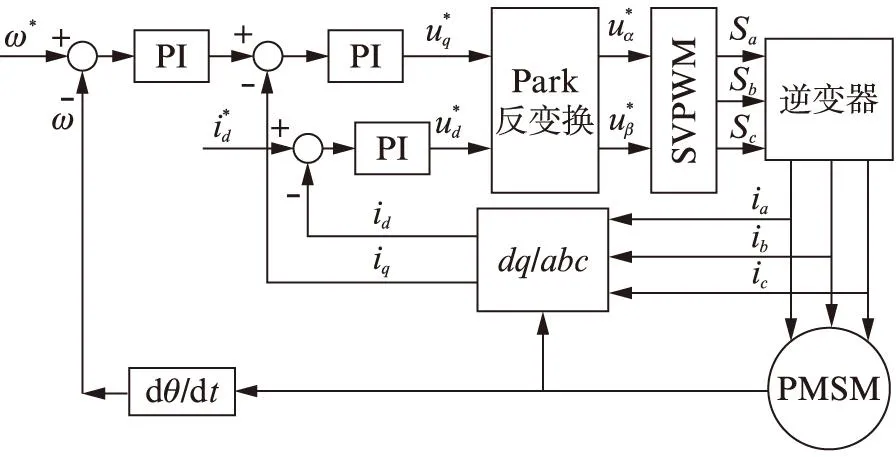
图1 永磁同步电动机磁场定向控制框图Fig.1 Diagram of field oriented control system for PMSM
23种PID控制方式分析
在PMSM矢量控制系统中,PID调节器常用于耦合量之间的解耦控制[4]。同步旋转的dq坐标系的激磁电流分量与转矩电流分量之间存在耦合,由式(1)、(2)设计得到电流解耦控制框图如图2所示。
图中,电流调节器Cd(s)和Cq(s)常采用PID控制器。PID控制器具有控制简单、易于操作和成本低等优点,是生产过程中最普遍采用的控制方法,技术也最为成熟,在机电、冶金和机械自动化的控制系统中都有广泛应用[14]。PID是将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制。
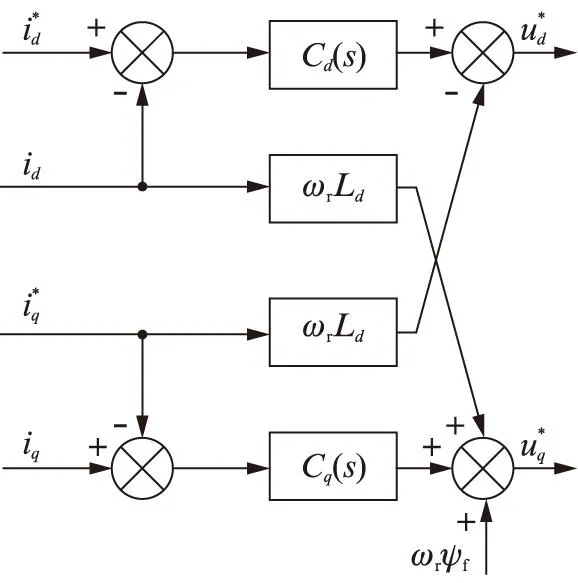
图2 电流解耦的控制框图Fig.2 Diagram of the current decoupling control
2.1 传统PID控制与PI控制
在一些控制精度要求不太高的控制系统中,常使用PI控制器就能满足需求。PI控制框图如图3所示。
在控制精度要求较高的矢量控制系统中,如电动机矢量控制系统是一个多变量输入、输出的非线性系统,其中电感参数的非线性会导致解耦项的偏差。由于解耦项为前馈量,其偏差的大小会影响电流的跟随特性,故往往需要增加微分(D)作用,以加速对偏差信号变化趋势的跟随速度,并在偏差信号变得过大之前,在系统中引入一个有效的早期修正信号,这样既可加快系统的动态响应,又可有效节约调节的时间。PID控制框图如图4所示。

图3 PI控制框图Fig.3 Configuration of PI
PID的控制规律为

图4 PID控制框图Fig.4 Configuration of PID
(6)
式中,kP、kI、kD分别为比例、积分、微分系数;e(t)为输入偏差。kP和kI的大小可根据电动机参数,如电动机的直轴电感Ld、交轴电感Lq和电枢电阻Rs来确定。
2.2 积分分离式PID控制
积分分离式PID控制的思路是当偏差较大时,取消积分,以避免因积分的作用使得系统的稳定性降低的情况发生;而当误差较小时,引入积分,取消净差,以提高系统的控制精度。选择积分分离式PID来替代传统的PID控制器,可以减少因矢量控制系统的非线性引起的较大偏差信号所导致的波形大幅波动。在设计积分分离式PID控制器时,对输入的信号进行离散化处理,不仅可减少非线性参数对电流跟随的影响,而且由于积分的分离作用,当偏差较大时取消积分,还可避免因积分饱和产生的超调量;而当偏差接近给定值时,加入积分,可产生调节作用,系统又可得到较好的稳定性。
积分分离式PID可作如下数学描述:

kD[e(k)-e(k-1)]/T
(7)
式中,T为采样时间;ξ为积分相的开环系数;
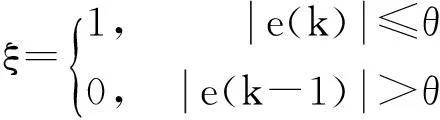
(8)

积分分离式PID控制框图如图5所示。
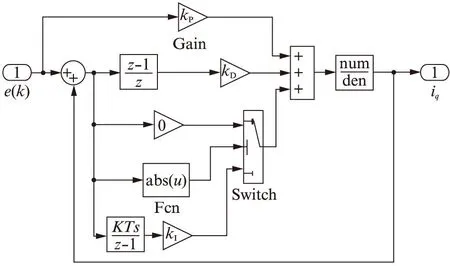
图5 积分分离式PID控制框图Fig.5 Configuration of integral separated PID
3仿真分析
本文研究的PMSM矢量控制系统的仿真实验是建立在假设的理想化条件下,与实际情况有差别,但仿真有效地反映了矢量控制系统的性能趋势,可作为实际开发过程中有价值的参考量。图6给出了PMSM矢量控制系统仿真框图。图中包括电动机本体模块、Clark变换模块、Park变换模块、PID调节器模块、逆变器模块和SVPWM模块等。仿真分别采用PI、PID、积分分离式PID控制方式来验证PMSM矢量控制系统的特性。3种控制方式均采用双闭环调节,速度环均采用PI调节方式,具体参数如下:kP=0.32,kI=25;交轴电流环调节器参数kP=1.2,kI=28;直轴电流环调节器参数kP=9.8,kI=200;采用积分分离式PID和传统PID控制方式的微分调节参数kD=0.2,采用ode45算法,允许误差为0.001,仿真时间为0.2s。

图6 永磁同步电动机矢量控制系统仿真模型Fig.6 Simulation model of vector control system of PMSM
本文采用的电动机参数如下: 额定电压u=380V;额定功率P=7.5kW;额定转速n=1500r/min;nP=2;RS=2.875Ω;Ld=0.65μH,Lq=0.105μH;ψ1=0.175Wb;J=1.8g·m2。
3.1 电动机空载启动性能
图7给出了系统空载启动时,3种控制下Te、I和n的仿真曲线图。
由图7(a)可见,在积分分离式PID控制方式下,系统在t=10ms时转矩达到稳定;而传统PID控制方式下,系统在t=20ms时产生超调,当t=30ms时达到稳定;在PI控制方式下,系统在t=30ms时达到稳定且无超调量。因此,空载启动时,积分分离式PID控制方式下系统的转矩响应和恢复时间最快,传统的PID控制方式次之且有超调,PI控制方式下的响应较慢。由7(b)可见,启动电流在t=40ms后稳定为空载电流,且电流峰值在允许范围内满足矢量控制系统的要求。由图7(c)可见,在积分分离式PID控制方式下,系统在t=10ms内达到给定参考转速值,转速响应较快;在传统PID控制方式下,由于积分的作用,当t=20ms时系统产生超调,当t=40ms时达到给定参考转速值;而在PI控制方式下,当t=30ms时系统达到给定参考转速,无超调。由此可见,在积分分离式PID控制方式下系统的空载启动性能较好。
3.2 电动机负载启动和抗干扰能力
在3种控制方式下,系统在给定转速n*= 1500r/min,恒定负载TL=5N·m下启动;速度达到稳定后,当t=0.1s时突加负载转矩TL=10N·m 的扰动。3种控制方式下的Te、I和n的仿真曲线如图8所示。
由图8(a)可见,当t=10ms时,在传统PID控制方式下,系统转矩有些波动,在0.1s内系统带负载启动与系统空载启动的转矩变化趋势大致相同;当t=0.1s突加负载出现干扰时,Te未出现大的波动并迅速达到稳态。由图8(b)可见,负载电流经短时波动后,当t=10ms时I稳定在6A,突加负载后I迅速稳定在12A,无大的波动。由图8(c)可见,当系统突加负载时,3种方式控制方式下的n均有波动: 在积分分离式PID控制方式下,系统转速波动2.6%(转速最大值为1460r/min),
当t=0.13s时系统恢复额定转速;在传统的PID控制方式下,系统转速波动5.3%(转速最大值为 1420r/min),当t=0.15s时系统恢复额定转速;在PI控制方式下,系统转速波动6.6%(转速最大值为 1400r/min),当t=0.14s时系统恢复额定转速。由此可见,积分分离式PID控制方式较传统PID和PI控制方式的启动速度快,波动小,转速恢复快,抗干扰能力强。

图7 空载启动时,3种PID控制器控制下,转矩、转速、电流与时间的关系Fig.7 Curve of torque and speed and current without load with three different PID
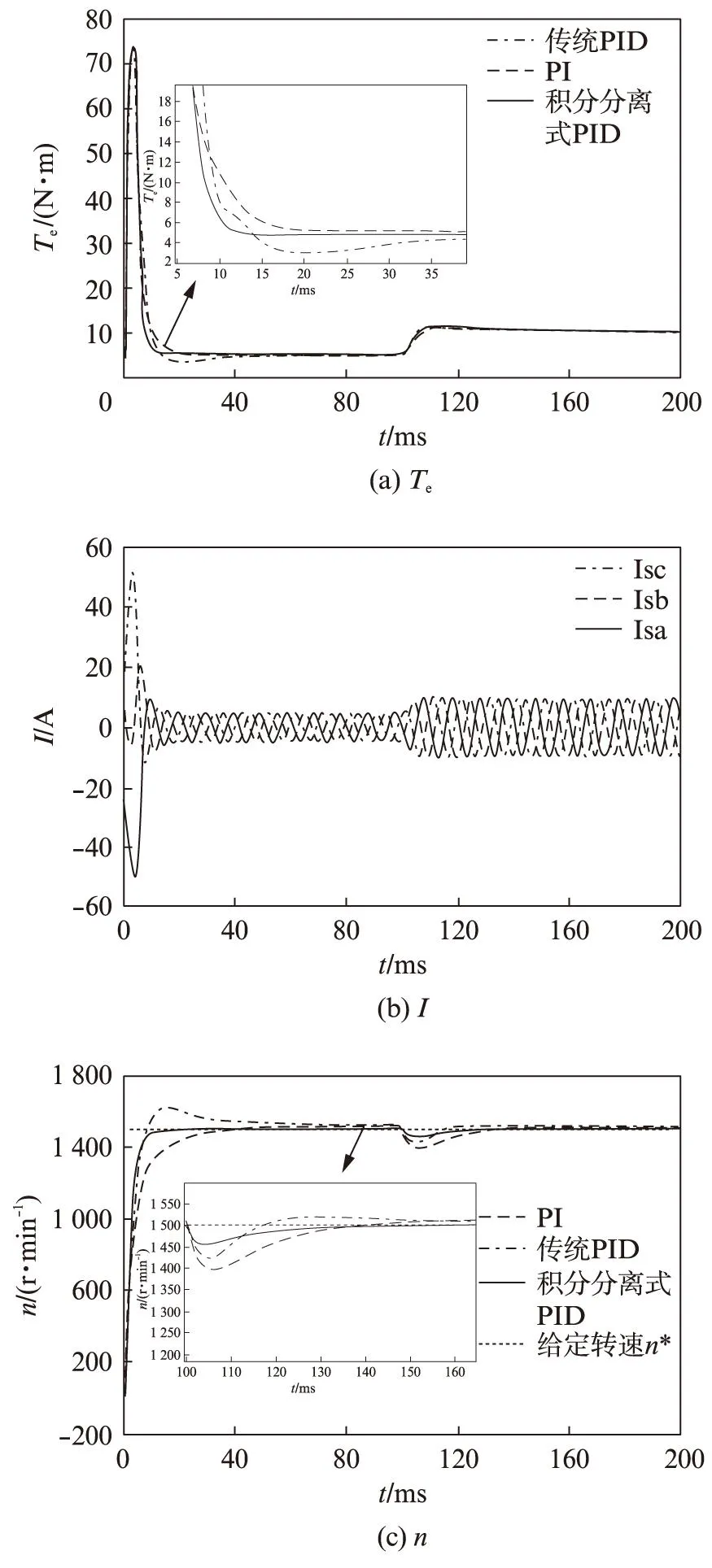
图8 3种PID控制器控制下转速、转矩和电流曲线Fig.8 Curve of speed and torque and current with three different PID
3.3 电动机调速性能
在3种控制方式下,当t=0.10s时,电动机转速由1500r/min突变为-500r/min,转速响应波形如图9所示。
由图(9)可见,当t=0.10s时,电动机转速突变为-500r/min,在积分分离式 PID控制方式下系统约在0.11s时到达给定参考转速,调速较快。在传统PID控制方式下,由于输入偏差增大导致积分饱和,当t=0.12s时系统产生了超调;在PI控制方式下,当t=0.15s时系统稳定为参考转速且无超调,调速稍慢。由此可见,3种控制方式中,采用积分分离式PID控制方式调速性能更优。
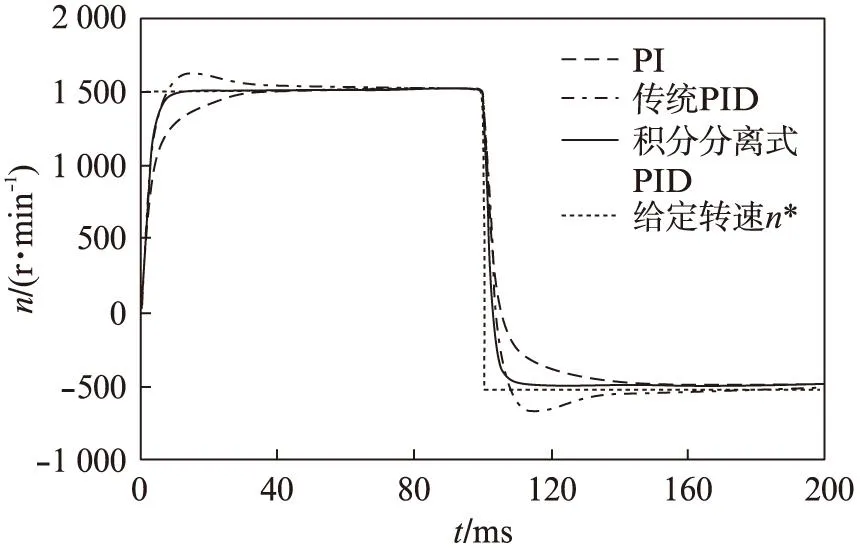
图9 3种PID控制器控制下转速突变时的转速响应Fig.9 Response of speed when the reference change suddenly with three different PID
4结论
本文对按转子磁场定向的永磁同步电机控制系统进行了理论分析和仿真,分析了3种PID控制方式对系统空载启动、突加负载和给定参考转速突变等状况下的仿真结果:
(1) 在启动速度上,与PI控制的矢量控制系统相比,在积分分离式PID和传统PID的控制方式下系统启动速度快;从产生的超调来看,采用积分分离式PID与PI控制的矢量控制系统无超调量,而传统PID控制有超调。总体而言,采用积分分离式PID较传统PID和PI的矢量控制系统启动性能好。
(2) 在抗干扰能力上,采用积分分离式PID较传统PID和PI控制的矢量控制系统转速波动小、转速恢复快,具有明显的优势。
(3) 在调速性能上,3种控制方式均能实现稳定调速,但采用PI控制方式响应速度稍慢,采用积分分离式PID控制方式有超调;就响应速度和超调量而言,积分分离式PID控制方式调速性能更优,可适用的范围广。
参考文献:
[1]王晓远,王晓光.盘式无铁心永磁同步电机矢量控制技术分析[J].中国电机工程学报,2014,34(18): 2952-2959.
[2]赵辉,鲁超,岳友军,等.基于三电平逆变器的永磁同步电机控制策略研究[J].电气自动化,2010,32(3): 1-3,44.
[3]刘贤兴,卜言柱,胡育文,等.基于精确线性化解耦的永磁同步电机空间矢量调制系统[J].中国电机工程学报,2007,27(30): 55-59.
[4]王恩德,黄声华.表贴式永磁同步电机伺服系统电流环设计[J].中国电机工程学报,2012,32(33): 82-88,179.
[5]杨圣蓉,王剑平,张果.基于SVPWM的异步电机矢量控制及调节器设计实现[J].电气自动化,2015,37(1): 17-20.
[6]程启明,王映斐,胡晓青,等.基于SVPWM的永磁同步电机矢量控制系统的建模与仿真[J].上海电力学院学报, 2012, 28(4): 329-335.
[7]Zhao Gang,Wu Fozhu.The simulation study based vector modulation method for PMSM control system[C]∥Tianjin Key laboratory for Control Theory & Applications in Complicated Systems.Tianjin,China: IEEE,2011: 217-219.
[8]陈娟,何英杰,王新宇,等.三电平空间矢量与载波调制策略统一理论的研究[J].中国电机工程学报,2013,33(9): 71-78.
[9]王伟华,肖曦.永磁同步电机高动态响应电流控制方法研究[J].中国电机工程学报,2013,33(21): 117-123,200.
[10]王萌,杨家强,张翔,等.一种表贴式永磁同步电机电流矢量闭环I/f控制方法[J].中国电机工程学报,2015,35(10): 2513-2521.
[11]Kamalaselvan A,Prakash S L.Modeling simulation and analysis of closed loop speed control of PMSM drive system[C]∥2014 International Conference on Circuit,Power and Computing Technologies[ICCPCT].Trichirappalli,India: IEEE,2014: 692-697.
[12]肖卫文,熊芝耀,李世耀,等.基于变参数PI的永磁同步电动机矢量控制系统[J].电力电子技术,2009,43(4): 32-33.
[13]杨立永,付严伟.抗积分饱和永磁同步电动机弱磁控制策略研究[J].冶金自动化,2012(S2): 185-188.
[14]韩明文,刘军.基于积分分离的永磁同步直线电机PID控制控制系统[J].电机与控制应用,2013,40(1): 22-24,34.
[15]陆华才,徐月同,杨伟民,等.永磁直线同步电机进给系统模糊PID控制[J].电工技术学报,2007,22(4): 59-63.

