基于变指数趋近律的无刷直流电动机滑模控制
2015-07-31范春丰迟冬祥
范春丰, 迟冬祥
(上海电机学院a.电气学院,b.电子信息学院,上海201306)
由于无刷直流电动机(Brushless DC Motor,BLDCM)具有恒定的机械转矩、良好的机械和调速特性,故其被广泛应用于航空航天、机器人等领域。但BLDCM系统的时变、非线性、强耦合特征[1-2]决定了其数学模型很难建立,无法获得准确的动力学参数,控制系统也更为复杂。
滑模变结构控制可以通过控制器结构的变化突破经典线性控制系统的限制,能快速跟踪系统参数的变化,在内外干扰下系统鲁棒性较好,且响应速度快、结构简单,是近年来的一个研究方向[3-4]。文献[5] 中将转矩观测器引入滑模控制中,减小了控制误差,抑制了外界干扰。文献[6] 中结合模糊控制与滑模控制,改善了系统的抖振。文献[7] 中提出了一种新型的积分自适应全局滑模控制器,削弱了系统的抖振。文献[8] 中在无位置传感器的BLDCM控制系统中应用了滑模控制,并验证了其性能。文献[9] 中将基于指数趋近律的滑模控制器引入转速调节器,降低了转矩脉动。由于指数趋近律存在高频抖振,影响了系统调速性能,本文提出将基于变指数趋近律的滑模控制应用于BLDCM控制系统,采用滑模控制器来控制BLDCM。系统运动轨迹在远离滑模面时,变指数趋近律以指数和变速两种速度趋向于滑模面,提高了趋近速度;接近滑模面时,指数趋近律速度趋向于零,改善了指数趋近律带来的高频抖振。
1 BLDCM数学模型
假定BLDCM工作于两两导通的星形三相六状态;忽略磁路饱和,不计涡流和磁滞损耗;永磁体无阻尼,忽略定子绕组电枢反应以及齿槽效应;气隙磁场分布是梯形波,平顶宽120°电角度;三相绕组对称,忽略绕组间互感。可得BLDCM电压平衡方程如下:

式中,u为定子相电压;R为相电阻;i为定子绕组相电流;ε为反电动势;L为定子电感。
电磁转矩方程为

式中,Te为电磁转矩;kT为转矩系数;ω为角速度;TL为负载转矩;J为转动惯量;δ为阻尼系数。
由式(2)可得BLDCM的电磁转矩与电流值成正比,通过控制逆变器电流的幅值可控制电动机的转矩。
反电动势方程为

式中,kε为反电动势系数。
将式(3)代入式(1),则

由式(2)~(4)可得BLCDM 动力学系统方程为

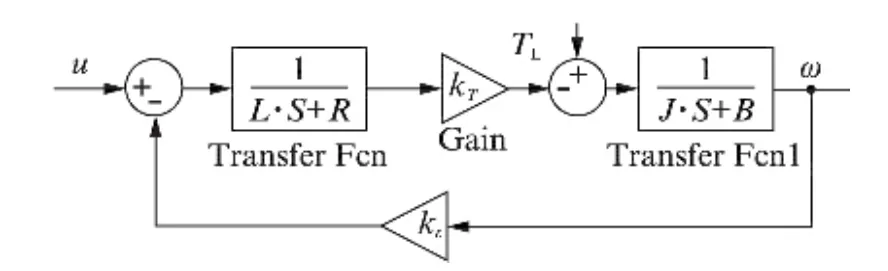
图1 无刷直流电动机动态模型Fig.1 Dynamic model of BLDCM
2 滑模控制器设计
滑模控制器主要设计步骤如下[10]:根据滑动模态渐进稳定性的要求,设计切换函数;根据滑动模态到达的条件,设计控制律;切换函数设计后,系统的动态响应在进入滑动模态后只与切换函数的参数有关,与扰动无关,从而实现扰动的抑制[11]。控制律的选取应使系统的运动范围稳定在切换面。
选取切换函数

式中,C=[c,1] 为系数矩阵,c为系数且c>0;x1、x2为状态向量。
对于系统(A,B),滑动模态在滑模切换面s=Cx=0上的动态响应只取决于C。
2.1 变指数趋近律
通常,系统引入滑模控制器时会在滑动模态下产生抖振,为了提高滑模控制器的控制效果,可在控制器中引入趋近律。滑模控制器中典型的趋近律有等速趋近律、指数趋近律等[12]。
指数趋近律为

式中,s为切换函数;为s的一阶导数;系数η为趋近切换面的速率,η>0;k为指数项系数,k>0。
由于指数趋近律的滑模切换面为带状领域,导致系统虽然在切换面上向原点运动,但无法稳定于原点,而是趋近于原点附近的一个高频抖振,此抖振可能激发系统中的高频成分[13]。
为改善指数趋近律的控制效果,本文对其进行改进,将状态量e引入指数项,从而获得新的变指数趋近律:

e在变指数趋近律下以变速和指数的速率趋向滑模面,在靠近滑模面时指数项趋近于零,其中,变速项sgn(s)起了主要作用。在滑模控制律的作用下,当系统在稳定中趋向零时,e进入滑模切换面并趋近原点,此过程不断减小控制律中的变速项sgn(s),使之最终到达原点。当到为达零原,达点到时消,产除生抖振抖的振目的的sg。n(s)项的系数
由李雅普诺夫稳定性定理可得,滑动模态的稳定性条件为

由式(9)、(10)可得:

又由于k>0,ε>0,故有ss·<0。
取李雅普诺夫函数

则

因此,可明显得到当<0,有,此时变指数趋近律滑模控制是稳定的。
2.2 控制律设计
令e=ω0-ω,其中,ω0为给定参考角速度,选取状态变量x1=e,x2=为e的一阶导数,则

将式(13)代入式(5),得BLDCM 的状态空间方程:

整理后,得

式中,

由式(6)、(8)、(14)、(15)可得控制律为

在滑模控制系统中,由于空间滞后和时间延迟等一系列原因,使得滑动模态存在高频抖振。这种抖振减弱了系统的精确性,并且增加了系统消耗,严重时会造成系统的不稳定[14-15]。为更好地降低抖振对系统的影响,本文采用准滑模动态控制原理,以饱和函数sat(s)替代sgn(s)函数来削弱抖振。

式中,Δ为边界层,其数值根据改善的抖振效果选取,本文中Δ=0.05。
3 仿真研究分析
为验证本文设计的变指数趋近律滑模控制器的有效性,使用Matlab对PID控制、常规指数趋近律和变指数趋近律滑模控制器下的BLDCM进行仿真实验。实验分突加负载扰动、参数两部分。实验中,取η=300,k=5。BLDCM参数如表1所示。

表1 BLDCM参数Tab.1 BLDCM parameters
(1)突加负载扰动。当t=30ms时加入0.25N·m负载扰动。图2给出了突加负载扰动时BLDCM的转速响应曲线和电磁转矩曲线。
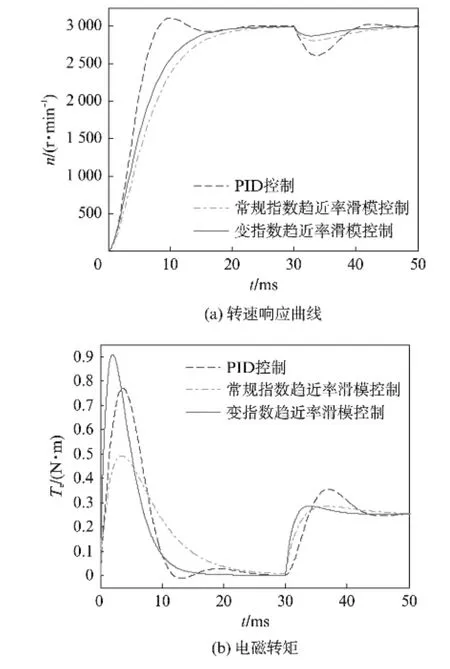
图2 突加负载扰动时的转速响度和电磁转矩曲线Fig.2 Speed respone curve and electromagnetic torque curve under load disturbance
由图2(a)可见,与滑模控制器相比,PID控制下的系统响应速度较慢,超调较大;在突加负载时,响应曲线下降幅度较大,且需较长的时间才能使转速稳定至原平衡状态;滑模控制下,则系统的转速响应速度较快,快速跟踪到达额定速度;同时变指数趋近律较常规指数趋近律能更快地达到转速稳定,且在抑制超调方面效果较好;在系统突加负载时能很快地做出响应,调节系统到稳定状态,抗负载扰动能力强。由图2(b)可知,在系统突加负载时,PID控制下系统的电磁转矩脉动较大;而在滑模控制下,转矩阶跃式地达到稳定状态,且未出现明显的转矩脉动,能有效地抑制转矩脉动,其中在变指数趋近律下,滑模控制较常规指数趋近律的调整速度更快,鲁棒性较好。
(2)参数扰动。取负载为TL=0.15N·m,当t=30ms时电阻值增加20%,图3给出了参数扰动下的转速响应曲线和电磁转矩曲线。

图3 参数扰动时的转速响应和电磁转矩曲线Fig.3 Speed respone curve and electromagnetic torque curve under parameter perturbation
如图可见,当参数扰动时,在PID控制下,系统的转速响应较慢,超调明显;变指数趋近律和常规指数趋近律控制下的滑模控制系统的抗干扰性较好。进一步分析可知,在两种趋近律下,系统负载时转矩均能在短时间内达到平稳,但变指数趋近律较常规指数趋近律转矩脉动抑制更强;当t=30ms突加负载扰动时,相对于常规指数趋近律,变指数趋近律滑模控制系统的转矩调整时间较短。
4 结 语
本文分析并建立了BLDCM数学模型,然后在指数趋近律基础上提出了变指数趋近律,并将基于变指数趋近律的滑模控制器应用于BLDCM
系统。仿真结果表明,与PID控制和常规指数趋近律相比,基于变指数趋近律的滑模控制系统具有响应速度快、无超调的优点,系统对负载扰动和参数扰动都有较好的鲁棒性,提高了控制系统的稳态性能。
[1] 瞿少成,王永骥.BLDC位置伺服系统的离散变结构控制[J] .中国电机工程学报.2004,24(6):96-99.
[2] 尹西杰,徐建国.无刷直流电机的神经滑模变结构控制[J] .计算机仿真,2014,31(8):402-406.
[3] 贾洪平,魏海峰.无刷直流电机滑模变结构电流控制[J] .微电机,2010,43(2):58-61.
[4] 胡云宝,王加祥,曹闹昌等.基于RBF神经网络无刷直流电机调速系统[J] .微电机,2013,46(1):63-66.
[5] 夏长亮,刘均华,俞卫,等.基于扩张状态观测器的永磁无刷直流电机滑模变结构控制[J] .中国电机工程学报,2006,26(20):139-143.
[6] Song Hailong,Yu Yong,Yang Ming,et al.A novel SMC-fuzzy speed controller for permanent magnet brushless DC motor[C] ∥Eighteenth Annual IEEE Applied Power Electronics Conference and Exposition.[S.L] :IEEE,2003:281-285.
[7] 刘慧博,李朝阳.BLDCM的积分自适应全局滑模控制[J] .计算机仿真,2014,31(7):366-369.
[8] Long Bo,Cao Binggang,Jiang Hui,et al.Position tracking controlling system of position sensorless BLDCM by using SMC[C] ∥Proceedings of the 2nd IEEE/AME International Conference on Mechatronic and Embedded Systems and Applications.Beijing:IEEE,2007:1-5.
[9] 张勇,程小华.指数趋近律滑模控制在BLDCM控制系统中的应用研究[J] .防爆电机.2013,48(6):21-24.
[10] 武俊峰,李月.滑模变结构方法在两轮自平衡机器人上的应用[J] .哈尔滨理工大学学报,2013,18(2):95-100.
[11] 李南海,何矞.基于指数趋近律的无刷直流电机滑模控制研究[J] .微电机,2013,46(3):72-76.
[12] 张丰.滑模变结构控制理论在非线性系统中的应用[D] .沈阳:沈阳理工大学,2013:25-27.
[13] 欧阳叙稳,尹华杰.基于变指数趋近律的永磁同步电机滑模控制研究[J] .微电机,2011,44(9):31-34.
[14] 高航,蒋东方,蒋晶.直流电动机的优化滑模变结构控制[J] .计算机仿真,2009,26(8),341-344.
[15] 李朝阳.高性能永磁无刷直流电机调速系统的研究[D] .包头:内蒙古科技大学,2014:24-25.
