基于自抗扰控制技术的无人机编队控制器设计
2015-12-28李一波胡杨陈伟王毅
李一波,胡杨,陈伟,王毅
(1.沈阳航空航天大学 自动化学院,辽宁 沈阳110136;2.中航工业成都飞机工业(集团)有限责任公司 技术中心,四川 成都610000)
0 引言
无人机编队飞行[1]是指两架或者多架无人机(UAV)为适应任务要求,以一定结构的某种队形排列飞行。与单架无人机相比,无人机编队可以显著提高完成作战任务的效率[2]。编队飞行主要包括队形设计、飞行过程中的队形保持,也包括根据外部情况以任务需要进行的队形动态调整变换。
无人机编队控制问题的研究主要集中在编队队形保持控制方面,国内外许多研究机构针对上述问题进行了广泛的研究。文献[3-4]采用了经典PID控制方法进行控制系统设计。文献[5]应用自抗扰控制策略设计了姿态角跟踪回路,验证了自抗扰控制器具有很强的鲁棒性。文献[6]考虑到编队时的气动耦合和外部干扰,设计了神经网络自适应逆控制器。文献[7]提出了一种利用高阶滑模控制的思想设计编队飞行保持控制器。以上文献提出的思想虽然解决了编队队形保持的问题,但在现实编队飞行过程中,系统容易受到外界干扰和航向测量误差等各种因素的影响,从而导致控制器的性能大大降低,难以满足实际应用时对编队指令控制精度和响应速度等方面的要求。
自抗扰控制(ADRC)技术最先是由我国韩京清研究员提出的一种非线性控制策略[8]。它一方面发扬了经典PID控制方法的不依赖于模型的精准性,仅基于误差反馈进行控制的优点;另一方面又结合了现代控制理论的成果,通过建立扩张状态观测器(ESO)对外界和内部的扰动进行实时估计和补偿,从而避免了积分作用的缺陷。本文基于长机-僚机结构,设计了自抗扰控制器,通过编队指令的输入可以完成编队过程的保持和变换。仿真结果表明,该控制方法控制精度高、超调量小、抗干扰性强,性能远优于现有的PID控制方法。
1 编队飞行相对运动数学模型的建立
以其中一架UAV和有人机斜线编队为例进行分析。采用固连于僚机的旋转参考坐标系(见图1),其x轴方向与无人机的速度矢量方向一致。

图1 编队飞行几何关系图Fig.1 Formation flight geometric relationship
因在同一高度下的水平面内,在不考虑高度方向的情况下,长机与其编队内的UAV的相对运动方程为:

式中:Vi(i=L,W)为长机和僚机的速度;ψi(i=L,W)为长机和僚机的航向角;ψE=ψL-ψW为航向角偏差。
编队飞行中每架UAV都安装有编队保持自驾仪,本文采用一阶惯性环节描述,如下式所示:


式中:τVi(i=L,W)和τψi(i=L,W)分别为速度时间常数和航向角时间常数。由于本文所研究的无人机模型机动性较差,在长机进行大角度机动转弯时,僚机无法跟随长机机动,所以应用小扰动和小角度假设,对其进行线性化处理得:

对式(3)~式(8)进行整理,可得编队飞行的数学模型为:

2 自抗扰编队控制器设计
2.1 自抗扰控制算法设计
ADRC是一种新型的控制算法,它对对象模型依赖程度较低,且对于系统中的不确定干扰具有较强的抑制作用,非常适合于UAV这种动态特性比较复杂的非线性系统[8-10]。因此,本文对作为僚机的UAV的速度和航向两个通道设计了由微分器(TD)、扩展状态观测器(ESO)、误差的非线性组合(NLSEF)和扰动估计补偿环节构成的ADRC控制器,如图2所示。

图2 自抗扰控制器结构图Fig.2 The structure of the ADRC controller
以航向角回路为例介绍ADRC控制器的设计。由于航向角ψ和角速率q是准积分关系,令x1=ψ,x2=ψ≈q,则航向角运动方程可写成如下形式:

自抗扰控制器的具体选择算法如下。
2.1.1 微分器

式中:r为快速因子;h0为滤波因子;h为积分步长。r参数的选取应满足使得跟踪微分器响应快和在给定阶跃信号时跟踪微分器输出曲线较为光滑两个条件。只要 h ≤ h0,即可消除震颤。fhan(x1,x2,r,h)的算法如下:

2.1.2 扩展状态观测器

式中:β01,β02和β03为增益系数,其整定原则是使扩张状态观测器能够很好地估计出系统各个状态的变化和扰动,β01,β02,β03应协同调整;δ为可调参数。fal(e,α,δ)的算法为:

2.1.3 误差的非线性组合

式中:α1,α2,α3及β1,β2,β3为可调参数;y为编队实际距离;yc为编队间隔指令。
2.1.4 扰动估计补偿为:

式中:b为可调参数,是唯一与控制对象有关的参数,其微小变化可能引起输出u的跃变,一般b取较大值可以有效补偿扰动和不确定因素。
在上述参数条件下,对ADRC控制器参数整定如下:r=0.2,h0=1,h=1,β01=0.8,β02=0.15,β03=0.5,δ=0.1,α1=0.8,α2=0.4,α3=0.8,β1=1.1,β2=0.1,β3=0.02,b=0.1。
2.2 编队控制系统仿真结构
用于模拟编队飞行控制系统仿真的控制结构如图3所示。

图3 编队控制系统结构Fig.3 Formation control system architecture
长机和僚机的自动驾驶仪完全独立,飞行时由长机的自动驾驶仪发出编队指令控制整个编队,僚机自动驾驶仪的控制指令来自编队控制器,编队间隔指令和编队控制律均在僚机模块中执行。本文通过控制各无人机之间的编队间隔来调整编队的队形,通过给各个僚机输入编队间隔指令(xc,yc),各僚机控制器即可自动调整本机在编队中的队形,完成相应的队形变换。
3 仿真结果及分析
UAV 一阶惯性模型参数:τψW= τψL=0.05,τVW= τψL=0.1。
假设编队时长机和僚机始终处于同一水平面内,航向角ψ0=0°,速度V=200 m/s,初始编队x=100 m,y=300 m。
通过输入编队间隔指令xc=250 m,yc=500 m,僚机的编队间隔响应如图4所示,可知僚机成功实现了编队的队形变换。
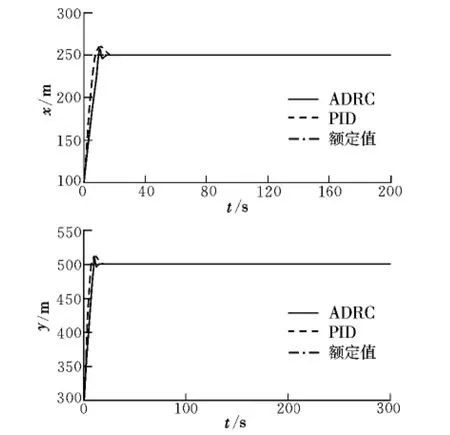
图4 编队队形变换响应曲线Fig.4 The response curve of formation transforming
在仿真20 s时给予长机30°的航向角,70 s时恢复航向,速度增加至450 m/s,僚机的速度跟踪和航向角跟踪如图5(a)和(b)所示,僚机x,y方向的编队间距响应如图5(c)和(d)所示,可知僚机成功实现了编队的队形保持。

图5 编队队形保持响应曲线Fig.5 The response curve of formation keeping
由仿真可知,传统PID和ADRC控制器都可以控制僚机准确跟踪长机机动,但ADRC控制器使得僚机机动响应超调量小,x,y方向编队调整时间较短,编队间隔最大偏差较小且无超调,过渡更加平稳,控制效果优于PID控制。
4 结束语
自抗扰控制器可以对系统的所有不确定因素作用都归结于“未知扰动”,并对它进行估计和补偿,且无需知道系统的精准模型以及具体参数[11],具有控制精度高、适应能力强等优点。本文所使用的方法扩充性也很好,可以通过对编队间距的控制来实现两架或者更多架无人机进行编队飞行时的队形保持与变换。在后续研究中,将深入研究各种不确定因素带来的干扰对所设计的ADRC编队控制器的影响,优化编队控制器的相关参数,提高编队控制技术的实用性。
[1] 李文皓,张珩.无人机编队飞行技术的研究现状与展望[J].飞行力学,2007,25(1):9-11.
[2] Hasan A M,Samsudin K,Ramli A R,et al.A review of navigation systems[J].Australian Journal of Basic and Applied Sciences,2009,3(2):943-959.
[3] 朱战霞,郑莉莉.无人机编队飞行控制器设计[J].飞行力学,2007,25(4):22-24.
[4] 刘成功,杨忠,樊琼剑.无人机编队队形保持变换控制器设计[J].计算机仿真,2011,28(10):73-77.
[5] 曹宇.无人机非线性自抗扰控制方法研究[D].哈尔滨:哈尔滨工业大学,2013.
[6] 王晓燕,王新民,姚从潮.无人机编队飞行神经网络自适应逆控制器设计[J].控制与决策,2013,28(6):837-843.
[7] Galzi D,Shtessel Y.Closed-coupled formation flight control using Quasi-continuous high-order sliding-mode[C]//American Control Conference.New York,2007:1799-1804.
[8] 刘刚,王彪.PID/ADRC控制器在四旋翼无人飞行控制中的应用[J].云南民族大学学报:自然科学版,2014,23(2):151-156.
[9] HU Q,FEI Q,WU Q,et al.Research and application of nonlinear control techniques for quadrotor UAV[C]//第三十一届中国控制会议.合肥:中国科学技术大学,2012:706-710.
[10]杨瑞光,孙明玮,陈增强.飞行器自抗扰姿态控制优化与仿真研究[J].系统仿真学报,2010,22(11):2689-2693.
[11] 韩京清.自抗扰控制技术[J].前沿科学,2007,1(1):24-31.
