短距起飞垂直降落飞行器飞行品质研究
2015-12-28陈坤史志伟陈永亮
陈坤,史志伟,陈永亮
(南京航空航天大学 航空宇航学院,江苏 南京210016)
0 引言
短距起飞垂直降落(STOVL)飞行器与常规飞机的主要区别在于:它不仅可以如同常规飞机一样飞行,而且能够进行空中悬停、垂直着陆、加减速过渡、侧移和短距/垂直起飞等。这些特殊的性能,使STOVL飞行器在狭小的场地或恶劣的气候条件下比常规飞机具有更强的生存能力,是下一代飞行器的发展方向之一。推力矢量技术是实现STOVL的最佳手段[1-3]。目前,带推力矢量的STOVL飞行器主要有:英国的“鹞”式,美国海军陆战队的AV-8A和AV-8B,美国最新研制的F-35B,原苏联和西德分别研制过的雅克-38、雅克-141和VAK-191B垂直/短距起落飞机[4-8]。
在过渡和悬停阶段,STOVL飞行器拥有特殊的飞行品质要求,是常规飞机所不具有的[9]。国际上现行的关于STOVL飞行器的飞行品质规范主要使用的是 AGARD 577[10]和 MIL-F-83300[11]。目前我国尚没有关于STOVL飞行器的飞行品质规范,相关研究资料也较少。本文在研究国外STOVL飞行器飞行品质规范的基础上,分析了在过渡和悬停状态下俯仰、滚转和偏航轴的控制效能、纵向与横向特征根,并给出了一些过渡或悬停状态下对STOVL飞行器的特殊要求。
1 过渡状态下的飞行品质要求
在过渡飞行状态下,AGARD 577和 MIL-F-83300对俯仰轴控制效能的定义如图1所示。图中:θ(1)表示当操纵位移(δ)在0.3 s达到最大值后,1 s时刻俯仰角的变化值;θ¨max表示初始时刻的最大俯仰角加速度。滚转轴和偏航轴也采取同样的定义方法。

图1 过渡状态下俯仰控制效能定义Fig.1 Definition of pitch control effectiveness in transition
表1~表3给出了过渡飞行状态下AGARD 577和MIL-F-83300对俯仰、滚转和偏航控制效能的具体要求。俯仰控制效能要求如表1所示,AGARD 577 给出了 θ(1)和 θ¨max的参考值,MIL-F-83300 则要求平尾用于配平后需留有50%以上的操纵裕度。

表1 过渡状态下俯仰控制效能要求Table 1 Requirements of pitch control effectiveness in transition
表2给出了滚转控制效能。可以看出,AGARD 577给出了对 φ(1)和的参考值,MIL-F-83300则以滚转30°所需要的时间tφ=30°作为准则,它们都要求横向操纵除了用于滚转控制以外要留有50%的操纵裕度,用于抑制方向舵偏转时产生的侧滑。

表2 过渡状态下滚转控制效能要求Table 2 Requirements of roll control effectiveness in transition

表3 过渡状态下偏航控制效能要求Table 3 Requirements of yaw control effectiveness in transition
表4给出了在过渡状态下进场时,对飞行航迹控制效能的要求。要求过渡过程中具有稳定爬升和下降能力,要求飞行器在以某一推力状态下进场时,在不改变构型的情况下,通过改变发动机推力,能够实现平飞或比进场航迹角低4°的飞行,从而能够实现航迹跟踪。

表4 过渡状态下飞行航迹控制效能要求Table 4 Requirements of flight path effectiveness in transition
以XV-15为例,图2给出了STOVL飞行器的过渡飞行包线。如过渡包线越狭窄,则过渡过程中对推力矢量偏转角的要求越严格,操纵越不容易。AGARD 577要求在整个过渡包线内能够连续加速或减速,加减速能力要能达到0.5g,MIL-F-83300则要求能够快速地从任何配平点进行加速或减速,它们都要求过渡过程中航向应较容易保持。

图2 STOVL飞行器过渡飞行包线Fig.2 STOVL aircraft flight envelope in transition
图3 和图4给出了过渡飞行条件下对纵向和横向特征根的要求,分为仪表飞行和目视飞行,对纵向振荡根的要求转化成固有频率阻尼比形式。图中的黑色三角代表AV-8A的特征根,这些特征根都是在没有施加控制增稳系统下得到的。由于AV-8A在过渡状态下纵向特征根达不到2级飞行品质,因此并未显示在图中,可见过渡飞行时其纵向是不稳定的。AV-8A横向滚转和螺旋模态都是稳定的,荷兰滚模态稍微发散。在没有控制增稳条件下,AV-8A在过渡状态下是难以操纵的。

图3 过渡状态下纵向振荡根要求Fig.3 Requirements for longitudinal oscillation roots in transition
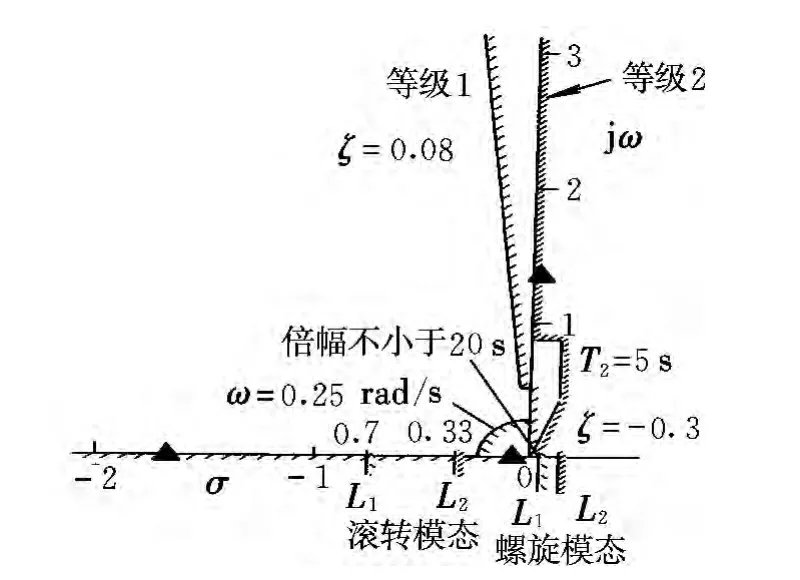
图4 过渡状态下横侧向振荡根要求Fig.4 Requirements of lateral oscillation roots in transition
2 悬停状态下的飞行品质要求
表5~表7给出了在悬停状态下对俯仰、滚转和偏航控制效能的要求。对于俯仰控制效能,AGARD 577 给出了对 θ(1)和的参考值,而MIL-F-83300只给出了对θ(1)的要求;对于滚转控制效能,AGARD 577给出了对φ(1)和的要求,而MIL-F-83300只给出了对φ(1)的要求;对于偏航控制效能,AGARD 577 给出了对和偏航 15°需要的时间tψ=15°的要求,而MIL-F-83300只给出了对ψ(1)的要求。

表5 悬停状态下俯仰控制效能要求Table 5 Requirements of pitch control effectiveness in hovering

表6 悬停状态下滚转控制效能要求Table 6 Requirements of roll control effectiveness in hovering

表7 悬停状态下偏航控制效能要求Table 7 Requirements of pitch control effectiveness in hovering
主要考虑推重比和垂向阻尼之间的关系,表8给出了对于垂向控制效能要求。由于悬停状态下飞行器本体垂向阻尼较小,按1级飞行品质要求推重比要达到1.1,可以通过控制增稳系统改善垂向阻尼,减少对推重比的要求。

表8 悬停状态下垂向运动控制效能要求Table 8 Requirements of vertical motion effectiveness in hovering
图5给出了悬停状态下纵向和横向特征根的要求,分为仪表飞行和目视飞行。图中的黑色三角代表AV-8A的纵向特征根,可以看出,其部分特征根没有达到2级飞行品质。在没有控制增稳系统条件下,AV-8A在悬停状态下还是较难控制的。

图5 悬停状态下纵向和横向特征根要求Fig.5 Requirements for longitudinal and lateral characteristic roots in transition
3 STOVL无人飞行器减速过渡品质分析
STOVL无人飞行器发动机推力矢量主要包括两个前升力矢量喷管和一个主矢量喷管。两个前升力喷管和主喷管均可以由水平位置向下偏转98°,主要用于短距起飞、过渡和垂直降落所需要的推力矢量控制;另外还有一对前后俯仰姿态喷管、一对滚转姿态喷管和一对偏航姿态喷管,用于垂直降落和过渡段辅助舵面进行姿态控制。STOVL无人飞行器的常规控制舵面包括升降舵、方向舵和副翼。
研究中分析该飞行器减速过渡阶段的部分品质,设定的减速过渡速度范围为250~60 km/h。当速度低于最小平飞速度(160 km/h)时,必须使用推力矢量才能维持按预设航迹的减速过渡飞行。
在减速过渡飞行阶段,发动机始终处于加力状态,发动机推力矢量最大偏转。首先分析减速过渡段在不同推力下所需的时间和飞行距离,以及减速过渡段迎角、升降舵偏角和纵向加速度在不同推力下随速度的变化,如图6和图7所示。

图6 不同油门下减速过渡所需时间和飞行距离Fig.6 Time and distance required for deceleration transition at different throttle settings
由图6计算结果可以看出,推力越小,减速时间越少,减速距离越短,但影响不大。

图7 减速过渡段迎角、升降舵偏角和纵向加速度在不同油门下随速度的变化Fig.7 Deceleration transition angle of attack,elevator and longitudinal acceleration at different throttles
由图7计算结果可以看出:在不同推力水平下,配平迎角、升降舵偏角以及减速性能的差别只有在低速下才比较明显,配平迎角越大,阻力越大,减速性能越好;升降舵直到临界速度前还具有一定的控制效能。
根据过渡状态飞行品质的要求,计算在整个过渡飞行包线内(250~60 km/h)的纵向和横向特征根,设置发动机油门大小为1.2。将纵向特征根转化为固有频率阻尼比形式,如图8所示,横侧向特征根如图9所示。
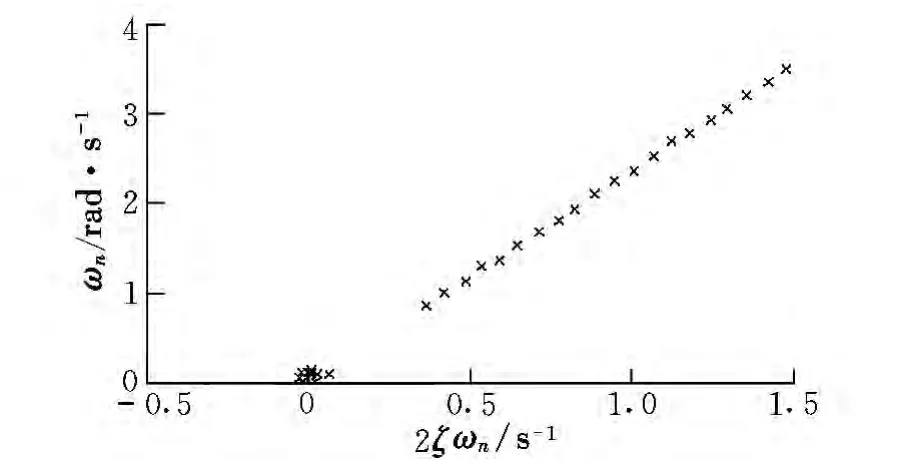
图8 纵向特征根固有频率阻尼比形式Fig.8 Natural frequency and damping ratio form of longitudinal characteristic roots

图9 横侧向特征根Fig.9 Lateral characteristic roots
将图8固有频率阻尼比计算值与图3过渡状态下对纵向特征根要求相比较,在过渡速度较大时,可以满足2级飞行品质,在过渡速度逐渐降低时,纵向特征根的飞行品质特性也逐渐变差。
将图9中横侧向特征根与图4过渡状态下对横侧向特征根要求相比较,滚转收敛模态在整个过渡过程中满足1级飞行品质,荷兰滚模态和螺旋模态在整个过渡过程中速度较高时满足1级飞行品质,当速度低于90 km/h时,仅满足2级飞行品质。
由上述的分析可知,随过渡速度的降低,特征根稳定性变差,飞行品质恶化。若要提高过渡过程中纵向和横向飞行品质,需施加控制增稳系统,改善纵向和横向的稳定特性。
下面分析在减速过渡过程中,升降舵和副翼的最大操纵效能。此时发动机油门设为1.2,发动机矢量喷管全部偏转到最大98°。图10给出了1 s时间俯仰角和滚转角的最大变化值,图11给出了俯仰角加速度和滚转角加速度的最大值。

图10 俯仰角速率和滚转角速率控制效能Fig.10 Pitch and roll angle control effectiveness

图11 俯仰角加速度和滚转角加速度控制效能Fig.11 Pitch and roll angle acceleration control effectiveness
与表1过渡状态下对俯仰控制效能的要求相比:当速度大于180 km/h时,满足AGARD 577对俯仰控制效能的要求;当速度逐渐减小,控制效能也变得越来越弱。与表2过渡状态下对滚转控制效能的要求相比,也有类似的结果。可见,在低速情况下,仅靠舵面的操纵,满足不了俯仰和滚转轴对控制效能的要求,需要姿态喷管协同控制。
4 结论
STOVL飞行器拥有一些特殊的飞行性能和品质规范,分析AGARD R-577和MIL-F-83300可知:
(1)和常规飞机相比,过渡包线等品质指标都是STOVL飞行器所特有的,过渡和悬停状态的控制效能要求和纵横向模态指标也与常规飞机有明显差别。
(2)通过分析某STOVL无人飞行器过渡性能,发现其在过渡速度较低阶段,品质特性逐渐变差,舵面效率变得不足,需要在气动设计和控制系统设计方面予以重视。
[1] Anon.V/STOL handling,I-criteria and discussion[R].AGARD R577-70,1970.
[2] Lacey T.MIL-F-83300:view from an aircraft designer proceedings[R].NAVY/NASA VSTOL Flying Qualities,1977.
[3] Anon.YAV-8B aerodynamic stability and control and flying qualities report[R].MDC-A4637,1980.
[4] Walker G P,Allen.X-35B STOVL flight control law and flying qualities[R].AIAA-2002-6018,2002.
[5] Anderson S B.History overview of VSTOL aircraft technology[R].NASA-TM81280,1981.
[6] Traskos R,Schweinfurth R,Anders G.USN/FMOD FRG VAK-191Bjoint flight test program[R].Aircraft Description and Flight Test,1976.
[7] Rickman SJ,Pesyna K M.The development of the JSF F-35 lift fan variable area vane box nozzle[R].AIAA-2002-6028,2002.
[8] Gustafson RA.Ten years of USmarine corps harrier operations[R].AGARD-CP-313,1980.
[9] Martinez,Francisco.Performance mapping of a thrust augmenting ejector in transition for short takeoff and vertical landing aircraft[J].Journal of Aircraft,2013,45(2):431-442.
[10] AGARD.V/STOL handing qualities criteria[S].NATO Science and Technology Organization,1970.
[11] Military Specification.MIL-F-83300 flying qualitiesof piloted V/STOL aircraft[S].USDepartment of Defense,1970.
