一种改进的Bursa模型在坐标转换中的应用
2015-12-28陈博黄翔李泷杲邢宏文
陈博,黄翔,李泷杲,邢宏文
(1. 南京航空航天大学 机电学院,江苏 南京 210016;2. 上海飞机制造有限公司航空制造技术研究所,上海 200000)
一种改进的Bursa模型在坐标转换中的应用
陈博1,黄翔1,李泷杲1,邢宏文2
(1. 南京航空航天大学 机电学院,江苏 南京 210016;2. 上海飞机制造有限公司航空制造技术研究所,上海 200000)
摘要:在数字化测量中经常面临坐标转换的问题,转换参数在很大程度上影响着最终测量精度。在采用bursa模型求取转换参数时一般是通过3个以上公共点利用最小二乘法求取,但其中的系数矩阵往往是病态的,使转换参数并不可靠。现采用7参数法,对布尔沙模型进行泰勒展开,建立了适用于大旋转角的线性化坐标系转换模型。
关键词:坐标转换;最小二乘;bursa模型;转换参数
目前数字化测量在我国飞机外形及零部件检测中应用越来越广,正逐步取代旧式的、利用模线样板等工艺装备检测方式。在获取零部件外形高精度数据后与设计数模进行分析对比,一方面为现有工艺下的外形品质提供可靠的数字化评价,另一方面通过大量检测结果的统计分析,可以找出影响飞机零部件品质的关键因素,进而建立检测结果和误差影响因素的统计图表,为工艺的设计与改进提供理论和实践参考,从而实现飞机零部件的制造品质持续提升[1]。
使用激光跟踪仪、激光雷达等数字化测量手段可以获取高精度的测量数据,但是当被测工件超出其测量范围时,测量仪器不确定度也随着测量距离的增加而增加,从而导致测量精度的下降。如Leica AT901 B激光跟踪仪的测量不确定度为±15 μm+6 μm/m,根据现场应用情况,测量长度一般应<10 m。为解决这一问题常采用的方法是使用多台测量设备建立统一空间计量网络USMN(unified spatial metrology network)。这样就会涉及2个空间直角坐标系的转换问题,目前最常用的空间直角坐标系的转换通常用含有7个转换参数的布尔沙模型,这样在转换计算转换参数的过程中,需要至少3个公共基准点。但是这一模型一般是只适用于2个坐标系小角度的坐标转换。但在实际使用中公共点位情况比较复杂,测量设备可能会以任意的姿态放置在地面上或工件上进行测量,所以2个坐标系之间的坐标轴之间的夹角一般不是微小角度。陈宇[2]等研究了基于7参数的非线性最小二乘法的坐标系转换算法,刘东明[3]等研究了13参数的大角度三维坐标系转换方法。现针对传统的统一空间计量网络有检测效率低、精度差的问题,采用激光雷达、激光跟踪仪等测量设备建立统一空间计量网络,利用泰勒展开将布尔沙模型线性化,建立了适用于大旋转角的线性坐标系转换模型,较好地平衡了测量效率与精度问题。
1激光雷达工作原理
激光雷达是一种大尺寸、非接触、高精度、自动化、便携式数字化测量设备。激光雷达拥有球形测量系统如图1所示,通过运用调频相干激光雷达测距技术和高精度反射镜利用红外激光光束测得被测点的距离d、俯仰角α、和方位角β从而转换得出被测点的三维坐标信息。被测点空间坐标计算公式为:

(1)

图1 极坐标测量
激光雷达测距原理: 激光器在发射一束经空气传播到测量点并且返回的外测信号的同时, 又发射一束在定长光纤中传播的内置信号如图2所示 。光纤的长度与固定测量距离S相对应, 即对应于激光在空气中传播2S的距离。假设测量点的距离为L, 那么激光在空气中传播的距离为2L, 返回的激光信号较在定长光纤中传播的激光信号有Δt的时间延迟,Δt的时间延迟产生了Δf的频率变化, 并且Δt与Δf成正比。在激光雷达中, 可以准确地测出频率变化Δf, 通过测量频率变化计算出时间延迟, 最终得出被测点与激光雷达的距离d。
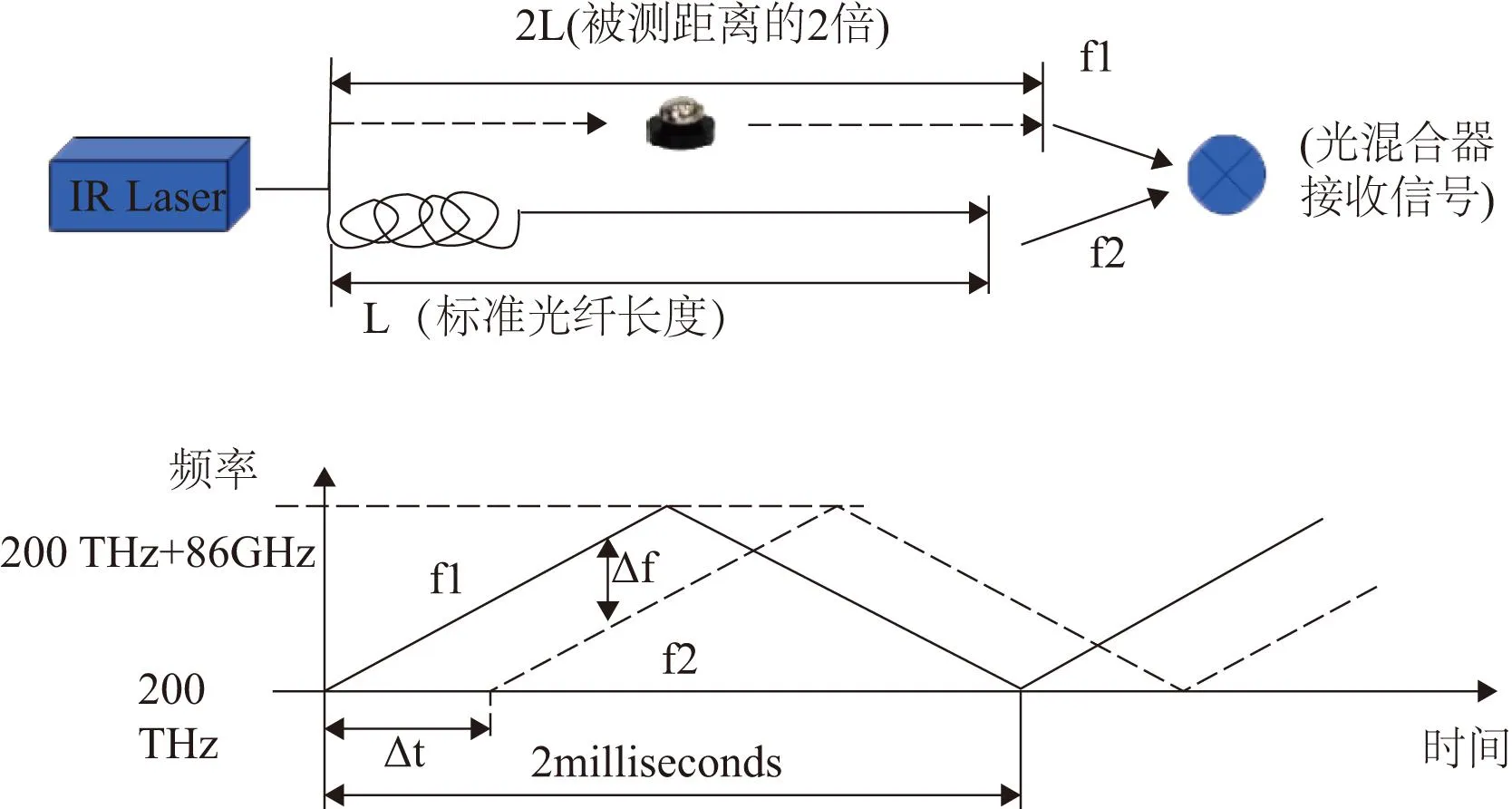
图2 激光雷达测距原理
2坐标转换参数计算方法

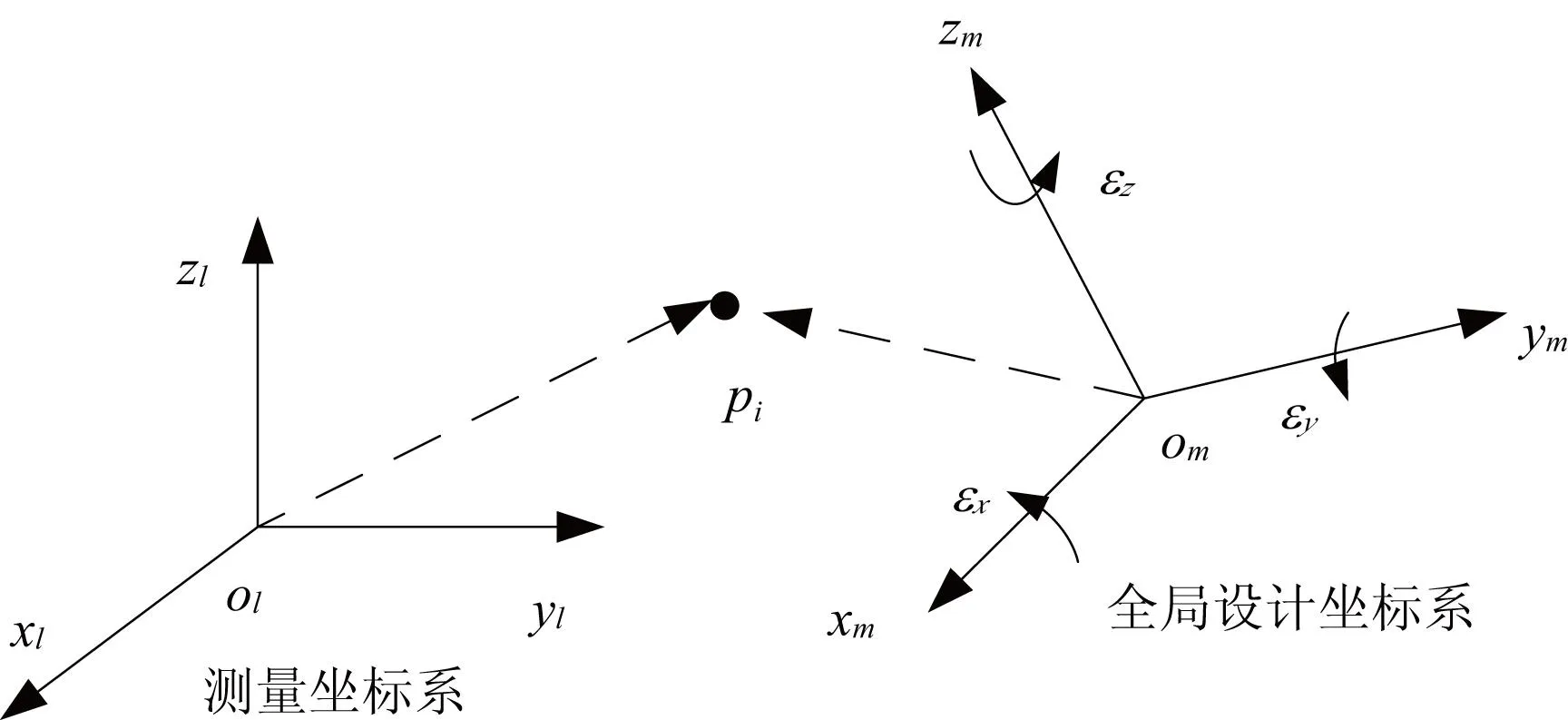
图3 测量坐标系与全局设计坐标系关系模型




为方便描述,当旋转角度为微小量时有:
⑫“Amaritudine”(苦涩),见 Cesare Ripa,Iconologia,Roma,1603,p12.
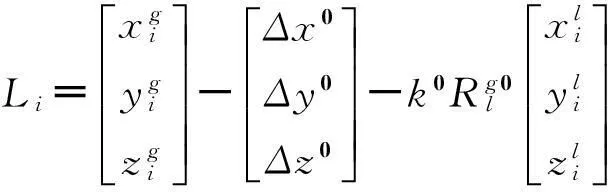
这种布尔沙模型对旋转参数的三角函数做了近似处理,忽略了其中互乘项并记sinε=ε,cosε=1,用这种近似模型得出的旋转参数只适用于旋转角是微小角度的情况。如果旋转角度不是微小角度时,使用这一模型将不能得出正确结果。而根据实际应用,测量仪器可能会以任意的姿态放置在地面或者安装在飞机零部件上进行测量,这就意味着测量坐标系与全局设计坐标系之间的坐标轴旋转角可能是任意角度。现将布尔沙模型进行展开,并忽略二阶及二阶以上无穷小项,得:
其中,上标为0的表示取近似值,d(Δx)、d(Δy)、d(Δz)、dk、dεx、dεy、dεz为参数的改正数。
上式可简化为:
Li=BiΔC

式中,ΔC为两坐标系转换参数的改正数,Li表示公共基准点Pi的拟合误差,设Bi为公共基准点Pi的坐标系转换系数矩阵。将式写成误差方程的形式:
Vi=BiΔC-Li
扩展至n维形式得:
V=BΔC-L
BTWV=0
联立式和式,解算得到坐标系转换参数的改正数:
ΔC=(BTWB)-1(BTWL)
由于各基准点可视为相同精度独立观测值,一般取观测权重矩阵为单位矩阵,即W=I。转换参数改正数的协因数矩阵Qxx和单位权中误差估值为
QΔCΔC=(BTWB)-1
利用此方法,只要已知3个或3个以上的公共基准点的测量坐标和全局设计坐标,再为转换参数选取合适的初值,加上每次求出的改正数,如此循环迭代,当改正数满足一定精度时,停止迭代,便可求解出坐标系转换参数。
3实例分析
为了验证坐标系转换精度,现对若干个测量点,进行坐标系转换算法验证试验。选择6个不共线的公共基准点,公共基准点的全局理论坐标和测量坐标如表1,表2所示。
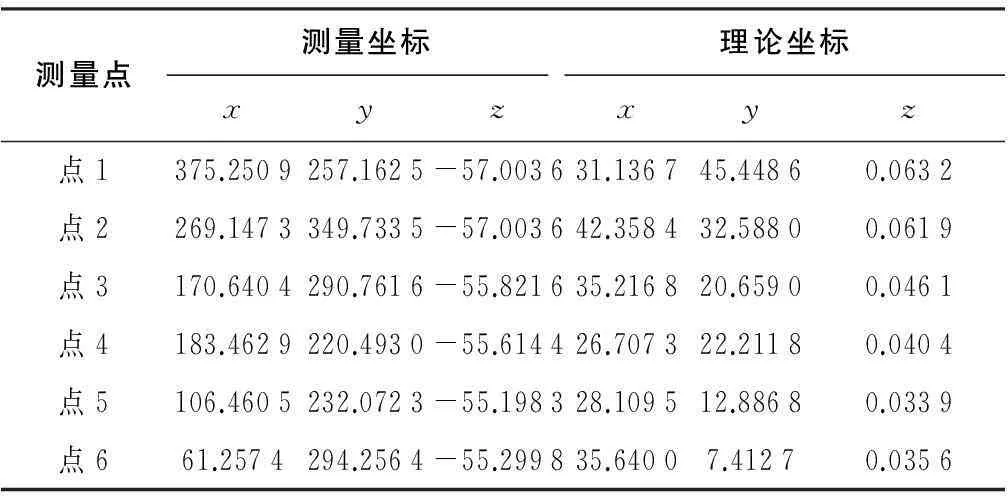
表1 理论坐标和测量坐标 单位:mm

表2 利用坐标系转换法,求解出转换参数
可计算得到公共基准点在全局设计坐标系中的计算坐标,比较测量点全局计算坐标与理论坐标的差,最终考察坐标系统一的计算精度如表3所示。
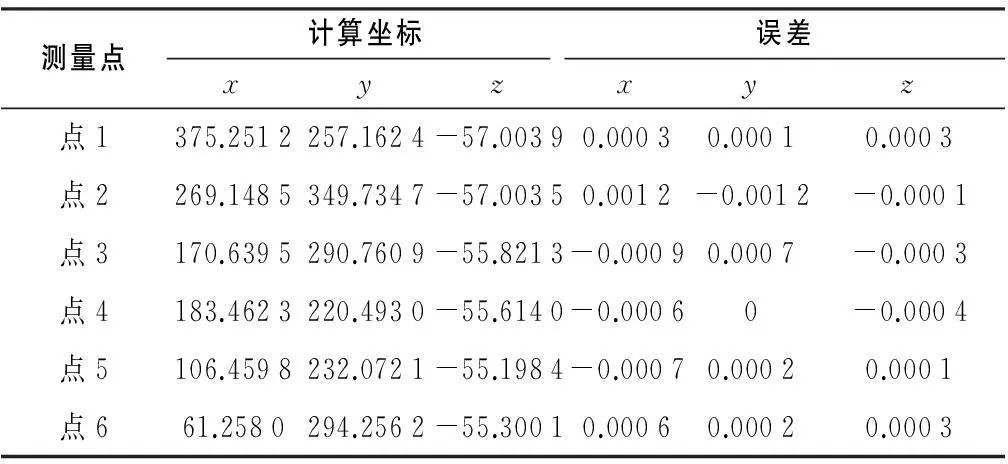
表3 计算精度表 单位:mm
实验结果表明,该算法相对于原有算法能在较少的迭代次数内快速收敛,并精确的求解出坐标系转换参数。该算法能行之有效的完成坐标系转换,并具有较高的转换精度,满足工程应用需求。
4结语
针对传统的bursa模型通过3个以上公共点利用最小二乘法求取转换参数时系数矩阵往往严重病态,一般只适用于小角度坐标系转换,当坐标系夹角不是微小角度时求得的转换参数并不可靠的问题,采用7参数法,对布尔沙模型进行泰勒展开,将布尔沙模型线性化,建立了适用于大旋转角的线性坐标系转换模型,较好地解决了平衡测量效率与精度问题。该方法具有数值计算精度高、计算稳定性好、收敛速度快等特点,适用于任意旋转角的坐标系转换,能够实现测量过程中的坐标系转换。
参考文献:
[1] 刘胜兰,罗志光,等. 飞机复杂装配部件三维数字化综合测量与评估方法研究[J]. 航空学报,2012,(33):1-10.
[2] 陈宇,白征东. 基于非线性最小二乘算法的空间坐标转换[J]. 大地测量与地球动力学, 2010,(02): 129-132.
[3] 刘东明, 郭际明, 施展, 等. 大角度三维基准转换及公共点的确定[J]. 测绘通报, 2010,(1): 11-14.
[4] Yadong Li, Peihua Gu. Free-form surface inspection techniques state of the art review [J]. Computer-Aided Design, 2004,(36).
[5] 李潇, 尹辉. 基于最小二乘配置的三维空间坐标转换[J]. 测绘工程, 2006, 17( 2): 16- 18.
[6] SUN Junhua. ZHANG Guangjun,WEI Zhenzhong,et al.Large 3D free surface measurement using a mobile coded light-based stereo vision[J]. System Sensors and Actuators A:Physical,2006,132(2):460-471.
[7] 刘大杰, 施一民, 过静珺. 全球定位系统(GPS)的原理与数据处理[M]. 上海:同济大学出版社.
[8] 陈正宇,刘春. 基于多参数正则化的空间坐标转换与精度分析[J]. 大地测量与地球动力学,2008,(2):1-28.
[9] Koch K R and Yang Yuanxi. Robust kalman filter for rank deficient observation model [J]. Journal of geodesy ,1998,72 (8):436-441.
Application of Improved Bursa Model in Coordinate Transformation
CHEN Bo1,HUANG Xiang1, LI Shuang-gao1,XING Hong-wen2
(1. Nanjing University of Aeronautics and Astronautics, Nanjing 210016,China; 2. Shanghai
Aircraft Manufacturing Co.,Ltd., Aeronautical Manufacturing Technology Research Institute, Shanghai 200000,China)
Abstract:In the digital measurement, the problem of coordinate transformation is often faced with. The transformated parameters may have direct influence on the measurement accuracy. These parameters can be obtained with least square at least three common points on Bursa model. Because of the ill-posed coefficient matrix, the obtained parameters are unreliable. By linearizing the model of Bursa-Wolf, Taylor is expanded and the linearized model of coordinate transformation is built, in order to be suitable for large rotation angle.
Keywords:coordinate transformation, least square, bursa model, transformation parameters
收稿日期:2014-11-27
中图分类号:V556.7
文献标志码:A
文章编号:1671-5276(2015)03-0087-03
作者简介:陈博(1989-),男,山东菏泽人,硕士,研究方向:数字化测量。