移动配载控制系统在航标船中的应用
2015-12-21史金山徐应年
史金山 徐应年
(1.武汉南华工业设备工程股份有限公司 武汉 430223; 2.武汉理工大学自动化学院 武汉 430063)
移动配载控制系统在航标船中的应用
史金山1徐应年2
(1.武汉南华工业设备工程股份有限公司武汉430223;2.武汉理工大学自动化学院武汉430063)
摘要在带有吊机的航标船上,当吊装货物时船体会倾斜,如不加以控制会导致船舶发生倾覆的严重事故。文中采用移动配载方式来解决此问题,通过控制配载重物在船体横向来回移动,用以平衡吊机工作时造成的船体倾斜,使船体保持基本平衡。采用PLC(programmable logic controller)作为主控制器,变频器驱动交流电机,电机带动齿轮齿条带动配载重物移动。在控制算法上,采用模糊控制算法,建立模糊控制规则并经实船调试的反复调整,最终在实船达到比较满意的控制效果。
关键词移动配载模糊控制PLC
在很多工程船舶甲板上通常设置有吊机用来吊装重的设备或货物,当吊机吊装重物吊臂旋转时会引起船舶的倾斜,倾角过大可能会导致船舶的倾覆,酿成重大事故。为了避免事故的发生,南京航标船配置了一套移动配载自动控制系统,该船长40 m,宽7 m,可根据吊机吊装重物时船体的倾斜方向和角度,实时改变船的配载,用以消除重物造成的船体倾斜。
1 工作原理
所谓移动配载,顾名思义就是根据船体倾斜角度的变化移动重物来改变船体的配载。具体实现为在船的宽度方向底舱设置由槽钢制作的轨道,一块重5 t的可移动配置铁块通过滚轮放置在轨道上,采用齿轮带动齿条的传动方式,当电机转动时,动力通过减速箱减速,带动齿轮旋转,齿轮带动齿条运动,齿条拉动配置铁块在导轨上运动。通过改变电机的旋转方向实现配载沿纵向中心线两侧方向运动,通过移动配重铁块的位置来抵消吊机工作时带来的船舶倾斜角度,使船舶始终处于相对平衡的状态。
6 结语
除了上面列举的故障模式和故障穿越分析和试验,为保障安全性,整个电网包含AGP还需要做一系列分析和实验来保证其功能得以实现和保持,如:软件仿真测试;出厂试验;海上认可测试;海上FMEA分析测试;其他测试如硬件在环(HIL)测试等;DP年度试验[4]。
在DP2作业时母排联络开关能闭合运行的船舶,能够根据负载选择在线发电机的台数并让它们工作在最优的状况,这样可以大幅提高燃油经济性,减少碳和其他有害气体排放。虽然对船舶设备和系统提出了更高的要求,但其带来的收益却是长久的。
参考文献
[1]李志垒.动力定位海洋工程船舶电力推进系统的设计[D].天津:天津大学,2013.
[2]刘杨.动力定位故障模式与影响分析[D].哈尔滨:哈尔滨工程大学,2011.
[3]李东辉.船舶柴油发电机组的建模与运行仿真研究[D].大连:大连海事大学,2011.
[4]ABS Rules.Guide for dynamic positioning systems[S].2012.
图1为移动配载工作时的3种状态,当吊机不工作时,吊杆在船体中心线上,移动配载也处于船体的中心线上不移动,见图1a)。当吊机在船体左侧起吊重物时,重物和吊机吊臂的重量会以中心线为转轴,产生向左的扭转力矩,会使船体向左倾斜,为了平衡此力矩,移动配置需向船体中心线右侧移动,从而平衡掉向左的扭转力矩,直到船体大致处于平衡状态,见图1b)。当吊机在船体右侧吊重物时,移动配置则向左侧移动,直到船体大致处于平衡状态,见图1c)。

图1 移动配载工作状态示意图
2 控制系统实现方案
2.1系统框图
控制系统实现采用PLC作为主处理器,采集吊车载重量、吊臂长度、吊臂仰角、船体倾斜、编码器等数据,在处理器中进行算法判断,输出结果驱动变频器对电机进行调速,使得移动配载左右移动。同时将采集的各传感器的数据以及移动配置的位置信息显示在底舱本地显示屏和驾驶室上位机,为本地和远程操控人员提供直观的数据信息,其系统框图见图2。
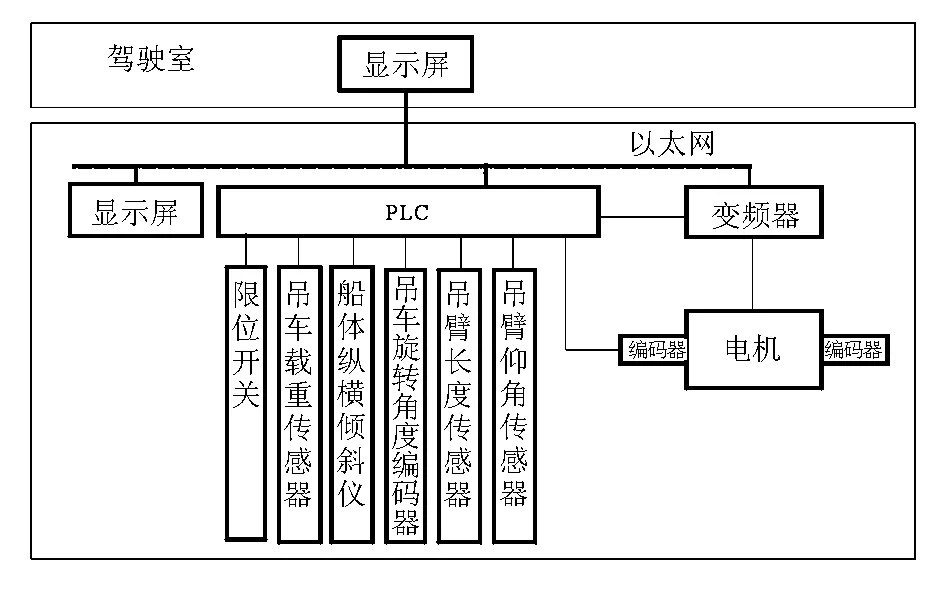
图2 移动配载控制系统框图
为了克服移动配载在运动时的惯性,在需要停止时能够快速静止,配置了制动器和制动电阻,将多余的能量及时消耗,提高控制电机的精确度和稳定性。
2.2控制部分实现
PLC采用西门子S7-200系列,CPU采用CPU224,自带14 DI和10 DO,扩展一个CP243-1以太网通信模块,接入交换机,扩展2个EM231-8路模拟量输入模块。电机功率为4 kW,变频器采用施耐德ATV61系列,变频器启动时带负载启动,启动电流比较大,为留一定的裕量,因此变频器选择5.5 kW。
2.3显示屏实现
选用西门子264.16 mm(10.4 in)触摸屏MP277,该屏带有以太网通信接口,通过接入交换机与PLC通信,在MP277中通过Wincc Flexible组态软件开发界面,工作人员可以很直观地监视和控制移动配载,显示界面可形象指示移动配载的位置和吊机的长度、角度、吊重等参数,并提示报警信息。
2.4保护措施设计
移动配载控制系统关乎船体安全,一旦出现闪失将造成严重的损失和后果,因此需要设计周全的保护措施,具体如下:
(1) 在靠近舱壁的位置加装防撞限位开关,防止移动配载移动时由于惯性撞坏舱壁,通过PLC编程,当限位开关动作时电机立即停止。
(2) 当检测到移动配载和吊机吊臂的位置在船体中心线同一侧时,立即报警,并通过联锁,自动停止吊装作业,然后移动配载位置,使移动配载和吊机不在同侧。
(3) 当船体倾斜度大于5°时,报警信号同吊机联锁,当发生报警时,吊机立即停止吊装作业,直到报警解除。
(4) 每次启动时进行系统自检,通过自检程序检查控制系统的各个部件都能正常工作,防止在工作时由于控制系统的失效导致出现事故。
3 控制策略
本系统的控制模型是一个非常复杂的非线性时变模型,变量多,变量之间的耦合关系复杂,很难建立一个较准确的模型实现对移动配载的精确控制,本项目作为实际工程应用项目,没必要花精力建立精确模型,因此在控制算法上,模糊控制算法是一种能够快速解决问题的方法。模糊控制无须知道被控对象的数学模型,它易于实现对具有不确定性的对象和具有强非线性的对象进行控制,对被控对象特性参数的变化具有较强的鲁棒性,对控制系统的干扰具有较强的抑制能力[1]。
3.1模糊控制器

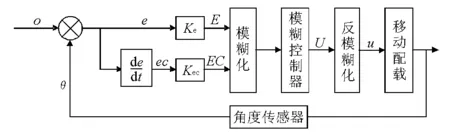
图3 模糊控制系统框图
3.2变量的模糊化和隶属度函数
系统的输入变量为船体倾斜角度偏差e、倾斜度偏差变化率δ,输出变量为配载重物沿船体纵向中心线的位移值,当船体倾斜角度偏差e向左倾斜时为负数,向右倾斜时为正数,不倾斜时为0,同理配载重物在船体纵向中心线左侧时为负位移,右侧为正位移,中心时为0。
系统中船体倾斜角度偏差e、倾斜度偏差变化率δ和控制量u的基本论域分别为:[-5,5],[-0.5,0.5]和[-3.5,3.5],E和EC分别为e和δ模糊化后的变量,U为输出模糊变量。为了比较精确控制移动配载移动的位置,将输入模糊变量E和EC的模糊论域和输出变量U的模糊论域确定为[-3,3],量化为{-3,-2,-1,0,1,2,3},即分为7个控制档位。 所对应的模糊词集为{左大,左中,左小,零,右小,右中,右大},对应的符号表示为{LB,LM,LS,N,RS ,RM ,RB }。
其对应变量的量化因子为Ke=3/5=0.6,Kδ=3/0.5=6,Ku=3/3.5=0.86。
由于三角形隶属度函数在输入值变化时比正态分布或高斯型具有更高的灵活性[2],因此本系统中船体倾斜度偏差与偏差变化率均选取三角形隶属度函数。图 4为各输入变量的隶属度函数,选择的模糊集宽度为7。因为宽度过小会造成部分区间空缺,可能找不到相应的控制规则,收敛性不好; 宽度过大会造成控制规则的重叠部分过多,相互间影响加大并且响应速度也变慢[3]。
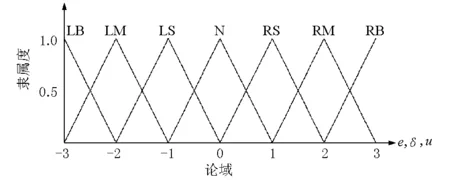
图4 e,δ,u的隶属度函数3.3 模糊控制规则
模糊控制规则是控制器的核心,根据经验总结并且实船调试时不断调整得到49条控制语句,合并构成移动配载控制系统模糊控制规则表,见表1。
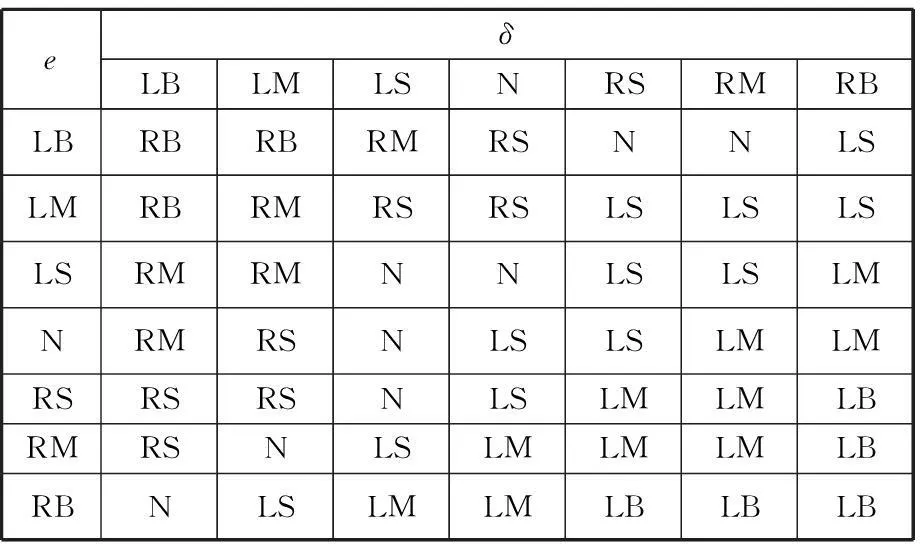
表1 模糊控制规则表
模糊控制查询表通过使用MATLAB的模糊工具箱计算得到,具体操作方法为采用TOOL测试向量法[4]得到模糊控制查询表,见表2。
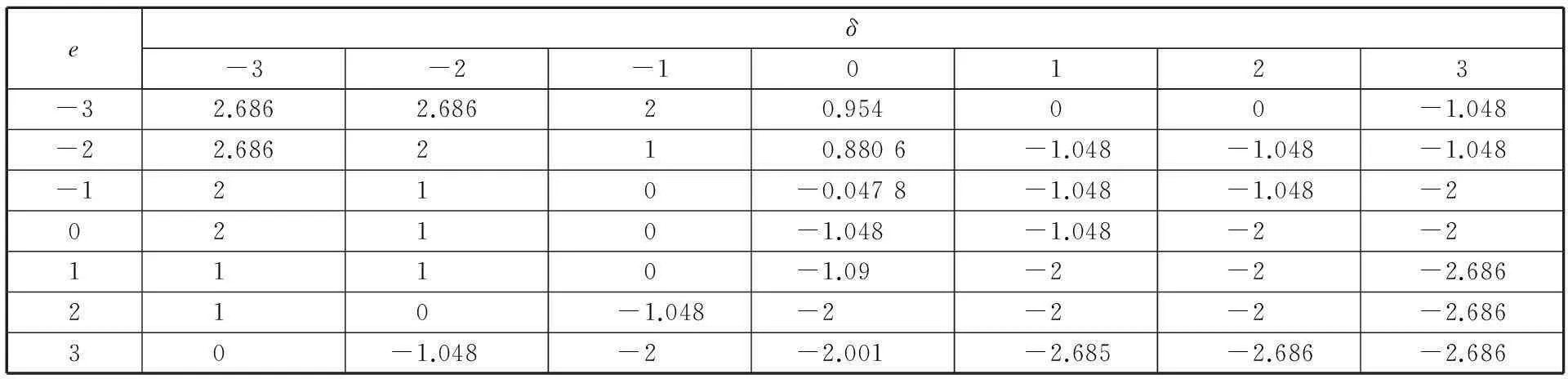
表2 模糊查询控制表
3.3反模糊化
模糊控制器输出的是经过查询模糊规则表后得出的一个模糊语言值,不能被被控对象直接使用,必须要转换成一个精确的控制量,这就是反模糊化的过程。本系统采用重心法计算模糊控制输出的精确控制量。其具体表达式为
式中:n为模糊变量个数;ei为模糊变量;μ(ei)为对应模糊变量的隶属度。
本系统反模糊化的具体过程: 首先倾斜度误差或其误差变化率经量化后得到相应的量化等级,根据量化等级查询执行机构在控制规则表中对应的控制规则并使其激活。
4 PLC控制程序的实现
移动配载控制PLC程序主要包括输入量的采样程序、模糊化和量化等级程序、模糊控制查询程序、执行机构控制程序等。这些程序各自建立子程序,在主程序中调用。
输入量的采样程序主要完成外部吊车载重量、吊臂长度、吊臂仰角、船体倾斜、编码器等传感器的数据,所有的传感器均采用4~20 mA信号,将模拟量信号采样成PLC内部对应的数字量信号,存储在V区。
模糊化和量化等级程序负责计算船体倾斜度偏差和偏差变化率,并作超限处理,使数据在设定的范围内,数据处理后将船体倾斜度偏差和偏差变化率根据前文规则量化并模糊化。
模糊控制查询程序实际是将反模糊化后的数据放置在一个7×7的二维数组中,通过指定存放的首地址和偏移地址对输出值进行访问。
执行机构控制程序负责将查出的输出值送与变频器,告诉变频器向那个方向移动电机多少距离从而带动移动配载向抵消船体倾斜度方向移动一定的位置。
5 系统运行效果
移动配载控制系统已在南京航道局航标船宁道标401,402船中使用,经过实际使用反馈,该系统方案新颖,总体设计合理,安全措施考虑周到,控制算法切实可行,可在类似船舶中进行推广。
[1]丁琳,刘清.模糊自适应控制及其在船舶操纵中的应用[D]武汉: 武汉理工大学,2002.
[2]屈 毅,宁铎,赖展翅,等.基于模糊 PID 控制的温室控制系统[J].计算机应用,2009,29(7):1996-1999.
[3]于海业,于立娟,陈丽梅.基于模糊控制算法的温室变温管理系统[J].农机化研究,2008(5) :25-27.
[4]叶伊莎,任佳.基于Matlab的模糊查询表生成方法探讨[J].实验室研究与探索,2014,33(5):101-106.
收稿日期:2015-06-08
Application of Control System for Mobile Loading in Beacon Boats
ShiJinshan1,XuYingnian2
(1.Wuhan Nanhua Industrial Equipments Engineering Co.,Ltd., Wuhan 430223, China;
2.School of Automation,Wuhan University of Technology, Wuhan 430063, China)
Abstract:If there are no preventive measures, beacon boats with crane would be apt to lean under lifting work. So, this study offers a method of setting mobile loading to avoid boats' leaning. This method is that the mobile loading is moved back and forth according to the boats' lean for balancing the boats. PLC was used as the main controller. The inverter drives motor to make the mobile loading to move by gears and racks. Fuzzy control algorithm was adopted in this control system. With local tests, we developed some fuzzy control rules for the mobile loading control. The actual measurement showed that the control system could achieve satisfactory results.
Key words:mobile loading; fuzzy control; PLC
DOI 10.3963/j.issn.1671-7570.2015.04.055