多部件验证的双层行人检测算法*
2015-12-19谭飞刚刘伟铭
谭飞刚 刘伟铭
(华南理工大学 土木与交通工程学院, 广东 广州516040)
行人是交通系统中的主要参与者,也是交通事故中的主要受害者,如何利用现代科学技术来保护行人的生命安全变得越来越迫切[1-2].行人检测作为智能交通控制系统、先进的辅助驾驶(ADAS)、姿态估计等相关应用的基础也受到广泛的关注[3].虽然ADAS 作为汽车安全的一个重要组成部分受到广泛的关注,并且取得了很多重要成果,但仍然面临着许多挑战[4]:形态各异的外貌特征,复杂多样的背景环境,行人与摄像机之间动态变化的场景,系统实时性与稳定性的严格要求等.例如ADAS 需要准确地检测出车前行人并能及时提醒司机或采取相应措施(如刹车等)来避免人车之间发生冲突.
ADAS 不仅要求能够快速检测出行人为司机提供反应时间,而且要求检测准确度高,尽量减少误报率,因此研究者通过寻找更好的行人描述子或者高效的检测算法来提高行人检测的鲁棒性与实时性.Wu 等[5]利用Edgelet 特征来检测静态图像中的行人.Dalal 等[6]提出的梯度方向直方图(HOG)特征因对光照变化和小量偏移不敏感,且能很好地描述行人的边缘信息而受到许多学者的关注[7-9].Lazebnik 等[10]提出的金字塔梯度方向直方图(PHOG)特征有效地提升了HOG 特征的提取速度.Ojala 等[11]提出的局部二值模式(LBP)特征因具有维度低、计算速度快、能很好地刻画图像的纹理信息而得到广泛的应用,并且出现了许多的变体[12].Chen 等[13]提出的韦伯局部描述子(WLD),虽然对光照和噪声的干扰有一定的鲁棒性, 但其特征提取比较复杂,计算量大.在分析上述特征的基础上,针对Haar 特征维度高、冗余度大[14-15]、LBP 特征无法刻画人眼视觉敏感度的缺陷,文中提出了一种基于显著性的二值化Haar 特征(SLBH).
目前,基于整体行人特征的一些检测方法在无遮挡情况下取得了很好的检测效果[16],但当行人之间发生部分遮挡时,其检测性能会迅速下降;然而,基于部件模型的检测方法能在部分遮挡场景中取得较好的检测效果[17-19].基于部件模型的方法认为行人由多个关键部位组成,如头部、躯干、手和腿等[4,18],根据各部件的检测概率来推断出检测窗口是否包含行人.由于该类方法将行人分散为多个部件检测,增强了其对部分遮挡的鲁棒性,因此,在处理行人部分遮挡问题中受到广泛的关注[20-23].
Wu 等[24]提出了一种基于部件分割过程和不同部件检测间响应的部分遮挡检测方法;该方法将行人分割为11 个部件,利用极大似然函数来联合各个部件检测器的响应值,但需要手动调节各部件的空间结构.Wang 等[19]利用HOG 特征来检测滑动窗口内的局部区域,并根据检测结果来推断该窗口中是否存在部分遮挡;该方法需要预先定义一个空间结构,如行人的上/下半身.Enzweiler 等[17]利用混合专家模型结合HOG 特征、深度信息和光流信息来处理部分遮挡问题,该方法因需要立体视觉和运动信息而导致其应用受到限制.Marín 等[18]利用HOG 特征和LBP 特征对滑动窗口内各个块进行检测,并对检测结果进行分割,进而推断出是否存在遮挡,此方法对块大小比较敏感,而且在训练阶段需要人工标记大量的块标签信息.Ouyang 等[25]通过训练一个双窗口的深度模型来检测部分遮挡的行人.Tang 等[26]通过训练具有部分遮挡的双人可变形部件模型(DMP)[23]来处理行人之间的部分遮挡问题.Gall 等[27]提出了霍夫森林行人检测框架.基于部件的行人检测方法虽然对部分遮挡有较好的鲁棒性,但其计算复杂度随部件数的增加呈指数级增长.有鉴于此,文中提出了一种结合整体与局部特征的双层行人检测算法.
1 SLBH 特征提取
1.1 显著性因子
显著性因子是对局部特征显著性的描述,著名的韦伯定律解释了局部显著性不能由差别阈值的绝对值来进行比较,而应由其相对值进行划定.根据韦伯定律[13],可以计算出中心像素点在其邻域内的显著性因子:

式中,gc为中心像素点的灰度值,N 为邻域个数,gi为对应邻域像素点的灰度值.S(gc)是局部特征显著性的描述,易知S(gc)∈[0, ],其值越大显著性越强.
1.2 改进的LBP
LBP 是一种描述图像局部纹理的算子,因其具有计算简单、对光照变化不敏感等优点而被广泛应用于不同的领域[11,20].LBP 特征的计算式如下:

式中,gi为gc的8 个邻域像素点灰度值,s(x,y)为阈值比较函数,

在计算出整幅图像的LBP 特征值后,统计LBP 特征直方图:

其中判断函数f(x,y)定义为

LBP 特征仅利用了中心像素与其邻域内像素间差异的符号特征,并没有充分利用它们之间的差异信息,因此,LBP 特征缺乏对物体显著性的描述.如图1所示,虽然两个矩形区域具有相同的LBP 特征值,但其显著性因子相差却很大.由韦伯定律可知,显著性因子越大,其显著性越强,所描述的信息也越重要,然而LBP 特征并不能描述这些显著性信息.为此,Cao 等[12]利用中心像素与邻域像素差异的绝对值之和作为权值来增加像素间差异在LBP 特征直方图中的影响,即

式中,K 为最大的LBP 特征值,权值函数为


图1 LBP 特征值与显著性因子计算对比Fig.1 Comparison of calculation between LBP and saliency factor
Cao 等[12]提出的加权LBP直方图虽然考虑了像素邻域间差异的影响,但不能很好地描述特征的局部显著性.因为局部显著性不能由差别阈值的绝对值来进行比较,而应由其相对值进行划定.此外,在加权直方图统计过程中不断累积权重,使得各维度之间相差巨大.受韦伯定理的启发,文中使用更接近人类视觉差异的显著性因子作为权重来统计加权LBP 直方图,其统计函数如下:

图2 8 种扩展的Haar 特征Fig.2 8 kinds of expansion Haar features

式中,S(x,y)为点(x,y)的差异激励.
1.3 SLBH 特征提取
Haar 特征由Viola 等[14]最先提出并首次应用于行人检测中,取得了较好的检测效果.但随着研究的深入,学者们发现原始Haar 特征对于检测静止的、对称的物体比较有效,而对于行人这类非刚性物体,则需要在其他方向上增加能够描述行人运动特点的描述特征.Lienhart 等[15]将原始Haar 特征扩展到14 种.文中使用8 种扩展的Haar 特征,如图2所示.
按照标准步骤提取图2中的8 种Haar 特征,则需要对每个矩形区域进行8 次差值计算,然而通过观察发现,如果将图2中的8 种Haar 特征按照以黑色区域为重叠区域的规则进行组合,则这8 种Haar特征构成了一个3×3 的矩形区域,为方便描述,文中称Haar 特征的一个黑色或者白色矩形区域为单元,而3×3 个单元组成的矩形区域称为一个块.如果对3×3 区域进行从上到下、顺时针编号,则序号分别为c0、c1、c2、c3、c4、c5、c6、c7,中心黑色矩形编号为cc,如图3所示.

图3 8 种Haar 特征组合Fig.3 Combination of 8 kinds of Haar features
然后计算局部二值化Haar 特征(LBH):

式中,ci为第i 个单元内所有像素灰度值之和,

p(k,l)表示图像在点(k,l)处的像素值,w 和h 分别表示单元的宽度和高度.
与传统的Haar 特征提取方法相比,此改进的Haar 特征提取方法具有以下优势:
1)传统方法按单元对进行提取,并且每次只能提取一种Haar 特征;而文中方法则按照中心单元的8 邻域提取,每次可以同时计算8 种不同类型的Haar 特征.
2)传统方法把单元之间差值作为特征值,文中方法引入加权局部二元模式的思想使LBH 特征拥有传统Haar 特征无法比拟的光照不变性.考虑到LBP 模式缺乏显著性描述的缺陷,文中利用式(8)统计LBH 特征直方图(即SLBH 特征)来进一步增加特征对噪声的鲁棒性.SLBH 特征提取算法的具体步骤如下:
(1)将输入图像转换成灰度图像;
(2)按照一定的重叠比将灰度图像划分为宽与高分别为w 和h 的单元;
(3)利用积分图技术求取每个单元的像素灰度值之和;
(4)将中心单元的8 个邻域单元按照图3所示结构组成一个块;
(5)根据式(9)计算每个块内的LBH 值,根据式(1)计算每个块的显著性因子;
(6)按照式(8)统计直方图,即为该图像的SLBH特征.
2 结合SLBH 特征的双层行人检测算法
2.1 双层行人检测算法
线性SVM 分类器既有SVM 的优点又有线性计算的效率,因此,许多行人检测方法都使用线性SVM 分类器.线性SVM 分类器一般都是通过一条或多条分割线/ 一个或多个分割面来划分类别.图4所示为线性SVM 二分类,○类中的A 点被错分到●类中,并且A 点距离分割线非常近,同样●类中的B 点被错分到○类中.在SVM 分类中,分割距离(即分类器响应值)越大表示分类效果越好,而分割距离越小表示其分类的不确定性概率越大,分类正确性的概率越小.
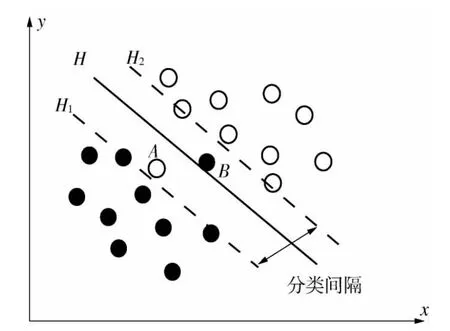
图4 线性SVM 分类器示意图Fig.4 Schematic diagram of liner SVM classifier
基于上述SVM 分类原理及从粗到细的检测思想,文中提出了一种结合SLBH 特征的多部件验证双层行人检测算法.该算法在第1 阶段利用SLBH特征结合线性SVM 分类器进行快速行人检测,并对线性SVM 分类器输出响应值进行判断,如果响应值不处于某阈值区间内,则直接输出该窗口的类别标签(包含行人输出1,其他输出0);否则,验证当前窗口内图像(即进入第2 阶段).在第2 阶段首先对窗口内图像抽样出K 个子区域并提取各子区域的HOG 特征,然后利用随机森林分类器检测出行人各个部件,通过贝叶斯决策计算检测器输出为行人的置信度,最后组合多个部件检测器的置信度来判断该窗口是否包含行人.第2 阶段主要是处理行人遮挡问题和降低误检率,进一步提高算法的鲁棒性和检测率.结合SLBH 特征的双层行人检测算法的具体步骤如下:
1)利用SLBH 特征对图像进行快速行人检测,即s=H(x),x 为SLBH 特征向量,H(·)为线性SVM分类器的分类函数,s 为线性SVM 分类函数的响应值.
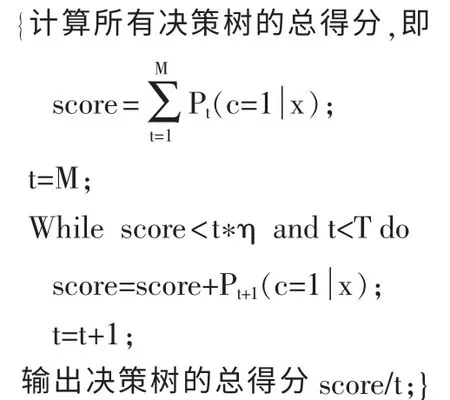
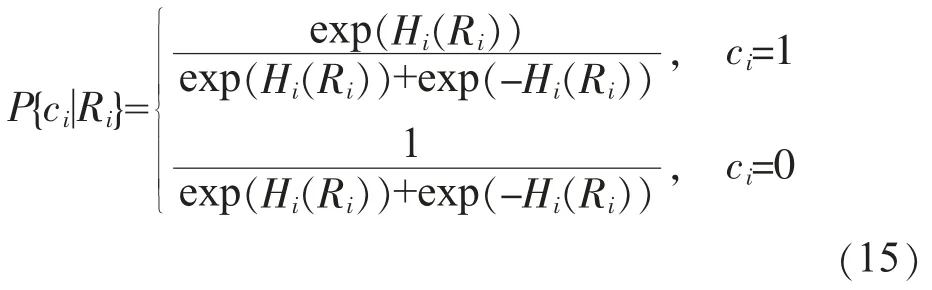
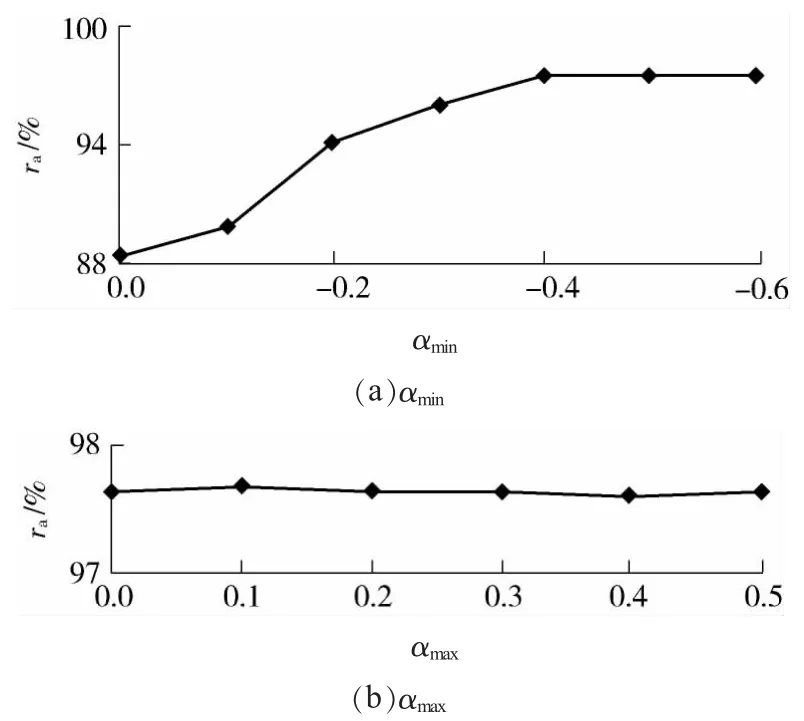
2)判断s 的范围,如果αmin 3)对窗口内图像进行验证 (1)在图像窗口中随机采样出K 个子区域,即R={R1,R2,…,RK},其中每个子区域的宽W 与高H随机产生,且满足12≤W≤20,12≤H≤20. (2)提取各个区域的HOG 特征,利用随机森林分类器进行人体部位检测. (3)根据随机森林分类器输出各部位的响应值计算各部位的检出概率. (4)从检测结果中选择满足条件的子区域作为检测器的输出. 4)结合多个部件检测器的输出并利用贝叶斯定理计算检测器实际输出为行人与非行人的概率. 5)根据贝叶斯推断出的概率判断该窗口是否包含行人. 6)输出该窗口的行人类别标签(包含行人输出1,其他输出0). 行人整体特征检测算法可以比较快速地检测出行人,且具有较好的鲁棒性,但当检测场景中存在行人间部分遮挡时,其检测性能迅速下降.基于人体部位的检测算法将行人看作是多个部件的组合,通过检测人体各个部件来推断出图像中是否包含行人.这类算法因对部分遮挡具有较好的鲁棒性而受到广泛的关注[17,19-20].人体部件可以细分为几百个,而且部件越多对遮挡的鲁棒性越好,但部位越多检测时间越长,进而影响算法的实时性应用要求,因此,目前主要将人体划分为头肩、手、腿和躯干4 个部件. 图像中行人之间的尺度因拍摄视角、拍摄距离等因素的影响而存在很大的差异,并且行人各部件之间的尺寸也存在着很大的差异.例如,头的尺寸远小于躯干的尺寸等.如果使用相同大小的子区域来检测人体部件,则存在很难满足各个部件尺寸的要求,因此,文中提出了一种随机采样子区域的方法.假设当前滑动窗口为Rc(xc,yc,Wc,Hc),那么随机初始化子区域左上角坐标需满足xc≤xi≤xc+Wc和yc≤yi≤yc+Hc,其高和宽都限制在区间[12,20]上,并且保证所采样的子区域都在当前窗口内.按照上述规则采样K 个子区域,即R={R1,R2,…,RK},然后提取各子区域的HOG 特征,最后利用随机森林分类器对各个子区域的特征进行分类,并根据分类结果利用式(11)来确定哪块子区域属于哪个人体部件.为提高各部件特征的提取速度,文中采样类似查表法来提取各部件的HOG 特征. 式中:i∈{hs,arm,leg,torso},表示头肩、手、腿和躯干4 个部件;Ri表示属于部件i 的子区域;表示在子区域Rk内检测为部件i 的概率;vRk表示第k 个部件的特征向量.由于随机采样,因此可能存在子区域重叠现象,如R1和R2都检测为头肩部件.为此,文中采用式(12)来处理子区域重叠现象,并最终确定头肩部件所在区域. 近年来,随机森林因具有可处理大量输入变量、分类器准确度高和学习过程速度快等优点而被广泛应用于行人检测和其他物体的分类.传统的随机森林在进行检测过程中,所有的决策树都参与其中,然而对于一些容易区分的物体来说,所有决策树参与判断并没有增加检测率,反而增加了检测时间.因此,为了提升物体的检测速度,文中采用了一种“软级联”结构[22].假设随机森林中树的最大棵数为T,初始化棵数为M,η 为判断阈值,x 为当前窗口中某人体部位的特征向量,则随机森林软级联算法描述如下: η 为阈值参数,其目的是快速检测出容易识别的样本,从而避免所有的样本都使用T 棵数来判断,进而提升分类器的分类速度,一般取η≥0.985,文中选取η=0.99. 双层行人检测算法需要在那些不确定性概率大的窗口内对人体的4 个部件进行检测,则各关键部件都能被检测出来的概率为 式中:chs=1,carm=1,cleg=1,ctorso=1,分别表示头肩、手、腿和躯干被部件检测器检出;R 为当前滑动窗口区域.根据人的身体结构可知,头肩区域、手和躯干区域以及腿部区域之间存在着一种上下关系.由于各部件检测器相对独立,因此式(13)可转化为 假设Hi(Ri)为随机森林分类器对部件i 的响应值,则各部件的后验概率为 那么式(14)可转化为 设yi∈{0,1},那么可构建如下概率函数: 式中:权值ωi=Entropy({ci}),为部件i 被检测出来时所对应的熵,而部件i 的概率可由式(15)计算得出.熵的计算式为 式中,Pci表示ci被检测出来的概率. 因此,判断当前滑动窗口中包含行人的概率计算式为 而当前窗口不包含行人的概率为 那么得到组合检测器的最终输出为 实验所使用的样本均采集于INRIA 行人样本库,其中训练集中正样本为2416 幅行人图像,负样本为3070 幅;测试集中正样本为1 126 幅,负样本为3 070 幅;负样本都是由INRIA 提供的1 218 幅非行人图像随机裁剪得到.图5为文中算法的实验流程图.为能直观地显示出各种算法的检测性能,文中使用正确检测率(rt)、虚警率(rf)和准确率(ra)以及平均每幅图像检测时间(ta)4 种评价指标: 式中,NTP是行人被检测为行人的个数,NFP是非行人被检测为行人的个数,NTN是非行人被检测为非行人的个数,NFN是行人被检测为非行人的个数. 图5 文中算法的实验流程图Fig.5 Experimental flowchart of the proposed algorithm 为了测试文中改进的Haar 特征性能,选用Haar、LBH、WLBP[11]和SLBH 特征做对比实验,并分别选择SVM 和RF 作为分类器,实验统计结果如表1所示.从表中可知,SLBH 特征的提取时间略高于其他3 种特征,但对于其他评价指标,无论是SVM 还是RF 分类器,SLBH 特征均优于其他3 种特征,而且在RF 分类器上效果更好. 表1 SLBH、LBH、WLBP 和Haar 特征的性能比较Table1 Comparison of performance among SLBH,LBH,WLBP and Haar features 为了估计出各参数对算法性能的影响并寻找出各参数的最优取值范围,对算法中所涉及的4 个参数分别进行交叉验证实验.不难发现,SVM 分类器的准确率受其不确定分类区域范围的影响,下限αmin和上限αmax的一个经验取值范围分别是[-0.6,0]和[0,0.5].如图6(a)所示,当αmin在该区间内变化时,其准确率并不是随着αmin变小而提高,而是在αmin小于-0.4 之后基本上趋于不变;图6(b)中,当αmax在[0.1,0.5]之间变化时,准确率变化很小,而αmax在[0,0.1]之间时准确率处于提升状态.在对滑动窗口内图像进行随机抽取子区域时,并不是抽取的子区域数K 越多越好,因为区域间存在重叠,而且抽取的子区域越多,特征提取以及检测判断耗时也越多,K 的经验取值范围是[10,20].K 对文中算法检测性能的影响如图7所示,从图中可以看出:当K≥17时,检测性能基本上保持稳定且达到最佳值;当K<17时,检测性能变化较大,可能是因随机抽样不充分所致. 图6 αmin 和αmax 的ROC 曲线Fig.6 ROC curves of αmin and αmax 图7 K 对文中算法检测性能的影响Fig.7 Effect of K on detection performance of the proposed algorithm 在相同的实验条件下选择文献[4]、文献[11]、文献[18]和文中算法进行对比实验,并使用TPR-FPR ROC 曲线来对比分析各种算法的优越性,实验结果如图8所示.在ROC 曲线中,曲线离左上角的距离越近代表算法性能越好,而从图8中不难看出,文中算法的检测率高出其他算法.文献[4]使用Haar 特征并结合行人上/下两部分进行验证,虽然与文中算法存在部分类似,但文中算法使用多部件检测,并且在虚警率为10%时正确检测率就远高于文献[4]算法.文献[11]算法使用NRLBP 和Shape 特征,NRLBP 特征缺乏对物体的显著性描述,而行人在部分遮挡时形状会发生改变,因此该算法在部分遮挡情况下的检测鲁棒性不佳.这也体现了文中提出的多部件双层行人检测算法在部分遮挡情形下的优越性. 图8 不同检测算法的实验结果对比Fig.8 Comparison of experimental results among different detection algorithms 针对Haar 特征维度高、冗余大以及对光照敏感等缺陷,文中提出了一种显著性的二值化Haar 特征,该特征通过结合显著性和加权LBP 思想来减少Haar 特征的维数,增强其纹理描述能力和对光照的鲁棒性.此外,在行人存在部分遮挡的环境下,基于整体特征提取的算法检测效果不理想,而基于部件的行人检测算法对行人部分遮挡具有较好的检测效果.为此,文中根据从粗到细的思想提出了结合SLBH 特征的双层行人检测算法.在INRIA 行人样本库上的对比实验结果表明,文中算法的正确检测率优于其他算法. [1]苏松志,李绍滋,陈淑媛,等.行人检测技术综述[J].电子学报,2012,40(4):814-820.Su Song-zhi,Li Shao-zi,Chen Shu-yuan,et al.A survey on pedestrian detection [J].Acta Electronica Sinica,2012,40(4):814-820. [2]许腾,黄铁军,田永鸿.车载视觉系统中的行人检测技术综述[J].中国图象图形学报,2013,18(4):359-367.Xu Teng,Huang Tie-jun,Tian Yong-hong.Survey on pedestrian detection technology for on-board vision system [J].Journal of Image and Graphics,2013,18(4):359-367. [3]Dollar P,Wojek C,Schiele B,et al.Pedestrian detection:an evaluation of the state of the art [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2012,34(4):743-761. [4]Mogelmose A,Prioletti A,Trivedi M M,et al.Two-stage part-based pedestrian detection [C]//Proceedings of the 15th International IEEE Conference on Intelligent Transportation Systems.Anchorage:IEEE,2012:73-77. [5]Wu B,Nevatia R,Li Y.Segmentation of multiple,partially occluded objects by grouping,merging,assigning part detection responses [C]//Proceedings of 2008 IEEE Conference on Computer Vision and Pattern Recognition.Anchorage:IEEE,2008:1-8. [6]Dalal N,Triggs B.Histograms of oriented gradients for human detection [C]//Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.San Diego:IEEE,2005:886-893. [7]孙锐,陈军,高隽.基于显著性检测与HOG-NMF 特征的快速行人检测方法[J].电子与信息学报,2013,35(8):1921-1926.Sun Rui,Chen Jun,Gao Jun.Fast pedestrian detection based on saliency detection and HOG-NMF features [J].Journal of Electronics & Information Technology,2013,35(8):1921-1926. [8]Zhu Q,Yeh M C,Cheng K T,et al.Fast human detection using a cascade of histograms of oriented gradients [C]//Proceedings of 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.New York:IEEE,2006:1491-1498. [9]Gan G,Cheng J.Pedestrian detection based on HOG-LBP feature [C]//Proceedings of the 7th International Conference on Computational Intelligence and Security.Kyoto:IEEE,2011:1184-1187. [10]Lazebnik S,Schmid C,Ponce J.Beyond bags of features:spatial pyramid matching for recognizing natural scene categories [C]//Proceedings of 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.New York:IEEE,2006:2169-2178. [11]Ojala T,Pietikainen M,Maenpaa T.Multiresolution grayscale and rotation invariant texture classification with local binary patterns [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(7):971-987. [12]Cao Y,Pranata S,Nishimura H.Local binary pattern features for pedestrian detection at night/dark environment[C]//Proceedings of the 18th IEEE International Conference on Image Processing.Brussels:IEEE,2011:2053-2056. [13]Chen J,Shan S,He C,et al.WLD:a robust local image descriptor [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(9):1705-1720. [14]Viola P,Jones M J,Snow D.Detecting pedestrians using patterns of motion and appearance [J].International Journal of Computer Vision,2005,63(2):153-161. [15]Lienhart R,Maydt J.An extended set of haar-like features for rapid object detection [C]//Proceedings of 2002 International Conference on Image Processing.Rochester:IEEE,2002:I-900-I-903. [16]胡彬,赵春霞,孙玲.基于多特征融合的行人检测[J].图学学报,2013,34(4):29-34.Hu Bin,Zhao Chun-xia,Sun Ling.Human detection based on multi features fusion [J].Journal of Graphics,2013,34(4):29-34. [17]Enzweiler M,Eigenstetter A,Schiele B,et al.Multi-cue pedestrian classification with partial occlusion handling[C]//Proceedings of 2010 IEEE Conference on Computer Vision and Pattern Recognition.Francisco:IEEE,2010:990-997. [18]Marín J,Vázquez D,López A M,et al.Occlusion handling via random subspace classifiers for human detection[J].IEEE Transactions on Cybernetics,2014,44(3):342-354. [19]Wang X,Han T X,Yan S.An HOG-LBP human detector with partial occlusion handling [C]//Proceedings of the 12th International Conference on Computer Vision.Kyoto:IEEE,2009:32-39. [20]Felzenszwalb P F,Girshick R B,McAllester D.Cascade object detection with deformable part models [C]//Proceedings of 2010 IEEE Conference on Computer Vision and Pattern Recognition.San Francisco:IEEE,2010:2241-2248. [21]Sermanet P,Kavukcuoglu K,Chintala S,et al.Pedestrian detection with unsupervised multi-stage feature learning[C]//Proceedings of 2013 IEEE Conference on Computer Vision and Pattern Recognition.Portland:IEEE,2013:3626-3633. [22]Marin J,Vázquez D,López A M,et al.Random forests of local experts for pedestrian detection[C]//Proceedings of 2013 IEEE International Conference on Computer Vision.Sydney:IEEE,2013:2592-2599. [23]Felzenszwalb P F,Girshick R B,McAllester D,et al.Object detection with discriminatively trained part-based models [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(9):1627-1645. [24]Wu B,Nevatia R.Detection and segmentation of multiple,partially occluded objects by grouping,merging,assigning part detection responses [J].International Journal of Computer Vision,2009,82(2):185-204. [25]Ouyang W,Zeng X,Wang X.Modeling mutual visibility relationship in pedestrian detection [C]//Proceedings of 2013 IEEE Conference on Computer Vision and Pattern Recognition.Portland:IEEE,2013:3222-3229. [26]Tang S,Andriluka M,Schiele B.Detection and tracking of occluded people [J].International Journal of Computer Vision,2014,100(1):58-69. [27]Gall J,Lempitsky V.Class-specific hough forestsfor object detection [M].London:Springer,2013:143-157.2.2 人体部件检测


2.3 贝叶斯决策








3 实验与结果分析


3.1 SLBH 特征性能评估

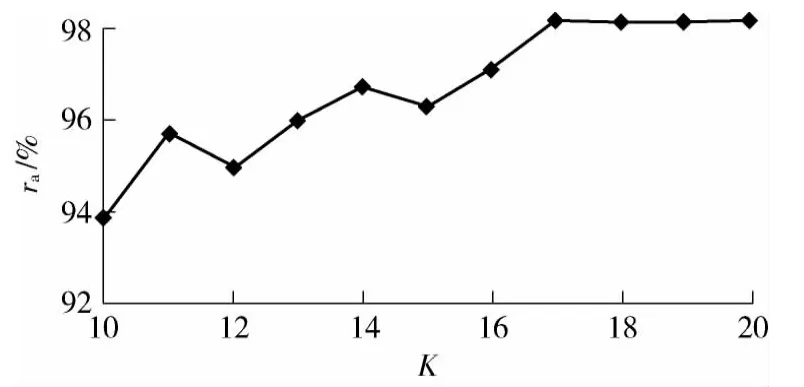
3.2 参数估计
3.3 检测性能对比

4 结论
