参数在线学习的动态贝叶斯网络态势估计算法*
2015-12-19袁德平郑娟毅史浩山
袁德平 郑娟毅 史浩山
(1.西北工业大学 电子信息学院, 陕西 西安710129;2.西安邮电大学 通信与信息工程学院, 陕西 西安710121)
在现代战争中,通过对大量的精确或不确定的知识和信息进行推理来实现对战场态势的估计,对做出正确的指挥与决策有着重大的意义.基于贝叶斯网络(BN)的推理方法不仅应用在推理预测中[1],还应用于战场的态势估计中.当前应用静态BN 进行战场态势估计的算法[2-3]难以适应目标信息变化的连贯性和战场环境的动态变化;而应用动态贝叶斯网络(DBN)进行态势估计[4-6]时,虽然能适应战场环境的动态变化,但DBN 网络参数依靠专家经验给出,且在推理过程中固定不变,不能随环境的变化而变化,因此无法保证推理结果的合理性与准确性.基于在线参数学习的DBN 算法能更合理地随环境的变化修改网络参数,具有更好的态势估计效果.由于战场态势更新和态势要素生成受其周期的限制,观测样本在一般情况下具有小样本的特性.对于观测值具有小样本的问题,采用DBN 进行参数学习时,最大似然估计法会产生较大的误差[7],而采用最大期望法(EM)学习的实时性和精度较差[8].由于小样本含有的分布信息量少,故采用自助法将样本的分布视为总体分布时,存在以偏概全的行为较大的误差[9].参数的贝叶斯估计方法利用了样本的先验信息,从而在进行参数估计时能够得到更精确的预测结果,其中基于狄利克雷共轭先验分布的参数估计方法,以其先验分布与后验分布形式一致而使计算简单.为快速实现对战场态势的精确估计,文中提出了一种带先验约束DBN(PS-DBN)在线学习的态势估计方法.即在DBN 结构模型确定的情况下,先用前向递归方法获得DBN 的时间片间的隐变量状态转移概率和时间片内的隐变量与观测变量间的转移概率,然后用狄利克雷先验分布作为这些概率的先验分布,用矩估计法对先验分布的超参数进行估计,最后用该先验分布采样形成的等价样本与观测值对DBN 的参数进行学习.
1 态势估计构架及DBN 模型
文中针对态势要素的不确定性,采用DBN 对态势要素进行推理,对目标态势作出估计.
1.1 战场环境态势估计的构架
在军事上,态势估计包括态势觉察、态势理解和态势预测3 个阶段.态势觉察主要实现态势元素的提取和目标编群;对态势觉察的结果进行推理,可获得高层次态势估计(态势理解和态势预测)[10].
态势估计的结构原理如图1所示,通过多传感器对目标进行跟踪和识别后,获得目标的各种属性.从目标的多种属性中提取态势要素,通过对态势要素的推理估计出目标当前的态势[11].两次态势要素生成的时间间隔称为态势要素生成周期Tsu;经过一定次数的Tsu而形成的态势要素集,通过推理方法实现一次态势结果的更新时间称为态势更新周期Ts.战场态势的更新周期是基于作战节奏并随作战意图、作战效果的显著变化而确定的平均更新周期,以美军为例,美军陆、海、空军战役级态势更新周期分别为5min、1min 和20s,战术级态势的更新周期更短,要求更快地实现态势估计.

图1 态势估计的结构Fig.1 Structure of situation assessment
1.2 DBN 模型及前向递归推理
现代战场敌我态势瞬息万变,将DBN 模型应用于态势估计,不但满足态势要素的不确定性,还能满足对当前态势的动态分析和预测,比静态BN 更具合理性[12].
DBN 是一个有向无环结构的拓扑图,是依据观测数据Y={y1,y2,…,ym}推导出隐变量X={x1,x2,…,xn}最大可能取值的概率.一个简单的单隐变量的DBN 图如图2所示,其中Y 表示离散变量,具有m种可能的值[13],X={x}表示单隐变量,设x 存在n种状态.在估计战场环境态势时,DBN 中的隐变量的状态节点对应于态势节点,观测数据节点对应于态势要素节点,也就是根据态势要素节点的观测值推导出态势节点的状态,以解释态势发展的趋势.

图2 单隐变量的DBN 模型Fig.2 DBN model of single hidden variable
为确定态势节点的状态,定义DBN 的参数如下.
初始隐变量先验分布矩阵为π,初始状态是依专家经验给出,其中π=(πi)1×n,πi=P(xi=i),i=1,2,…,n.
隐变量间状态转移矩阵A=(aij)n×n,其 中aij=
隐变量与观测变量间的状态转移矩阵B=(bi)1×n,其中;k表示观测变量在t 时刻的状态.
在动态变化时,随着观测状态变量的随机变化,对DBN 的推理可以采用前向递归方法进行[14].
根据初始条件,计算初始时刻的后验概率ψ1:
式中:i,j=1,2,…,n.再计算t-1 时刻到t 时刻隐变量之间的转移概率:

2 狄利克雷先验分布约束的DBN 算法
战场环境下,一个态势更新周期内生成的态势要素在进行参数估计时具有小样本的特点.尤其对空战术级作战态势估计,要求态势更新周期为数秒.假设跟踪雷达精确跟踪级的数据率是亚秒级,且一次态势要素生成所耗时间在雷达对目标两次精确跟踪时间内可实现,那么一个态势更新周期内态势要素的生成最多只有几十批,依靠这些样本数据对DBN 的参数进行估计,属于小样本参数估计.由于小样本在基于统计方法的参数估计中存在较大的误差,故文中提出的带先验约束DBN 推理方法(PS-DBN)是在狄利克雷先验分布对DBN 参数进行估计下,采用前向递归法对DBN 进行推理.
2.1 狄利克雷先验分布及超参数的矩估计法
设多分布向量X=(x1,x2,…,xn),X 分布是狄利克雷分布,那么
其中Γ(·)为Gamma 函数,α=(α1,α2,…,αn)为狄利克雷分布的超参数[15].
狄利克雷分布的一阶矩E(xi)和二阶矩E(xixj)有如下性质:
根据式(6)和(7)可以推导出超参数与向量X 的均值E(xi)与二阶矩E(xixj)的关系为

2.2 PS-DBN 算法

分别根据式(6)、(7)计算概率向量ai=(ai1,ai2,…,ain)的均值E(aij)、二阶混合矩E(aipaiq)与超参数的关系,得出与式(8)形式一致的超参数与向量均值、二阶矩的关系:

其中p,q∈{1,2,…,n},p≠q.
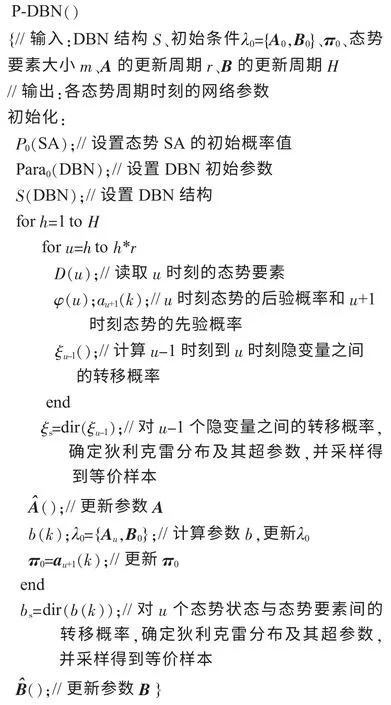
DBN 网络初始参数0={A0,B0},初始先验条件为π0,后验概率为φ,先验概率为a(k),隐变量之间的转移概率为ξij.每个态势更新周期包含r 个态势要素生成周期,r 根据实际需要确定.参数B 更新需要的Ts的次数H 根据需要确定.态势要素D={y1,y2,…,ym}.
在数据完备情况下参数估计的过程如下:当一个Ts到来,即r 个Tsu到来时,通过前向递归算法可以获得r-1 个隐状态j 到隐状态i 之间的转移概率ξij.对于每一种转移概率,采用狄利克雷分布模型定义先验分布,采用矩估计法计算先验分布的超参数以确定先验分布,并对该分布进行采样形成等价样本,通过递归计算样本ξMij(Μ=1,2,…,r)与等价样本ξisj(s=1,2,…,r)的均值,对当前时刻的参数A 进行更新:
经过H 个Ts后,对生成的H 组(k)进行狄利克雷分布参数估计,估计出参数后进行采样形成等价样本,以该等价样本与H 组(k)的均值对参数B 进行更新.
参数估计及推理的算法步骤如下:
2)在Ts1u到来后,根据态势要素D1={y11,y21,…,ym1}及、π0计算出第1 时刻隐变量的后验概率φ1,并根据φ1和 0 计算出下一时刻隐变量的先验概率a2(k).
3)Ts2u到来后,根据态势要素D2={y12,y22,…,ym2}、计算出φ2,并根据φ2和 0 计算出Ts3u时刻隐变量的先验概率a3(k),计算Ts1u到Ts2u时隐变量之间的转移概率.
4)依此类推,直到Tsru时计算出φr、ar+1(k)和.
5)T1s结束,用ξikj(k=1,2,…,r-1)对参数A0进行狄利克雷法采样,并更新形成,将作为T2s的隐变量间的转移矩阵,即计算bj1(k).
7)根据H 个Ts生成的bjl(k)(l=1,2,…,m)对参数B0进行狄利克雷法采样,并更新形成,将作为从Tm+1s开始的隐变量与观测变量间的转移矩阵,即B1=
8)依此类推,参数A 在每个Ts内更新一次,参数B 在H 个Ts内更新一次.
完整的P-DBN 算法的伪代码如下:
3 仿真及结果分析
想定一空战场景:我方实时监视敌方飞机状态,并对敌方飞机意图进行推断.假设敌方飞机的ZU作战企图有攻击(AT)、侦查(SU)和相持(ST)3 种状态.为快速准确地推断敌方意图,我方根据各种传感器收到该目标的有关状态属性以形成态势要素,实现对敌机的战术态势估计.将推断出的态势状态设置为态势节点,观测到的事件设置为事件节点,构建如图3所示的DBN 模型.

图3 空中目标作战企图的动态贝叶斯网络模型Fig.3 Dynamic Bayesian network model for the intention of aerial target
事件节点的敌、我属性分别对应敌我识别(IF)的1、2 状态;敌方机载雷达的开、关分别对应雷达(RA)的1、2 状态;敌方飞机距离的长、中、短分别对应距离(DI)的1、2、3 状态;敌方飞机的高、中、低方位威胁等级分别对应方位(AZ)的1、2、3 状态;敌方飞机速度的高、中、低速分别对应速度(SP)的1、2、3状态.
为评估文中算法对参数学习的实时性和精度,构造一组标准参数,包括隐变量之间、隐变量与条件变量之间的条件转移概率,并以此网络参数模型采样得到的观测值作为参数学习的输入态势要素.通过统计几个态势周期内态势估计的平均耗时与最大耗时来比较文中算法与EM 算法在该标准模型下参数学习的实时性.通过两个态势周期的参数学习给出网络参数的学习结果,并给出态势周期为2、6、8、16 时的学习精度,用来表示网络参数的学习精度.标准参数值如表1、2 所示.
表1 标准的参数值Table1 Standard values of parameter
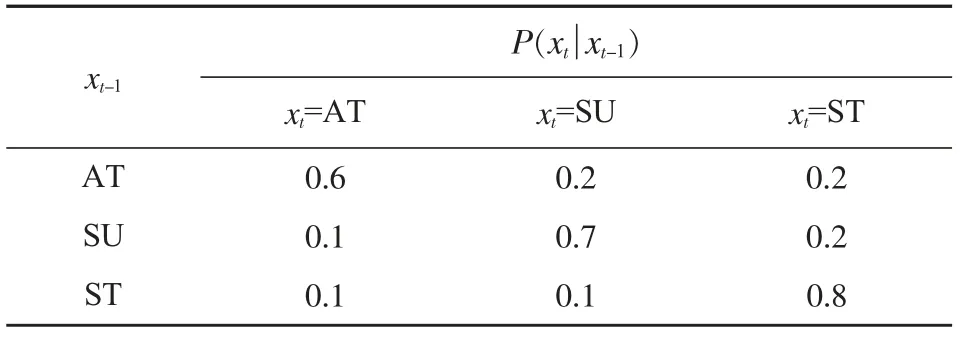
表1 标准的参数值Table1 Standard values of parameter
xt-1)xt=AT xt=SU xt=ST AT 0.6 0.2 0.2 SU 0.1 0.7 0.2 ST 0.1 0.1 0.8 xt-1 P(xt
设态势更新周期Ts=20s,雷达对目标跟踪后到形成态势要素需要2 s,也就是态势要素更新周期Tsu=2s,在Pentium 双核处理器、主频2.1 GHz、2 GB内存的计算机上用Matlab R2009b 软件对文中算法的有效性和准确性进行仿真.主要参数设置如下:隐变量的初始先验概率P(AT)=P(SU)=P(ST)=1/3,初始隐变量间的转移概率如表3所示.
表2 标准的参数值Table2 Standard values of parameter

表2 标准的参数值Table2 Standard values of parameter
P(yt xt)yt 状态值IF 1 2 RA 1 2 xt=AT xt=SU xt=ST 0.5 0.2 0.6 0.3 0.4 0.3 0.2 0.4 0.1 0.5 0.2 0.3 DI 12 3 0.5 0.4 0.1 0.1 0.4 12 2 3 0.2 0.3 0.5 0.8 0.3 0.3 0.4 0.1 AZ 0.4 0.2 3 1 0.4 0.8 0.3 0.1 0.3 0.1 SP 0.6 0.2 0.3 0.5 0.1 0.3
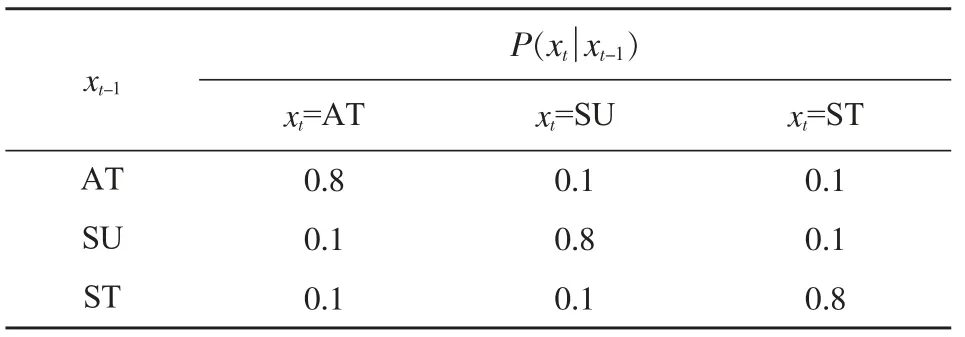
表3 初始隐变量间的转移概率Table3 Initial transition probabilities between hidden variables
初始隐变量与观测变量间的转移概率如表4所示.xt表示态势的状态,yt表示态势要素的不同状态.
通过文献[12]提供的网址下载EM 算对DBN进行推理.EM 和PS-DBN 算法采用的初始条件与观测数据一致,PS-DBN 算法中参数r 取10,H 取8,EM 算法的迭代次数为10.对每个态势要素生成周期实现估计的平均耗时与最大耗时进行记录,结果如表5所示.EM 算法的计算复杂度为O(nkI),而PS-DBN 算法核心部分的计算复杂度为O(K2L),其中n 是观测值,I 是迭代次数,K 是态势状态数,L是态势要素序列长度.在态势状态数为3、态势要素序列长度为5 的情况下,PS-DBN 算法的估计速度明显高于EM 算法.从表5可以看出,经过一个态势周期的态势推理,PS-DBN 算法参数学习的实时性明显高于EM 算法.

表4 初始隐变量与观测变量间的转移概率Table4 Initial transition probabilities between hidden variables and observed variables

表5 EM 与PS-DBN 算法的耗时比较Table5 Comparison of time consuming between EM algorithm and PS-DBN algorithm s
对PS-DBN 和EM 算法进行两个态势周期的参数学习(即Ts=2),结果如表6、7 所示.
表6 参数的学习结果Table6 Learning results of parameter
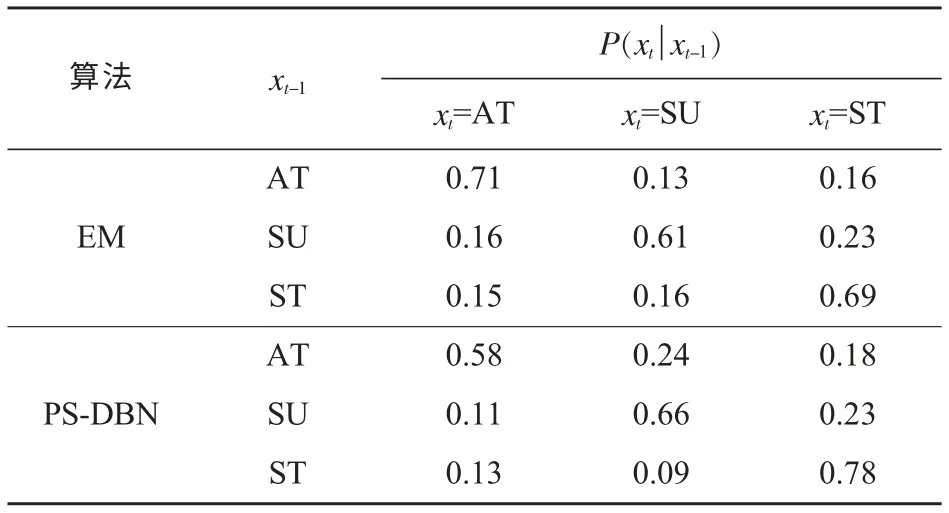
表6 参数的学习结果Table6 Learning results of parameter
P(xt算法 xt-1 EM AT SU xt-1)xt=AT xt=SU xt=ST 0.71 0.13 0.16 0.16 0.61 0.23 ST AT 0.15 0.58 0.16 0.24 0.69 0.18 PS-DBN SU ST 0.11 0.13 0.66 0.09 0.23 0.78
从表6、7 可以看出,在参数学习时PS-DBN 算法的精度高于EM 算法.为直观看出PS-DBN 和EM算法的参数学习精度,采用KL(Kullback-Leibler)距离表示算法学习的参数与标准参数的相似度:

其中f1(x)和f2(x)为两个概率分布.dKL(f1/f2)≥0,其值越小表示两个分布越接近.
表7 参数的学习结果Table7 Learning results of parameter
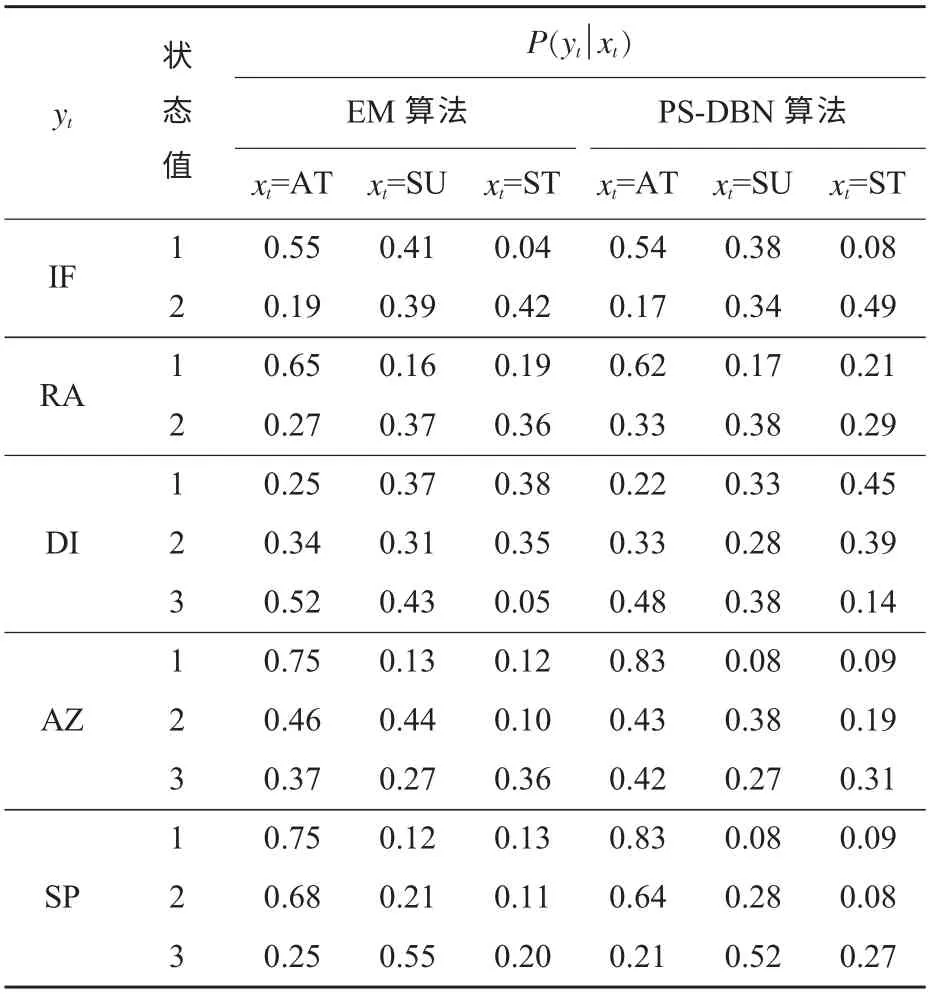
表7 参数的学习结果Table7 Learning results of parameter
P(yt xt)EM 算 法 PS-DBN 算 法xt=AT xt=SU xt=ST xt=AT xt=SU xt=ST IF 1 0.55 0.41 0.04 0.54 0.38 0.08 2 0.19 0.39 0.42 0.17 0.34 0.49 RA 1 0.65 0.16 0.19 0.62 0.17 0.21 2 0.27 0.37 0.36 0.33 0.38 0.29 yt状态值DI 1 0.25 0.37 0.38 0.22 0.33 0.45 2 0.34 0.31 0.35 0.33 0.28 0.39 3 0.52 0.43 0.05 0.48 0.38 0.14 AZ 1 0.75 0.13 0.12 0.83 0.08 0.09 2 0.46 0.44 0.10 0.43 0.38 0.19 3 0.37 0.27 0.36 0.42 0.27 0.31 SP 1 0.75 0.12 0.13 0.83 0.08 0.09 2 0.68 0.21 0.11 0.64 0.28 0.08 3 0.25 0.55 0.20 0.21 0.52 0.27
表8给出了Ts取不同值时两种算法的参数学习精度.从表中可以看出,在Ts=2s 时,PS-DBN 算法的参数A 和B 的学习精度高于EM 算法.随着态势周期的增加,参数B 的学习精度更高,且在态势周期为8 和16s 时,由于PS-DBN 算法的参数B 的更新加入了先验信息,使得参数B 的学习精度明显提高,这说明在小样本下,PS-DBN 算法具有较高的参数学习精度.
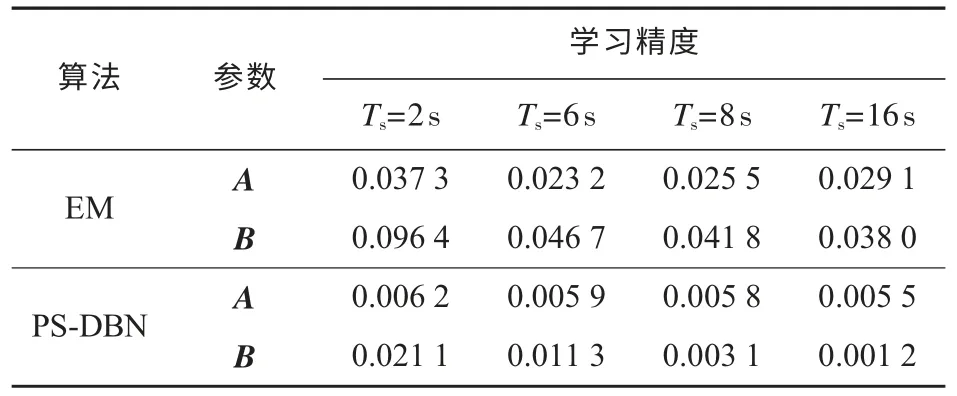
表8 两种算法的参数学习精度比较Table8 Comparison of parameter learning precision between two algorithms
4 结论
针对战场环境目标态势估计中,一个态势更新周期内生成的态势要素在进行参数估计时具有小样本的特点,文中在前向递归算法的基础上,采用狄利克雷先验分布对DBN 参数进行估计,将先验信息融入到小样本数据的参数估计中,从而保证了小样本下对战场环境目标态势估计的精确性和有效性.仿真实验结果显示:文中算法能够快速估计出态势节点的状态概率,可以满足目标跟踪中精跟级态势估计的参数在线学习和态势的在线推理;文中算法学习到的参数更加接近真实网络的实际参数.
[1]宗芳,张慧永,贾洪飞.基于贝叶斯网络的停车收费政策评价[J].华南理工大学学报:自然科学版,2010,39(7):78-83.Zong Fang,Zhang Hui-yong,Jia Hong-fei.Evaluation of parking pricing policy based on Bayesian network [J].Journal of South China University of Technology:Natural Science Edition,2010,39(7):78-83.
[2]王三民,王宝树.贝叶斯网络在战术态势评估中的应用[J].系统工程与电子技术,2004,26(11):1620-1623.Wang San-min,Wang Bao-shu.Application of Bayesian networks in tactical situation assessment [J].Systems Engineering and Electronics,2004,26(11):1620-1623.
[3]王晓帆,王宝树.基于贝叶斯网络和直觉模糊推理的态势估计方法[J].系统工程与电子技,2009,31(11):2742-2745.Wang Xiao-fan,Wang Bao-shu.Situation assessment method based on Bayesian network and intuitionistic fuzzy reasoning [J].Systems Engineering and Electronics,2009,31(11):2742-2745.
[4]史建国,高晓光,李相民.基于离散模糊动态贝叶斯网络的空战态势评估及仿真[J].系统仿真学报,2006,18(5):1093-1096.Shi Jian-guo,Gao Xiao-guang,Li Xiang-min.Modeling air combat situation assessment by using fuzzy dynamic Bayesian network[J].Journal of System Simulation,2006,18(5):1093-1096.
[5]Li Fu,Liu Jianbo,Chang Feihu,et al.Situation assessment for beyond-visual-range air combat situation assessment based on dynamic Bayesian network [C]//Proceedings of the 25th Chinese Control and Decision Conference.Guiyang:IEEE,2013:591-594.
[6]Zou M,Conzen S D.A new dynamic Bayesian network approach for identifying gene regulatory networks from time course microarray data [J].Bioinformatics,2005,21(1):71-79.
[7]Meng D,Sivakumar K,Kargupta H.Privacy-sensitive Bayesian network parameter learning [C]//Proceedings of the Fourth IEEE International Conference on Data Ming.Brighton:IEEE,2004:487-490.
[8]Lamine F B,Kalti K,Mahjoub M A.The threshold EM algorithm for parameter learning in Bayesian network with incomplete data[J].International Journal of Advanced Computer Science and Applications,2011,2(7):86-91.
[9]Friedman N,Goldszmidt M,Wyner A.Data analysis with Bayesian networks:a bootstrap approach [C]//Proceedings of the 15th Conference on Uncertainty in Artificial Intelligence.Stockholm:Morgan Kaufmann,1999:196-205.
[10]唐政,高晓光.基于离散动态贝叶斯网络的辐射源目标识别研究[J].系统仿真学报,2009,21(1):117-120.Tang Zheng,Gao Xiao-guang.Research on radiant point identification based on discrete dynamic Bayesian network [J].Journal of System Simulation,2009,21(1):117-120.
[11]Steinberg A.A model for situation and threat assessment[C]//Information Fusion for Command Support.Neuilly-sur-Seine:RTO,2006:KN1-1-KN1-4.
[12]Powell Gerald M.Tactical situation assessment challenges and implications for computational support [C]//Proceedings of the 8th International Conference on Information Fusion.Piscataway:IEEE,2005:xxiv-xxvi.
[13]任佳,高晓光,茹伟.目标数据缺失下离散动态贝叶斯网络的参数学习 [J].系统工程与电子技术,2011,33(8):1885-1890.Ren Jia,Gao Xiao-guang,Ru Wei.Parameter learning of discrete dynamic Bayesian network with missing target data [J].Systems Engineering and Electronics,2011,33(8):1885-1890.
[14]Tomovic A,Oakeley E J.Quality estimation of multiple sequence alignments by Bayesian hypothesis testing [J].Bioinformatics,2007,22(18):2488-2490.
[15]Murphy K P.Dynamic Bayesian networks:representation,inference and learning [D].Berkeley:Computer Science Division,UC Berkeley,2002.
