多特征协同的双层组合结构行人监控识别方法
2015-11-22刘方方耿曙杨
黄 洁 邵 俊 刘方方 耿曙杨 黄 锐 宋 双
(江苏师范大学物理与电子工程学院 江苏徐州 221116)
多特征协同的双层组合结构行人监控识别方法
黄 洁 邵 俊 刘方方 耿曙杨 黄 锐 宋 双
(江苏师范大学物理与电子工程学院 江苏徐州 221116)
为了有效解决公共场所人流量统计过程中,因行人遮挡、粘连所引发的的在行人识别上的低检测率、高虚警率、实时性不足的缺点,对聚集型B-Haar特征和Edgelet特征协调进行特征提取,设计了双层组合结构行人识别模型,该模型的上层提取候选行人目标,确保较高的检测识别率;下层对候选行人多部位检测然后判断候选目标是否为行人,实现降低虚警概率,保证实时性的目标。
聚集型B-HaarEdgelet特征 行人识别 贝叶斯原理
引言
在实现公共场所的高峰人流控制、分析安全隐患,实施可靠的人流量统计是必不可少的。在行人识别中,基于视频图像处理的行人识别检测方法因具有低成本、高精确度、应用时安装方便的等优点,而成为研究的热点。现有的行人检测算法主要有:基于背景差分[1]、帧间差分[2]、模板匹配[3]等行人检测方法。
但是该方法在实际应用中,又不可避免的面对以下问题:①应用环境自身因背景、光照、阴影等变化所带来的复杂性;②行人固有特性导致难以辨识。
为此,本文针对行人分类识别模型的效率问题,以多特征的协同检测的模式,循序渐进,先整体后局部的方式结合贝叶斯综合决策原理构建高效的双层组合识别模型。
1.双层树状组合分类识别模型
笔者在研究过程中提出了基于多特征协调识别检测,利用双层的组合分类模型(图1),按整体到局部,循序渐近的基本思路,主要包括两层具有一定差异的树状结构,其中,上层是完全二叉树结构,与聚集型B-Haar特征相结合对候选行人。
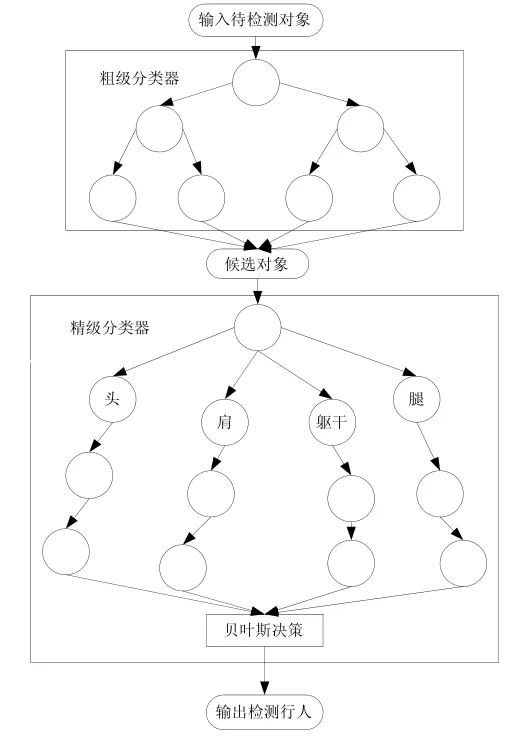
图1 多特征协同的双层组合结构分类图
进行提取,其主要是用来进行对非遮挡目标进行整体粗选,筛选出候选行人,确定一定的疑似候选区域;而下层主要由四个分支的串联树状结构组成,其主要是通过特征对人体部分特点进行提取,同时还需要利用基于贝叶斯决策的多部位综合识别策略,利用这种方式对四条路径的检测识别结果进行综合判断,这样就能够最终遴选识别出目标行人。
1.1 多特征协同检测
(1)聚集型B-Haar特征
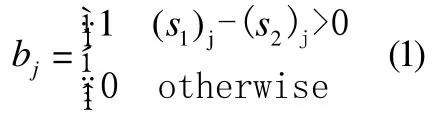
二值化Haar-like特征值可以通过下面的公式1进行计算:
但是,在这里又考虑因单个B-Haar特征太小,会在识别行人过程的应用中,达不到行人统计识别系统对鲁棒性的精度要求。因此,为提高单个B-Haar特征的辨识能力,需组合一组B-Haar特征。其特征值的计算示例图具体见图2。

图2 聚集型B-Haar特征计算示例图
(2)Edgelet特征
对于Edgelet特征来说,其大体上是对行人局部的轮廓特征进行描述,其利用表述人体局部的方式完成对目标对象的识别,这一个算法具有一定的优势,可以识别遮挡的行人。
1.2 贝叶斯决策的多部位综合识别策略
在文献[4]中,其提到了用贝叶斯决策算法针对候选者中的关键部位作综合判决,但是不能够适应人流比较多,遮挡现象严重的复杂场景中。本文所设计的贝叶斯决策的多部位检测策略先把人体划分成四部分,依次为身体躯干、手臂、头肩、腿。这样不同的部位会出现在相应的区域之中,这就在很大程度上缩小了检测范围,保证了系统的实时性。
利用聚集型B-Haar特征检测出的行人中,在Edgelet的行为特征提取里每一个部位均存在可以被检出的可能性,具体如下面的公式2所示:
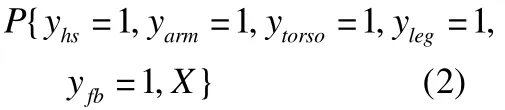
设Fi(Xi)为i部位检测识别器的响应值那么就能够得到每一个部位的后验概率,具体可以通过下列公式4、公式5表示:
式4,式5分别代表的是人体部位识别与未识别出的后验概率,故一个候选目标行人身体的各部位均可以识别出的可能性就可以用下面的公式6进行表达:
故判断候选目标是真正行人的可能性具体能够利用下面的公式:
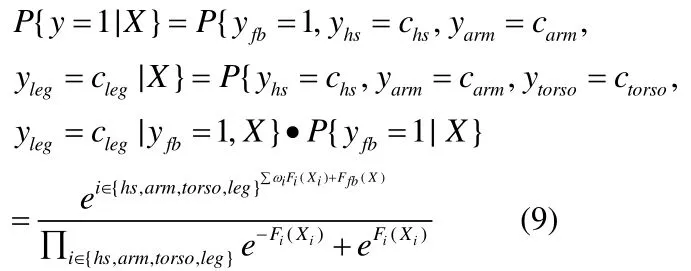
候选行人的置信度为候选目标是真正行人的概率与候选目标是非行人的概率的似然比:
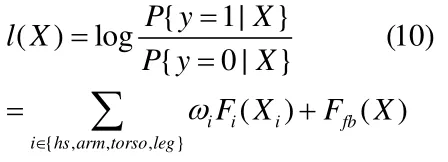
识别模型最终的输出可以通过下面的公式11进行表达:

为候选行人的置信度的阈值,处于这一个区间范围之内[5],在具体实践时,要根据实验效果确定。
2.实验结果及分析
本节主要是通过聚集型B-Haar特征对行人进行提取,而对于精级局部检测识别,其主要是通过特征对人体关键部分特征进行提取,同时与贝叶斯决策进行结合,这样通过组合之后所得到的模型对行人进行识别。每一个单分类器分类算法通过上述文献[5,6]阐明的方法。
将本文所设计的双层组合策略与比较有代表性的文献[3][4]中所提到的分类组合方式进行比较,其具体检测结果见下表1,在这里,方法1,2,3分别是本文设计的双层组合分类器模型,文献[4]和文献[3]阐明的分级行人检测结构与串并联结构组合行人检测结构。通过分析表1,从平均检测率(average detecton rate,这里简称ADR)、平均虚警率(average false alarm rate,这里简称AFAR)、平均检测时间(average detection time,这里简称ADT)
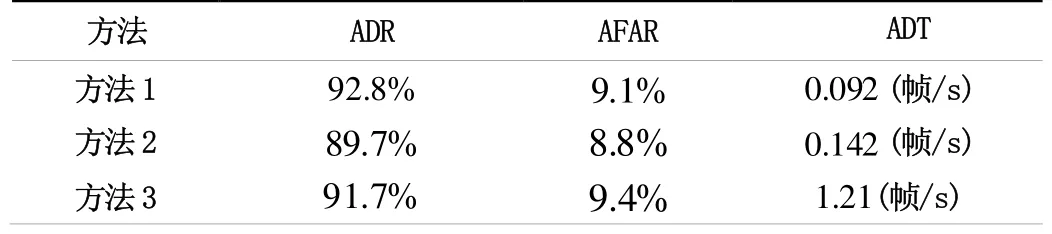
表1 不同方法的检测结果比较
三个方面分析可以发现,方法1存在最好的实时性与检测率,尽管其虚警率指标比方法2少0.3%,然而其平均检测率却比其大3%,所以方法1的综合检测性能比2要好;而对于方法3,尽管其具有相对偏高的检测率,同时其虚警率不是很高,然而这一个方法却具有明显的劣势,即其实时性较差,这种结构在具体检测环境中应用具有较大的难度。因此,本文所设计的双层组合结构具有相对较强的综合性能,能够在很大程度上提高系统的性能,非常有利于整个检测系统在市场上的推广。
总结
本文针对公共场所行人流量统计中行人识别所面临的应用环境复杂、目标多变等问题,在由整体到局部,循序渐近的检测识别思想指导下,以聚集型B-Haar特征和Edgelet特征协调进行特征提取。引入局部二元模式,改进传统的Haar特征,构造出满足光照不变性的聚集型B-Haar特征,缩小检测识别范围,定位出候选区域;再通过Edgelet特征对候选目标的关键部位进行检测,并用贝叶斯决策原理,进行综合判决,实现精级局部识别检测。经过实验对比分析,本文所设计的多特征协同双层组合分类结构行人识别方法与传统的树状结构、串并联结构相比,在实时性、检测率和虚警率上具有明显的整体优势。
[1]朱慧颖,张利,李云廷.基于背景差分法的交通事件智能检测系统[J].武汉理工大学学报,2011,33(2):79-83
[2]薛丽霞,罗艳丽,王佐成.基于帧间差分的自适应运动目标检测方法[J].计算机应用研究,2011,28(4):1551-1552,1559
[3]Gavrila D.M.,Munder S.Multi-cue pedestrian detection and tracking from a moving vehicle[J].International Journal of Computer Vision,2007,73(1):41-59
[4]田广,戚飞虎,朱文佳等.单目移动拍摄下基于人体部位的行人检测[J].系统仿真学报2006,18(10):2906-2910
[5]Zhang Yang,Liu Weiming,Mo Chen,Li Zilong.Pedestrian detection in complex scene using full binary tree classifiers based on locally assembledBinary Haar-like features[C].Intelligent Control and Automation(WCICA),2011 9th World Congress on 21-25 June 2011:1180-1184
[6]张阳,刘伟铭,吴义虎等.代价敏感参数动态寻优机制的行人检测算法[J].计算机工程与应用.2013,11,11:19